A Study on the Effectiveness of the Heading Control on the Mooring Line Tension and Position Offset for an Arctic Floating Structure under Complex Environmental Loads

 , , ,
, , , 
Abstract
:1. Introduction
2. Dynamics in Ice Condition and Procedure to Evaluate the Station-Keeping Performance
2.1. Frequency-Domain Analysis
2.2. Time-Domain Analysis
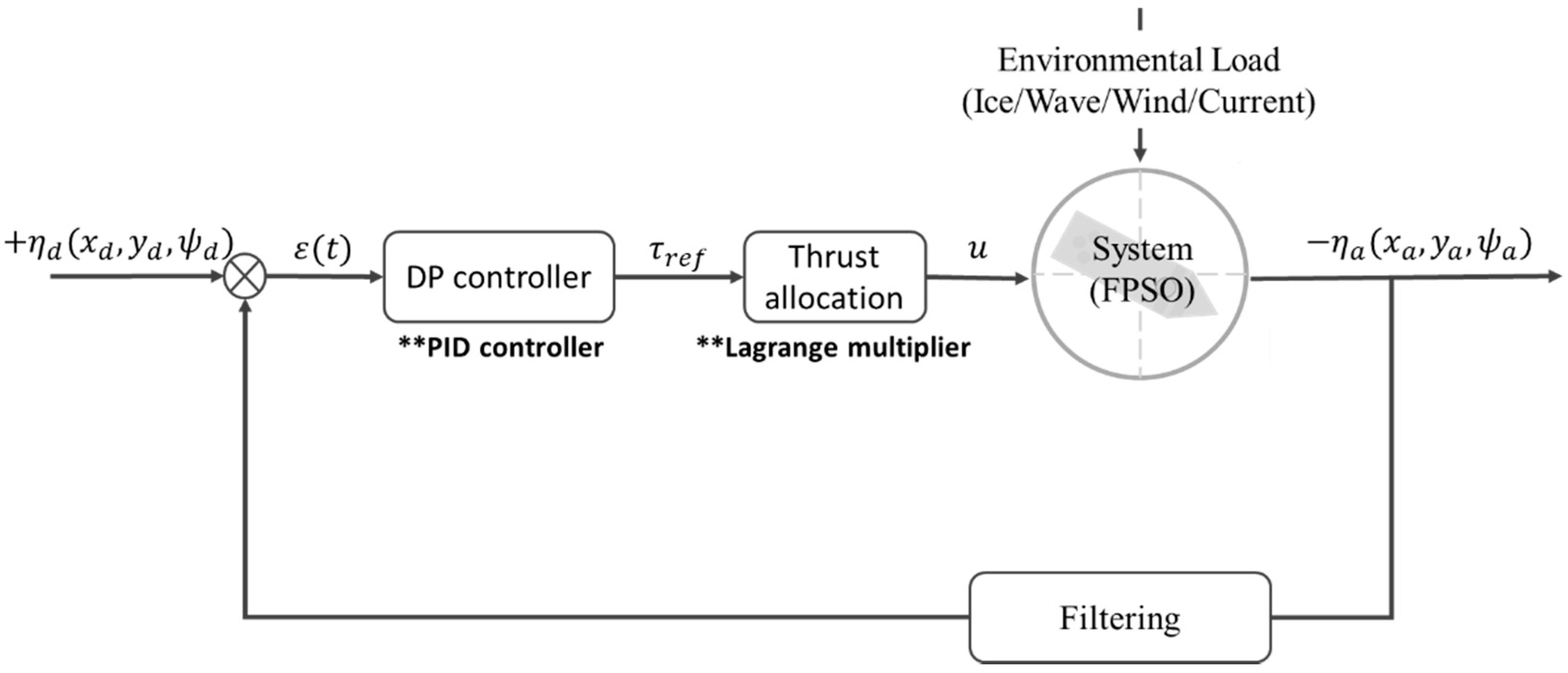
2.3. Forces by the Station Keeping System
2.3.1. Force by the DP System
2.3.2. Force by the Mooring Lines
2.4. Ice-Induced Load
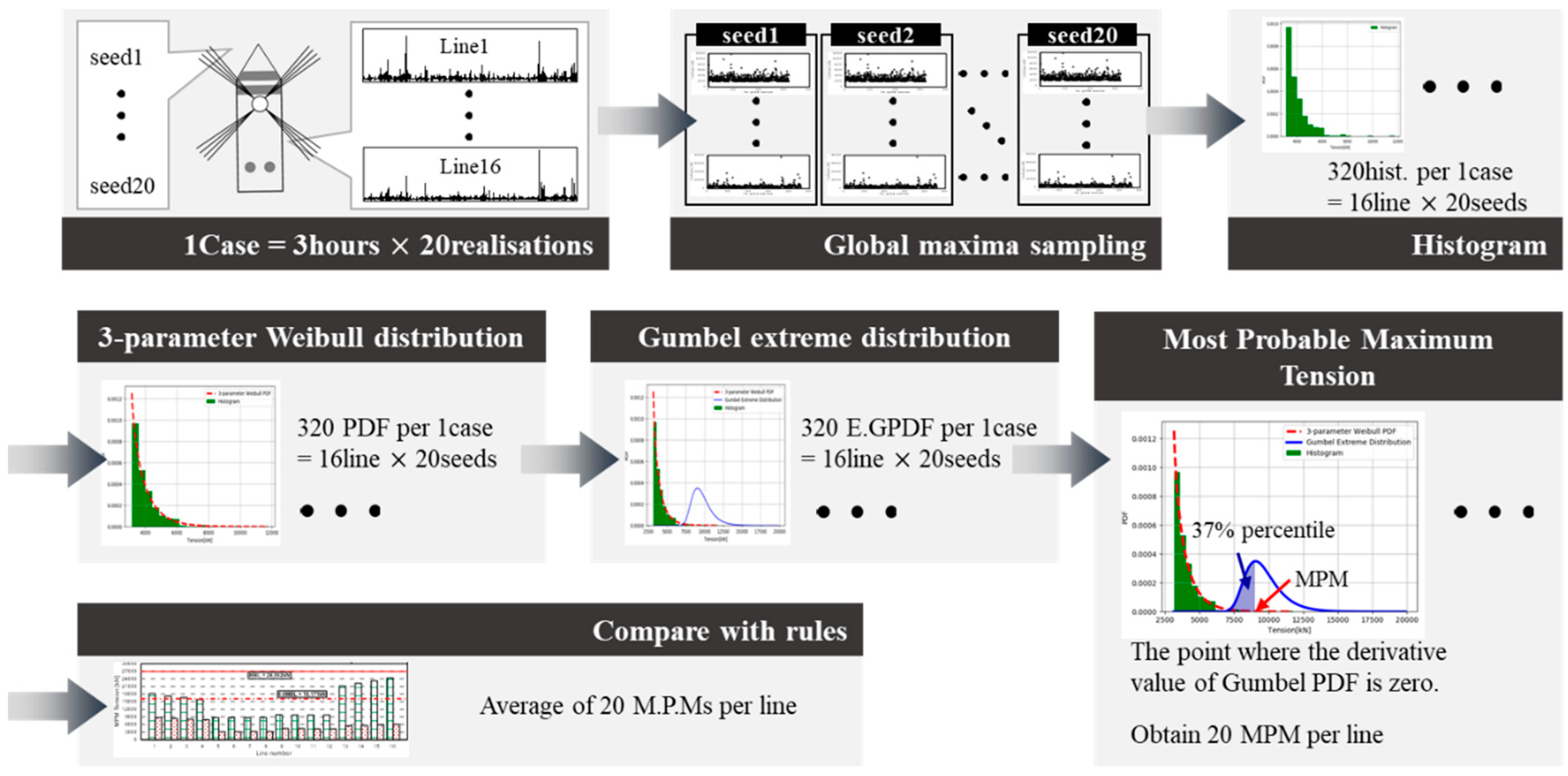
2.5. Procedure for the Statistical Analysis on the Performance
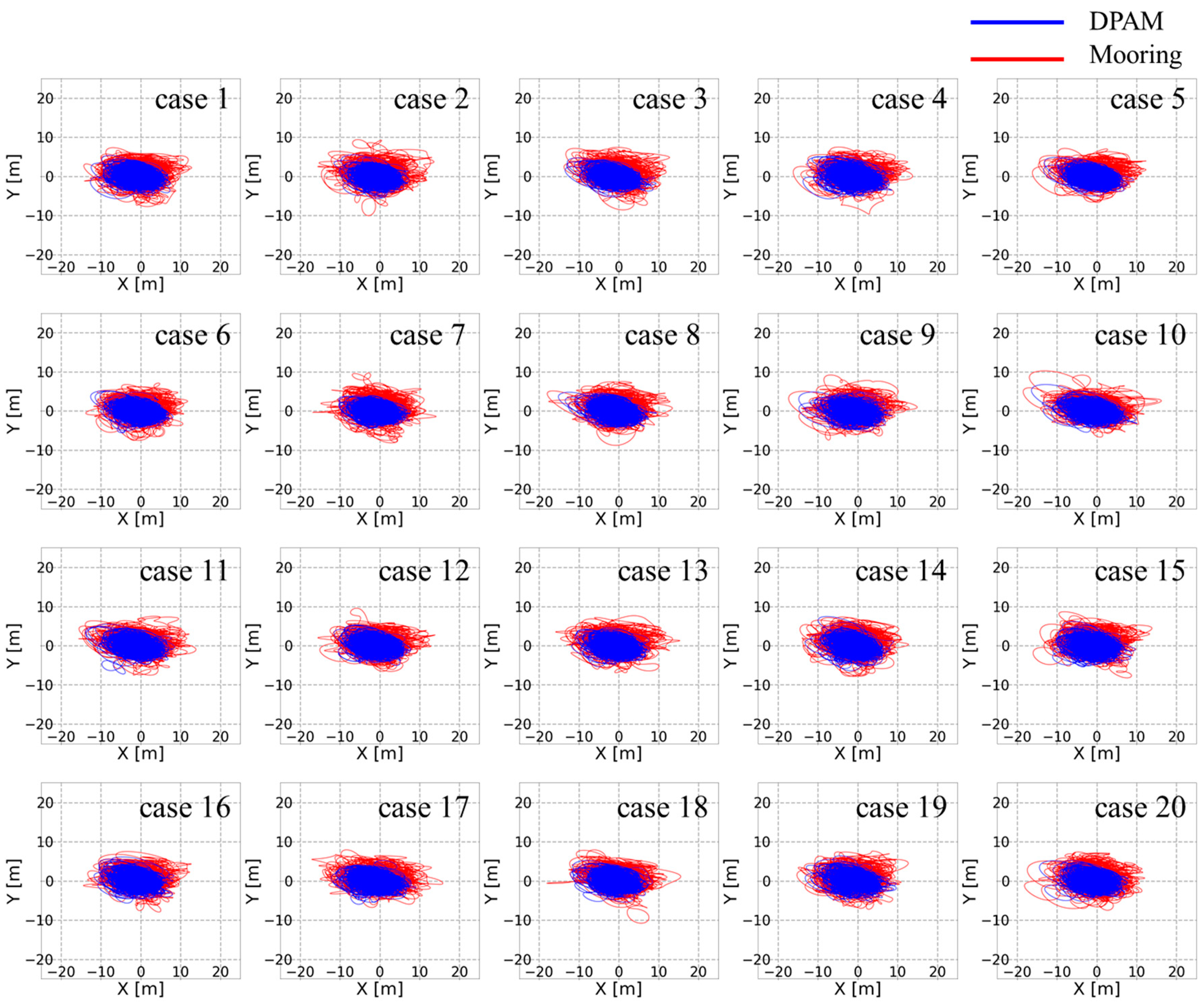
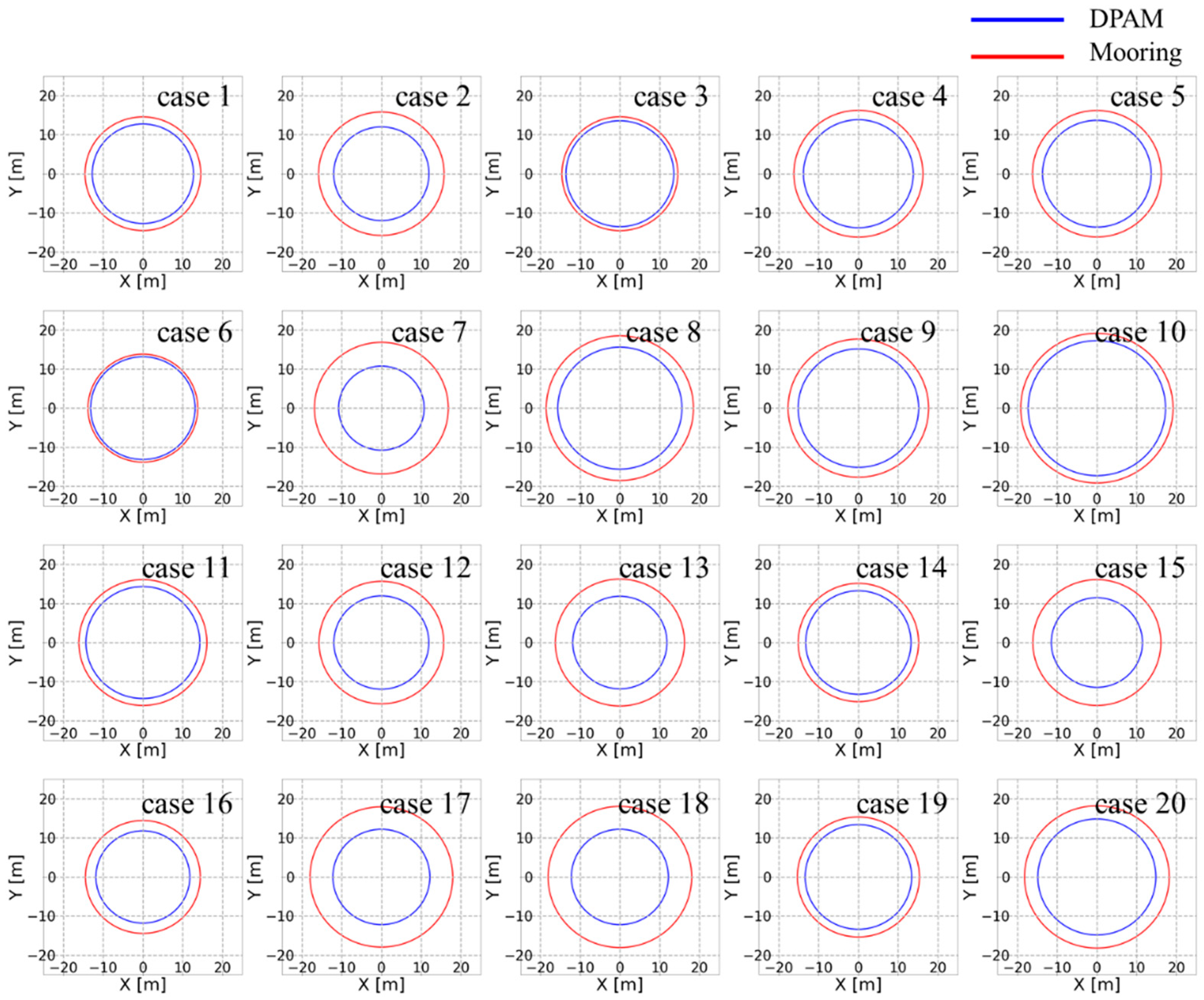
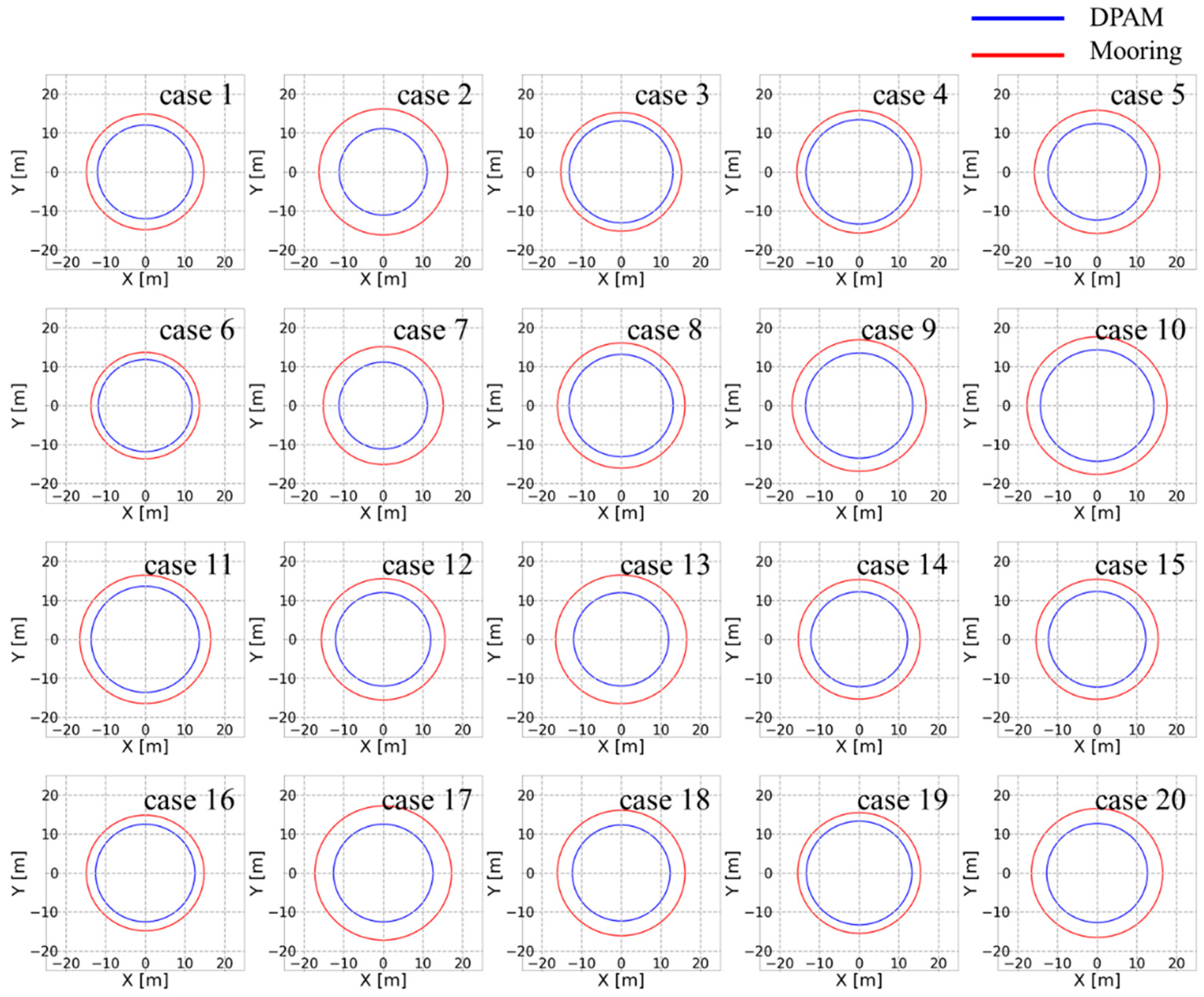
- Time-domain simulations are conducted for 20 different cases with different irregular wave seed under survival or operational condition.
- Global maxima data (mean-up crossing peak value) are sampled from each simulation result.
- The sampled data are rearranged as a probability density function with the 3-parameter Weibull model.
- Since the sampled data are statistically independent, the data are expressed as an extreme distribution by assuming a cumulative distribution function to the power of n. The Gumbel distribution model is recommended for extreme distribution.
- The point at which the tangential slope of the probability density function of the Gumbel extreme distribution is zero is defined as the most MPM value. Twenty MPM values are averaged and compared with the standard of the classification societies, which generally is 60% of MBL.
3. Conditions for the Environment and Simulation
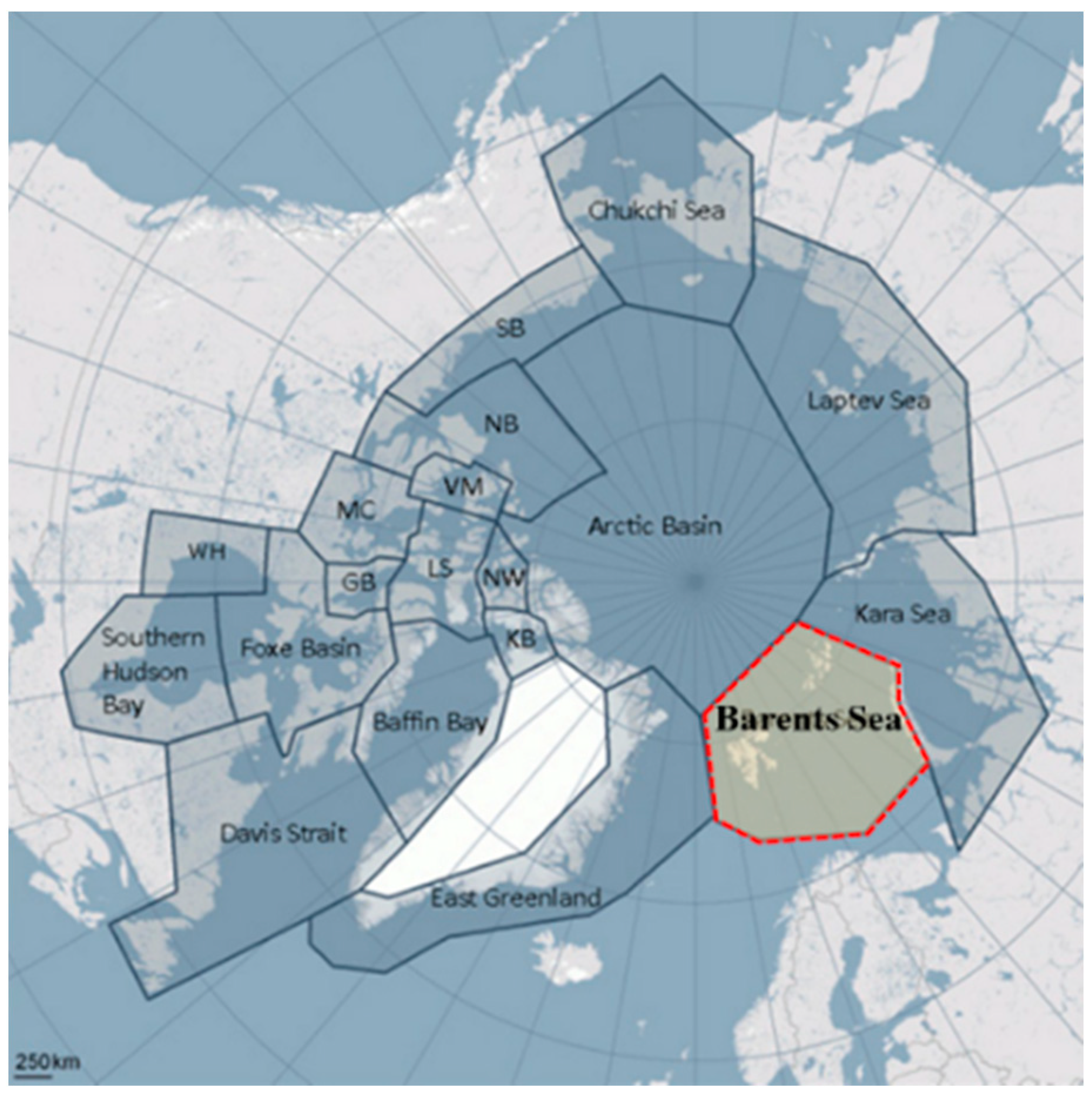
3.1. Information for the Target Site
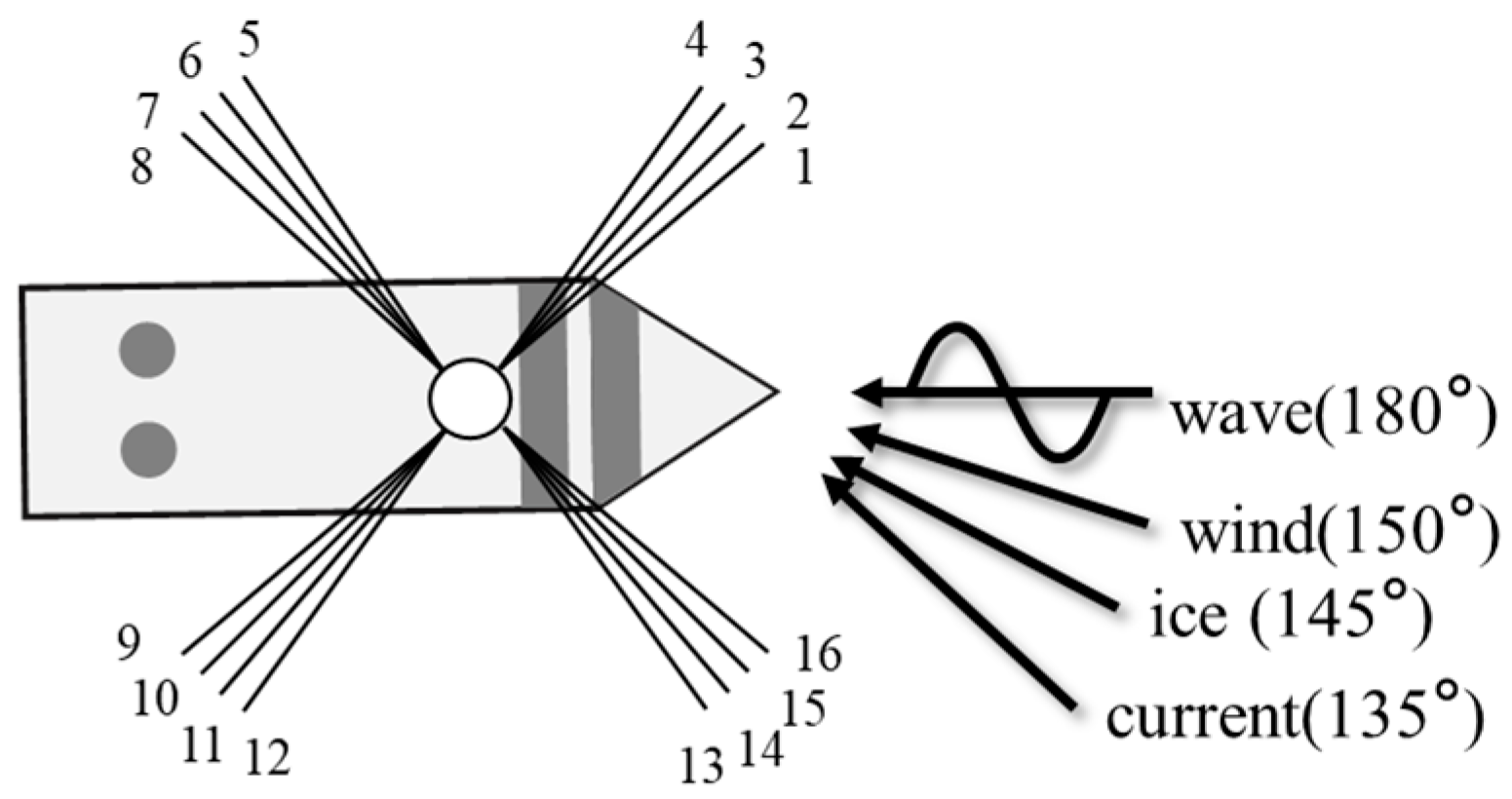
3.2. Information on the Floater and DP-Assisted Mooring System
3.3. Simulator Design for the Time-Domain Analysis
- Current heading angle () of the floater is sent from the solver to the ice module for each time step as an input.
- Mean () and standard deviation () values for , and are interpolated for the given angle based on the nine sets of experimental data described in Section 2.3.
- The random value is generated from the probability density function as .
- Remove the resistance term included in the measurement data.
- The ice load that is generated is sent back to the solver and applied to the center of gravity.
3.4. Setup of the Environmental Conditions for the Time-Domain Analysis
4. Simulation Results
5. Conclusions and Future Work
- The functionalities of the ice load generation module and the DP force generation module were verified and applied to the time-domain analysis with a motion solver. These modules can be used to further assess various scenarios in harsh environmental conditions.
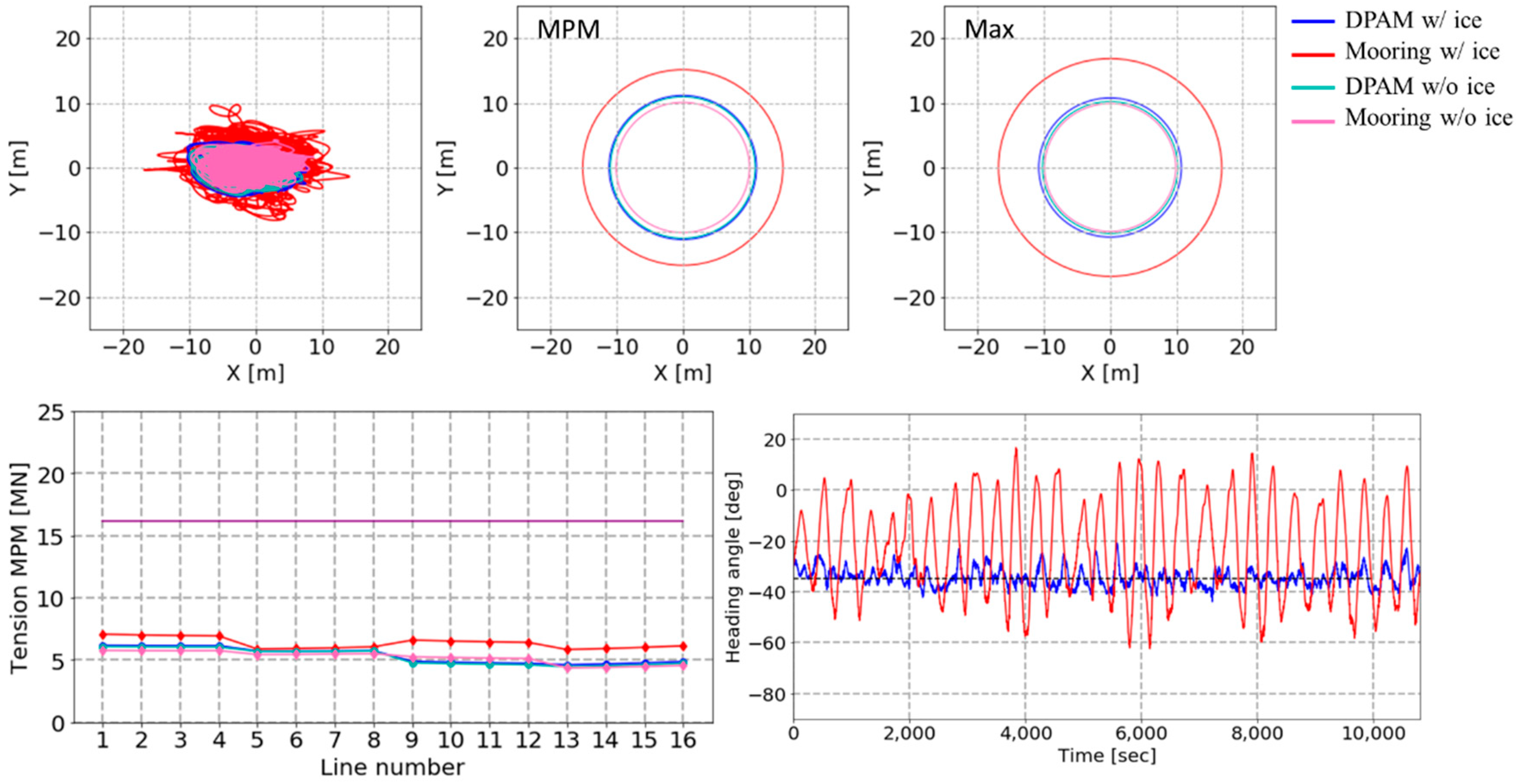
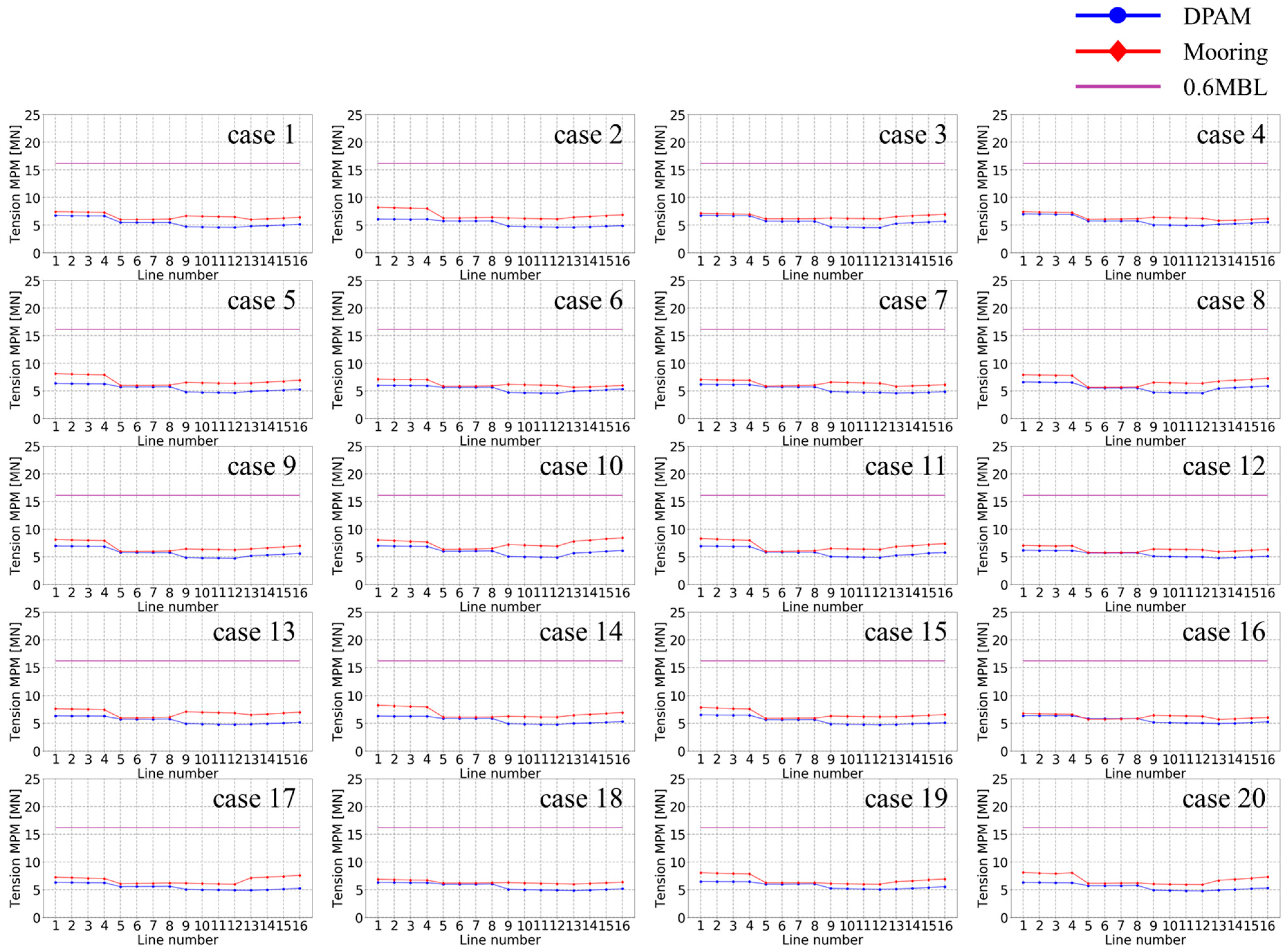
- With the DPAM heading control, the maximum position offset was reduced to 3.1 m (15.4% of the allowable maximum offset of 20 m) based on the average of the 20 cases. The mean value for the reduction of MPM was about 3.3 m (16.3%). The target heading angle was set in the ice drift direction, which was between the wind and current directions. Therefore, the station-keeping performance was enhanced by reducing the drift of complex environmental loads.
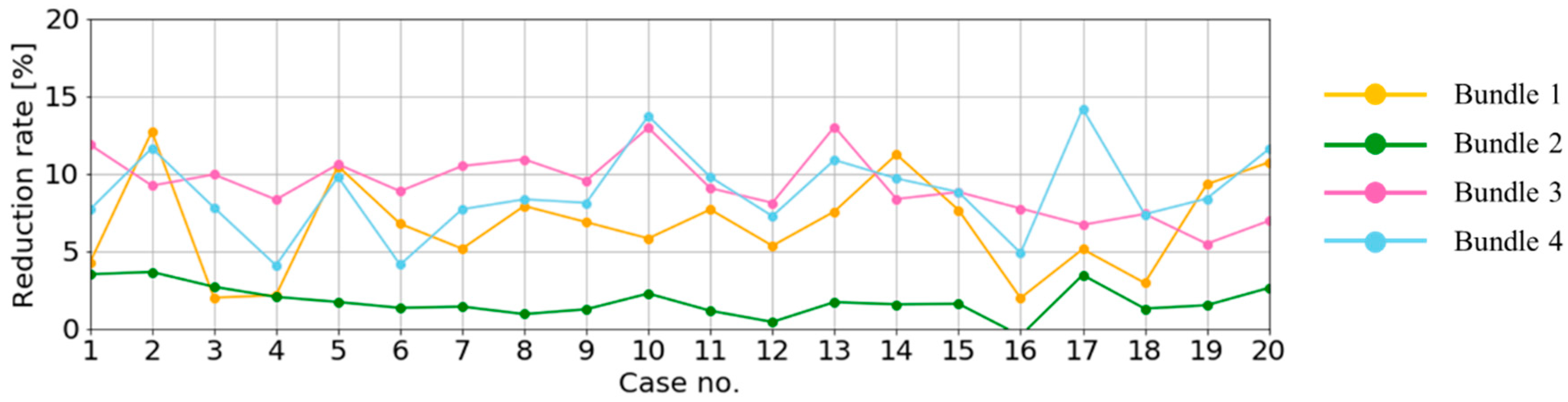
- Except for bundle 2, which had the smallest tensions due to its configuration, the MPM values were reduced by 8.2% with respect to the 0.6 MBL, which was the design criterion Heading control reduces the beam sea situation and lowers the tension on the mooring lines due to the smaller floater motion.
- It is necessary to consider the coupled effect between an ice load and other environmental loads. When the heading angle is larger than a certain limit, the DP thrusters cannot generate an adequate restoring force. This effect cannot be considered by the current module used to generate the ice load. Therefore, a more precise ice module will be developed.
- The direction of the heading control is set such that it is the opposite of the drift direction of the ice floe. This is to consider the significance of the ice load, but the direction may not be the dominant direction in which the floater must be controlled. PID control may have limitations on this issue, and more-complicated, active-type controllers will be studied.
- Further investigation is necessary to determine the relationship between the condition of the ice and a wave. This study considered a 1-year return period (for a significant wave height of 10.3 m), but the condition is still too harsh for the ice field with 80% concentration. Feasible environmental conditions will be analyzed for realistic motion analysis in the time domain.
- As data related to structural design have yet to be prepared, no analysis of vibration was conducted. Further research is necessary because vibration studies related to natural frequencies are essential for the designed floater.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhou, L.; Moan, T.; Riska, K. Heading control for turret-moored vessel in level ice based on Kalman filter with thrust allocation. J. Mar. Sci. Tech. 2013, 18, 460–470. [Google Scholar] [CrossRef]
- Ansari, K.A. Effect of vessel hydrodynamic mass on the station-keeping response of a moored offshore vessel. Trans. ASME 1989, 108, 52–58. [Google Scholar] [CrossRef]
- Choung, J.; Jeon, G.-Y.; Kim, Y. Study on Effective Arrangement of Mooring Lines of Floating-Type Combined Renewable Energy Platform. J. Ocean Eng. Tech. 2013, 27, 22–32. [Google Scholar] [CrossRef] [Green Version]
- API, D. Analysis of Stationkeeping Systems for Floating Structures; API-RP-2SK.; American Petroleum Institute: Washington, DC, USA, 2005. [Google Scholar]
- Moran, K.; Backman, J.; Farrell, J.W. Deepwater drilling in the Arctic Ocean’s permanent sea ice. Proc. Int. Ocean Drill. Program 2006, 302, 2. [Google Scholar]
- Liferov, P.; Serre, N.; Kerkeni, S.; Bridges, R.; Guo, F. Station-Keeping Trials in Ice: Test Scenarios. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018; American Society of Mechanical Engineers: New York, NY, USA, 2018. [Google Scholar]
- Kerkeni, S.; Liferov, P.; Serre, N.; Bridges, R.; Jorgensen, F. Station-Keeping Trials in Ice: Dynamic Positioning in Ice-Results and Learnings. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018; American Society of Mechanical Engineers: New York, NY, USA, 2018. [Google Scholar]
- Jenssen, N.A.; Hals, T.; Jochmann, P.; Haase, A.; dal Santo, X.; Kerkeni, S.; Doucy, O.; Gürtner, A.; Støle Hetschel, S.; Moslet, P.O.; et al. DYPIC—A Multi-National R&D Project on DP Technology in Ice. In Proceedings of the Dynamic Positioning Conference, Houston, TX, USA, 9 October 2012. [Google Scholar]
- Kerkeni, S.; Santo, X.D.; Doucy, O.; Jochmann, P.; Haase, A.; Metrikin, I.; Løset, S.; Jenssen, N.A.; Hals, T.; Gürtner, A.; et al. DYPIC project: Technological and scientific progress opening new perspectives. In Proceedings of the OTC Arctic Technology Conference, Houston, TX, USA, 13 February 2014. [Google Scholar]
- Wang, J.; Sayeed, T.; Millan, D.; Gash, R.; Islam, M.; Millan, J. Ice Model Tests for Dynamic Positioning Vessel in Managed Ice. In Proceedings of the Arctic Technology Conference, St. John’s, NL, Canada, 24–26 October 2016. [Google Scholar]
- Lubbad, R.; Løset, S.; Lu, W.; Tsarau, A.; van den Berg, M. An overview of the Oden Arctic Technology Research Cruise 2015 (OATRC2015) and numerical simulations performed with SAMS driven by data collected during the cruise. Cold Reg. Sci. Technol. 2018, 156, 1–22. [Google Scholar] [CrossRef]
- Lubbad, R.; Løset, S.; Lu, W.; Tsarau, A.; Van Den Berg, M. Simulator for arctic marine structures (SAMS). In Proceedings of the ASME 2018 37th International Conference on Offshore Mechanics and Arctic Engineering—OMAE, Madrid, Spain, 17 June 2018. [Google Scholar]
- Raza, N.; van der Berg, M.; Lu, W.; Lubbad, R. Analysis of Oden Icebreaker Performance in Level Ice using Simulator for Arctic Marine Structures (SAMS). In Proceedings of the 25th International Conference on Port and Ocean Engineering under Arctic Conditions, Delft, The Netherlands, 9–13 June 2019. [Google Scholar]
- Daley, C.; Alawneh, S.; Peters, D.; Quinton, B.; Colbourne, B. GPU Modeling of Ship Operations in Pack Ice. In Proceedings of the International Conference and Exhibition on Performance of Ships and Structures in Ice, Banff, AB, Canada, 17–20 September 2012. [Google Scholar]
- Daley, C.G.; Alawneh, S.; Peters, D.; Blades, G.; Colbourne, B. Simulation of Managed Sea Ice Loads on a Floating Offshore Platform using GPU-Event Mechanics. In Proceedings of the International Conference and Exhibition on Performance of Ships and Structures in Ice IceTech, Banff, AB, Canada, 28–31 July 2014. [Google Scholar]
- Kim, Y.-S.; Kim, J.-H.; Kang, K.-J.; Han, S.; Kim, J. Ice Load Generation in Time Domain Based on Ice Load Spectrum for Arctic Offshore Structures. J. Ocean Eng. Tech. 2018, 32, 411–418. [Google Scholar] [CrossRef]
- Kang, H.H.; Lee, D.; Lim, J.; Lee, S.J.; Jang, J.; Jung, K.; Lee, J. Development of Ice Load Generation Module to Evaluate Station Keeping Performance for Arctic Floating Structures in Time Domain. J. Ocean Eng. Tech. 2020, 34, 394–405. [Google Scholar] [CrossRef]
- Ghafari, H.; Dardel, M. Parametric study of catenary mooring system on the dynamic response of the semi-submersible platform. Ocean Eng. 2018, 153, 319–332. [Google Scholar] [CrossRef]
- Orcaflex Morison Elements. Available online: https://www.orcina.com/webhelp/OrcaFlex/Content/html/Morisonelements.htm (accessed on 20 December 2020).
- Trunbull, I.D.; Torbati, R.Z.; Taylor, R.S. Relative influences of the metocean forcings on the drifting ice pack and estimation of internal ice stress gradients in the Labrador Sea. J. Geophys. Res. Oceans 2017, 122, 5970–5997. [Google Scholar] [CrossRef]
- DNV, G.L. Offshore Standard: Position Mooring; DNVGL-OS-E301; DNV GL: Oslo, Norway, 2015. [Google Scholar]
- Veritas, B. Classification of Mooring Systems for Permanent and Mobile Offshore Units; NR-493-DT-R03-E; BV: Neuilly sur Seine, France, 2015. [Google Scholar]
- IUCN/SSC PBSH Barents Sea (BS). Available online: http://pbsg.npolar.no/en/status/populations/barents-sea.html (accessed on 20 December 2020).
- Park, S.B.; Shin, S.Y.; Shin, D.G.; Jung, K.H.; Choi, Y.H.; Lee, J.; Lee, S.J. Extreme Value Analysis of Metocean Data for Barents Sea. J. Ocean Eng. Technol. 2020, 34, 26–36. [Google Scholar] [CrossRef]
- Kujala, P.; Suominen, M.; Riska, K. Statistics of Ice Loads Measured on Mt Uikku in the Baltic. In Proceedings of the 20th International Conference on Port and Ocean Engineering under Arctic Conditions, Luleå, Sweden, 9–12 June 2009. [Google Scholar]
- Suominen, M.; Kujala, P.; Romanoff, J.; Remes, H. Influence of load length on short-term ice load statistics in full-scale. Mar. Struct. 2017, 52, 153–172. [Google Scholar] [CrossRef]
- Sutherland, B.R.; Balmforth, N.J. Damping of surface waves by floating particles. Phys. Rev. Fluids 2019, 4, 010804. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Return Period (yrs) | Wave | Wind (m/s) | Current (m/s) | ||
|---|---|---|---|---|---|
| Significant Wave Height (m) | Peak Period (s) | Peakedness Parameter | |||
| 1 | 10.30 | 13.71 | 2.31 | 26.03 | 0.66 |
| 10 | 12.45 | 14.97 | 2.39 | 29.10 | 0.78 |
| 20 | 13.08 | 15.34 | 2.39 | 29.96 | 0.82 |
| 50 | 13.91 | 15.82 | 2.39 | 31.06 | 0.87 |
| 100 | 14.54 | 16.18 | 2.39 | 31.86 | 0.90 |
| Description | Magnitude | Unit |
|---|---|---|
| LPP | 244 | |
| Breath | 50 | |
| Draft | 18.6 | |
| Displacement | 169614 | |
| VCG | 19.5 |
| Turret No. | Type of Thruster | Thrust (kN) | x (m) | y (m) | z (m) |
|---|---|---|---|---|---|
| ① | tunnel | 330 | 98.3 | 0 | 0 |
| ② | tunnel | 330 | 93.3 | 0 | 0 |
| ③ | azipod | 1600 | −105.7 | 6.5 | 0 |
| ④ | azipod | 1600 | −105.7 | −6.5 | 0 |
| Wave | Wind | Current | Ice | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Hs (m) | Tp (s) | Velocity (m/s) | Velocity (m/s) | Thickness (m) | Length (m) | Speed (m/s) | Concentration | Shape | |
| 10.30 | 13.71 | 2.31 | 31.86 | 0.78 | 1.4 | 12 | 0.514 | 0.8 | irregular |
| Case No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| maximum offset (%) | 9 | 19 | 5 | 12 | 13 | 3 | 30 | 15 | 13 | 9 | 9 | 19 | 22 | 9 | 23 | 13 | 29 | 29 | 10 | 17 |
| MPM (%) | 14 | 25 | 11 | 11 | 17 | 9 | 20 | 15 | 17 | 17 | 14 | 18 | 23 | 16 | 16 | 12 | 23 | 19 | 11 | 19 |
| Case No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Bundle 1 | 9 | 25 | 5 | 5 | 21 | 15 | 12 | 16 | 14 | 12 | 15 | 12 | 16 | 22 | 16 | 5 | 12 | 7 | 19 | 22 |
| Bundle 2 | 9 | 9 | 7 | 5 | 5 | 4 | 4 | 3 | 3 | 6 | 3 | 1 | 5 | 4 | 4 | −1 | 9 | 3 | 4 | 7 |
| Bundle 3 | 29 | 24 | 26 | 21 | 26 | 23 | 26 | 27 | 24 | 30 | 23 | 21 | 30 | 22 | 23 | 20 | 18 | 19 | 15 | 19 |
| Bundle 4 | 20 | 28 | 19 | 11 | 24 | 11 | 21 | 19 | 20 | 27 | 22 | 19 | 26 | 23 | 22 | 13 | 31 | 19 | 20 | 27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, H.H.; Lee, D.-S.; Lim, J.-S.; Lee, S.J.; Jang, J.; Jung, K.H.; Lee, J. A Study on the Effectiveness of the Heading Control on the Mooring Line Tension and Position Offset for an Arctic Floating Structure under Complex Environmental Loads. J. Mar. Sci. Eng. 2021, 9, 102. https://doi.org/10.3390/jmse9020102
Kang HH, Lee D-S, Lim J-S, Lee SJ, Jang J, Jung KH, Lee J. A Study on the Effectiveness of the Heading Control on the Mooring Line Tension and Position Offset for an Arctic Floating Structure under Complex Environmental Loads. Journal of Marine Science and Engineering. 2021; 9(2):102. https://doi.org/10.3390/jmse9020102
Chicago/Turabian StyleKang, Hyun Hwa, Dae-Soo Lee, Ji-Su Lim, Seung Jae Lee, Jinho Jang, Kwang Hyo Jung, and Jaeyong Lee. 2021. "A Study on the Effectiveness of the Heading Control on the Mooring Line Tension and Position Offset for an Arctic Floating Structure under Complex Environmental Loads" Journal of Marine Science and Engineering 9, no. 2: 102. https://doi.org/10.3390/jmse9020102