

HIL Flight Simulator for VTOL-UAV Pilot Training Using X-Plane



Abstract
:1. Introduction
2. Related Works
3. Contributions
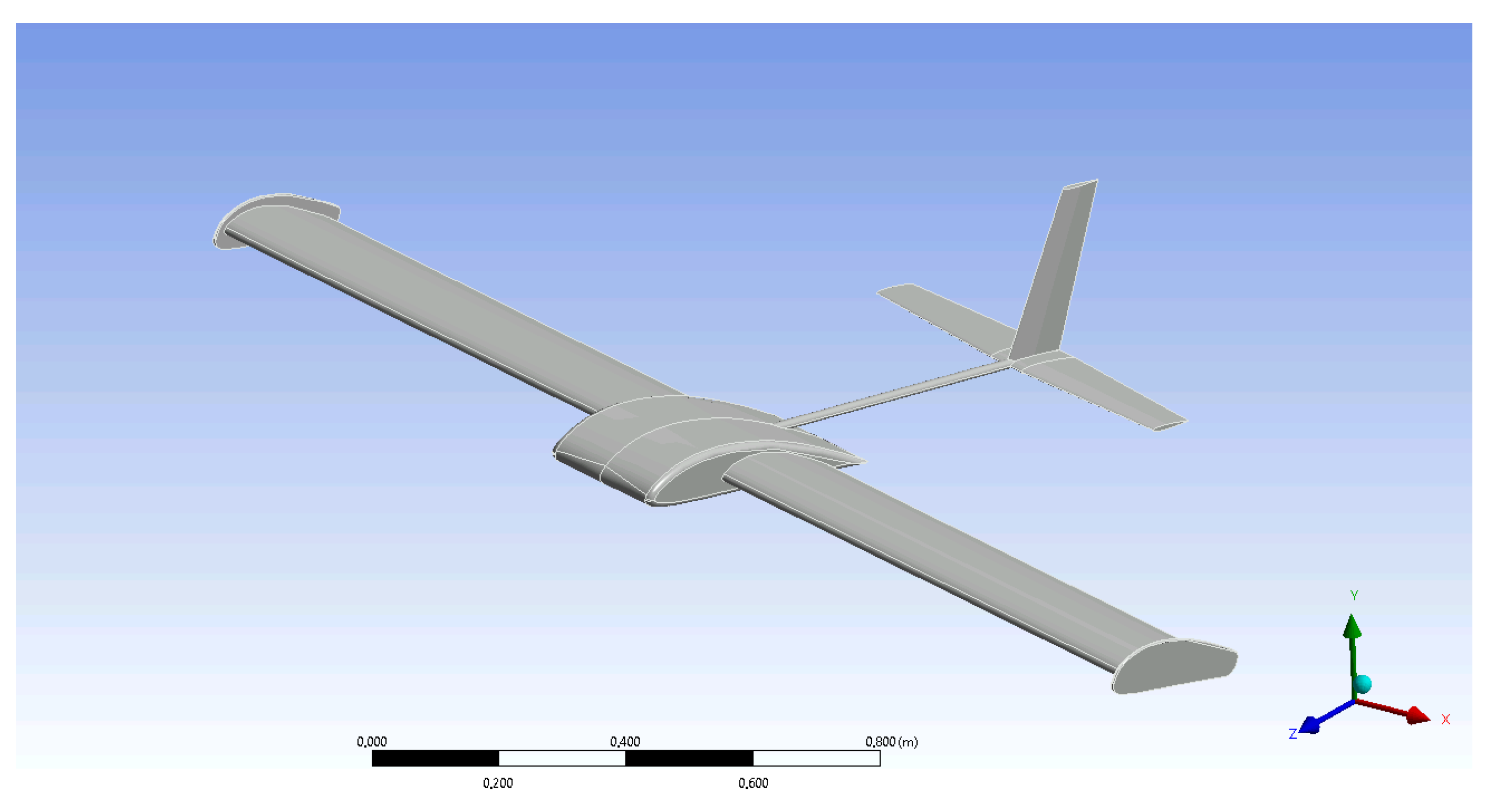
4. UAV-VTOL Modeling
- Wing and endplates.
- Fuselage (considering the airfoil shape).
- Engines and propellers.
- Connecting engine arms (carbon fiber rods) and tilt mechanism.
- Tail: vertical tail plane (VTP), horizontal tail plane (HTP), and the connecting carbon fiber rod.
- Basic landing gear.
4.1. Mass, Inertia, and Geometric Data
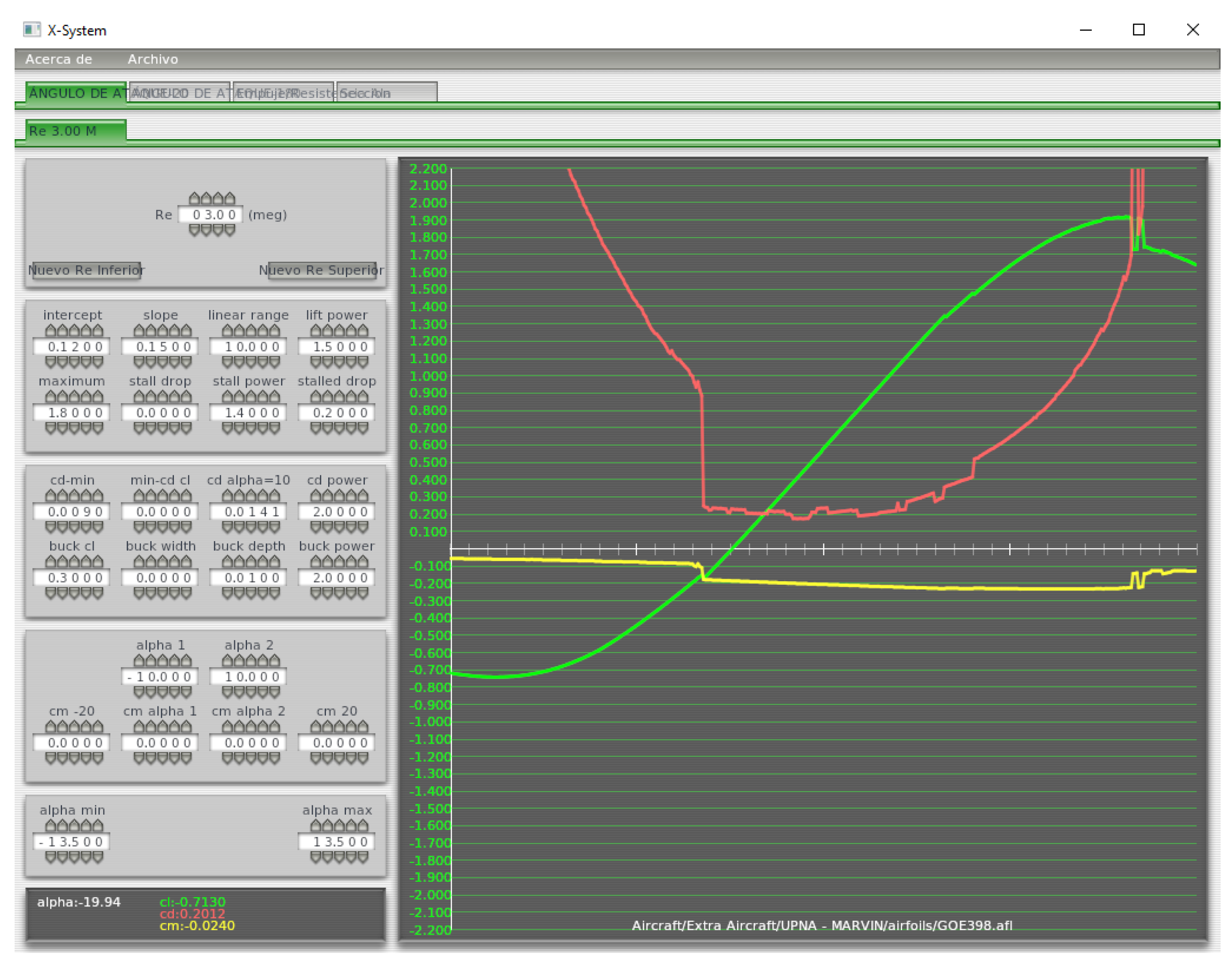
4.2. Aerodynamic Specifications
Control Surfaces
4.3. Engines and Propellers
4.4. Operational Specifications
- Typical cruise speed (m/s).
- Stall speed (m/s).
- Transition speed from copter to plane mode (m/s).
- Maximum speed (m/s).
- Minimum turn radius (m) or standard rate of turn (degrees per second).
5. Commercial Flight Simulator Integration
HIL Flight Controller Integration
6. Live Weather Conditions, Wind, and Ground Effect Plugins
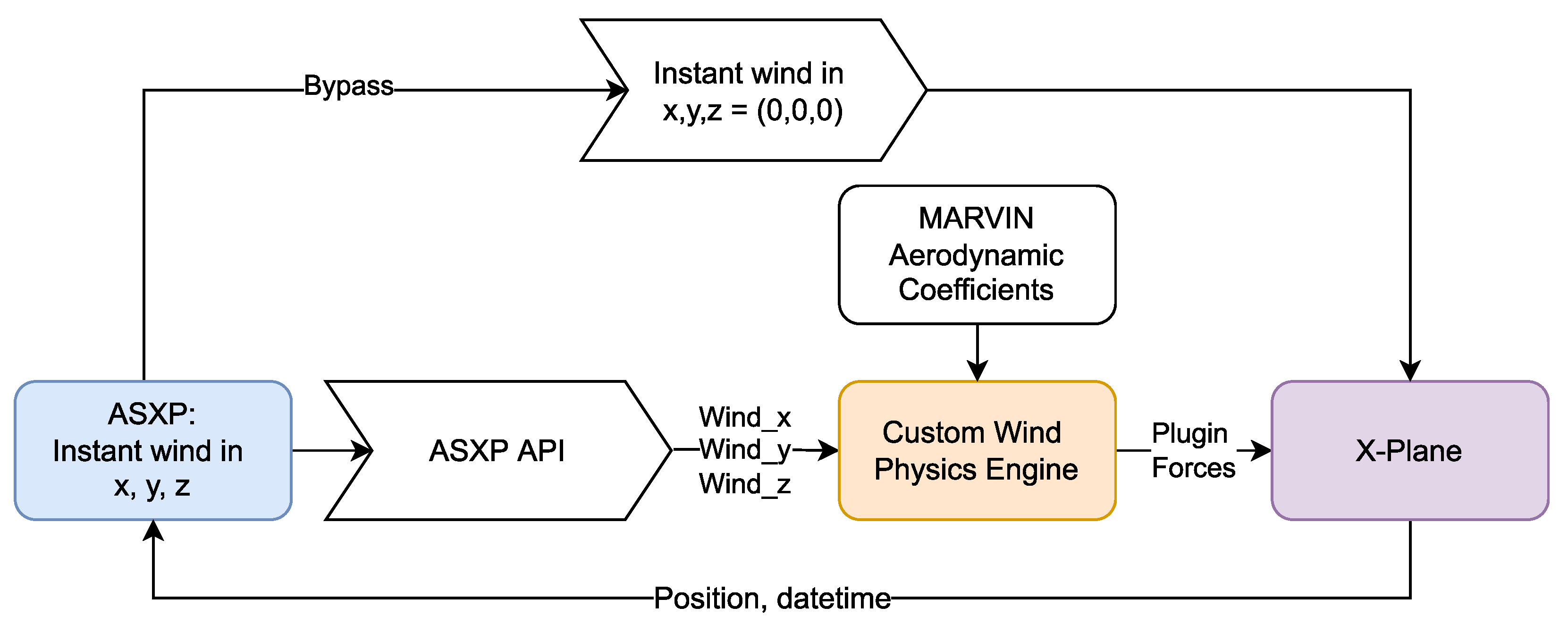
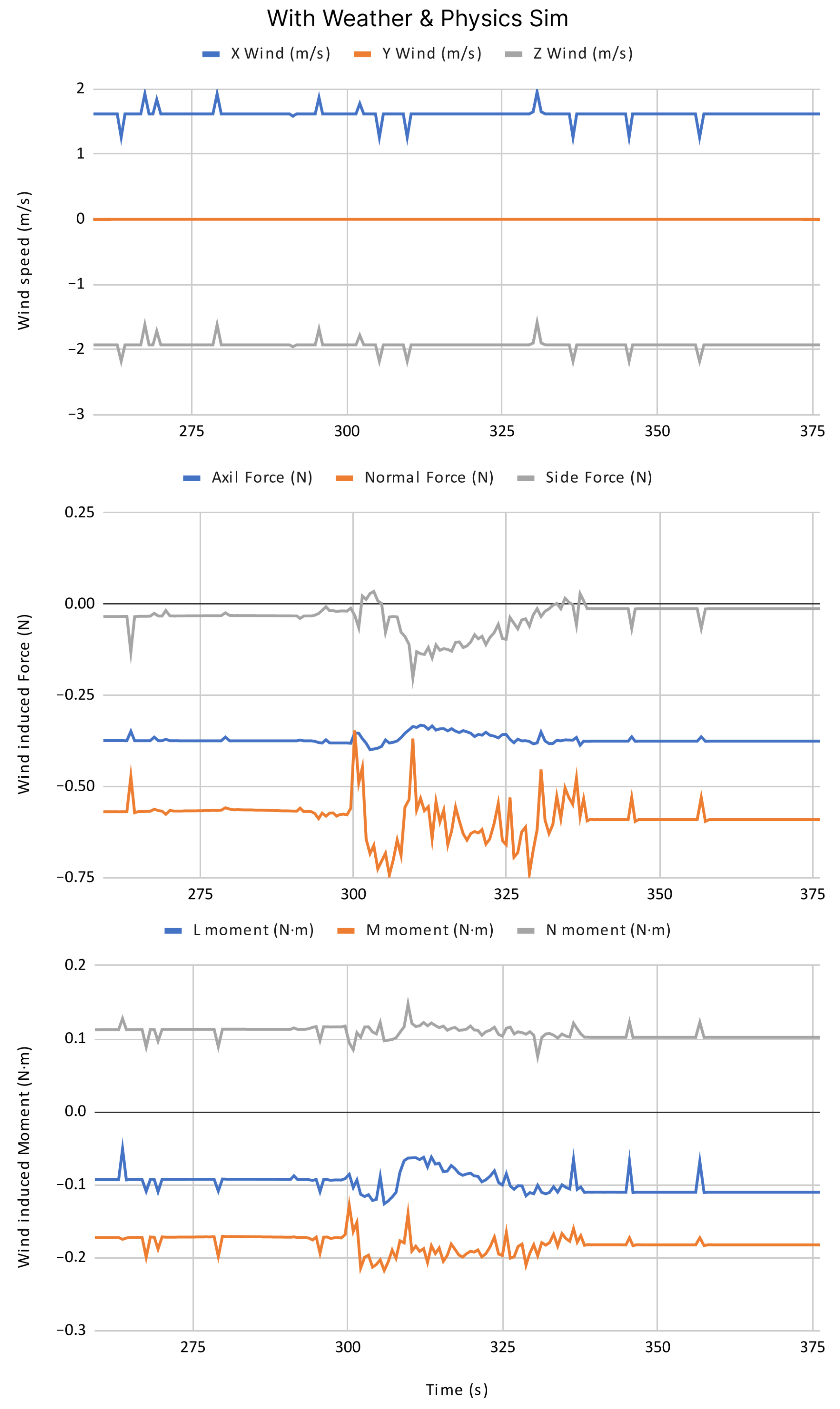
6.1. Wind Forces and Moments Calculation
- The x axis is aligned east–west with positive X pointing east.
- The y axis is aligned straight up from the ground plane.
- The z axis is aligned north–south with positive Z pointing south.
- Positive x axis points to the nose of the aircraft.
- Positive y axis points to the right wing.
- Positive z axis points to the bottom perpendicularly to the x and y axes.
6.2. Live Weather Conditions
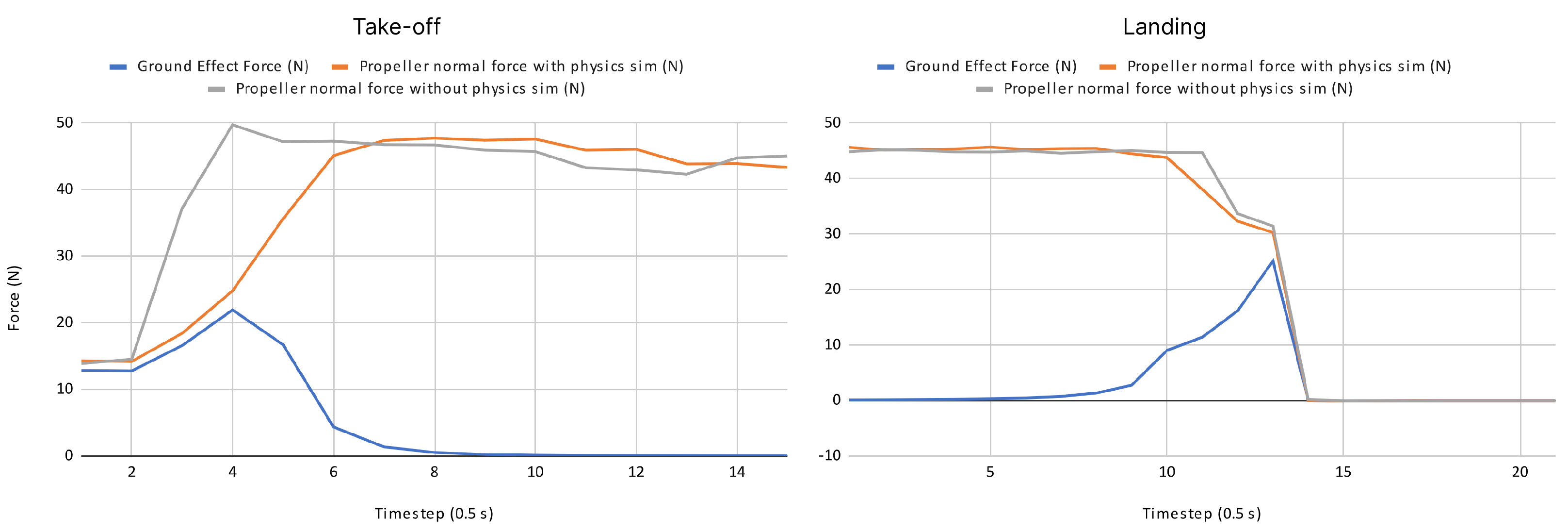
6.3. Ground Effect Simulation
6.4. Instructor Station and Failure Simulation
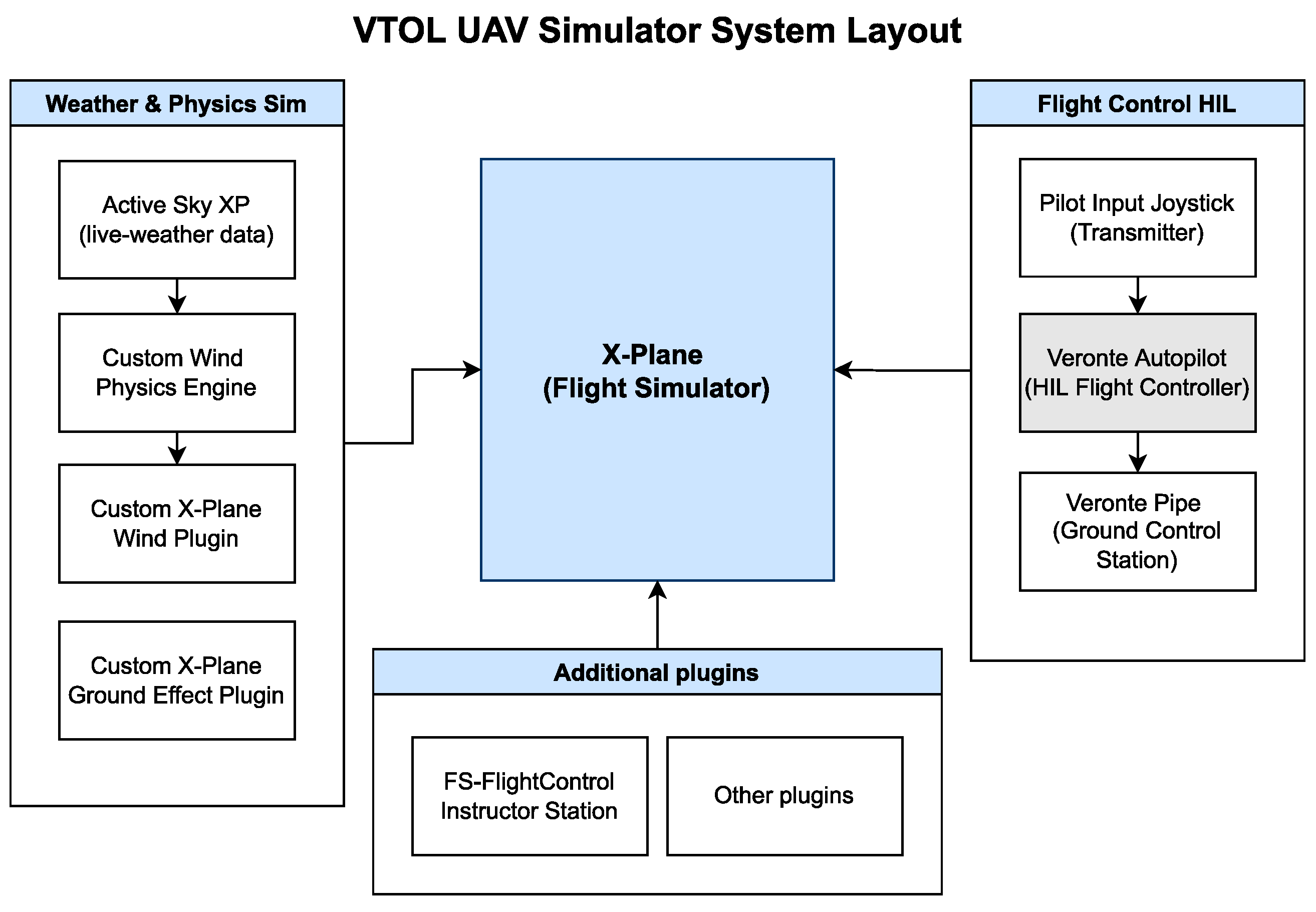
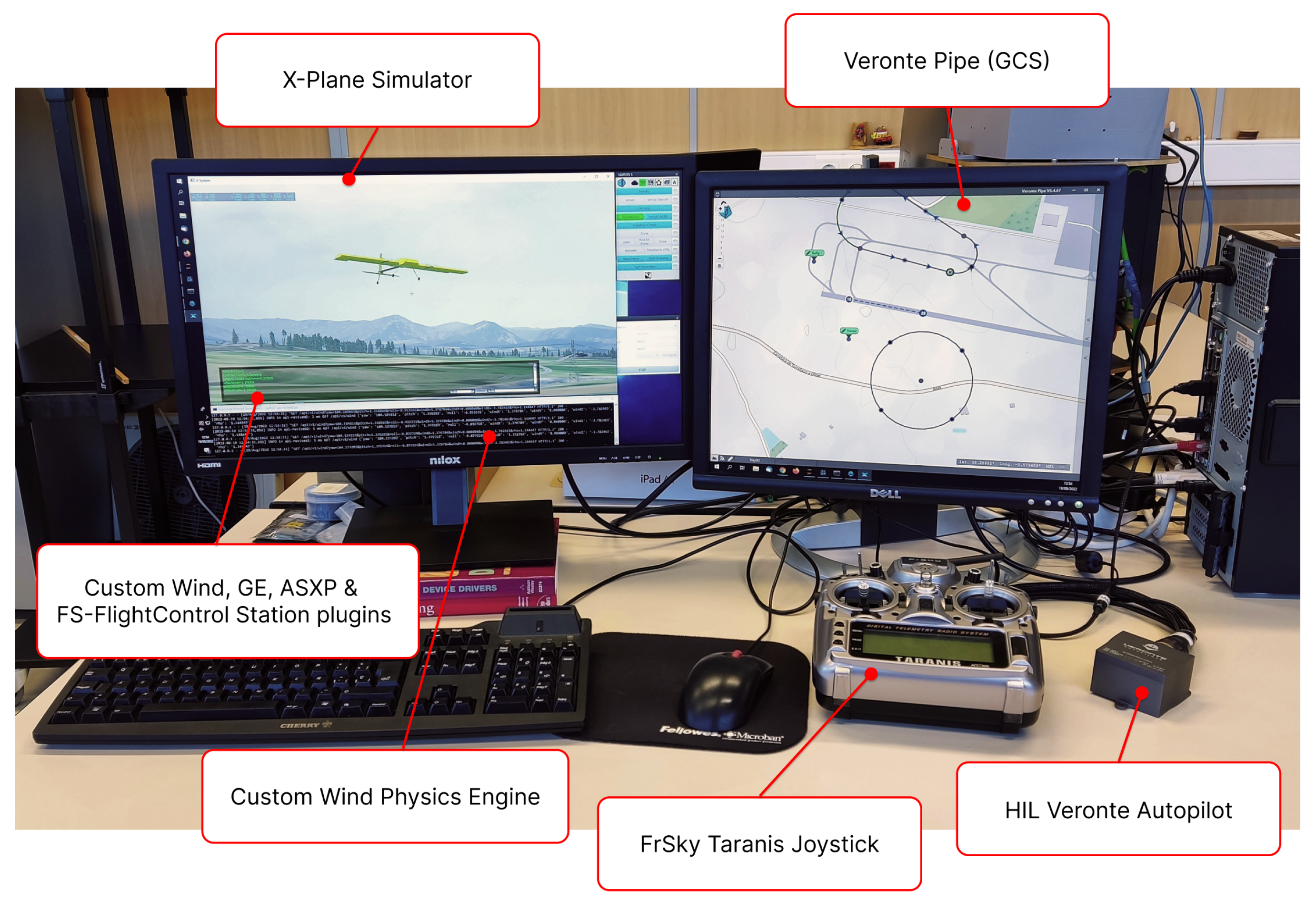
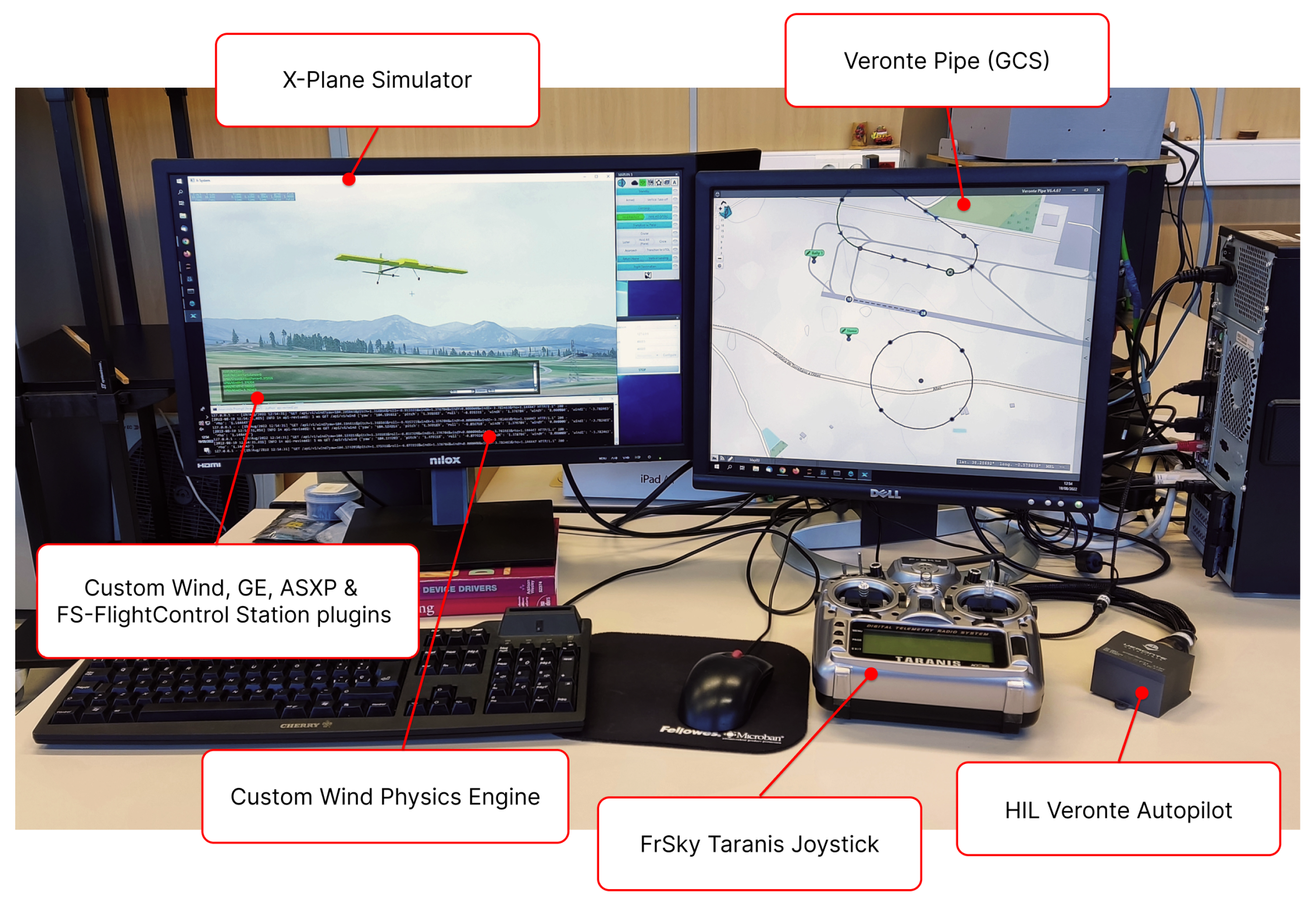
7. Materials and Methods
- Weather and Physics simulator: including the Active Sky XP plugin, our custom wind physics engine and X-Plane plugin, and our custom ground effect plugin.
- Flight Control HIL: including the ground control station software and the Veronte Autopilot.
- Additional plugins, such as the Instructor Operation Station.
- Wind speed: 5 knots.
- Wind direction: Variable from 270 to 030 degrees.
- Temperature: 8 degrees Celsius.
- Mean air density: 1.201 kg/m.
- Take-off coordinates: 424645 N, 13910 W.
- Initial yaw: 250. The aircraft nose is facing southwest.
8. Results and Discussion
- The X axis is aligned east–west with positive X meaning east.
- The Y axis is aligned straight up and down with positive Y pointing down.
- The Z axis is aligned north–south with positive Z pointing north.
9. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ko, A.; Ohanian, O.; Gelhausen, P. Ducted fan UAV modeling and simulation in preliminary design. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6375. [Google Scholar]
- Tekinalp, O.; Unlu, T.; Yavrucuk, I. Simulation and flight control of a tilt duct uav. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Chicago, IL, USA, 10–13 August 2009; p. 6138. [Google Scholar]
- Cao, J.; Anvar, A.M. Design, modelling and simulation of maritime uav-vtol flight dynamics. In Applied Mechanics and Materials; Trans Tech Publications: Cham, Switzerland, 2012; Volume 152, pp. 1533–1538. [Google Scholar]
- Muraoka, K.; Okada, N.; Kubo, D.; Sato, M. Transition flight of quad tilt wing VTOL UAV. In Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012. [Google Scholar]
- Ke, Y.; Chen, B.M. Full envelope dynamics modeling and simulation for tail-sitter hybrid UAVs. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 2242–2247. [Google Scholar] [CrossRef]
- Lyu, X.; Gu, H.; Zhou, J.; Li, Z.; Shen, S.; Zhang, F. Simulation and flight experiments of a quadrotor tail-sitter vertical take-off and landing unmanned aerial vehicle with wide flight envelope. Int. J. Micro Air Veh. 2018, 10, 303–317. [Google Scholar] [CrossRef] [Green Version]
- Walid, M.; Slaheddine, N.; Mohamed, A.; Lamjed, B. Modeling and control of a quadrotor UAV. In Proceedings of the 2014 15th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Hammamet, Tunisia, 21–23 December 2014; pp. 343–348. [Google Scholar] [CrossRef]
- Lyu, X.; Gu, H.; Wang, Y.; Li, Z.; Shen, S.; Zhang, F. Design and implementation of a quadrotor tail-sitter VTOL UAV. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3924–3930. [Google Scholar] [CrossRef]
- Oosedo, A.; Konno, A.; Matsumoto, T.; Go, K.; Masuko, K.; Uchiyama, M. Design and attitude control of a quad-rotor tail-sitter vertical takeoff and landing unmanned aerial vehicle. Adv. Robot. 2012, 26, 307–326. [Google Scholar] [CrossRef]
- Carlson, S.J.; Papachristos, C. The MiniHawk-VTOL: Design, Modeling, and Experiments of a Rapidly-prototyped Tiltrotor UAV. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 777–786. [Google Scholar] [CrossRef]
- ERSOY, E.; YALÇIN, M.K. Designing autopilot system for fixed-wing flight mode of a tilt-rotor UAV in a virtual environment: X-Plane. Int. Adv. Res. Eng. J. 2018, 2, 33–42. [Google Scholar]
- Yu, L.; He, G.; Zhao, S.; Wang, X.; Shen, L. Design and implementation of a hardware-in-the-loop simulation system for a tilt trirotor UAV. J. Adv. Transp. 2020, 2020, 4305742. [Google Scholar] [CrossRef]
- D’Urso, F.; Santoro, C.; Santoro, F.F. Integrating Heterogeneous Tools for Physical Simulation of multi-Unmanned Aerial Vehicles. In Proceedings of the WOA, Palermo, Italy, 28–29 June 2018; pp. 10–15. [Google Scholar]
- Vuruskan, A.; Yuksek, B.; Ozdemir, U.; Yukselen, A.; Inalhan, G. Dynamic modeling of a fixed-wing VTOL UAV. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 483–491. [Google Scholar] [CrossRef]
- Caro, P.W. Aircraft simulators and pilot training. Hum. Factors 1973, 15, 502–509. [Google Scholar] [CrossRef]
- McLean, G.M.; Lambeth, S.; Mavin, T. The use of simulation in ab initio pilot training. Int. J. Aviat. Psychol. 2016, 26, 36–45. [Google Scholar] [CrossRef]
- Gu, H.; Wu, D.; Liu, H. Development of a novel low-cost flight simulator for pilot training. Int. J. Comput. Syst. Eng. 2009, 3, 1581–1585. [Google Scholar]
- Dahlstrom, N.; Dekker, S.; van Winsen, R.; Nyce, J. Fidelity and validity of simulator training. In Simulation in Aviation Training; Routledge: London, UK, 2017; pp. 135–144. [Google Scholar]
- Craighead, J.; Murphy, R.; Burke, J.; Goldiez, B. A Survey of Commercial & Open Source Unmanned Vehicle Simulators. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 852–857. [Google Scholar] [CrossRef]
- Bittar, A.; Figuereido, H.V.; Guimaraes, P.A.; Mendes, A.C. Guidance Software-In-the-Loop simulation using X-Plane and Simulink for UAVs. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 993–1002. [Google Scholar] [CrossRef]
- Nguyen, K.D.; Ha, C.; Jang, J.T. Development of a new hybrid drone and software-in-the-loop simulation using px4 code. In Proceedings of the International Conference on Intelligent Computing, Wuhan, China, 15–18 August 2018; Springer: Cham, Switzerland, 2018; pp. 84–93. [Google Scholar]
- Ganoni, O.; Mukundan, R. A framework for visually realistic multi-robot simulation in natural environment. arXiv 2017, arXiv:1708.01938. [Google Scholar]
- Soltani, A.; Assadian, F. A Hardware-in-the-Loop Facility for Integrated Vehicle Dynamics Control System Design and Validation. In Proceedings of the 7th IFAC Symposium on Mechatronic Systems MECHATRONICS 2016, Loughborough, UK, 5–8 September 2016; IFAC-PapersOnLine. Volume 49, pp. 32–38. [Google Scholar] [CrossRef]
- Nicolescu, G.; Mosterman, P.J. Model-Based Design for Embedded Systems; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Gausemeier, J.; Moehringer, S. VDI 2206- A New Guideline for the Design of Mechatronic Systems. In Proceedings of the 2nd IFAC Conference on Mechatronic Systems, Berkeley, CA, USA, 9–11 December 2022; IFAC Proceedings Volumes. Volume 35, pp. 785–790. [Google Scholar] [CrossRef]
- MathWorks. Validation and Verification for System Development. 2022. Available online: https://mathworks.com/help/rtw/gs/v-model-for-system-development.html (accessed on 15 November 2022).
- Sun, J.; Li, B.; Wen, C.Y.; Chen, C.K. Design and implementation of a real-time hardware-in-the-loop testing platform for a dual-rotor tail-sitter unmanned aerial vehicle. Mechatronics 2018, 56, 1–15. [Google Scholar] [CrossRef]
- Garcia-Nieto, S.; Velasco-Carrau, J.; Paredes-Valles, F.; Salcedo, J.V.; Simarro, R. Motion equations and attitude control in the vertical flight of a VTOL bi-rotor UAV. Electronics 2019, 8, 208. [Google Scholar] [CrossRef] [Green Version]
- Astuti, G.; Longo, D.; Melita, C.; Muscato, G.; Orlando, A. HIL tuning of UAV for exploration of risky environments. Int. J. Adv. Robot. Syst. 2008, 5, 36. [Google Scholar] [CrossRef]
- Adiprawita, W.; Ahmad, A.S.; Semibiring, J. Hardware in the loop simulator in UAV rapid development life cycle. arXiv 2008, arXiv:0804.3874. [Google Scholar]
- Yoo, C.s.; Kang, Y.s.; Park, B.j. Hardware-In-the-Loop simulation test for actuator control system of Smart UAV. In Proceedings of the ICCAS 2010, Gyeonggi-do, Republic of Korea, 27–30 October 2010; pp. 1729–1732. [Google Scholar] [CrossRef]
- Drela, M. XFOIL: An analysis and design system for low Reynolds number airfoils. In Low Reynolds Number Aerodynamics; Springer: Berlin/Heidelberg, Germany, 1989; pp. 1–12. [Google Scholar]
- Tsien, H.S.; Lees, L. The Glauert-Prandtl approximation for subsonic flows of a compressible fluid. J. Aeronaut. Sci. 1945, 12, 173–187. [Google Scholar] [CrossRef]
- Selig, M.S. Real-time flight simulation of highly maneuverable unmanned aerial vehicles. J. Aircr. 2014, 51, 1705–1725. [Google Scholar] [CrossRef]
- Isermann, R.; Schaffnit, J.; Sinsel, S. Hardware-in-the-loop simulation for the design and testing of engine-control systems. Control. Eng. Pract. 1999, 7, 643–653. [Google Scholar] [CrossRef]
- Cole, J.S., Jr.; Jolly, A.C. Hardware-in-the-loop simulation at the US Army Missile Command. In Proceedings of the Technologies for Synthetic Environments: Hardware-in-the-Loop Testing, Orlando, FL, USA, 8–12 April 1996; Volume 2741, pp. 14–19. [Google Scholar]
- Sisle, M.E.; McCarthy, E.D. Hardware-in-the-loop simulation for an active missile. Simulation 1982, 39, 159–167. [Google Scholar] [CrossRef]
- Eguchi, H.; Yamashita, T. Benefits of HWIL simulation to develop guidance and control systems for missiles. In Proceedings of the Technologies for Synthetic Environments: Hardware-in-the-Loop Testing V, Orlando, FL, USA, 24–28 April 2000; Volume 4027, pp. 66–73. [Google Scholar]
- Autopiloto para Drone Veronte 1x–UAV Autopilots–Productos Veronte. 2022. Available online: https://www.embention.com/es/producto/autopiloto-simple/ (accessed on 20 September 2022).
- Aláez, D.; Olaz, X.; Prieto, M.; Villadangos, J.; Astrain, J. VTOL UAV digital twin for take-off, hovering and landing in different wind conditions. Simul. Model. Pract. Theory 2022, 102703. [Google Scholar] [CrossRef]
- Grinberg, M. Flask Web Development: Developing Web Applications with Python; O’Reilly Media, Inc.: Newton, MA, USA, 2018. [Google Scholar]
- D’Urso, F.; Santoro, C.; Santoro, F.F. Wale: A solution to share libraries in Docker containers. Future Gener. Comput. Syst. 2019, 100, 513–522. [Google Scholar] [CrossRef]
- Active Sky XP Home Page. Available online: https://hifisimtech.com/asxp/ (accessed on 14 September 2022).
- Aich, S.; Ahuja, C.; Gupta, T.; Arulmozhivarman, P. Analysis of ground effect on multi-rotors. In Proceedings of the 2014 International Conference on Electronics, Communication and Computational Engineering (ICECCE), Hosur, India, 17–18 November 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 236–241. [Google Scholar]
- Betz, A. The Ground Effect on Lifting Propellers; Technical Report TM 836; National Advisory Committee for Aeronautics: Washington, DC, USA, 1937. [Google Scholar]
- Knight, M.; Hegner, R.A. Analysis of Ground Effect on the Lifting Airscrew; Technical Report TN 835; National Advisory Committee for Aeronautics: Washington, DC, USA, 1941. [Google Scholar]
- Zbrozek, J. Ground Effect on the Lifting Rotor; Technical Report RM 2347; Aeronautical Research Council: London, UK, 1947. [Google Scholar]
- Cheeseman, I.; Bennett, W. The Effect of the Ground on a Helicopter Rotor in Forward Flight; Cranfield University: Bedford, UK, 1955. [Google Scholar]
- Fradenburgh, E.A. The helicopter and the ground effect machine. J. Am. Helicopter Soc. 1960, 5, 24–33. [Google Scholar] [CrossRef]
- Marr, R.; Ford, D.; Ferguson, S. Analysis of the Wind Tunnel Test of a Tilt Rotor Power Force Model; Technical Report NASA-CR-137529; National Aeronautics and Space Administration: Moffett Field, CA, USA, 1974. [Google Scholar]
- Hayden, J.S. The effect of the ground on helicopter hovering power required. In Proceedings of the AHS 32nd Annual Forum, Winnipeg, MB, Canada, 5 November 1976. [Google Scholar]
- Conrow, E.H. Estimating technology readiness level coefficients. J. Spacecr. Rocket. 2011, 48, 146–152. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Notes |
|---|---|---|
| Mass | m | Including common payloads. |
| Inertia tensor | , , , , , | |
| Center of gravity | ||
| Center of tilt | ||
| Motor position | Specify for each engine i. | |
| Front/rear motor plane offset | ||
| Wingspan | b | |
| Tail rod length | ||
| Landing gear height | ||
| Wing chord | Ctip only if tapered wing. | |
| Sweep angle, dihedral angle | ||
| Thickness | t | |
| Aerodynamic center | ||
| Wing position | Relative to the fuselage. | |
| 2D airfoil coefficient plots | vs | |
| Global aerodynamic coefficient plots | vs | For validation of the entire aircraft. |
| Control surfaces | HTP, VTP, ailerons | Same parameters as the wing. |
| Maximum and minimum deflection | For control surfaces. | |
| Motor performance: thrust, speed, current, voltage | vs pulse width | Tabular or plot data. |
| Typical cruise speed | ||
| Stall speed | ||
| Transition speed | Minimum speed to transition from copter to plane mode. | |
| Maximum speed | ||
| Minimum turn radius or standard rate of turn | , | |
| Tabular aerodynamic coefficients | For various roll, pitch, and yaw combinations. | |
| Propeller radius | R | Used for ground effect estimation. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aláez, D.; Olaz, X.; Prieto, M.; Porcellinis, P.; Villadangos, J. HIL Flight Simulator for VTOL-UAV Pilot Training Using X-Plane. Information 2022, 13, 585. https://doi.org/10.3390/info13120585
Aláez D, Olaz X, Prieto M, Porcellinis P, Villadangos J. HIL Flight Simulator for VTOL-UAV Pilot Training Using X-Plane. Information. 2022; 13(12):585. https://doi.org/10.3390/info13120585
Chicago/Turabian StyleAláez, Daniel, Xabier Olaz, Manuel Prieto, Pablo Porcellinis, and Jesús Villadangos. 2022. "HIL Flight Simulator for VTOL-UAV Pilot Training Using X-Plane" Information 13, no. 12: 585. https://doi.org/10.3390/info13120585
APA StyleAláez, D., Olaz, X., Prieto, M., Porcellinis, P., & Villadangos, J. (2022). HIL Flight Simulator for VTOL-UAV Pilot Training Using X-Plane. Information, 13(12), 585. https://doi.org/10.3390/info13120585