
Virtual Diagnostic Suite for Electron Beam Prediction and Control at FACET-II

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
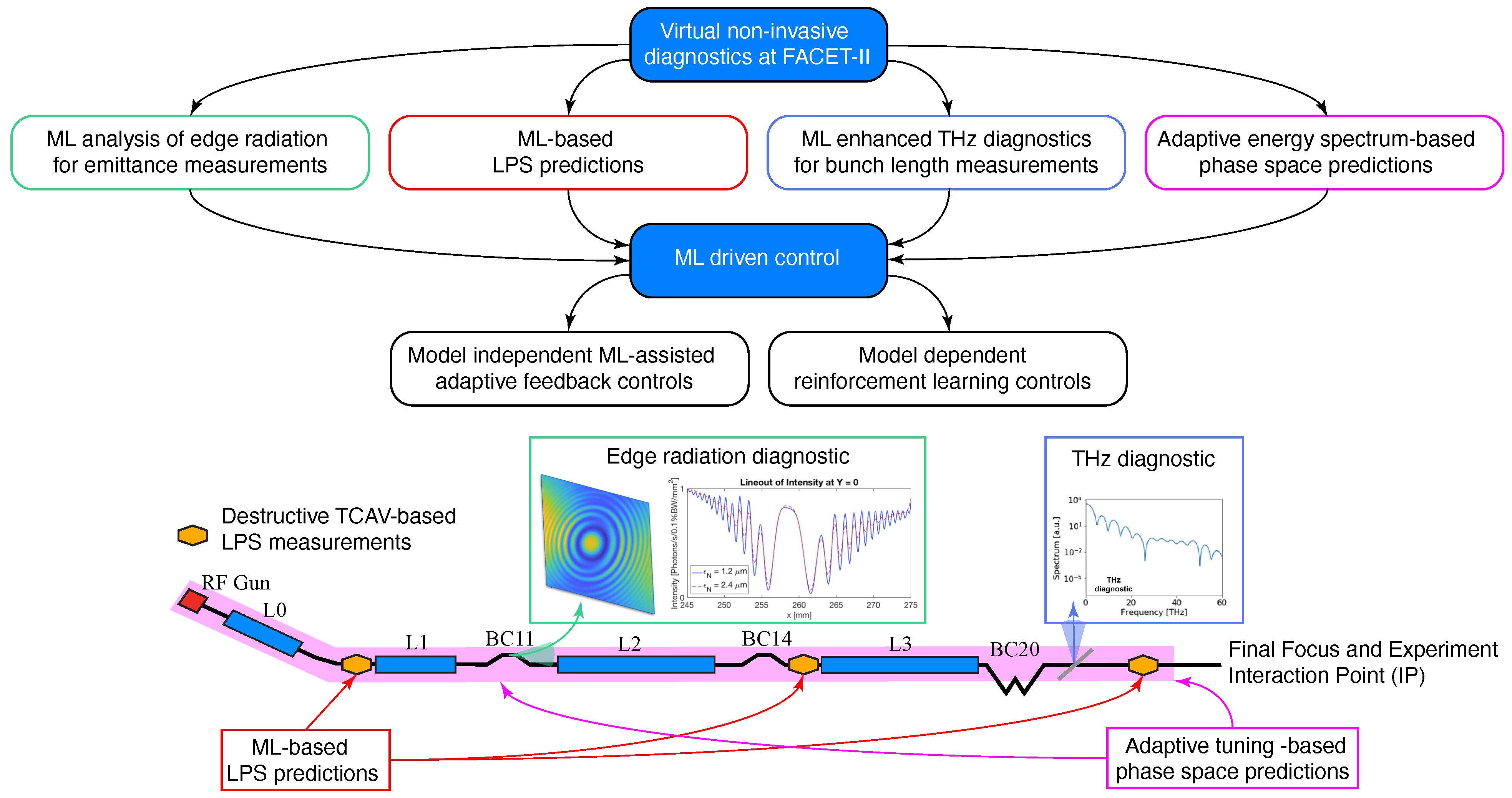
2.1. ML-Enhanced Diagnostics
2.2. ML-Enhanced Control
3. Results
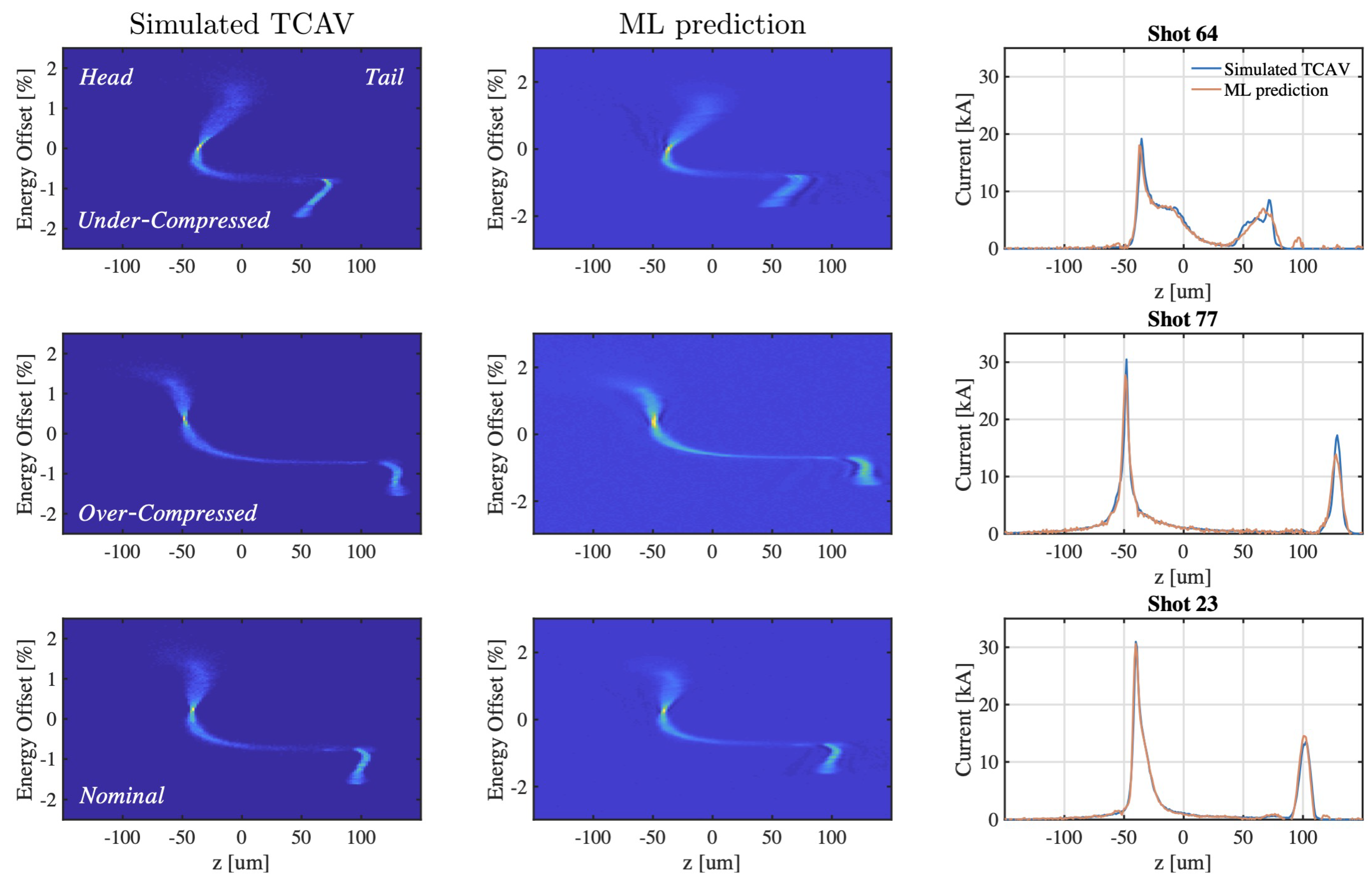
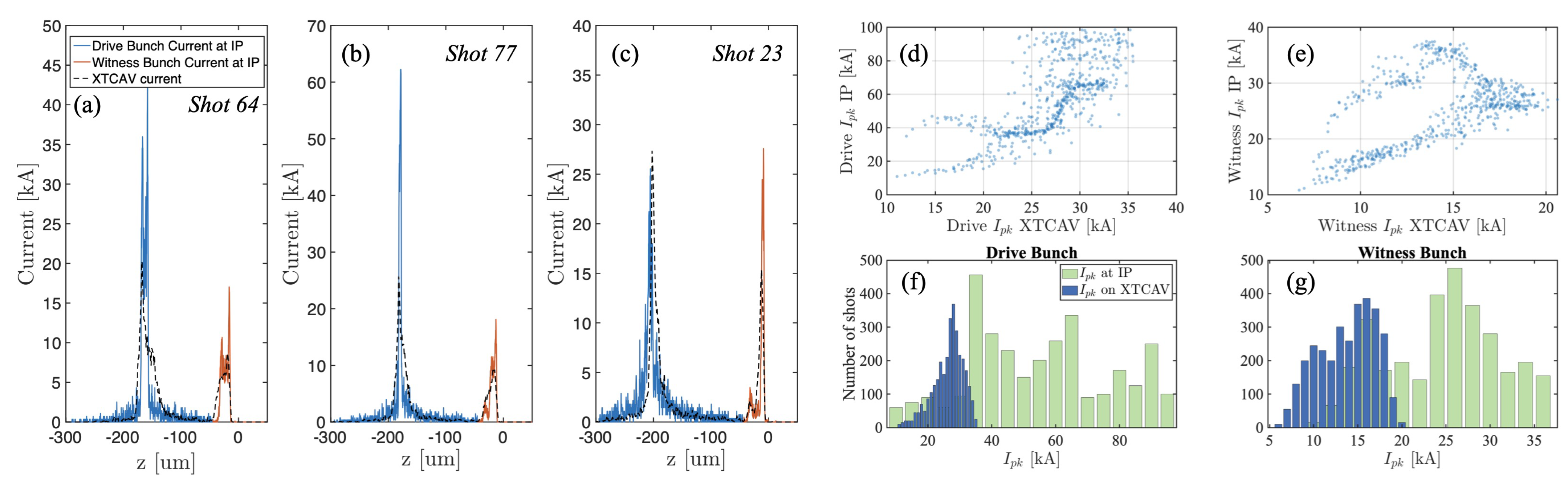
3.1. Longitudinal Phase Space Reconstruction
3.2. Spectral Virtual Diagnostics
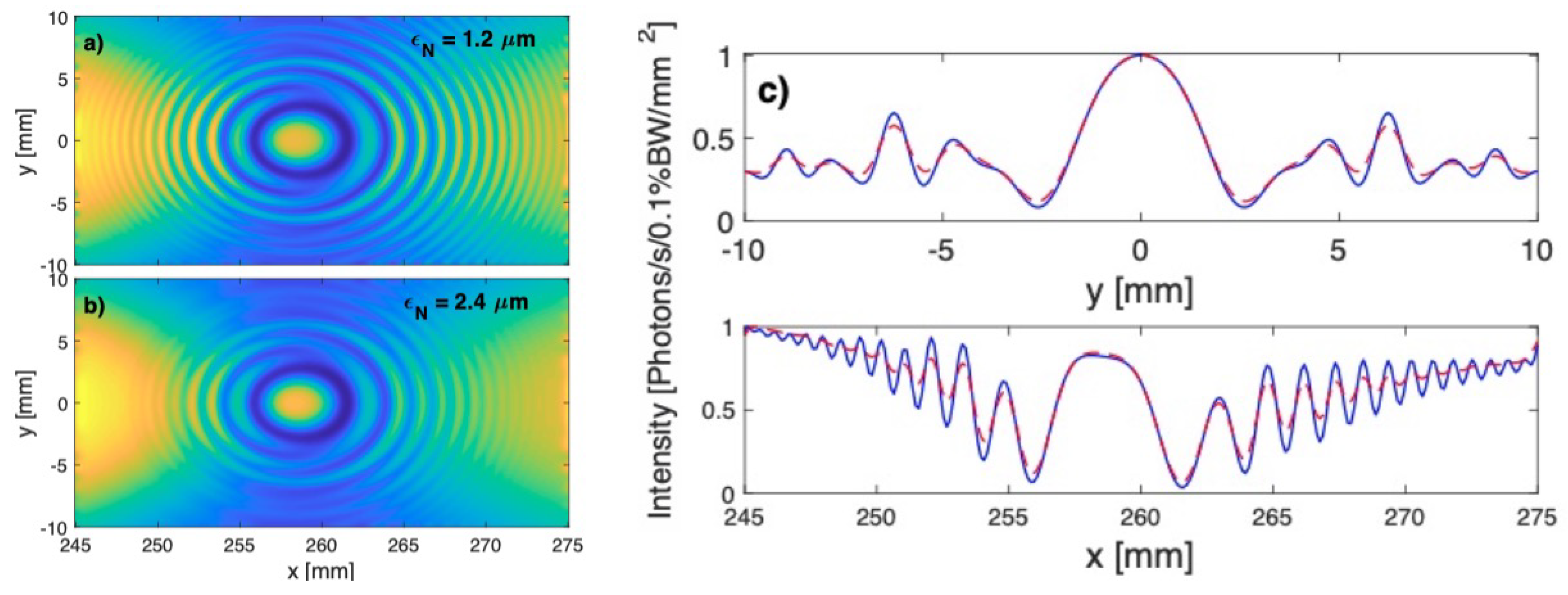
3.3. Emittance Reconstruction Using Edge Radiation
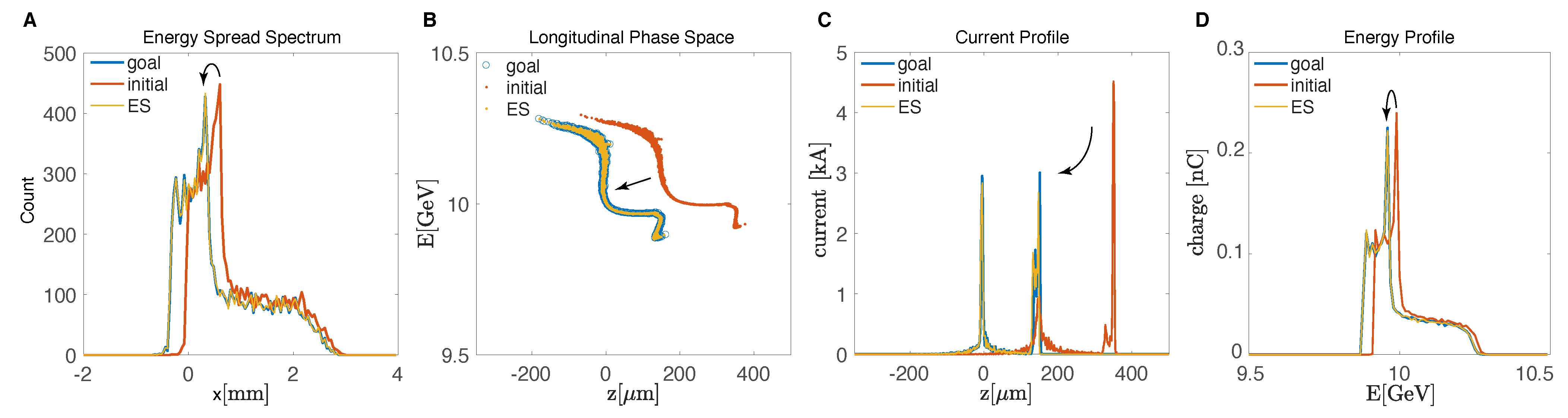
3.4. Adaptive Feedback with ML for Virtual 6D Diagnostics and Control
3.5. Reinforcement Learning Controls
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ML | Machine Learning |
| TCAV | Transverse Deflecting Cavity |
| LPS | Longitudinal Phase Space |
| IP | Interaction Point |
| SVD | Spectral Virtual Diagnostic |
| PWFA | Plasma Wakefield Accelerator |
| FEL | Free Electron Laser |
| CNN | Convolutional Neural Network |
References
- Yakimenko, V.; Alsberg, L.; Bong, E.; Bouchard, G.; Clarke, C.; Emma, C.; Green, S.; Hast, C.; Hogan, M.J.; Seabury, J.; et al. FACET-II facility for advanced accelerator experimental tests. Phys. Rev. Accel. Beams 2019, 22, 101301. [Google Scholar] [CrossRef] [Green Version]
- Joshi, C.; Adli, E.; An, W.; Clayton, C.E.; Corde, S.; Gessner, S.; Hogan, M.J.; Litos, M.; Lu, W.; Marsh, K.A.; et al. Plasma wakefield acceleration experiments at FACET II. Plasma Phys. Control. Fusion 2018, 60, 034001. [Google Scholar] [CrossRef]
- Emma, C.; Edelen, A.; Hogan, M.J.; O’Shea, B.; White, G.; Yakimenko, V. Machine learning-based longitudinal phase space prediction of particle accelerators. Phys. Rev. Accel. Beams 2018, 21, 112802. [Google Scholar] [CrossRef] [Green Version]
- Tenenbaum, P. Lucretia: A Matlab-based toolbox for the modeling and simulation of single pass electron beam transport systems. In Proceedings of the Particle Accelerator Conference, Knoxville, TN, USA, 16–20 May 2005; pp. 4197–4199. [Google Scholar]
- Sagan, D. Bmad: A relativistic charged particle simulation library. Nucl. Instrum. Meth. 2006, A558, 356–359. [Google Scholar] [CrossRef]
- Borland, M. Elegant: A Flexible SDDS-Compliant Code for Accelerator Simulation. In Proceedings of the 6th International Computational Accelerator Physics Conference (ICAP 2000), Darmstadt, Germany, 11–14 September 2000. [Google Scholar] [CrossRef] [Green Version]
- De Loos, M.J.; Van der Geer, S.B. General Particle Tracer: A New 3D Code for Accelerator and Beamline Design. In Proceedings of the 5th European Particle Accelerator Conference, Sitges, Spain, 10–14 June 1996. [Google Scholar]
- Technical Design Report for the FACET-II Project at SLAC National Accelerator Laboratory. Available online: https://www.osti.gov/biblio/1340171-technical-design-report-facet-ii-project-slac-national-accelerator-laboratory (accessed on 29 January 2021).
- Scheinker, A.; Edelen, A.; Bohler, D.; Emma, C.; Lutman, A. Demonstration of model-independent control of the longitudinal phase space of electron beams in the Linac-coherent light source with Femtosecond resolution. Phys. Rev. Lett. 2018, 121, 044801. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scheinker, A. Simultaneous stabilization and optimization of unknown, time-varying systems. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 2637–2642. [Google Scholar] [CrossRef]
- Scheinker, A.; Gessner, S. Adaptive method for electron bunch profile prediction. Phys. Rev. Spec. Top. Accel. Beams 2015, 18, 102801. [Google Scholar] [CrossRef] [Green Version]
- Scheinker, A.; Hirlaender, S.; Velotti, F.M.; Gessner, S.; Della Porta, G.Z.; Kain, V.; Goddard, B.; Ramjiawan, R. Online multi-objective particle accelerator optimization of the AWAKE electron beam line for simultaneous emittance and orbit control. AIP Adv. 2020, 10, 055320. [Google Scholar] [CrossRef]
- Scheinker, A.; Gessner, S.; Emma, C.; Edelen, A.L. Adaptive model tuning studies for non-invasive diagnostics and feedback control of plasma wakefield acceleration at FACET-II. Nucl. Instrum. Methods Phys. Res. Sect. Accel. Spectrometers Detect. Assoc. Equip. 2020, 967, 163902. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Scheinker, A.; Scheinker, D. Extremum seeking for optimal control problems with unknown time-varying systems and unknown objective functions. Int. J. Adapt. Control. Signal Process. 2020. [Google Scholar] [CrossRef]
- Wu, J.; Huang, X.; Raubenheimer, T.; Scheinker, A. Recent On-Line Taper Optimization on LCLS. In Proceedings of the 38th International Free Electron Laser Conference, (FEL’17), Santa Fe, NM, USA, 20–25 August 2017; JACOW: Geneva, Switzerland, 2018; pp. 229–234. [Google Scholar]
- Bruchon, N.; Fenu, G.; Gaio, G.; Lonza, M.; O’Shea, F.H.; Pellegrino, F.A.; Salvato, E. Basic Reinforcement Learning Techniques to Control the Intensity of a Seeded Free-Electron Laser. Electronics 2020, 9, 781. [Google Scholar] [CrossRef]
- Edelen, A.; Cropp, E.; Emma, C.; Hanuka, A. Machine Learning-Based Tuning of the Round-to-Flat Beam Transform at the UCLA Pegasus Photoinjector, in preparation. Available online: https://www.preprints.org/manuscript/202101.0115/v1 (accessed on 29 January 2021).
- Hanuka, A.; Emma, C.; Maxwell, T.; Fisher, A.; Jacobson, B.; Hogan, M.J.; Huang, Z. Accurate and confident prediction of electron beam longitudinal properties using spectral virtual diagnostics. arXiv 2020, arXiv:2009.12835. [Google Scholar]
- Wesch, S.; Schmidt, B.; Behrens, C.; Delsim-Hashemi, H.; Schmüser, P. A multi-channel THz and infrared spectrometer for femtosecond electron bunch diagnostics by single-shot spectroscopy of coherent radiation. Nucl. Instrum. Methods Phys. Res. Sect. Accel. Spectrometers Detect. Assoc. Equip. 2011, 665, 40–47. [Google Scholar] [CrossRef] [Green Version]
- Maxwell, T.J.; Behrens, C.; Ding, Y.; Fisher, A.S.; Frisch, J.; Huang, Z.; Loos, H. Coherent-Radiation Spectroscopy of Few-Femtosecond Electron Bunches Using a Middle-Infrared Prism Spectrometer. Phys. Rev. Lett. 2013, 111, 184801. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Loos, H.; Borden, T.; Emma, P.; Frisch, J.; Wu, J. Relative bunch length monitor for the Linac Coherent Light Source (LCLS) Using Coherent Edge Radiation. In Proceedings of the 2007 IEEE Particle Accelerator Conference (PAC), Albuquerque, NM, USA, 25–29 June 2007. [Google Scholar]
- Chubar, O. Determining electron beam parameters from edge radiation measurement results on Siberia-1 storage ring. In Proceedings of the Particle Accelerator Conference, Dallas, TX, USA, 1–5 May 1995. [Google Scholar] [CrossRef] [Green Version]
- Fiorito, R.; Shkvarunets, A.; Castronovo, D.; Cornacchia, M.; Di Mitri, S.; Kishek, R.; Tschalaer, C.; Veronese, M. Noninvasive emittance and energy spread monitor using optical synchrotron radiation. Phys. Rev. ST Accel. Beams 2014, 17, 122803. [Google Scholar] [CrossRef] [Green Version]
- Chubar, O.; Elleaume, P. Accurate and efficient computation of synchrotron radiation in the near field region. In Proceedings of the 6th European Conference, EPAC’98, Stockholm, Sweden, 22–26 June 1998; p. 1177. [Google Scholar]
- Seeman, J.; Brunk, W.; Early, R.; Ross, M.; Tillmann, E.; Walz, D. SLC Energy Spectrum Monitor Using Synchrotron Radiation; Stanford Linear Accelerator Center: Menlo Park, CA, USA, 1986. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameter Scanned | Range | Nominal Value |
| L1 & L2 phase [deg] | ±0.25 | −20.75, −39.9 |
| L1 & L2 voltage | ±0.1% | 216.48 MV & 5.23 GV |
| Bunch Charge [%] | ±1 | 2 nC |
| Input to ML model | Accuracy | |
| L1 & L2 phase [deg] | ±0.25 | - |
| L1 & L2 voltage [%] | ±0.05 | - |
| at BC (11, 14, 20) [kA] | ±(0.25, 1,5) | - |
| Beam centroid BC (11, 14) [m] | N/A | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Emma, C.; Edelen, A.; Hanuka, A.; O’Shea, B.; Scheinker, A. Virtual Diagnostic Suite for Electron Beam Prediction and Control at FACET-II. Information 2021, 12, 61. https://doi.org/10.3390/info12020061
Emma C, Edelen A, Hanuka A, O’Shea B, Scheinker A. Virtual Diagnostic Suite for Electron Beam Prediction and Control at FACET-II. Information. 2021; 12(2):61. https://doi.org/10.3390/info12020061
Chicago/Turabian StyleEmma, Claudio, Auralee Edelen, Adi Hanuka, Brendan O’Shea, and Alexander Scheinker. 2021. "Virtual Diagnostic Suite for Electron Beam Prediction and Control at FACET-II" Information 12, no. 2: 61. https://doi.org/10.3390/info12020061
APA StyleEmma, C., Edelen, A., Hanuka, A., O’Shea, B., & Scheinker, A. (2021). Virtual Diagnostic Suite for Electron Beam Prediction and Control at FACET-II. Information, 12(2), 61. https://doi.org/10.3390/info12020061