1. Introduction
With the development of parallel and distributed computer systems, the number of processors in an interconnection network is increasing at a great rate. The topology of a high-performance computer can be indicated by an undirected graph G, represented by , where we use to represent the processor set and to represent the link set.
As a significant performance indicator, connectivity is widely studied, and it is used to judge a network’s fault tolerance properties [
1]. In addition, some other connectivities with restrictions have been proposed, such as conditional connectivity [
2],
g-extra connectivity [
3],
h-restricted connectivity [
4,
5], and
-connectivity [
6]. Most works have only focused on the impact on the network when individual nodes fail. In an actual network environment, the vertices connected to a fault vertex are more prone to fail, which means that some network structures or substructures may fail. Based on this thought, Lin et al. [
7] considered the impact on the network from the perspective of structure failure and proposed two connectivities, which are called structure and substructure connectivity. These two connectivities can be used to evaluate a network’s fault tolerance properties. A network has good structure fault tolerance properties if its (sub)structure connectivity is high.
We use to express one of the subgraph sets in G. Here, each denotes a connected subgraph of G. F is called a subgraph cut of graph G if removing from G disconnects G or makes G trivial. If each is isomorphic to H(or a connected subgraph of H), where H denotes a connected subgraph of G, we say that F is an H-structure-cut (or H-substructure-cut). The minimum cardinality of all H-structure-cuts (or H-substructure-cuts) of G is defined as the H-structure-connectivity (or H-substructure-connectivity) of G, which is denoted by (or ). With the definitions above, we have .
Paths, cycle, and stars are three common structures that exist in all networks. Recently, most of the research on structure connectivity was based on these three structures. For example, star/cycle structure fault tolerance in a hypercube [
7],
k-ary
n-cube [
8], balanced hypercube [
9], and twisted hypercube [
10] was studied. Star/cycle/path structure fault tolerance in a folded hypercube [
11] and alternating group graph [
12,
13] was investigated. Cycle/path structure fault tolerance in a bubble-sort star graph [
14], bubble-sort graph [
15], and wheel network [
16] was studied.
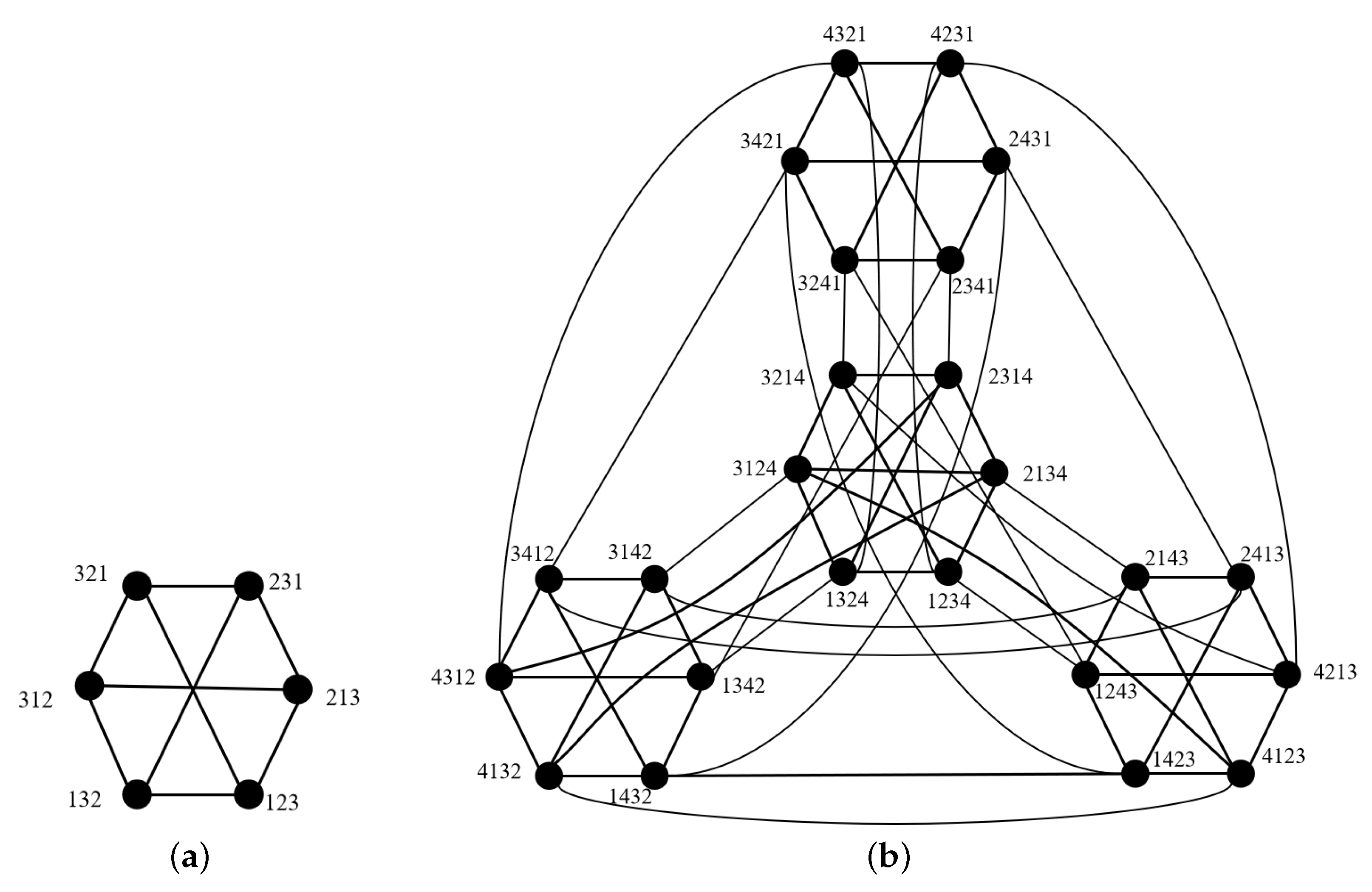
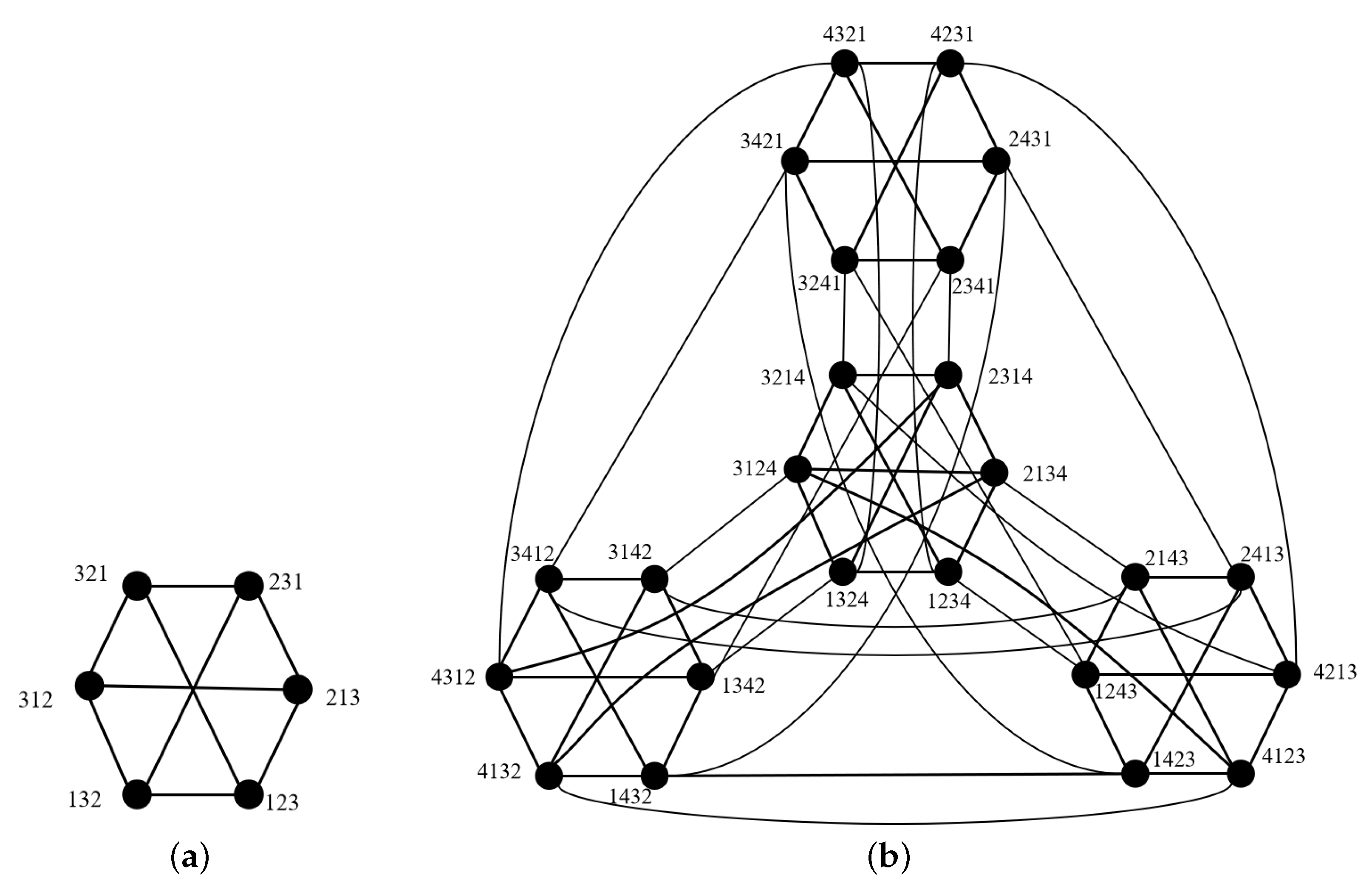
The bubble-sort graph
and star graph
, which were introduced by Akers and Krishnamurthy [
17], are two alternatives to the hypercube. These two graphs have many attractive features, except for the embeddability of
and the diameter of
. To improve the performance of these two graphs, Chou et al. [
18] proposed the bubble-sort star graph
, which is a combination of
and
. It was proven that
had a better embeddability than that of
and a smaller diameter than that of
. Hence,
has the advantages of both
and
.
In [
14], Zhang et al. gave
and
for
, where
H is a path or a cycle. In this paper, we determine the star structure fault tolerance in
. We present the upper bounds for
and
. Furthermore, we establish
and
of
, where
. We will get the following results for
with
:
and
The structure of this paper is organized as follows. First, the preliminaries will be given in
Section 2. Then, we determine the results of the structure connectivity
and substructure connectivity
in
Section 3. Finally, we give a summary of the paper in
Section 4.
3. Structure Fault Tolerance of
We first prove and for any integer , where . Then, we study the upper bounds for and .
Lemma 1 (see [
19])
For , . By Lemma 1, we can easily get the results as follows.
Theorem 1.
and for any integer .
Lemma 2 (see [
19]).
For , . Lemma 3.
Let μ be any vertex in and let for . Then, for and for .
Proof.
Let . Then, . We have and for . Since , then for . Again, we have , , , and . Then, and . Hence, for . Similarly, and for . Since , then for . □
Lemma 4.
For , and .
Proof.
Let
and
. We set
. Then,
. Obviously,
. Then,
is disconnected and
is a component of
. By Lemma 3, each
is isomorphic to
, and we get
and
. See
Figure 2 for an illustration. □
Lemma 5.
For , and .
Proof.
Let be a subgraph set of , where each is isomorphic to a connected subgraph of . To prove , we need to show that is connected. Let and . We consider the following three cases.
Case 1. .
In this case, . Since , is connected.
Case 2. .
In this case, . Since , is connected.
Case 3. and .
In this case, . By Lemma 2, is connected.
Hence, and . □
According to Lemmas 4 and 5, we have Theorem 2.
Theorem 2.
and for any integer .
Lemma 6.
For , and .
Proof.
Let
and
. Then,
. Since
,
is disconnected, and one component of
is
. Since
, each element in
H is isomorphic to
, where
is the center vertex. Then, we get
and
. See
Figure 3 for an illustration. □
Lemma 7.
Let μ be any vertex in , let be any connected subgraph in , and let be the maximum number of neighbors of μ that can be contained in M. Then, .
Proof.
Let , where is the center vertex of M. Suppose that =3. Then, we have two : and . Since is bipartite, there is no in , and we get a contradiction. Hence, . □
Lemma 8.
Let be a subgraph set of , where each is isomorphic to a connected subgraph of . If , then is connected.
Proof.
Suppose that is any vertex in . Let . By Lemma 7, . Then, by Lemma 1, is connected. □
According to Lemma 8, we have Lemma 9.
Lemma 9.
For , and .
According to Lemmas 6 and 9, we have Theorem 3.
Theorem 3.
and for any integer .
Lemma 10.
Let μ be any vertex in , and let , and have a common neighbor in for and .
Proof.
Let . Then, , , and . Let . Then, . Since and , . Hence, is the common neighbor of , and . □
Lemma 11.
Let μ be any vertex in , and let and have a common neighbor in for i with and .
Proof.
Let . Then, , . Let . Then, . Since , then . Hence, is the common neighbor of and . □
Proof.
Let be any vertex in . Each has n neighbors , so we can construct with . According to Lemma 10, we can construct , which has when n is odd. In addition, we can construct , which has when n is even. By Lemma 11, we can construct with and for . Then, if there are still vertices left, we can build with these vertices and their neighbors. We have the following four cases.
Case 1. .
We can construct as follows:
,
.
Let . Then, . Since , is disconnected and is a component of . For each in H is isomorphic to , we have and .
Case 2. .
We can construct as follows:
,
.
Let . Then, . Since , is disconnected and is a component of . For each in H is isomorphic to , we have and .
Case 3. .
We can construct as follows:
,
Let . Then, . Since , is disconnected and is a component of . For each in H is isomorphic to , we have and .
Case 4. .
We can construct as follows:
,
.
Let
. Then,
. Since
,
is disconnected and
is a component of
. For each
in
H is isomorphic to
, we have
and
. See
Figure 4 for an illustration. □
According to the proof, we give an algorithm for calculating the upper bounds of the
-(sub)structure connectivity of
(see Algorithm 1). We performed a simulation based on this algorithm to get the upper bounds of the
-(sub)structure connectivity when the dimension was
. The results obtained from the algorithm are consistent with those of Lemma 12, please see
Table 1 for reference.
| Algorithm 1 Calculate the upper bounds of -(sub)structure connectivity |
| Input: node , dimension n |
| Output: upper bounds of -(sub)structure connectivity |
| 1 switch n%4 do |
| 2 case 0: |
| 3 for to do |
| 4 construct with {}; |
| 5 for to do |
| 6 construct with {}; |
| 7 construct with {} |
| 8 case 1: |
| 9 for to do |
| 10 construct with {}; |
| 11 for to do |
| 12 construct with {}; |
| 13 construct with {}; |
| 14 case 2: |
| 15 for to do |
| 16 construct with {}; |
| 17 for to do |
| 18 construct with {}; |
| 19 construct with {}; |
| 20 case 3: |
| 21 for to do |
| 22 construct with {}; |
| 23 for to do |
| 24 construct with {}; |
| 25 end |





{kind=link}
{kind=link}
{kind=link}
{kind=link}