
LED-Lidar Echo Denoising Based on Adaptive PSO-VMD


Abstract
:1. Introduction
2. Theory
2.1. VMD
- (a)
- Initializing , , and setting ;
- (b)
- Updating and iteratively by Equations (3) and (4), respectively:
- (c)
- Updating according to Equation (5):
- (d)
- Repeating steps (b)–(c) until the iteration result is satisfied the ending condition:where is the discriminant accuracy, and .
- (e)
- Outputting K modal components.
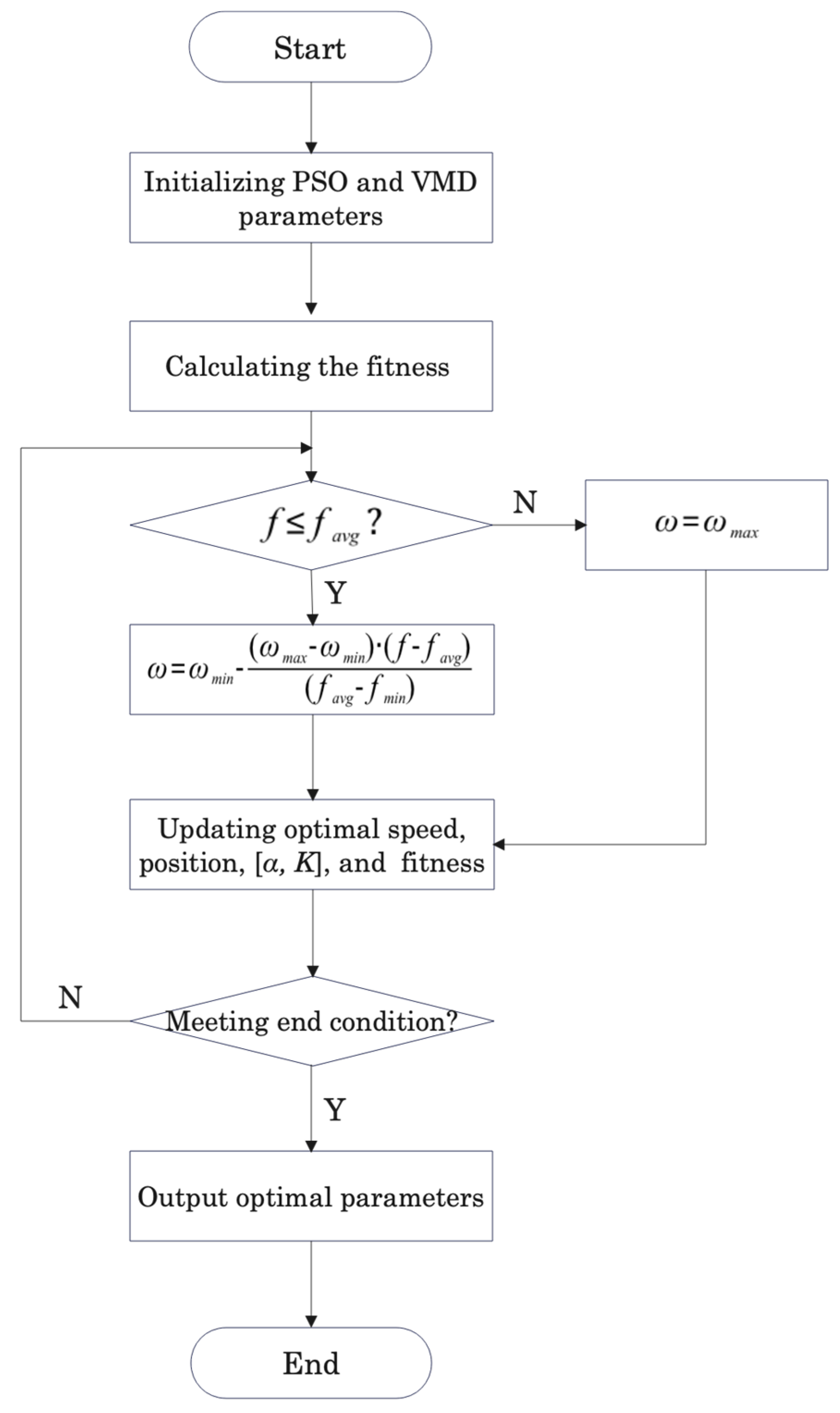
2.2. PSO
- (a)
- Parameter initialization: the main parameters are the population size, the maximum number of iterations, and the search range of the parameters α and K.
- (b)
- Updating iteratively: using the minimum of envelope entropy as the fitness function and updating the velocity and position of the population iteratively.
- (c)
- Determining the adaptive nonlinear dynamic inertial weight ω according to the most calculated current envelope entropy and the mean value of envelope entropy.
- (d)
- Update the new optimal [α, K] and the minimum envelope entropy if the new calculated envelope entropy is smaller than the minimum of the envelope entropy.
- (e)
- Repeat steps (b)–(d) until the maximum number of iterations as well as the minimum envelope entropy is determined; output the optimal parameters α and K.
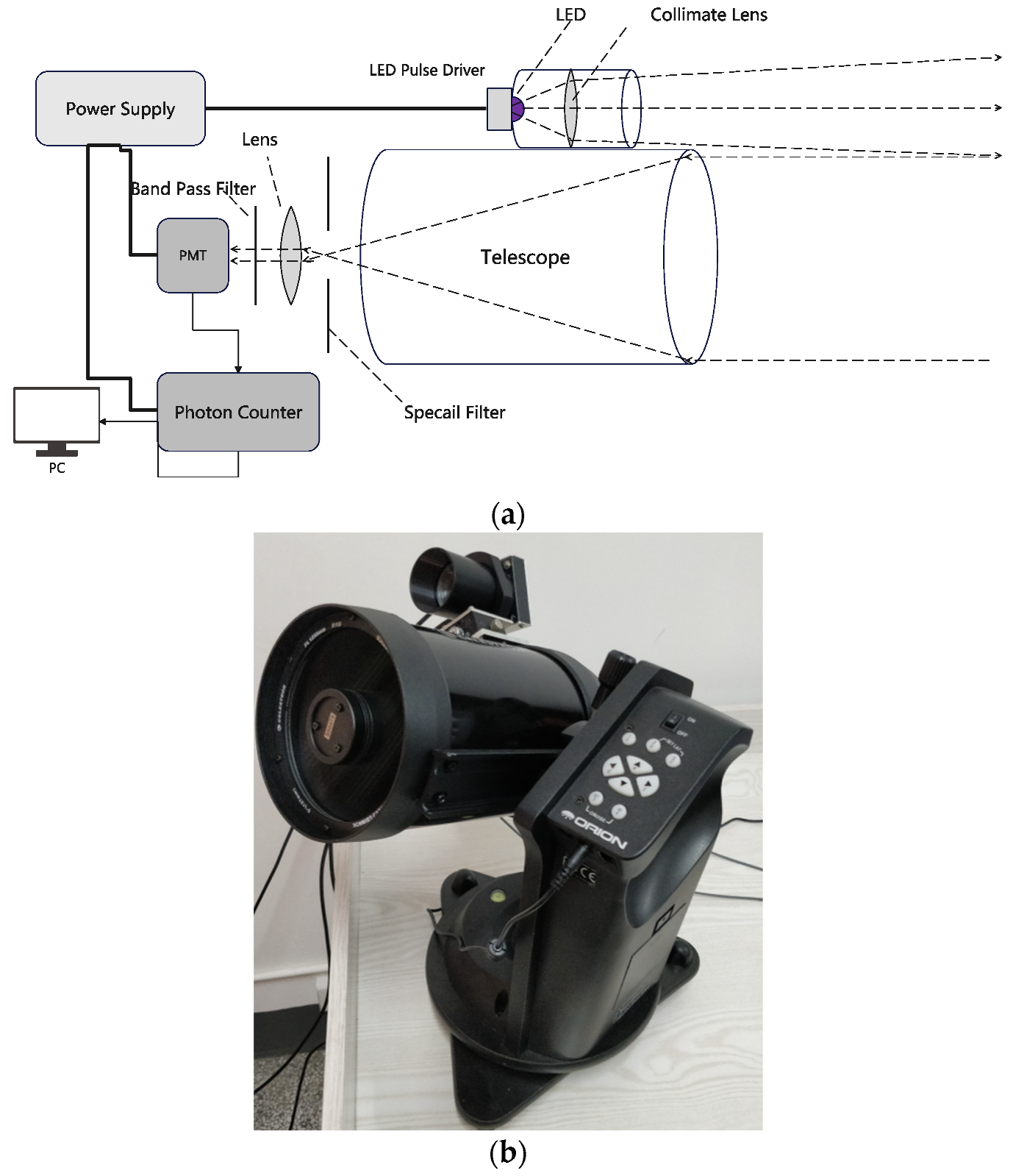
3. LED-Lidar System and Signal Processing
3.1. LED-Lidar System
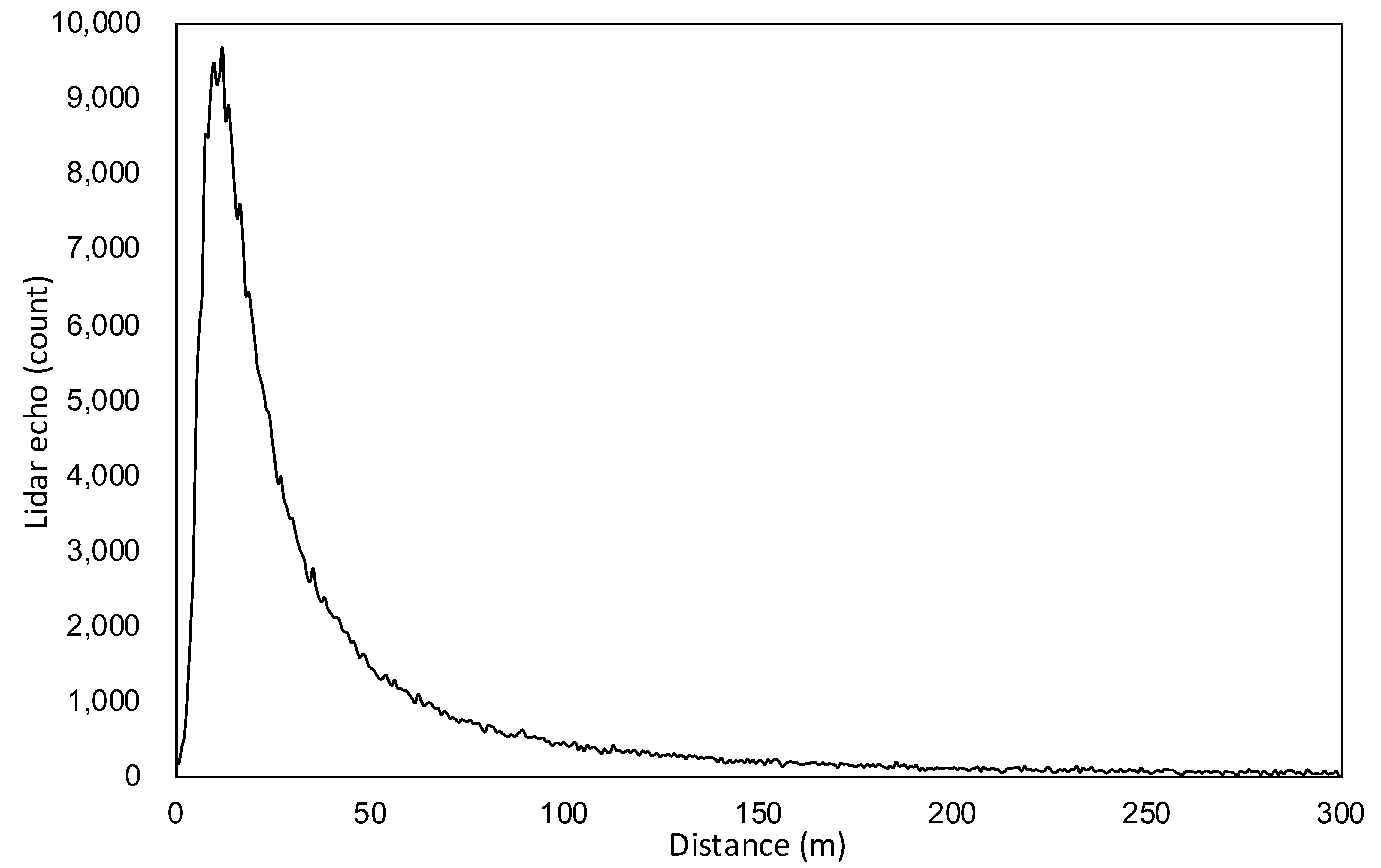
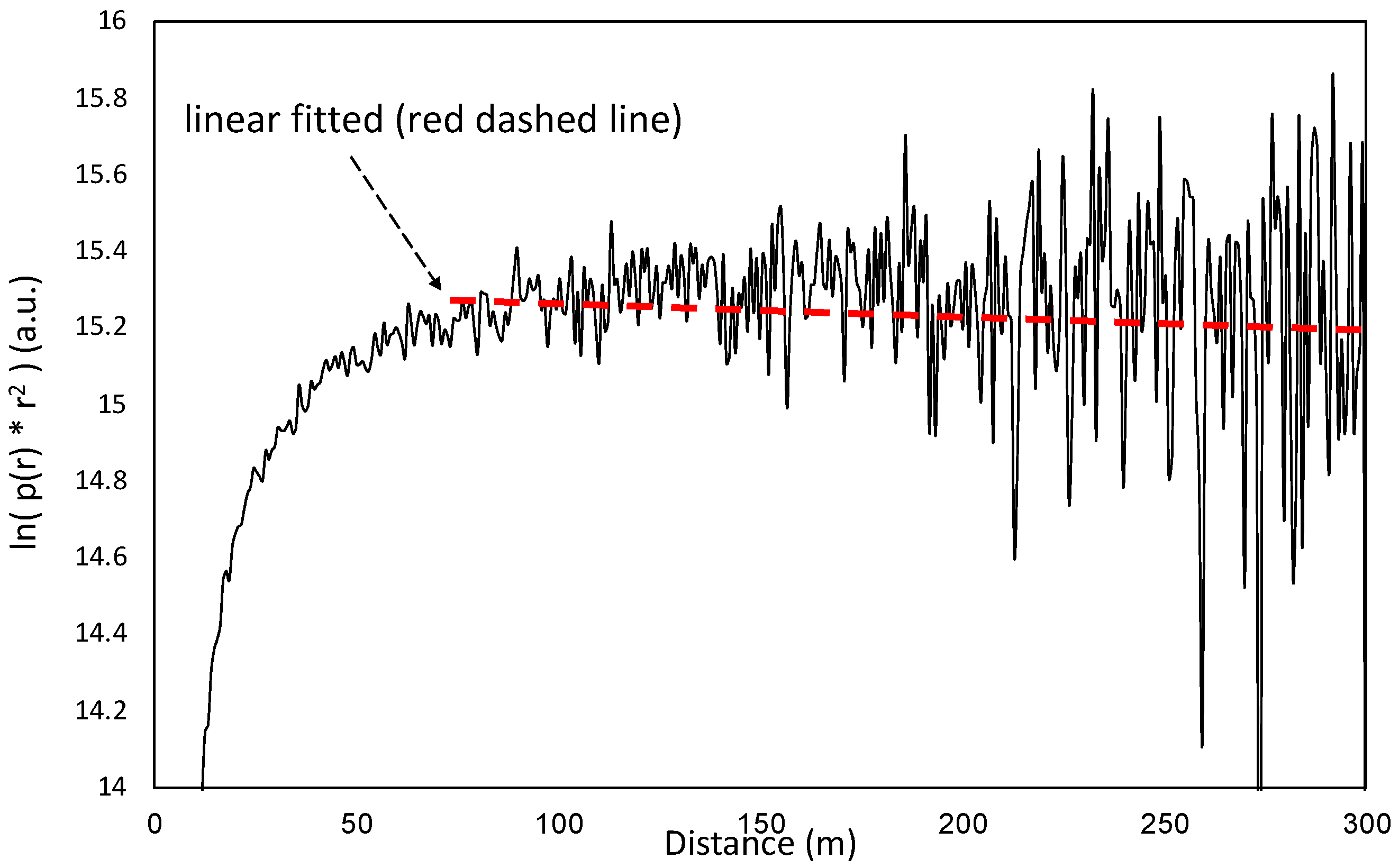
3.2. Lidar Echo Signal and Signal Processing
- (a)
- Carrying out the product operation of r2 for both sides of the lidar equation.
- (b)
- Taking the natural logarithm for both sides of the equation.
- (c)
- Taking the derivative of r for both sides of the equation.
4. Result
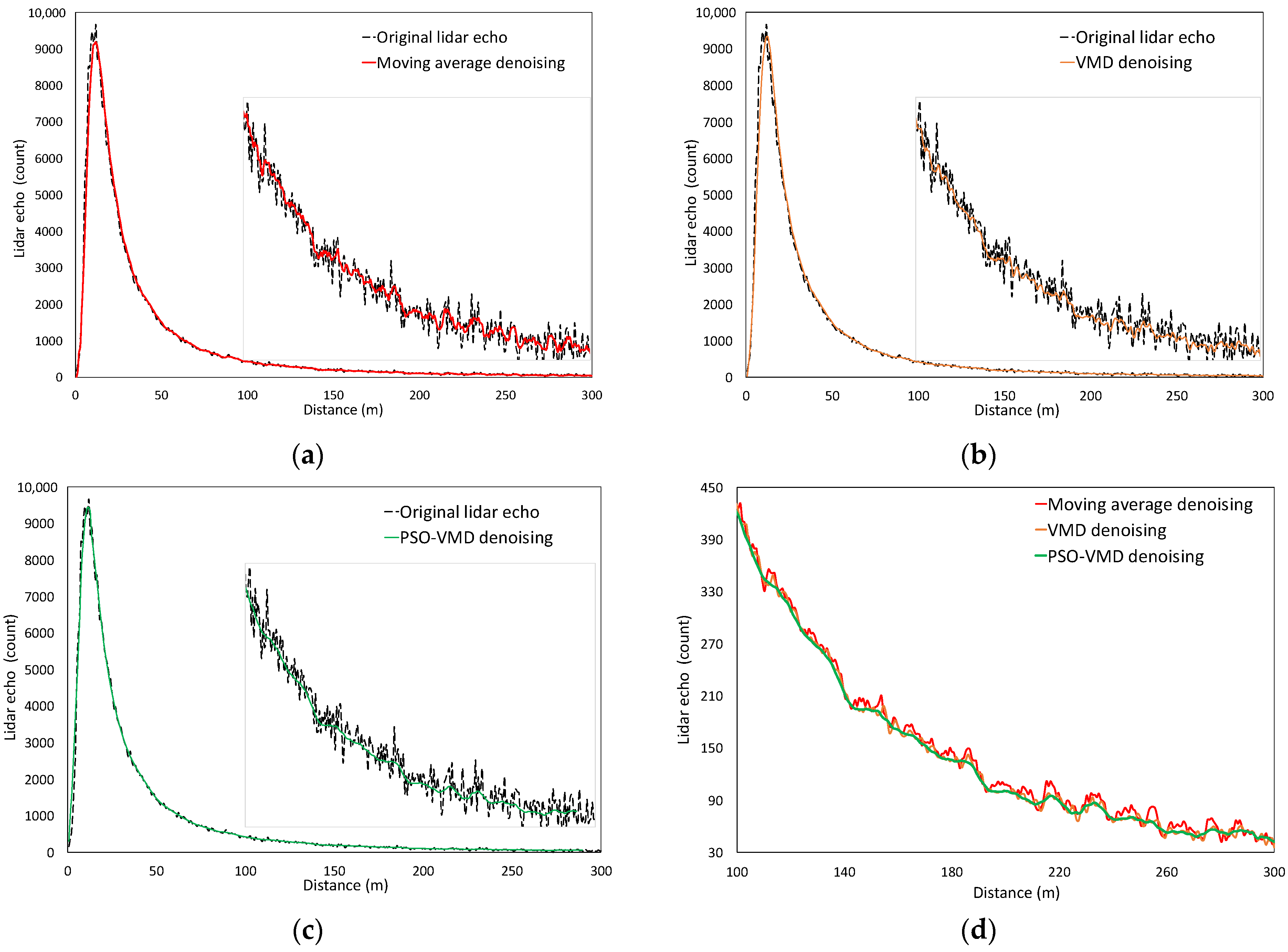
4.1. Denoising of LED-Lidar Echo
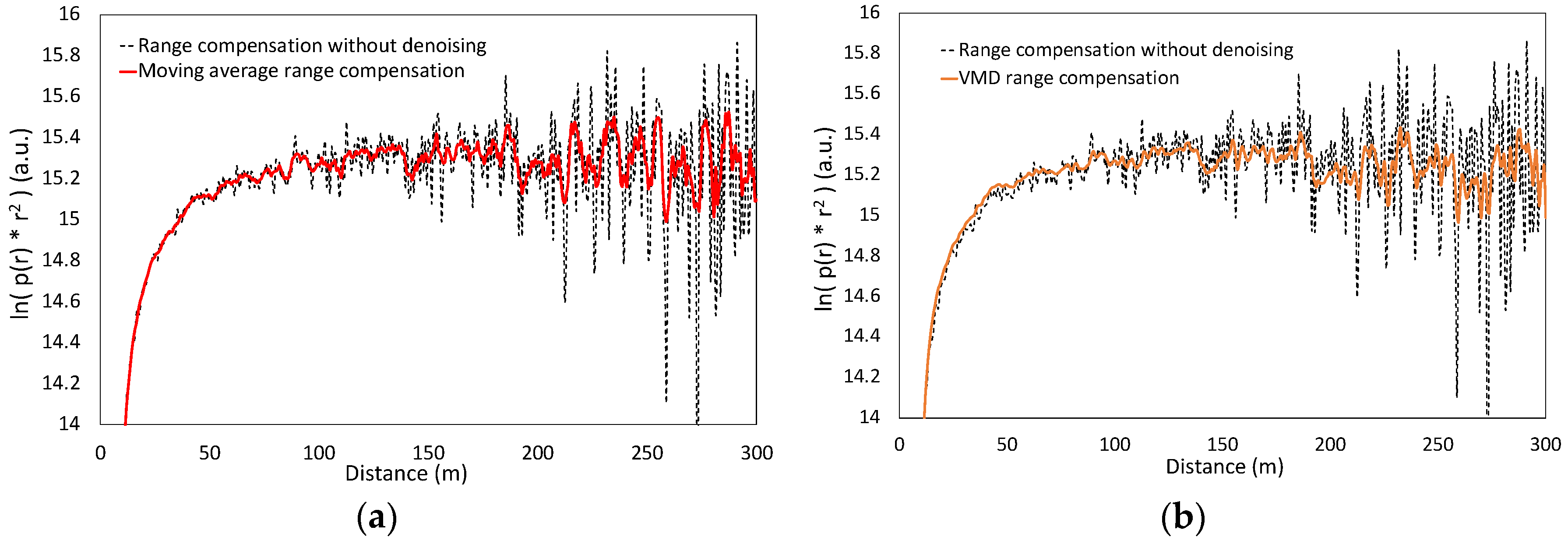
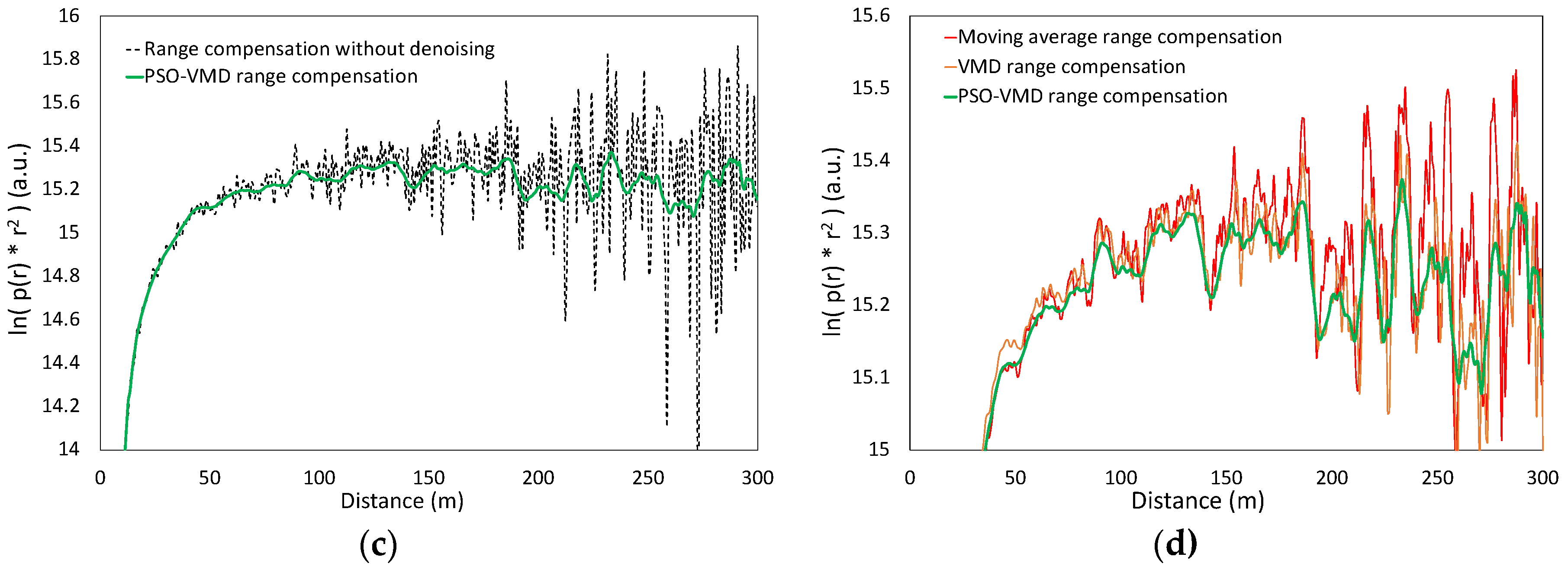
4.2. Range Compensation
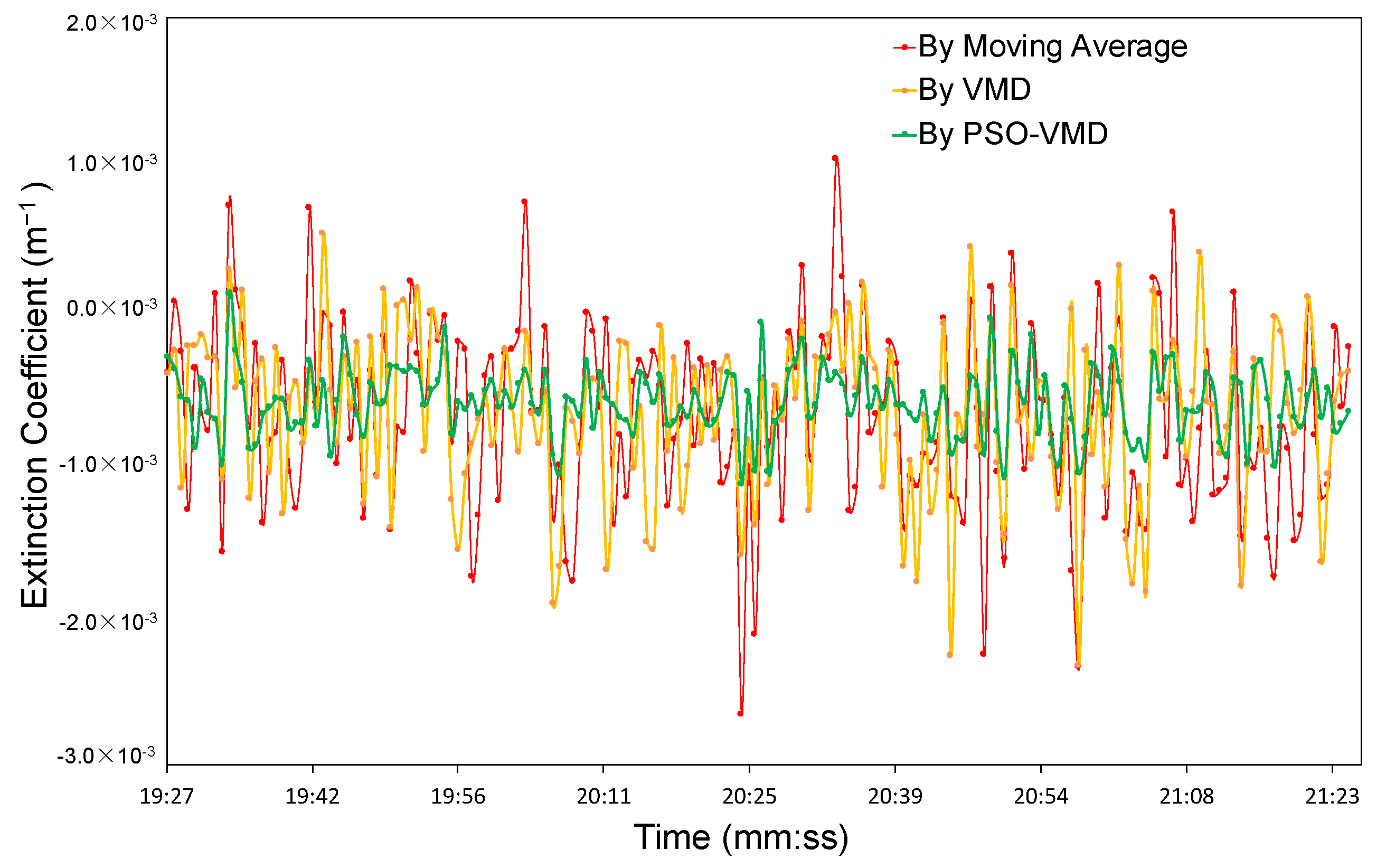
4.3. Extinction Coefficient
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of lidar in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef] [Green Version]
- Qiu, J.; Lu, D. On lidar application for remote sensing of the atmosphere. Adv. Atmos. Sci. 1991, 8, 369–378. [Google Scholar]
- Thayer, J.P. Rayleigh lidar system for middle atmosphere research in the arctic. Opt. Eng. 1997, 36, 2045–2061. [Google Scholar] [CrossRef]
- Carswell, A.I.; Pal, S.R.; Steinbrecht, W.; Whiteway, J.A.; Ulitsky, A.; Wang, T.Y. Lidar measurements of the middle atmosphere. Can. J. Phys. 1991, 69, 1076–1086. [Google Scholar] [CrossRef]
- Nishizawa, T.; Jin, Y.; Sugimoto, N.; Sato, K.; Okamoto, H. Observation of clouds, aerosols, and precipitation by multiple-field-of-view multiple-scattering polarization lidar at 355 nm. J. Quant. Spectrosc. Radiat. Transf. 2021, 271, 107710. [Google Scholar] [CrossRef]
- Ninomiya, H.; Yaeshima, S.; Ichikawa, K.; Fukuchi, T. Raman lidar system for hydrogen gas detection. Opt. Eng. 2007, 46, 094301. [Google Scholar] [CrossRef]
- Choi, I.Y.; Baik, S.H.; Cha, J.H.; Kim, J.H. Hydrogen gas concentration measurement method using the raman lidar system. Meas. Sci. Technol. 2019, 30, 055201. [Google Scholar] [CrossRef]
- Zeyn, J.; Lahmann, W.; Weitkamp, C. Remote daytime measurements of tropospheric temperature profiles with a rotational raman lidar. Opt. Lett. 1996, 21, 1301–1303. [Google Scholar] [CrossRef]
- Chust, G.; Galparsoro, I.; Ángel, B.; Franco, J.; Uriarte, A. Coastal and estuarine habitat mapping, using lidar height and intensity and multi-spectral imagery. Estuar. Coast. Shelf Sci. 2008, 78, 633–643. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppa, J.; Jaakkola, A. Mini-uav-borne lidar for fine-scale mapping. IEEE Geosci. Remote Sens. Lett. 2011, 8, 426–430. [Google Scholar] [CrossRef]
- Fisher, C.T.; Cohen, A.S.; Fernández-Diaz, J.C.; Leisz, S.J. The application of airborne mapping lidar for the documentation of ancient cities and regions in tropical regions. Quatern. Int. 2017, 448, 129–138. [Google Scholar] [CrossRef]
- Koyama, M.; Shiina, T. Light source module for led mini-lidar. Rev. Laser Eng. 2011, 39, 617–621. [Google Scholar] [CrossRef] [Green Version]
- Shiina, T. LED mini lidar for atmospheric application. Sensors 2019, 19, 569. [Google Scholar] [CrossRef] [Green Version]
- Rocadenbosch, F.; Soriano, C.; Comerón, A.; Baldasano, J.M. Lidar inversion of atmospheric backscatter and extinction-to-backscatter ratios by use of a Kalman filter. Appl. Opt. 1999, 38, 3175–3189. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Hua, D.; Wang, Y.; Yan, Q.; Li, S.; Yan, L.; Wang, H. Improvement of the signal to noise ratio of Lidar echo signal based on wavelet de-noising technique. Opt. Laser Eng. 2013, 51, 961–966. [Google Scholar] [CrossRef]
- Yang, G.; Liu, Y.; Wang, Y.; Zhu, Z. EMD interval thresholding denoising based on similarity measure to select relevant modes. Signal Process. 2015, 109, 95–109. [Google Scholar] [CrossRef]
- Yan, S.; Yang, G.; Li, Q.; Wang, C. Waveform centroid discrimination of pulsed Lidar by combining EMD and intensity weighted method under low SNR conditions. Infrared Phys. Technol. 2020, 109, 103385. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.; Tang, J. Noise suppression for magnetotelluric using variational mode decomposition and detrended fluctuation analysis. J. Appl. Geophys. 2020, 180, 104127. [Google Scholar] [CrossRef]
- Liu, Z.; Chang, J.; Li, H.; Chen, S. Signal denoising method combined with variational mode decomposition, machine learning online optimization and the interval thresholding technique. IEEE Access 2020, 8, 223482–223494. [Google Scholar] [CrossRef]
- Diao, X.; Jiang, J.; Shen, G.; Chi, Z.; Wang, Z.; Ni, L.; Mebarki, A.; Bian, H.; Hao, Y. An improved variational mode decomposition method based on particle swarm optimization for leak detection of liquid pipelines. Mech. Syst. Signal Pract. 2020, 143, 106787. [Google Scholar] [CrossRef]
- Garg, H. A hybrid PSO-GA algorithm for constrained optimization problems. Appl. Math. Comput. 2016, 274, 292–305. [Google Scholar] [CrossRef]
- Behnam, M.; Pourghassem, H. Spectral correlation power-based seizure detection using statistical multi-level dimensionality reduction and PSO-PNN optimization algorithm. IETE J. Res. 2017, 63, 736–753. [Google Scholar] [CrossRef]
- Eloranta, E.E. High Spectral Resolution Lidar. In Springer Series in Optical Sciences; Georgia Institute of Technology: Atlanta, GA, USA, 2005; Volume 102, pp. 143–163. [Google Scholar]
- Kunz, G.J.; Leeuw, G. Inversion of lidar signals with the slope method. Appl. Opt. 1993, 32, 3249–3256. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Denoising Method | R-Square | RMSE |
|---|---|---|
| Original echo | 0.9421 | 24.0928 |
| Moving average | 0.9902 | 9.7450 |
| VMD | 0.9945 | 7.3588 |
| PSO-VMD | 0.9972 | 5.7369 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, Z.; Bai, H.; Shiina, T.; Deng, J.; Liu, B.; Zhang, X. LED-Lidar Echo Denoising Based on Adaptive PSO-VMD. Information 2022, 13, 558. https://doi.org/10.3390/info13120558
Peng Z, Bai H, Shiina T, Deng J, Liu B, Zhang X. LED-Lidar Echo Denoising Based on Adaptive PSO-VMD. Information. 2022; 13(12):558. https://doi.org/10.3390/info13120558
Chicago/Turabian StylePeng, Ziqi, Hongzi Bai, Tatsuo Shiina, Jianglong Deng, Bei Liu, and Xian Zhang. 2022. "LED-Lidar Echo Denoising Based on Adaptive PSO-VMD" Information 13, no. 12: 558. https://doi.org/10.3390/info13120558