High-Fidelity Router Emulation Technologies Based on Multi-Scale Virtualization †


Abstract
:1. Introduction
- We propose a high-fidelity router emulation scheme that consists of virtualization plane, routing plane, and a traffic control method. We focus on the composition of a traffic control method, which uses the “drop from tail” algorithm as the buffer queue management, the first in, first out (FIFO) method as the buffer queue scheduling rule, and the delay waiting method as the bandwidth control module. The specially designed bandwidth control module can solve the distortion of virtual router.
- We customized our traffic control module separately in the Network Protocol Stack in the Linux kernel of KVM and the user space of Docker, building a KVM-based virtual router and a Docker-based virtual router. Docker has many advantages, such as a light weight, small resource occupation, and convenient migration. It helped us extend the router emulation scheme to multi-scale virtualization, and greatly expands the scale of emulation topology.
- To verify the fidelity and practicality of our KVM and Docker virtual routers, we integrated the two virtualization methods, Docker and KVM, built a complex inter-AS network topology with 3000 virtual routers and 5179 links, and successfully simulated LDoS attack behavior. This proves the effectiveness of our emulation method, and it is also meaningful for improving the emulation fidelity in congestion scenarios.
2. Related Work
3. Router Emulation Architecture
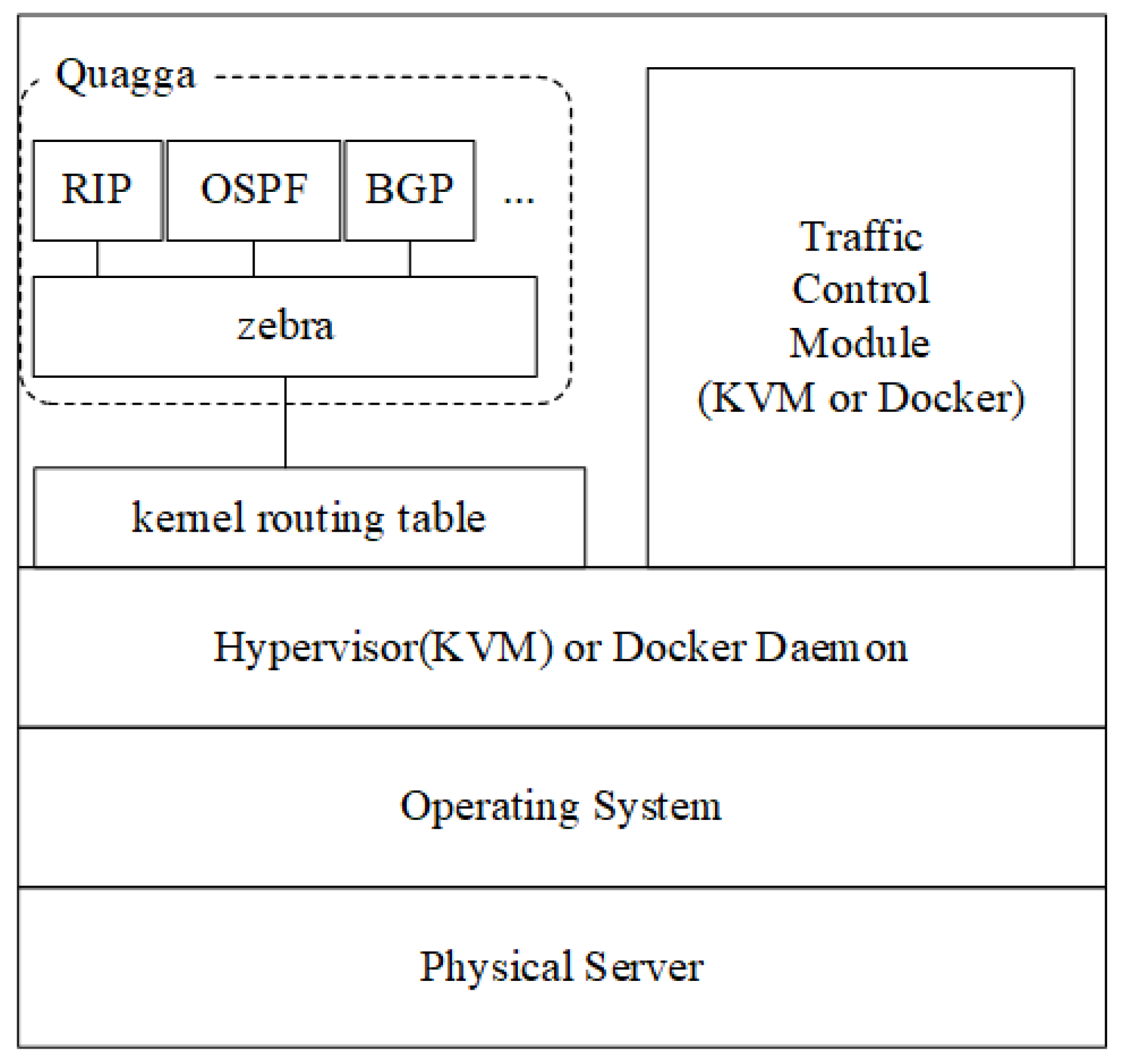
3.1. Virtual Router
3.2. Traffic Control
3.2.1. Problem Statement
3.2.2. Traffic Control Method
| Algorithm 1. Bandwidth control algorithm. |
| Input: |
| , B; |
| // is the packet dequeued from the FIFO queue header; B is the bandwidth value that we need to emulate. |
| Output: |
| ; |
| 1: Obtain the length of ; |
| 2: ; |
| 3: Retrieve the current system time; |
| 4: ; |
| 5: while |
| 6: Retrieve the current system time; |
| 7: end while |
| 8: return ; |
| //network interface driver sends the packet |
4. Router Emulation Implementation
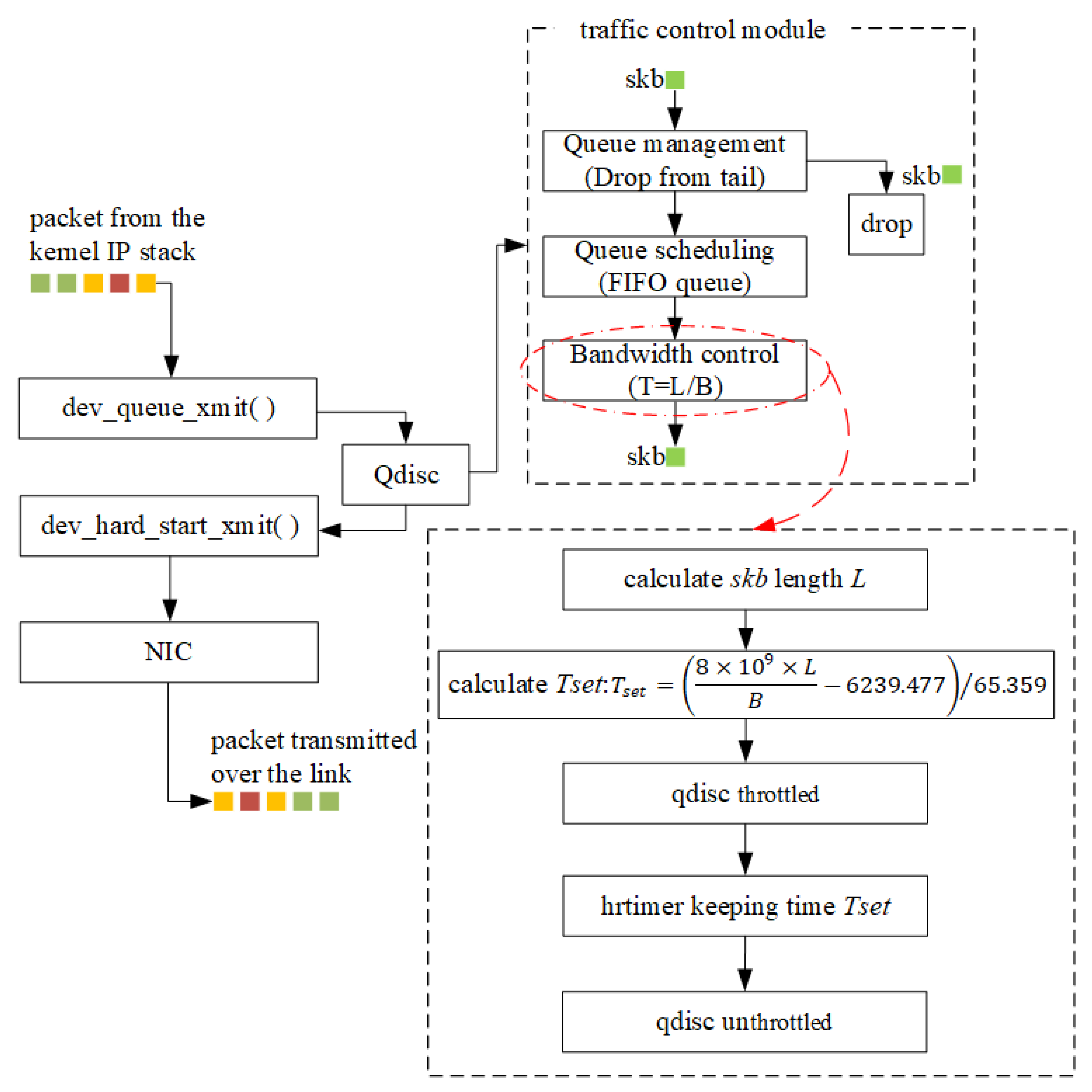
4.1. KVM-Based Traffic Control Module
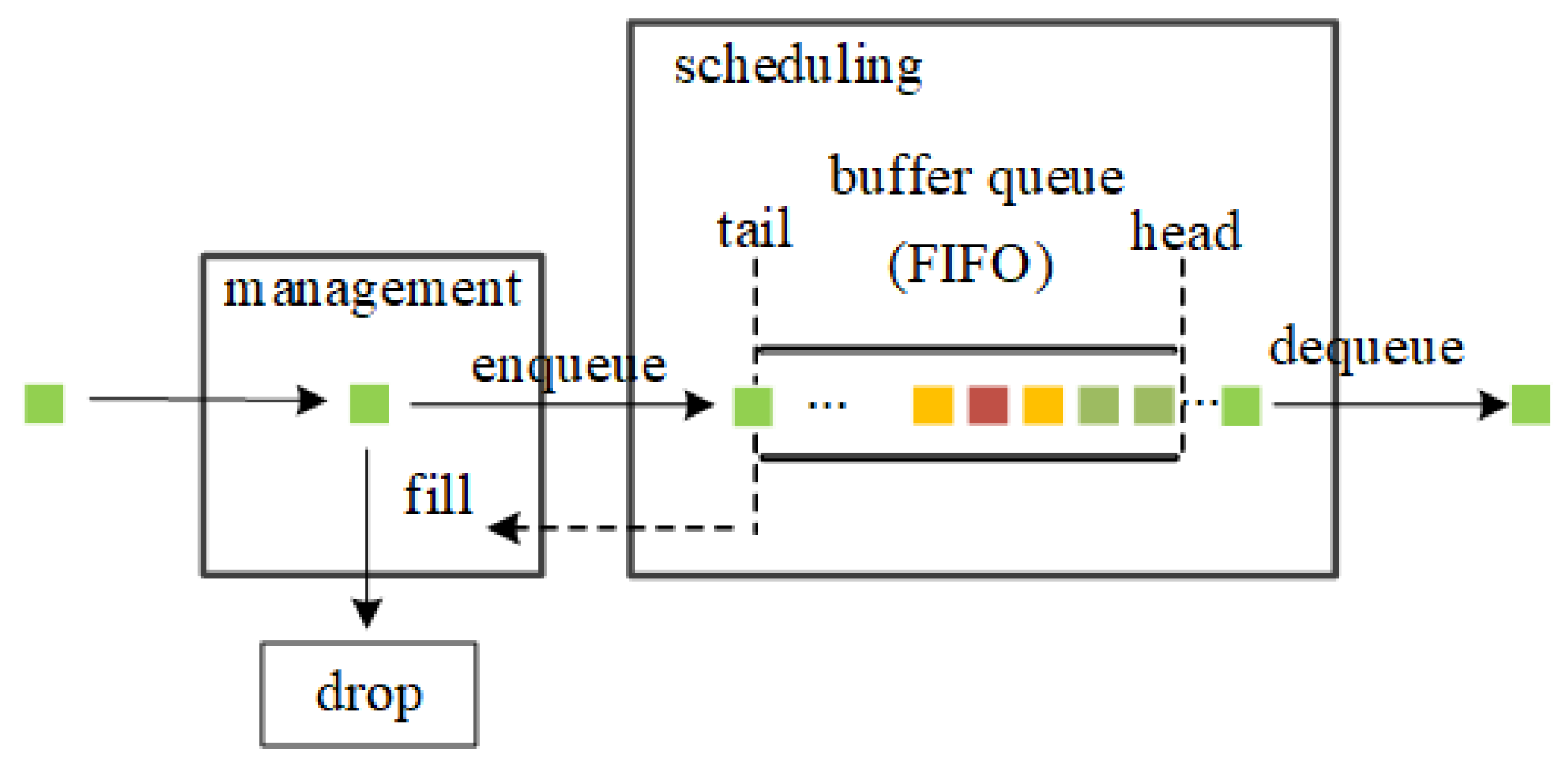
- Queue management: This module is responsible for receiving the packets delivered by the Linux kernel IP Stack and determining whether each packet enters the queue scheduling module or is dropped according to the drop from tail algorithm.
- Queue scheduling: This module is designed to initialize the FIFO buffer queue and sort the packets entering the buffer queue according to the FIFO principle.
- Bandwidth control: This part is the most important module. It obtains each dequeued packet from the queue scheduling module and calculates its delay time T. By calling the hrtimer (a high-resolution timer) in the kernel to perform the delay operation, the bandwidth control module can emulate the packet transmission situation under the available bandwidth B.
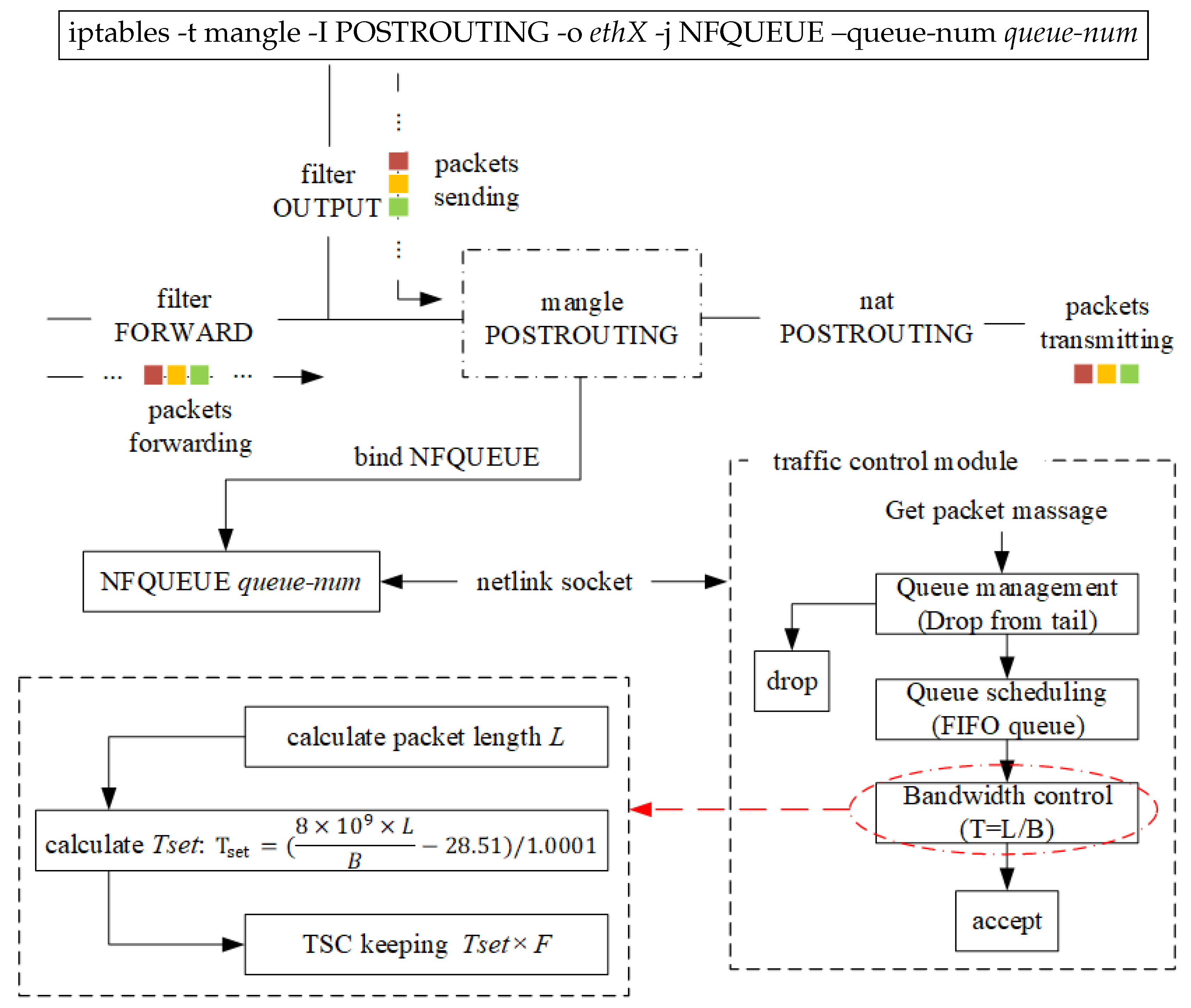
4.2. Docker-Based Traffic Control Module
5. Experiment and Evaluation
- We evaluated the error between the set bandwidth and the actual bandwidth of the virtual router to demonstrate the effectiveness of our traffic control method.
- We compared the packet loss rate of the virtual router with that of a Cisco physical router to demonstrate the fidelity of our traffic control method.
- We compared the results of emulated BGP-DDoS and BGP-LDoS attacks in a physical network topology, a TC-based virtual topology, and a virtual topology based on our method to further validate the fidelity of our router emulation.
- Based on the OpenStack platform, we constructed a large-scale LDoS emulation scenario including both the KVM-based virtual router and the Docker-based virtual router to demonstrate the importance and value of our high-fidelity router emulation research in the network emulation domain.
5.1. Experimental Environment
5.2. Bandwidth Evaluation
5.3. Loss Rate Evaluation
5.4. Evaluation by Emulated DDoS and LDoS Attacks
5.4.1. DDoS Emulation
5.4.2. LDoS Emulation
5.5. Evaluation of a Large-Scale LDoS Emulation
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Pham, C.; Tang, D.; Chinen, K.; Beuran, R. Cyris: A cyber range instantiation system for facilitating security training. In Proceedings of the Seventh Symposium on Information and Communication Technology; ACM: New York, NY, USA, 2016; pp. 251–258. [Google Scholar]
- Andel, T.R.; Stewart, K.E.; Humphries, J.W. Using virtualization for cyber security education and experimentation. In Proceedings of the 14th Colloquium for Information System Security Education (CISSE), Baltimore, MD, USA, 7–9 June 2010. [Google Scholar]
- Dutta, A.; Gnawali, O. Large-scale network protocol emulation on commodity cloud. In Proceedings of the Global Communications Conference (GLOBECOM), Austin, TX, USA, 8–12 December 2014. [Google Scholar]
- Muelas, D.; Ramos, J.; López de Vergara, J. Software-driven definition of virtual testbeds to validate emergent network technologies. Information 2018, 9, 45. [Google Scholar] [CrossRef] [Green Version]
- Abeni, L.; Kiraly, C.; Li, N.; Bianco, A. On the performanc of KVM-based virtual routers. Comput. Commun. 2015, 70, 40–53. [Google Scholar] [CrossRef]
- Huang, M.H.; Zhang, Y.X.; Fei, X.U. Design of Routing Simulation Experiment Platform Based on Virtualization Technology. J. Syst. Simul. 2014, 26, 1672–1677. [Google Scholar]
- Li, H.; Zhou, H.; Zhang, H.; Shi, W. EmuStack: An OpenStack-Based DTN Network Emulation Platform. In Proceedings of the International Conference on Networking & Network Applications, Hokkaido, Japan, 23–25 July 2016. [Google Scholar]
- Benet, C.H.; Nasim, R.; Noghani, K.A.; Kassler, A. OpenStackEmu—A cloud testbed combining network emulation with OpenStack and SDN. In Proceedings of the 2017 14th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2017; pp. 566–568. [Google Scholar]
- Kang, M.S.; Lee, S.B.; Gligor V, D. The crossfire attack. In Proceedings of the 2013 IEEE Symposium on Security and Privacy, Berkeley, CA, USA, 19–22 May 2013; pp. 127–141. [Google Scholar]
- Li, H.; Zhu, J.; Wang, Q.; Zhou, T.; Qiu, H.; Li, H. LAAEM: A Method to Enhance LDoS Attack. IEEE Commun. Lett. 2016, 20, 708–711. [Google Scholar] [CrossRef]
- Wang, X.; Zhai, M.; Zhang, G. Research on High-Fidelity Router Emulation Technologies Based on Cloud Platform. In Proceedings of the 2018 IEEE 7th International Conference on Cloud Networking (CloudNet), Tokyo, Japan, 22–24 October 2018; pp. 1–4. [Google Scholar]
- Schuchard, M.; Mohaisen, A.; Foo Kune, D.; Hopper, N.; Kim, Y.; Vasserman, E.Y. Losing control of the internet: Using the data plane to attack the control plane. In Proceedings of the 17th ACM Conference on Computer and Communications Security; ACM: New York, NY, USA, 2010. [Google Scholar]
- Guo, X.; Jiao, L.; Qiu, Y.; Ge, L. Design and implementation of a multi-path inter-domain routing simulator based on Click and NS2. J. Shangdong Univ. (Nat. Sci.) 2013, 48, 36–43. [Google Scholar]
- Hou, C. Research on OpenFlow Network Software Routing. J. Lanzhou Univ. Nat. Sci. 2013, 120–123. [Google Scholar]
- Zhang, Y.; Xu, M.; Li, Q. VegaNet Network Virtual Router. Chin. J. Comput. 2014, 37, 2342–2352. [Google Scholar]
- Kamla, R.Z.; Yahiya, T.A.; Mustafa, N. An Implementation of Software Routing for Building a Private Cloud. Int. J. Comput. Netw. Inf. Secur. 2018, 3, 1–7. [Google Scholar]
- Almesberger, W. Linux Network Traffic Control—Implementation Overview. 1999. Available online: https://www.almesberger.net/cv/papers/tcio8.pdf (accessed on 16 January 2020).
- Salim, J.H. Linux Traffic Control Classifier-Action Subsystem Architecture. In Proceedings of the Netdev 0.1, Ottawa, ON, Canada, 14–17 February 2015. [Google Scholar]
- Liu, Y.; Zhang, H.; Ye, H.; Li, J.; Wang, X.; Zhang, G. Research on satellite link emulation for space-ground integration information network. J. Commun. 2018, 39, 56–67. [Google Scholar]
- Mendoza, F.; Ferrus, R.; Sallent, O. Experimental proof of concept of an SDN-based traffic engineering solution for hybrid satellite-terrestrial mobile backhauling. Int. J. Satell. Commun. Netw. 2019, 37, 630–645. [Google Scholar] [CrossRef]
- Chirammal, H.D.; Mukhedkar, P.; Vettathu, A. Mastering KVM Virtualization; Packt Publishing Ltd.: Birmingham, UK, 2016. [Google Scholar]
- Merkel, D. Docker: Lightweight linux containers for consistent development and deployment. Linux J. 2014, 2014, 2. [Google Scholar]
- Bernstein, D. Containers and cloud: From lxc to docker to kubernetes. IEEE Cloud Comput. 2014, 1, 81–84. [Google Scholar] [CrossRef]
- Jakma, P.; Lamparter, D. Introduction to the quagga routing suite. IEEE Netw. 2014, 28, 42–48. [Google Scholar] [CrossRef]
- Durner, R.; Blenk, A.; Kellerer, W. Performance study of dynamic QoS management for OpenFlow-enabled SDN switches. In Proceedings of the 2015 IEEE 23rd International Symposium on Quality of Service (IWQoS), Portland, OR, USA, 15–16 June 2015; pp. 177–182. [Google Scholar]
- Wei, X. Research and Analysis of Scheduling Mechanism Impact on Network QoS. In Proceedings of the 2011 International Conference on Internet Computing and Information Services, Hong Kong, China, 17–18 September 2011; pp. 488–490. [Google Scholar]
- Lo, S.C.; Chiang, M.H.; Liou, J.H.; Gao, J.S. Routing and buffering strategies in delay-tolerant networks: Survey and evaluation. In Proceedings of the 2011 40th International Conference on Parallel Processing Workshops, Taipei City, Taiwan, 13–16 September 2011; pp. 91–100. [Google Scholar]
- Zhong, Q.; Shen, G.; Li, D. Token Bucket-Based Traffic Limiting Method and Apparatus. U.S. Patent 9,363,184[P], 7 June 2016. [Google Scholar]
- Li, H.; Zhu, J.; Qiu, H.; Zhou, T.; Li, H. The new threat to internet: DNP attack with the attacking flows strategizing technology. Int. J. Commun. Syst. 2015, 28, 1126–1139. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| KVM-Based | Docker-Based | |||
|---|---|---|---|---|
| Set Bandwidth | Bandwidth | Error | Bandwidth | Error |
| 100 Mbps | 96 Mbps | 4.0% | 96 Mbps | 4.0% |
| 300 Mbps | 284 Mbps | 5.3% | 283 Mbps | 5.6% |
| 500 Mbps | 473 Mbps | 5.4% | 475 Mbps | 5.0% |
| 700 Mbps | 655 Mbps | 6.4% | 661 Mbps | 5.5% |
| 900 Mbps | 851 Mbps | 5.4% | 859 Mbps | 4.5% |
| 1 Gbps | 968 Mbps | 3.2% | 960 Mbps | 4.0% |
| UDP Flow | Cisco Router | KVM-Based | Docker-Based |
|---|---|---|---|
| 0 bps | 0% | 0% | 0% |
| 0.5 Gbps | 0% | 0% | 0% |
| 1 Gbps | 22% | 21% | 20% |
| 1.5 Gbps | 53% | 50% | 54% |
| 2 Gbps | 71% | 70% | 69% |
| 2.5 Gbps | 80% | 80% | 79% |
| 3 Gbps | 82% | 83% | 81% |
| Attack Flow | BGP Session Reset Time | ||||
|---|---|---|---|---|---|
| Cisco Router | KVM-TC | KVM-Our | Docker-Our | ||
| 2 Gbps | 20 | 0 | 22 | 20 | |
| DDoS | 2.5 Gbps | 39 | 0 | 38 | 38 |
| 3 Gbps | 43 | 0 | 41 | 42 | |
| 2 Gbps | 5 | 0 | 5 | 4 | |
| LDoS | 2.5 Gbps | 8 | 0 | 9 | 8 |
| 3 Gbps | 14 | 0 | 15 | 16 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, H.; Wang, X.; Zhai, M.; Zhang, G. High-Fidelity Router Emulation Technologies Based on Multi-Scale Virtualization. Information 2020, 11, 47. https://doi.org/10.3390/info11010047
Song H, Wang X, Zhai M, Zhang G. High-Fidelity Router Emulation Technologies Based on Multi-Scale Virtualization. Information. 2020; 11(1):47. https://doi.org/10.3390/info11010047
Chicago/Turabian StyleSong, He, Xiaofeng Wang, Mengdong Zhai, and Guangjie Zhang. 2020. "High-Fidelity Router Emulation Technologies Based on Multi-Scale Virtualization" Information 11, no. 1: 47. https://doi.org/10.3390/info11010047
APA StyleSong, H., Wang, X., Zhai, M., & Zhang, G. (2020). High-Fidelity Router Emulation Technologies Based on Multi-Scale Virtualization. Information, 11(1), 47. https://doi.org/10.3390/info11010047