
Unmanned Autonomous Intelligent System in 6G Non-Terrestrial Network



Abstract
:1. Introduction
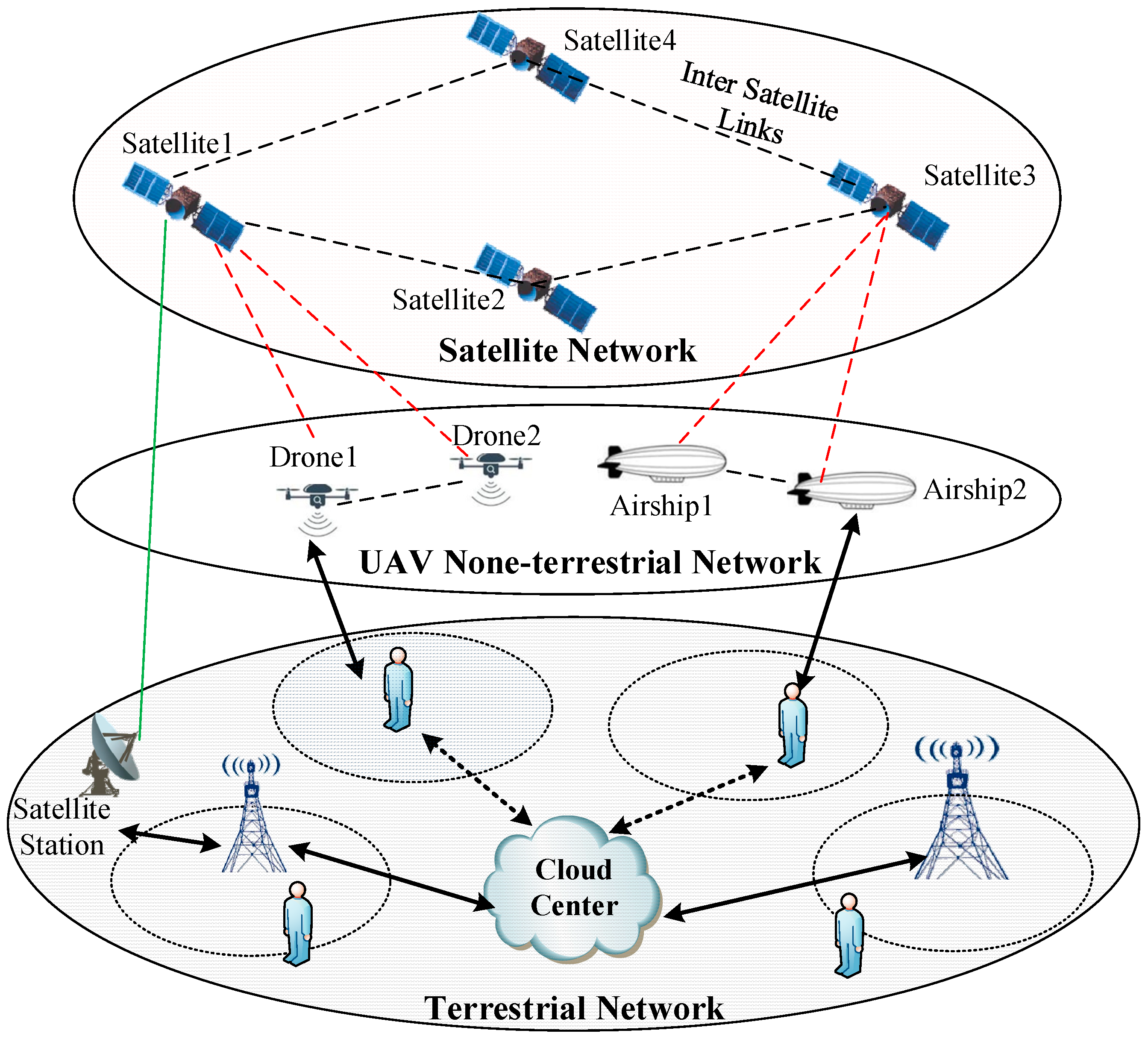
2. Non-Terrestrial Networks in 5G/6G
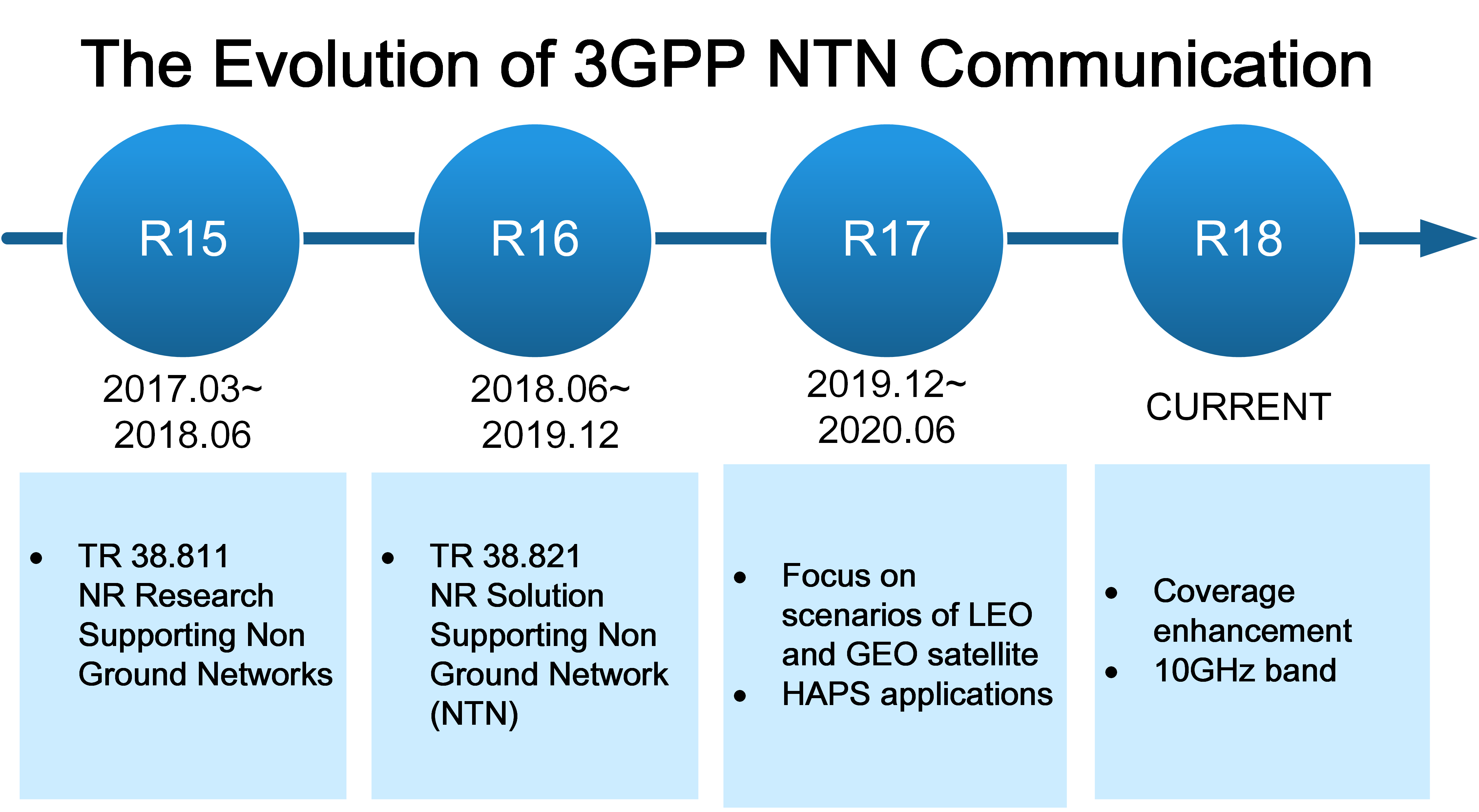
2.1. The Evolution of Non-Terrestrial Networks
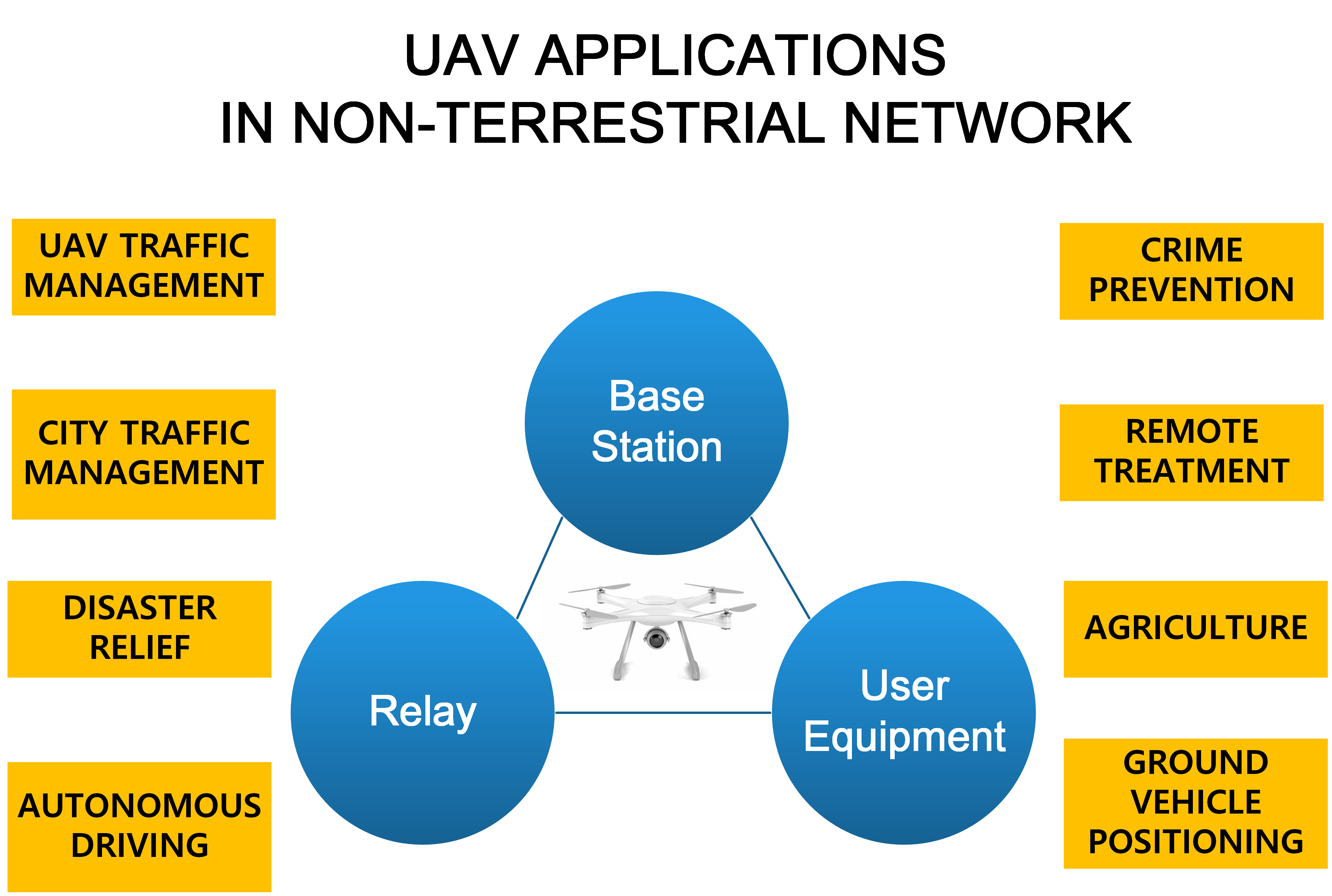
2.2. The Role of UAVs in NTNs
- (1)
- UAV platform as an NTN user: In this use case, UAV platforms are utilized as network users in an NTN architecture, which is a primary form of UAIS in NTNs. For instance, UAVs and satellites can be considered as NTN users serviced by other platforms.
- (2)
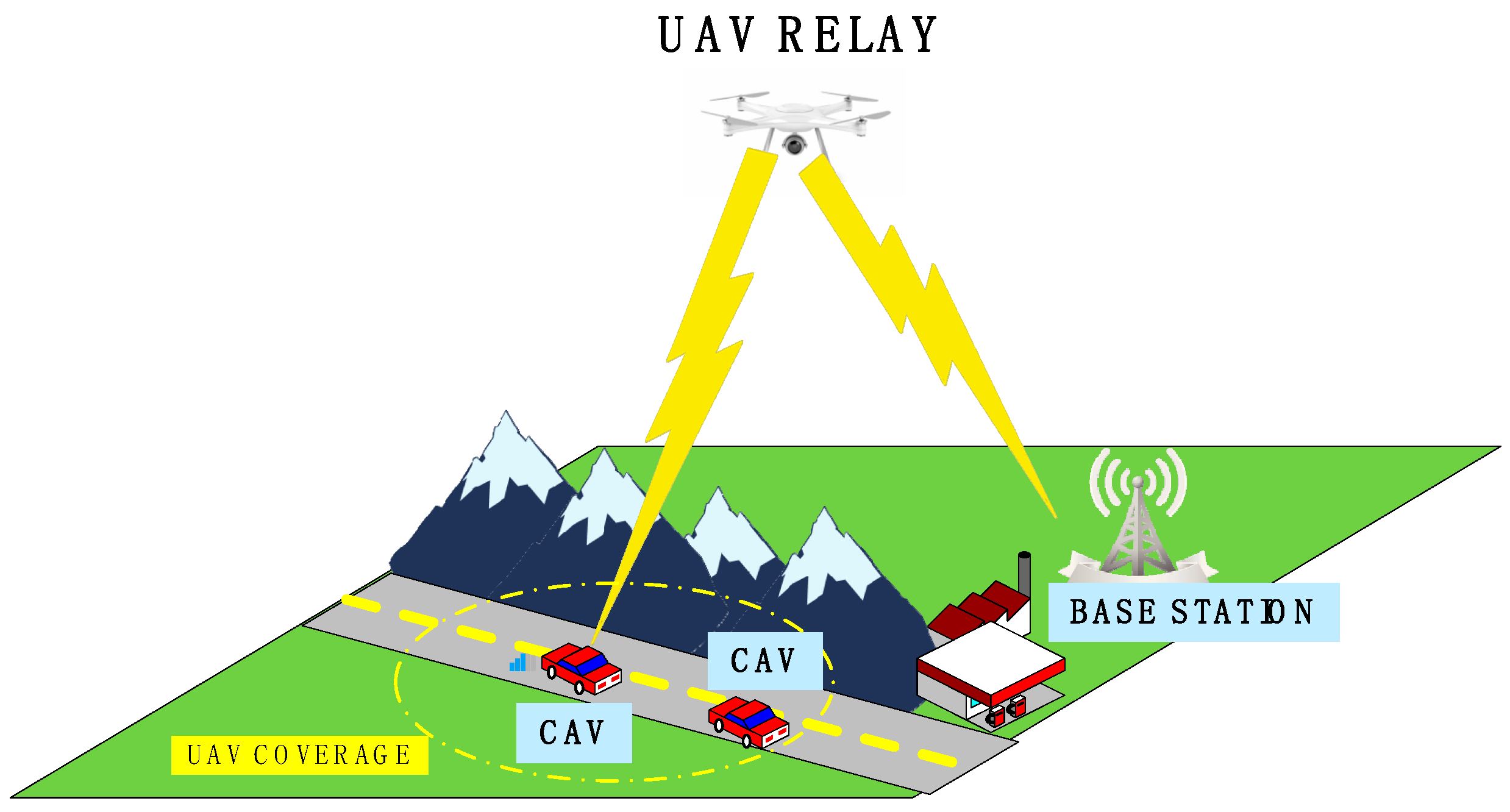
- UAV platform as an NTN relay: In this use case, UAVs are considered mobile relays for scenarios in which direct links cannot be achieved due to geographic obstacles or extended communication ranges.
- (3)
- UAV platform as an NTN base station: In this case, UAVs are equipped with base stations for connectivity coverage. Sometimes, UAV platforms with abundant payload capabilities are further utilized for multi-edge computing.
3. UAV-Assisted Non-Terrestrial Networks
3.1. UAV Path Planning and Control in NTN Communications
- (1)
- UAV Path Planning for Flying Base Stations Scenario
- (2)
- UAV Path Planning for Aerial Mobile Relay
- (3)
- UAV Path Planning for Cellular-Connected UAV User Equipment
3.2. UAV Mobile Edge Computing in NTN Communications
3.3. Unmanned Aerial Vehicles Application in NTNs
- (1)
- Delivery
- (2)
- UAV traffic management
- (3)
- Disaster Relief and Management:
4. Application of UAV-Aided Non-Terrestrial Networks in UAIS
4.1. Unmanned Ground Vehicle in UAV-Aided NTN Communication
4.1.1. Communication Requirements of Unmanned Ground Vehicle in NTN Communication
- Communication for uploading work scenarios and updating the knowledge base;
- Remote communication for offloading the local processing tasks of the UGV to the edge server or cloud server;
- Command and control (C2) of UGV, including the transmission of first-person view (FPV) video information and real-time control instructions to the UGV operator or supervisor.
4.1.2. NTN Communication in Unmanned Ground Vehicle Control
4.2. Connected and Automated Vehicles in UAV-Aided NTNs
4.2.1. Vehicle-to-Everything Communication via NTN
4.2.2. 6G NTN-Enabled CAV Capabilities

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature | Topics | Contributions | Limitations |
|---|---|---|---|
| [143] | Traffic monitoring in complex environments | Utilizing blockchain-based UAV/HAPS communication to assist traffic perception data transmission | The architecture of internet of drones need further study. |
| [144] | Traffic monitoring in complex environments | Offloading/sharing decision making using a sequential game method | The edge computing architecture was not mentioned in detail |
| [145] | Localization | Utilizing UAV-based method to assist localization | The moving vehicles and terrain blockage severely impact UAV–vehicle communication |
| [146] | Localization | Achieve vehicle localization with signal strength with a swarm of UAVs | The interference and uncertainty of wireless channel hindered the reliability of communication. |
| [147] | Vehicle platoon control | A sliding mode controller was proposed based on the observed vehicle states for longitudinal cooperation of CAVs | Inter vehicle information was not discussed. |
| [148] | Vehicle platoon | Power allocation of uplink NOMA in vehicle platoon | The platoon method needs in-depth discussion |
| [149] | Vehicle platoon | Joint resource optimization and mobility control of UAV-aided vehicles platoon | The role of vehicle platoon in MEC require in-depth study |
| [150] | Vehicle platoon | Joint Communication and Computation Resource Scheduling of a UAV-Assisted Mobile Edge Computing System for Platooning Vehicles | The wireless power transmission mechanism of vehicles require investigation. |
| [151] | Vehicle platoon | An energy consumption minimization-based resource management paradigm was proposed | The platoon method of the ground vehicle was not covered |
4.3. Unmanned Maritime Vehicles in UAV-Aided NTN Communication
4.3.1. Unmanned Surface Vessels in NTN Communication
- (1)
- UAV-Aided Maritime Communication for USVs
- (2)
- USV-assisted maritime communications
4.3.2. Unmanned Underwater Vehicles in Underwater Communications
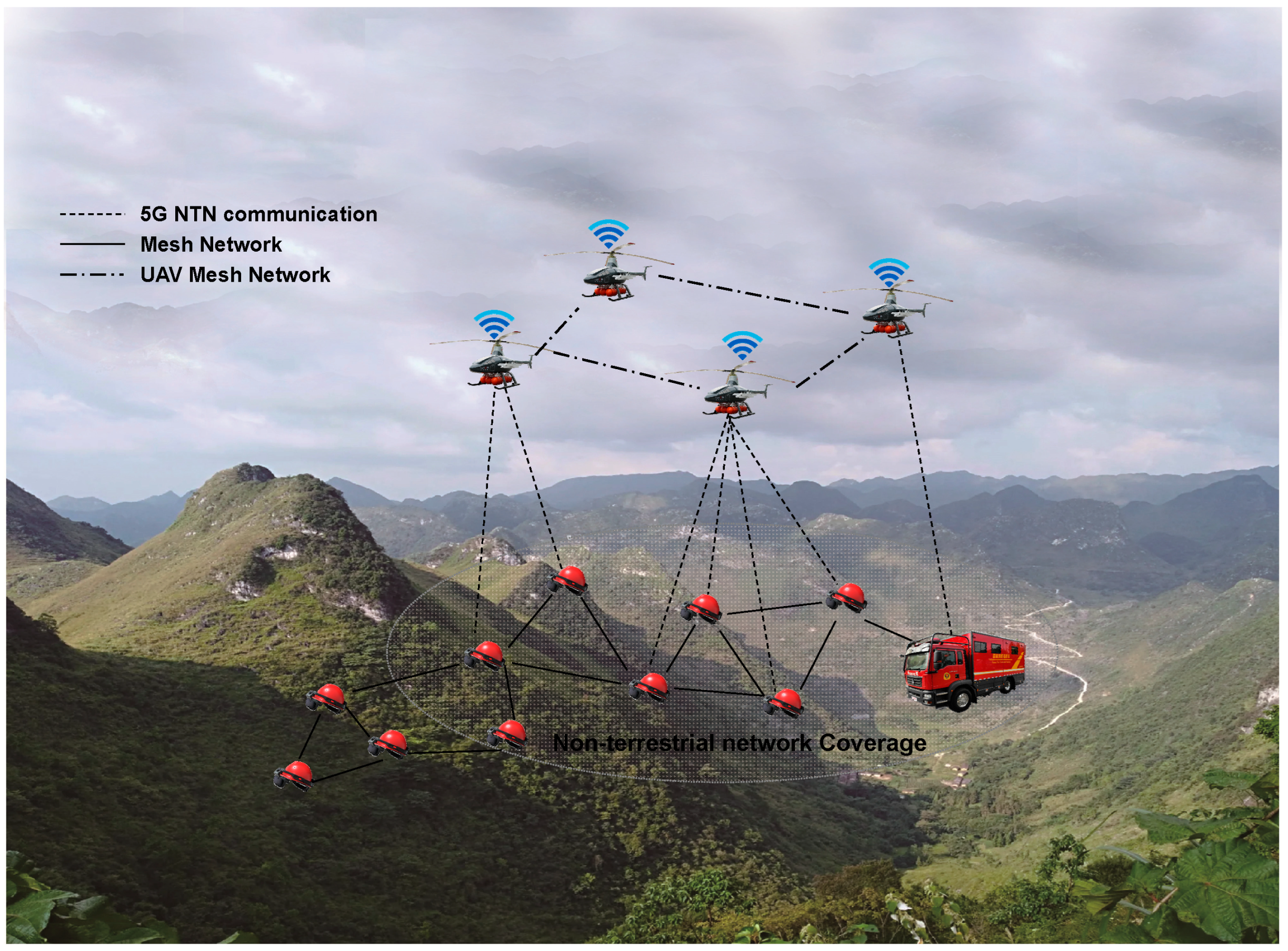
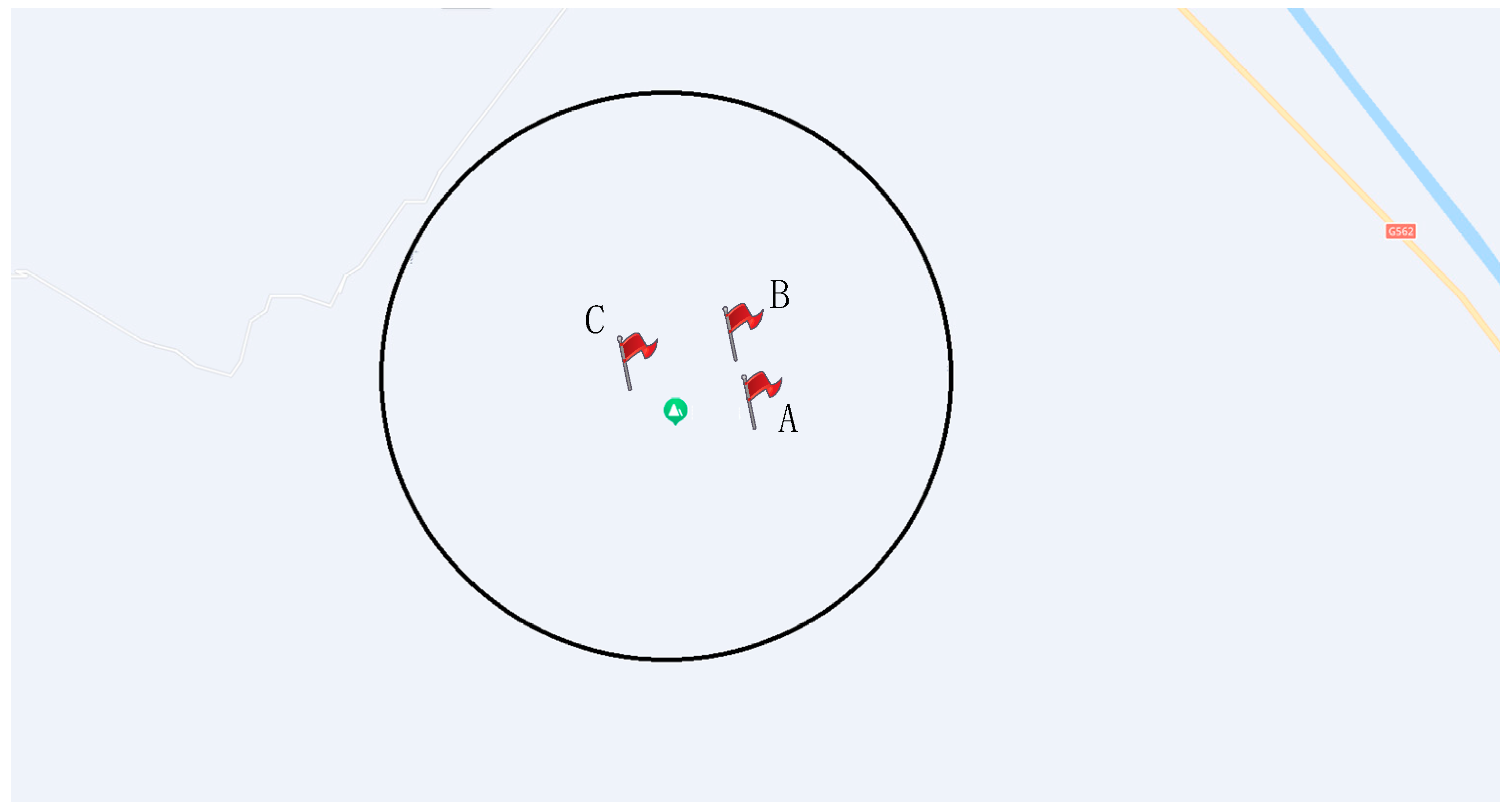
5. A Case Study of UAV NTN Airborne Network in Mountainous Area
5.1. Design of Field Trial of UAV NTN Network System
5.2. Field Trial Results
5.2.1. Parameters
5.2.2. Results and Analysis
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kota, S.; Giambene, G. 6G Integrated Non-Terrestrial Networks: Emerging Technologies and Challenges. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Araniti, G.; Iera, A.; Pizzi, S.; Rinaldi, F. Toward 6G Non-Terrestrial Networks. IEEE Netw. 2022, 36, 113–120. [Google Scholar] [CrossRef]
- Hong, E.-K.; Lee, I.; Shim, B.; Ko, Y.-C.; Kim, S.-H.; Pack, S.; Lee, K.; Kim, S.; Kim, J.-H.; Shin, Y.; et al. 6G R&D vision: Requirements and candidate technologies. J. Commun. Netw. 2022, 24, 232–245. [Google Scholar]
- Beniiche, A.; Rostami, S.; Maier, M. Robonomics in the 6G Era: Playing the Trust Game with On-Chaining Oracles and Persuasive Robots. IEEE Access 2021, 9, 46949–46959. [Google Scholar] [CrossRef]
- Miao, Y.; Xu, J.; Chen, M.; Hwang, K. Drone enabled Smart Air-Agent for 6G Network. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 1–6. [Google Scholar]
- Srinivasu, P.N.; Ijaz, M.F.; Shafi, J.; Woźniak, M.; Sujatha, R. 6G Driven Fast Computational Networking Framework for Healthcare Applications. IEEE Access 2022, 10, 94235–94248. [Google Scholar] [CrossRef]
- Sharma, G.P.; Sharma, G.P.; Patel, D.; Sachs, J.; De Andrade, M.; Farkas, J.; Harmatos, J.; Varga, B.; Bernhard, H.-P.; Muzaffar, R.; et al. Toward Deterministic Communications in 6G Networks: State of the Art, Open Challenges and the Way Forward. IEEE Access 2023, 11, 106898–106923. [Google Scholar] [CrossRef]
- Grieco, L.A.; Piro, G.; Petrosino, A.; Morosi, S.; Guidotti, A.; Tarchi, D.; Vanelli-Coralli, A.; Cianca, E.; Ruggieri, M.; Salvo, P.; et al. Integration of Terrestrial and Non-Terrestrial Networks for Automotive: Challenges and perspectives within the S11 RESTART project. In Proceedings of the 2023 AEIT International Conference on Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Modena, Italy, 17–19 July 2023; pp. 1–6. [Google Scholar]
- Mishra, D.; Vegni, A.M.; Loscrí, V.; Natalizio, E. Drone Networking in the 6G Era: A Technology Overview. IEEE Commun. Stand. Mag. 2021, 5, 88–95. [Google Scholar] [CrossRef]
- Birabwa, D.J.; Ramotsoela, D.; Ventura, N. Multi-agent deep reinforcement learning for user association and resource allocation in integrated terrestrial and non-terrestrial networks. Comput. Netw. 2023, 231, 109827. [Google Scholar] [CrossRef]
- Li, D.; Bao, N. Delay-Doppler Robust Spectrum Sharing of UAV and Terrestrial Systems Aided by Assistive Slots. IEEE Trans. Veh. Technol. 2021, 70, 7692–7704. [Google Scholar] [CrossRef]
- Ovatman, T.; Kurt, G.K.; Yanikomeroglu, H. An Accurate Model for Computation Offloading in 6G Networks and a HAPS-Based Case Study. IEEE Open J. Commun. Soc. 2022, 3, 1963–1977. [Google Scholar] [CrossRef]
- Vrind, T.; Rao, S.; Pathak, L.; Das, D. Deep Learning-based LAP Deployment and Aerial Infrastructure Sharing in 6G. In Proceedings of the 2020 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 2–4 July 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Jiang, W.; Han, B.; Habibi, M.A.; Schotten, H.D. The Road Towards 6G: A Comprehensive Survey. IEEE Open J. Commun. Soc. 2021, 2, 334–366. [Google Scholar] [CrossRef]
- Giordani, M.; Zorzi, M. Non-Terrestrial Networks in the 6G Era: Challenges and Opportunities. IEEE Netw. 2021, 35, 244–251. [Google Scholar] [CrossRef]
- Lu, H.; Zeng, Y.; Jin, S.; Zhang, R. Aerial Intelligent Reflecting Surface: Joint Placement and Passive Beamforming Design with 3D Beam Flattening. IEEE Trans. Wirel. Commun. 2021, 20, 4128–4143. [Google Scholar] [CrossRef]
- Vaezi, M.; Azari, A.; Khosravirad, S.R.; Shirvanimoghaddam, M.; Azari, M.M.; Chasaki, D.; Popovski, P. Cellular, Wide-Area, and Non-Terrestrial IoT: A Survey on 5G Advances and the Road Toward 6G. IEEE Commun. Surv. Tutor. 2022, 24, 1117–1174. [Google Scholar] [CrossRef]
- Gustavsson, U.; Frenger, P.; Fager, C.; Eriksson, T.; Zirath, H.; Dielacher, F.; Studer, C.; Parssinen, A.; Correia, R.; Matos, J.N.; et al. Implementation Challenges and Opportunities in Beyond-5G and 6G Communication. IEEE J. Microw. 2021, 1, 86–100. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, W.; Wang, J.; Quek, T.Q.S. Hybrid Satellite-UAV-Terrestrial Networks for 6G Ubiquitous Coverage: A Maritime Communications Perspective. IEEE J. Sel. Areas Commun. 2021, 39, 3475–3490. [Google Scholar] [CrossRef]
- Azari, M.M.; Solanki, S.; Chatzinotas, S.; Kodheli, O.; Sallouha, H.; Colpaert, A.; Montoya, J.F.M.; Pollin, S.; Haqiqatnejad, A.; Mostaani, A.; et al. Evolution of Non-Terrestrial Networks From 5G to 6G: A Survey. IEEE Commun. Surv. Tutor. 2022, 24, 2633–2672. [Google Scholar] [CrossRef]
- 5G Non Terrestrial Networks White Paper. Available online: https://www.5gamericas.org/wp-content/uploads/2022/01/5G-Non-Terrestrial-Networks-2022-WP-Id.pdf (accessed on 29 December 2023).
- Cui, H.; Zhang, J.; Geng, Y.; Xiao, Z.; Sun, T.; Zhang, N.; Liu, J.; Wu, Q.; Cao, X. Space-air-ground integrated network (SAGIN) for 6G: Requirements, architecture and challenges. China Commun. 2022, 19, 90–108. [Google Scholar] [CrossRef]
- Waqar, N.; Hassan, S.A.; Mahmood, A.; Dev, K.; Do, D.-T.; Gidlund, M. Computation Offloading and Resource Allocation in MEC-Enabled Integrated Aerial-Terrestrial Vehicular Networks: A Reinforcement Learning Approach. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21478–21491. [Google Scholar] [CrossRef]
- Hokazono, Y.; Kohara, H.; Kishiyama, Y.; Asai, T. Extreme Coverage Extension in 6G: Cooperative Non-terrestrial Network Architecture Integrating Terrestrial Networks. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 138–143. [Google Scholar] [CrossRef]
- Ozger, M.; Godor, I.; Nordlow, A.; Heyn, T.; Pandi, S.; Peterson, I.; Viseras, A.; Holis, J.; Raffelsberger, C.; Kercek, A.; et al. 6G for Connected Sky: A Vision for Integrating Terrestrial and Non-Terrestrial Networks. In Proceedings of the 2023 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), Gothenburg, Sweden, 6–9 June 2023; pp. 711–716. [Google Scholar] [CrossRef]
- Qi, W.; Wang, H.; Xia, X.; Mei, C.; Liu, Y.; Xing, Y. Research on Novel Type of Non Terrestrial Network Architecture for 6G. In Proceedings of the 2023 International Wireless Communications and Mobile Computing (IWCMC), Marrakesh, Morocco, 19–23 June 2023; pp. 1281–1285. [Google Scholar] [CrossRef]
- Hokazono, Y.; Kohara, H.; Kishiyama, Y.; Asai, T. 3D-Cell Control Technology for Frequency Sharing between HAPS and Terrestrial Systems. In Proceedings of the 2022 IEEE International Workshop on Electromagnetics: Applications and Student Innovation Competition (iWEM), Narashino, Japan, 29–31 August 2022; pp. 99–100. [Google Scholar] [CrossRef]
- Cody, T.; Beling, P.A. Applying Learning Systems Theory to Model Cognitive Unmanned Aerial Vehicles. In Proceedings of the 2023 IEEE Cognitive Communications for Aerospace Applications Workshop (CCAAW), Cleveland, OH, USA, 20–22 June 2023; pp. 1–4. [Google Scholar]
- Zakharin, F.; Ponomarenko, S. Unmanned aerial vehicle integrated navigation complex with adaptive tuning. In Proceedings of the 2017 IEEE 4th International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), Kiev, Ukraine, 17–19 October 2017; pp. 23–26. [Google Scholar]
- Wan, N.; Jia, X.; Lv, Y.; Jing, L. Antenna tilt optimization scheme of UAV base station in multi-cell millimeter wave communication system. In Proceedings of the 2021 International Conference on Electronics, Circuits and Information Engineering (ECIE), Zhengzhou, China, 22–24 January 2021; pp. 196–199. [Google Scholar] [CrossRef]
- Hwang, S.; Seo, B.-S.; Kim, D.H. UAV Position & Cell Partition Optimization Considering User Distribution and Data Rate in UAV Network. In Proceedings of the 2022 13th International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 19–21 October 2022; pp. 533–535. [Google Scholar] [CrossRef]
- Qin, Z.; Liu, Z.; Han, G.; Lin, C.; Guo, L.; Xie, L. Distributed UAV-BSs Trajectory Optimization for User-Level Fair Communication Service with Multi-Agent Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2021, 70, 12290–12301. [Google Scholar] [CrossRef]
- Saxena, V.; Jaldén, J.; Klessig, H. Optimal UAV Base Station Trajectories Using Flow-Level Models for Reinforcement Learning. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 1101–1112. [Google Scholar] [CrossRef]
- Yang, M.; Jeon, S.-W.; Kim, D.K. Optimal Trajectory for Curvature-Constrained UAV Mobile Base Stations. IEEE Wirel. Commun. Lett. 2020, 9, 1056–1059. [Google Scholar] [CrossRef]
- Bhandarkar, A.B.; Jayaweera, S.K. Optimal Trajectory Learning for UAV-Mounted Mobile Base Stations using RL and Greedy Algorithms. In Proceedings of the 2021 17th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Bologna, Italy, 11–13 October 2021; pp. 13–18. [Google Scholar] [CrossRef]
- Wu, S.; Pu, Z.; Liu, Z.; Qiu, T.; Yi, J.; Zhang, T. Multi-target Coverage with Connectivity Maintenance using Knowledge-incorporated Policy Framework. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Jiang, X.; Wu, Z.; Yin, Z.; Yang, W.; Yang, Z. Trajectory and Communication Design for UAV-Relayed Wireless Networks. IEEE Wirel. Commun. Lett. 2019, 8, 1600–1603. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; He, Q.; Bian, K.; Song, L. Joint Trajectory and Power Optimization for UAV Relay Networks. IEEE Wirel. Commun. Lett. 2018, 22, 161–164. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, F.; Wang, Y.; Wu, Q. Joint 3D trajectory and resource optimization for a UAV relay-assisted cognitive radio network. China Commun. 2021, 18, 184–200. [Google Scholar] [CrossRef]
- Wu, Y.; Yang, W.; Guan, X.; Wu, Q. UAV-Enabled Relay Communication Under Malicious Jamming: Joint Trajectory and Transmit Power Optimization. IEEE Trans. Veh. Technol. 2021, 70, 8275–8279. [Google Scholar] [CrossRef]
- Lee, J.; Friderikos, V. Trajectory Planning for Multiple UAVs in UAV-aided Wireless Relay Network. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Prasad, N.L.; Ramkumar, B. 3-D Deployment and Trajectory Planning for Relay Based UAV Assisted Cooperative Communication for Emergency Scenarios Using Dijkstra’s Algorithm. IEEE Trans. Veh. Technol. 2023, 72, 5049–5063. [Google Scholar] [CrossRef]
- Yin, D.; Yang, X.; Yu, H.; Chen, S.; Wang, C. An Air-to-Ground Relay Communication Planning Method for UAVs Swarm Applications. IEEE Trans. Intell. Veh. 2023, 8, 2983–2997. [Google Scholar] [CrossRef]
- Senadhira, N.; Durrani, S.; Zhou, X.; Yang, N.; Ding, M. Uplink NOMA for Cellular-Connected UAV: Impact of UAV Trajectories and Altitude. IEEE Trans. Commun. 2020, 68, 5242–5258. [Google Scholar] [CrossRef]
- Yang, D.; Dan, Q.; Xiao, L.; Liu, C.; Cuthbert, L. An efficient trajectory planning for cellular-connected UAV under the connectivity constraint. China Commun. 2021, 18, 136–151. [Google Scholar] [CrossRef]
- Hao, Q.; Zhao, H.; Huang, H.; Gui, G.; Ohtsuki, T.; Adachi, F. Deep Reinforcement Learning Aided Online Trajectory Optimization of Cellular-Connected UAVs with Offline Map Reconstruction. In Proceedings of the 2023 IEEE 97th Vehicular Technology Conference (VTC2023-Spring), Florence, Italy, 20–23 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y. Energy Minimization for Cellular-Connected UAV: From Optimization to Deep Reinforcement Learning. IEEE Trans. Wirel. Commun. 2022, 21, 5541–5555. [Google Scholar] [CrossRef]
- Hu, S.; Yuan, X.; Ni, W.; Wang, X. Trajectory Planning of Cellular-Connected UAV for Communication-Assisted Radar Sensing. IEEE Trans. Commun. 2022, 70, 6385–6396. [Google Scholar] [CrossRef]
- Chowdhury, M.M.U.; Maeng, S.J.; Bulut, E.; Güvenç, İ. 3-D Trajectory Optimization in UAV-Assisted Cellular Networks Considering Antenna Radiation Pattern and Backhaul Constraint. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3735–3750. [Google Scholar] [CrossRef]
- Chen, Y.J.; Huang, D.Y. Joint Trajectory Design and BS Association for Cellular-Connected UAV: An Imitation-Augmented Deep Reinforcement Learning Approach. IEEE Internet Things J. 2022, 9, 2843–2858. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, R. Trajectory Design for Cellular-Connected UAV Under Outage Duration Constraint. In Proceedings of the ICC 2019—2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019. [Google Scholar]
- Li, P.; Xie, L.; Yao, J.; Xu, J. Cellular-Connected UAV with Adaptive Air-to-Ground Interference Cancellation and Trajectory Optimization. IEEE Commun. Lett. 2022, 26, 1368–1372. [Google Scholar] [CrossRef]
- Amer, R.; Saad, W.; Marchetti, N. Mobility in the Sky: Performance and Mobility Analysis for Cellular-Connected UAVs. IEEE Trans. Commun. 2020, 68, 3229–3246. [Google Scholar] [CrossRef]
- Lee, J.; Friderikos, V. Interference-aware path planning optimization for multiple UAVs in beyond 5G networks. J. Commun. Netw. 2022, 24, 125–138. [Google Scholar] [CrossRef]
- Shiri, H.; Seo, H.; Park, J.; Bennis, M. Attention-Based Communication and Control for Multi-UAV Path Planning. IEEE Wirel. Commun. Lett. 2022, 11, 1409–1413. [Google Scholar] [CrossRef]
- Eldeeb, E.; Perez, D.E.; Sant'Ana, J.M.d.S.; Shehab, M.; Mahmood, N.H.; Alves, H.; Latva-Aho, M. A Learning-Based Trajectory Planning of Multiple UAVs for AoI Minimization in IoT Networks. In Proceedings of the 2022 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), Grenoble, France, 7–10 June 2022; pp. 172–177. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Alsharif, M.H.; Uthansakul, P.; Solyman, A.A.A. Intelligent Reflecting Surfaces Assisted UAV Communications for Massive Networks: Current Trends, Challenges, and Research Directions. Sensors 2022, 22, 5278. [Google Scholar] [CrossRef]
- Ahmed, S.; Kamal, A.E. Sky’s the Limit: Navigating 6G with ASTAR-RIS for UAVs Optimal Path Planning. In Proceedings of the 2023 IEEE Symposium on Computers and Communications (ISCC), Gammarth, Tunisia, 9–12 July 2023; pp. 582–587. [Google Scholar] [CrossRef]
- Eskandari, M.; Savkin, A.V. AI-based Navigation and Communication Control for a Team of UAVs with Reconfigurable Intelligent Surfaces Supporting Mobile Internet of Vehicles. In Proceedings of the 2023 IEEE Conference on Control Technology and Applications (CCTA), Bridgetown, Barbados, 16–18 August 2023; pp. 234–238. [Google Scholar] [CrossRef]
- Zhang, X.X.; Wang, Y.C. DeepMECagent: Multi-agent computing resource allocation for UAV-assisted mobile edge computing in distributed IoT system. Appl. Intell. 2023, 53, 1180–1191. [Google Scholar] [CrossRef]
- Wu, G.; Miao, Y.; Zhang, Y.; Barnawi, A. Energy efficient for UAV-enabled mobile edge computing networks: Intelligent task prediction and offloading. Comput. Commun. 2020, 150, 556–562. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, Z.-Y.; Min, L.; Tang, C.; Zhang, H.-Y.; Wang, Y.-H.; Cai, P. Task Offloading and Trajectory Control for UAV-Assisted Mobile Edge Computing Using Deep Reinforcement Learning. IEEE Access 2021, 9, 53708–53719. [Google Scholar] [CrossRef]
- Liu, B.; Wan, Y.; Zhou, F.; Wu, Q.; Hu, R.Q. Resource Allocation and Trajectory Design for MISO UAV-Assisted MEC Networks. Ieee Trans. Veh. Technol. 2022, 71, 4933–4948. [Google Scholar] [CrossRef]
- Han, D.; Shi, T. Secrecy Capacity Maximization for a UAV-Assisted MEC System. China Commun. 2020, 17, 64–81. [Google Scholar] [CrossRef]
- Gao, Y.; Guo, Y.; Wang, P.; Yang, S.; Wang, J.; Wang, X.; Ding, Y.; Lu, W.; Zhang, Y.; Huang, G.; et al. Secure Enhancement in NOMA-based UAV-MEC Networks. In Proceedings of the IEEE Infocom 2022—IEEE Conference on Computer Communications Workshops (Infocom Wkshps), New York, NY, USA, 2–5 May 2022. [Google Scholar]
- Lu, W.; Ding, Y.; Gao, Y.; Chen, Y.; Zhao, N.; Ding, Z.; Nallanathan, A. Secure NOMA-Based UAV-MEC Network Towards a Flying Eavesdropper. IEEE Trans. Commun. 2022, 70, 3364–3376. [Google Scholar] [CrossRef]
- Verma, A.; Bhattacharya, P.; Saraswat, D.; Tanwar, S.; Kumar, N.; Sharma, R. SanJeeVni: Secure UAV-Envisioned Massive Vaccine Distribution for COVID-19 Underlying 6G Network. IEEE Sens. J. 2023, 23, 955–968. [Google Scholar] [CrossRef]
- Cheema, M.A.; Ansari, R.I.; Ashraf, N.; Hassan, S.A.; Qureshi, H.K.; Bashir, A.K.; Politis, C. Blockchain-based secure delivery of medical supplies using drones. Comput. Netw. 2022, 204, 108706. [Google Scholar] [CrossRef]
- Shan, L.; Miura, R.; Matsuda, T.; Koshikawa, M.; Li, H.-B.; Matsumura, T. Vehicle-to-Vehicle Based Autonomous Flight Coordination Control System for Safer Operation of Unmanned Aerial Vehicles. Drones 2023, 7, 669. [Google Scholar] [CrossRef]
- Shrestha, R.; Bajracharya, R.; Kim, S. 6G Enabled Unmanned Aerial Vehicle Traffic Management: A Perspective. IEEE Access 2021, 9, 91119–91136. [Google Scholar] [CrossRef]
- Kumar, A.; Yadav, A.S.; Gill, S.S.; Pervaiz, H.; Ni, Q.; Buyya, R. A secure drone-to-drone communication and software defined drone network-enabled traffic monitoring system. Simul. Model. Pract. Theory 2022, 120, 102621. [Google Scholar] [CrossRef]
- Matracia, M.; Kishk, M.A.; Alouini, M.-S. UAV-Aided Post-Disaster Cellular Networks: A Novel Stochastic Geometry Approach. IEEE Trans. Veh. Technol. 2023, 72, 9406–9418. [Google Scholar] [CrossRef]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Mosali, N.A.; Deepak, G.C.; Alsamhi, S.H. Skyward bound: Empowering disaster resilience with multi-UAV-assisted B5G networks for enhanced connectivity and energy efficiency. Internet Things 2023, 23, 100885. [Google Scholar] [CrossRef]
- Jin, N.; Gui, J.; Zhou, X. Equalizing service probability in UAV-assisted wireless powered mmWave networks for post-disaster rescue. Comput. Netw. 2023, 225, 109644. [Google Scholar] [CrossRef]
- Matracia, M.; Kishk, M.A.; Alouini, M.-S. On the Topological Aspects of UAV-Assisted Post-Disaster Wireless Communication Networks. IEEE Commun. Mag. 2021, 59, 59–64. [Google Scholar] [CrossRef]
- Bushnaq, O.M.; Mishra, D.; Natalizio, E.; Akyildiz, I.F. Chapter 9—Unmanned aerial vehicles (UAVs) for disaster management. In Micro and Nano Technologies, Nanotechnology-Based Smart Remote Sensing Networks for Disaster Prevention; Elsevier: Amsterdam, The Netherlands, 2022; pp. 159–188. [Google Scholar]
- Ejaz, W.; Ahmed, A.; Mushtaq, A.; Ibnkahla, M. Energy-efficient task scheduling and physiological assessment in disaster management using UAV-assisted networks. Comput. Commun. 2020, 155, 150–157. [Google Scholar] [CrossRef]
- Wu, K.-S.; He, Y.-R.; Chen, Q.-J.; Zheng, Y.-M. Analysis on the damage and recovery of typhoon disaster based on UAV orthograph. Microelectron. Reliab. 2020, 107, 113337. [Google Scholar] [CrossRef]
- Rodríguez-Piñeiro, J.; Liu, W.; Wang, Y.; Yin, X.; Lee, J.; Kim, M.-D. Deep Learning-Based Joint Communication and Sensing for 6G Cellular-Connected UAVs. In Proceedings of the 2022 16th European Conference on Antennas and Propagation (EuCAP), Madrid, Spain, 27 March–1 April 2022; pp. 1–2. [Google Scholar]
- Zheng, H.; Hong, H.; Tang, S. Model Predictive Static Programming Rendezvous Trajectory Generation of Unmanned Aerial Vehicles. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 17–19 October 2019; pp. 415–420. [Google Scholar]
- Castelin, S.; Bernstein, P. A notional scenario for the use of unmanned system groups in littoral warfare. In Proceedings of the 2004 IEEE/OES Autonomous Underwater Vehicles, Sebasco, ME, USA, 17–18 June 2004; pp. 14–19. [Google Scholar]
- Lochtefeld, J.; Schlager, S.; Bryan, S.; Harbour, S.; Colter, J. Human Vs. Autonomous Agents: Drone racing and Obstacle Avoidance. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–5. [Google Scholar]
- Monica, L. Low-Cost System Architecture Solutions for Small Unmanned Aircraft Traffic Management. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–6. [Google Scholar]
- Gao, Q.; Lei, T.; Yao, W.; Zhang, X.; Zhang, X. A health-aware energy management strategy for fuel cell hybrid electric UAVs based on safe reinforcement learning. Energy 2023, 283, 129092. [Google Scholar] [CrossRef]
- Zhang, W.; Zhai, C. Coverage Control of Unmanned Aerial Vehicles for Periodical Monitoring of Geohazards. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 15–17 October 2021; pp. 293–298. [Google Scholar]
- Hakan, S.; Metin, C. Defining the Variables of a Remote Operation Monitoring Systems Onboard Unmanned Surface Vessels. In Proceedings of the 2022 6th International Conference on Information Technology, Information Systems and Electrical Engineering (ICITISEE), Yogyakarta, Indonesia, 13–14 December 2022; pp. 591–594. [Google Scholar]
- Meng, X. Reliability Allocation Method for Unmanned Underwater System Based on Intuitionistic Fuzzy. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems and Artificial Intelligence (ICUSAI), Xi’an, China, 22–24 November 2019; pp. 67–70. [Google Scholar]
- Kumar MM, S.; Yadav, H.; Soman, D.; Kumar, A. Acoustic Localization for Autonomous Unmanned Systems. In Proceedings of the 2020 14th International Conference on Innovations in Information Technology (IIT), Al Ain, United Arab Emirates, 17–18 November 2020; pp. 69–74. [Google Scholar]
- Kubyshkin, E.P.; Petukhov, P.E.; Vishnyakov, D.Y. Simulation of Network Traffic of the Information Exchange and Control System of a Group of Unmanned Aerial Vehicles. In Proceedings of the 2022 Systems of Signal Synchronization, Generating and Processing in Telecommunications (SYNCHROINFO), Arkhangelsk, Russia, 29 June–1 July 2022; pp. 1–4. [Google Scholar]
- Janssen, R.; van de Molengraft, R.; Bruyninckx, H.; Steinbuch, M. Cloud based centralized task control for human domain multi-robot operations. Intell. Serv. Robot. 2016, 9, 63–77. [Google Scholar] [CrossRef]
- Scola, I.R.; Reyes, G.A.G.; Carrillo, L.R.G.; Hespanha, J.P.; Burlion, L. A Robust Control Strategy with Perturbation Estimation for the Parrot Mambo Platform. IEEE Trans. Control. Syst. Technol. 2021, 29, 1389–1404. [Google Scholar] [CrossRef]
- Collins, G.; Clausse, A.; Twining, D. Enabling technologies for autonomous offshore inspections by heterogeneous unmanned teams. In Proceedings of the OCEANS 2017—Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–5. [Google Scholar]
- Zhang, J.; Cui, H.; Yang, A.L.; Gu, F.; Shi, C.; Zhang, W.; Niu, S. An intelligent digital twin system for paper manufacturing in the paper industry. Expert Syst. Appl. 2023, 230, 120614. [Google Scholar] [CrossRef]
- Mourtzis, D. Smart Manufacturing and Tactile Internet Powered by 5G: Investigation of Current Developments, Challenges, and Future Trends. Procedia CIRP 2021, 104, 1960–1969. [Google Scholar] [CrossRef]
- Qiao, L.; Li, Y.; Chen, D.; Serikawa, S.; Guizani, M.; Lv, Z. A survey on 5G/6G, AI, and Robotics. Comput. Electr. Eng. 2021, 95, 107372. [Google Scholar] [CrossRef]
- Shojaeinasab, A.; Charter, T.; Jalayer, M.; Khadivi, M.; Ogunfowora, O.; Raiyani, N.; Yaghoubi, M.; Najjaran, H. Intelligent manufacturing execution systems: A systematic review. J. Manuf. Syst. 2022, 62, 503–522. [Google Scholar] [CrossRef]
- Glaroudis, D.; Iossifides, A.; Chatzimisios, P. Survey, comparison and research challenges of IoT application protocols for smart farming. Comput. Netw. 2020, 168, 107037. [Google Scholar] [CrossRef]
- Charania, I.; Li, X. Smart farming: Agriculture’s shift from a labor intensive to technology native industry. Internet Things 2020, 9, 100142. [Google Scholar] [CrossRef]
- Boursianis, A.D.; Papadopoulou, M.S.; Diamantoulakis, P.; Liopa-Tsakalidi, A.; Barouchas, P.; Salahas, G.; Karagiannidis, G.; Wan, S.; Goudos, S.K. Internet of Things (IoT) and Agricultural Unmanned Aerial Vehicles (UAVs) in smart farming: A comprehensive review. Internet Things 2022, 18, 100187. [Google Scholar] [CrossRef]
- Cavalaris, C. Chapter 9—Challenges and opportunities for cost-effective use of unmanned aerial system in agriculture. In Unmanned Aerial Systems in Agriculture; Academic Press: Cambridge, MA, USA, 2023; pp. 197–229. [Google Scholar]
- Debauche, O.; Trani, J.-P.; Mahmoudi, S.; Manneback, P.; Bindelle, J.; Mahmoudi, S.A.; Guttadauria, A.; Lebeau, F. Data management and internet of things: A methodological review in smart farming. Internet Things 2021, 14, 100378. [Google Scholar] [CrossRef]
- Yang, C.; Guo, S.; Guo, Y. Development of a Novel Remote Controller for Interventional Surgical Robots. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 1964–1968. [Google Scholar]
- Seo, J.; Cho, J.H.; Cha, J.; Kim, C.; Kwon, O. Design and experimental evaluations of robot-assisted tele-echography system for remote ultrasound imaging. In Proceedings of the 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Republic of Korea, 28 June–1 July 2017; pp. 592–594. [Google Scholar]
- Geng, C.; Xie, Q.; Chen, L.; Li, A.; Qin, B. Study and Analysis of a Remote Robot-assisted Ultrasound Imaging System. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; pp. 389–393. [Google Scholar]
- Xue, Z.; Zeng, J. Formation Control Numerical Simulations of Geometric Patterns for Unmanned Autonomous Vehicles with Swarm Dynamical Methodologies. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009; pp. 477–482. [Google Scholar]
- Jin, Z.; Wang, C.; Liang, D.; Liang, Z.; Li, S. Robust cooperative output regulation for heterogeneous nonlinear multi-agent systems with an unknown exosystem subject to jointly connected switching networks. ISA Trans. 2023, 143, 59–78. [Google Scholar] [CrossRef]
- Mello, R.C.; Scheidegger, W.M.; Múnera, M.C.; Cifuentes, C.A.; Ribeiro, M.R.; Frizera-Neto, A. The PoundCloud framework for ROS-based cloud robotics: Case studies on autonomous navigation and human–robot interaction. Robot. Auton. Syst. 2022, 150, 103981. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, S.; Xiang, X.; Vasilijević, A.; Mišković, N.; Nađ, Ð. Cloud-based remote control framework for unmanned surface vehicles. IFAC-Pap. 2020, 53, 14564–14569. [Google Scholar] [CrossRef]
- Dawarka, V.; Bekaroo, G. Building and evaluating cloud robotic systems: A systematic review. Robot. Comput.-Integr. Manuf. 2022, 73, 102240. [Google Scholar] [CrossRef]
- Bodkhe, U.; Tanwar, S. Network management schemes for IoT environment towards 6G: A comprehensive review. Microprocess. Microsyst. 2023, 103, 104928. [Google Scholar] [CrossRef]
- Tomaszewski, L.; Kołakowski, R. Mobile Services for Smart Agriculture and Forestry, Biodiversity Monitoring, and Water Management: Challenges for 5G/6G Networks. Telecom 2023, 4, 67–99. [Google Scholar] [CrossRef]
- 3GPP. Service Requirements for the 5G System; Stage 1; Technical Standard TS 22.261, ver. 19.1.0, 3rd Generation Partnership Project; Sophia Antipolis: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3107 (accessed on 29 December 2023).
- Ranjha, A.; Kaddoum, G.; Dev, K. Facilitating URLLC in UAV-Assisted Relay Systems with Multiple-Mobile Robots for 6G Networks: A Prospective of Agriculture 4.0. IEEE Trans. Ind. Inform. 2022, 18, 4954–4965. [Google Scholar] [CrossRef]
- Polymeni, S.; Plastras, S.; Skoutas, D.N.; Kormentzas, G.; Skianis, C. The Impact of 6G-IoT Technologies on the Development of Agriculture 5.0: A Review. Electronics 2023, 12, 2651. [Google Scholar] [CrossRef]
- Zhu, A.; Zeng, Z.; Guo, S.; Lu, H.; Ma, M.; Zhou, Z. Game-theoretic robotic offloading via multi-agent learning for agricultural applications in heterogeneous networks. Comput. Electron. Agric. 2023, 211, 108017. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, R.; Qian, Y. Location-Based Hybrid Precoding Schemes and QoS-Aware Power Allocation for Radar-Aided UAV–UGV Cooperative Systems. IEEE Access 2022, 10, 50947–50958. [Google Scholar] [CrossRef]
- Ying, B.; Su, Z.; Xu, Q.; Ma, X. Game Theoretical Bandwidth Allocation in UAV-UGV Collaborative Disaster Relief Networks. In Proceedings of the 2021 IEEE 23rd Int Conf on High Performance Computing & Communications, HPCC 2021, Haikou, China, 20–22 December 2021. [Google Scholar]
- Messaoudi, K.; Oubbati, O.S.; Rachedi, A.; Bendouma, T. UAV-UGV-Based System for AoI minimization in IoT Networks. In Proceedings of the ICC 2023—IEEE International Conference on Communications, Rome, Italy, 28 May–1 June 2023. [Google Scholar]
- Wei, Y.; Qiu, H.; Liu, Y.; Du, J.; Pun, M.O. Unmanned aerial vehicle (UAV)-assisted unmanned ground vehicle (UGV) systems design, implementation and optimization. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 13–16 December 2017. [Google Scholar]
- Cheng, C.; Li, X.; Xie, L.; Li, L. A Unmanned Aerial Vehicle (UAV)/Unmanned Ground Vehicle (UGV) Dynamic Autonomous Docking Scheme in GPS-Denied Environments. Drones 2023, 7, 613. [Google Scholar] [CrossRef]
- Blümm, C.; Heller, C.; Weigel, R. SDR OFDM Waveform Design for a UGV/UAV Communication Scenario. J. Signal Process. Syst. Signal Image Video Technol. 2012, 69, 11–21. [Google Scholar] [CrossRef]
- Shen, Y.; Wei, C. Target tracking and enclosing via UAV/UGV cooperation using energy estimation pigeon-inspired optimization and switchable topology. Aircr. Eng. Aerosp. Technol. 2023, 95, 768–783. [Google Scholar] [CrossRef]
- Chang, B.R.; Tsai, H.-F.; Lyu, J.-L.; Huang, C.-F. IoT-connected Group Deployment of Unmanned Vehicles with Sensing Units: iUAGV System. Sens. Mater. 2021, 33, 1485–1499. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, H.; Tian, J.; Wang, J.; Su, Y. Biobjective UAV/UGV Collaborative Rendezvous Planning in Persistent Intelligent Task-Based Wireless Communication. Wirel. Commun. Mob. Comput. 2021, 9578783. [Google Scholar] [CrossRef]
- Yulong, D.; Bin, X.; Jie, C.; Hao, F.; Yangguang, Z.; Guanqiang, G.; Lihua, D. Path Planning of Messenger UAV in Air-ground Coordination. Ifac Pap. 2017, 50, 8045–8051. [Google Scholar] [CrossRef]
- Cao, H.; Zhao, H.; Jindal, A.; Aujla, G.S.; Yang, L. Gagangeet Singh Aujla and Longxiang Yang. Energy-Efficient Virtual Resource Allocation of Slices in Vehicles-Assisted B5G Networks. IEEE Trans. Green Commun. Netw. 2022, 6, 1408–1417. [Google Scholar] [CrossRef]
- Raja, G.; Manaswini, Y.; Vivekanandan, G.D.; Sampath, H.; Dev, K.; Bashir, A.K. AI-Powered Blockchain—A Decentralized Secure Multiparty Computation Protocol for IoV. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 865–870. [Google Scholar]
- Gad, A.R.; Nashat, A.A.; Barkat, T.M. Intrusion Detection System Using Machine Learning for Vehicular Ad Hoc Networks Based on ToN-IoT Dataset. IEEE Access 2021, 9, 142206–142217. [Google Scholar] [CrossRef]
- Gao, Y.; Wu, H.; Song, B.; Jin, Y.; Luo, X.; Zeng, X. A Distributed Network Intrusion Detection System for Distributed Denial of Service Attacks in Vehicular Ad Hoc Network. IEEE Access 2019, 7, 154560–154571. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Liu, Z.; Lee, H.; Khyam, M.O.; He, J.; Pesch, D.; Moessner, K.; Saad, W.; Poor, H.A. 6G for Vehicle-to-Everything (V2X) Communications: Enabling Technologies, Challenges, and Opportunities. Proc. IEEE 2022, 110, 712–734. [Google Scholar] [CrossRef]
- Yang, J.; Liu, S.; Su, H.; Tian, Y. Driving assistance system based on data fusion of multisource sensors for autonomous unmanned ground vehicles. Comput. Netw. 2021, 192, 108053. [Google Scholar] [CrossRef]
- Lv, H.; Wen, M.; Lu, R.; Li, J. An Adversarial Attack Based on Incremental Learning Techniques for Unmanned in 6G Scenes. IEEE Trans. Veh. Technol. 2021, 70, 5254–5264. [Google Scholar] [CrossRef]
- Liu, R.; Liu, A.; Qu, Z.; Xiong, N.N. An UAV-Enabled Intelligent Connected Transportation System with 6G Communications for Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2045–2059. [Google Scholar] [CrossRef]
- Németh, B.; Antal, Z.; Marosi, A.C.; Lovas, R.; Fazekas, M.; Gáspár, P. Vehicle Control with Cloud-aided Learning Feature: An Implementation on Indoor Platform. IFAC-Pap. 2022, 55, 227–232. [Google Scholar] [CrossRef]
- Chen, H.; Liu, J.; Wang, J.; Xun, Y. Towards secure intra-vehicle communications in 5G advanced and beyond: Vulnerabilities, attacks and countermeasures. Veh. Commun. 2023, 39, 100548. [Google Scholar] [CrossRef]
- Su, Y.-S.; Huang, H.; Daim, T.; Chien, P.-W.; Peng, R.-L.; Akgul, A.K. Assessing the technological trajectory of 5G-V2X autonomous driving inventions: Use of patent analysis. Technol. Forecast. Soc. Change 2023, 196, 122817. [Google Scholar] [CrossRef]
- Alamgir, M.S.; Kelley, B. Fixed Wing UAV-based Non-Terrestrial Networks for 5G millimeter wave Connected Vehicles. In Proceedings of the 2023 IEEE 13th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–11 March 2023; pp. 1167–1173. [Google Scholar]
- Demir, U.; Toker, C.; Ekici, Ö. Energy-Efficient Deployment of UAV in V2X Network Considering Latency and Backhaul Issues. In Proceedings of the 2020 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom), Odessa, Ukraine, 26–29 May 2020; pp. 1–6. [Google Scholar]
- Arif, M.; Hasna, M.O. Analysis of fluctuations of antenna pattern in U-V2X communications. Phys. Commun. 2023, 58, 102066. [Google Scholar] [CrossRef]
- Zhang, R.; Lu, R.; Cheng, X.; Wang, N.; Yang, L. Caching and File Sharing in V2X Networks. IEEE Trans. Commun. 2021, 69, 3930–3942. [Google Scholar] [CrossRef]
- Traspadini, A.; Giordani, M.; Zorzi, M. UAV/HAP-Assisted Vehicular Edge Computing in 6G: Where and What to Offload? In Proceedings of the 2022 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), Grenoble, France, 7–10 June 2022; pp. 178–183. [Google Scholar]
- Hakak, S.; Gadekallu, T.R. Praveen Kumar Reddy Maddikunta, Swarna Priya Ramu, Parimala M, Chamitha De Alwis, Madhusanka Liyanage, Autonomous vehicles in 5G and beyond: A survey. Veh. Commun. 2023, 39, 100551. [Google Scholar]
- Singh, M.P.; Singh, A.; Aujla, G.S.R.; Bali, S.; Jindal, A. Referenced Blockchain Approach for Road Traffic Monitoring in a Smart City using Internet of Drones. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 1–6. [Google Scholar]
- Alioua, A.; Djeghri, H.-e.; Cherif, M.E.T.; Senouci, S.-M.; Sedjelmaci, H. UAVs for traffic monitoring: A sequential game-based computation offloading/sharing approach. Comput. Netw. 2020, 177, 107273. [Google Scholar] [CrossRef]
- Liu, Y.; Li, W.; Lu, Q.; Wang, J.; Shen, Y. Relative Localization of Ground Vehicles Using Non-Terrestrial Networks. In Proceedings of the 2019 IEEE/CIC International Conference on Communications Workshops in China (ICCC Workshops), Changchun, China, 11–13 August 2019; pp. 93–97. [Google Scholar]
- Testi, E.; Favarelli, E.; Giorgetti, A. Reinforcement Learning for Connected Autonomous Vehicle Localization via UAVs. In Proceedings of the 2020 IEEE International Workshop on Metrology for Agriculture and Forestry (Metroagrifor), Trento, Italy, 4–6 November 2020; pp. 13–17. [Google Scholar]
- Wang, X.; Bian, Y.; Qin, X.; Hu, M.; Xu, B.; Xie, G. Finite-time Platoon Control of Connected and Automated Vehicles with Mismatched Disturbances. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 5613–5618. [Google Scholar]
- Sun, Y.; Zheng, K.; Tang, Y. Control Efficient Power Allocation of Uplink NOMA in UAV-Aided Vehicular Platooning. IEEE Access 2021, 9, 139473–139488. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, J.; Tian, D.; Sheng, Z.; Duan, X.; Qu, G.; Zhao, D. Joint Optimization of Resource Scheduling and Mobility for UAV-Assisted Vehicle Platoons. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (Vtc2021-Fall), Norman, OK, USA, 27–30 September 2021. [Google Scholar]
- Liu, Y.; Zhou, J.; Tian, D.; Sheng, Z.; Duan, X.; Qu, G.; Leung, V.C.M. Joint Communication and Computation Resource Scheduling of a UAV-Assisted Mobile Edge Computing System for Platooning Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 8435–8450. [Google Scholar] [CrossRef]
- Zhao, J.; Nie, Y.; Zhang, H.; Yu, F.R. A UAV-Aided Vehicular Integrated Platooning Network for Heterogeneous Resource Management. IEEE Trans. Green Commun. Netw. 2023, 7, 512–521. [Google Scholar] [CrossRef]
- Spampinato, L.; Tarozzi, A.; Buratti, C.; Marini, R. DRL Path Planning for UAV-Aided V2X Networks: Comparing Discrete to Continuous Action Spaces. In Proceedings of the ICASSP 2023—2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 4–10 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Cao, Y.; Xu, S.; Liu, J.; Kato, N. Toward Smart and Secure V2X Communication in 5G and Beyond: A UAV-Enabled Aerial Intelligent Reflecting Surface Solution. IEEE Veh. Technol. Mag. 2022, 17, 66–73. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, H.; Dong, C.; Chen, Y. A centralized relaxation strategy for cooperative lane change in a connected environment. Phys. A: Stat. Mech. Its Appl. 2023, 624, 128934. [Google Scholar] [CrossRef]
- Benyahya, M.; Collen, A.; Nijdam, N.A. Analyses on standards and regulations for connected and automated vehicles: Identifying the certifications roadmap. Transp. Eng. 2023, 14, 100205. [Google Scholar] [CrossRef]
- Mokhtarian, A.; Kampmann, A.; Lueer, M.; Kowalewski, S.; Alrifaee, B. A Cloud Architecture for Networked and Autonomous Vehicles. IFAC-Pap. 2021, 54, 233–239. [Google Scholar] [CrossRef]
- Haider, S.I.; Tan, S. V2X Reliability Enhancement Through NLOS Links from IRS Random Scattering. In Proceedings of the 2023 International Applied Computational Electromagnetics Society Symposium (ACES-China), Hangzhou, China, 15–18 August 2023; pp. 1–3. [Google Scholar]
- Saafi, S.; Vikhrova, O.; Fodor, G.; Hosek, J.; Andreev, S. AI-Aided Integrated Terrestrial and Non-Terrestrial 6G Solutions for Sustainable Maritime Networking. IEEE Netw. 2022, 36, 183–190. [Google Scholar] [CrossRef]
- Zhao, C.; Thies, P.; Lars, J.; Cowles, J. ROV launch and recovery from an unmanned autonomous surface vessel—Hydrodynamic modelling and system integration. Ocean. Eng. 2021, 232, 109019. [Google Scholar] [CrossRef]
- Cui, Z.; Guan, W.; Luo, W.; Zhang, X. Intelligent navigation method for multiple marine autonomous surface ships based on improved PPO algorithm. Ocean. Eng. 2023, 287 Pt 1, 115783. [Google Scholar] [CrossRef]
- Zhao, W.; Xia, Y.; Zhai, D.-H.; Cui, B. Adaptive event-triggered coordination control of unknown autonomous underwater vehicles under communication link faults. Automatica 2023, 158, 111277. [Google Scholar] [CrossRef]
- Nomikos, N.; Gkonis, P.K.; Bithas, P.S.; Trakadas, P. A Survey on UAV-Aided Maritime Communications: Deployment Considerations, Applications, and Future Challenges. IEEE Open J. Commun. Soc. 2023, 4, 56–78. [Google Scholar] [CrossRef]
- Cao, H.; Yang, T.; Yin, Z.; Sun, X.; Li, D. Topological optimization algorithm for HAP assisted multi-unmanned ships communication. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 15 February 2021; pp. 1–5. [Google Scholar]
- Huang, Z.; Xue, K.; Wang, P.; Xu, Z. A nested-ring exact algorithm for simple basic group communication topology optimization in Multi-USV systems. Ocean. Eng. 2022, 266 Pt 5, 113239. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, D.; Wang, J. Formation control for multiple heterogeneous unmanned aerial vehicles and unmanned surface vessels system. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 4920–4925. [Google Scholar]
- Ma, Y.; Zhao, Y.J.; Qi, X.; Zheng, Y.Z.; Gan, R.Z. Cooperative communication framework design for the unmanned aerial vehicles-unmanned surface vehicles formation. Adv. Mech. Eng. 2018, 10, 1687814018773668. [Google Scholar] [CrossRef]
- Zhang, G.; Bian, W.; Li, J.; Zhang, W. Robust adaptive synchronized event-triggered formation control of USVs with the fault amendment strategy. Ocean. Eng. 2023, 281, 114832. [Google Scholar] [CrossRef]
- Liu, H.; Weng, P.; Tian, X.; Mai, Q. Distributed adaptive fixed-time formation control for UAV-USV heterogeneous multi-agent systems. Ocean. Eng. 2023, 267, 113240. [Google Scholar] [CrossRef]
- Xue, K.; Rodríguez-Piñeiro, J.; Yu, Y.; Hong, J.; Yin, X.; Shunqin, X. Performance and Reliability of 5G Communications for USV-UAV Critical Applications. In Proceedings of the 2023 17th European Conference on Antennas and Propagation (EuCAP), Florence, Italy, 26–31 March 2023; pp. 1–5. [Google Scholar]
- Li, W.; Ge, Y.; Guan, Z.; Gao, H.; Feng, H. NMPC-based UAV-USV cooperative tracking and landing. J. Frankl. Inst. 2023, 360, 7481–7500. [Google Scholar] [CrossRef]
- Deng, T.; Xu, X.; Ding, Z.; Xiao, X.; Zhu, M.; Peng, K. Automatic collaborative water surface coverage and cleaning strategy of UAV and USVs. Digit. Commun. Netw. 2022. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, W.; Liu, J.; Sun, C. Cooperative USV–UAV marine search and rescue with visual navigation and reinforcement learning-based control. ISA Trans. 2023, 137, 222–235. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Li, R.; Li, J.; Zou, M.; Huang, Z. Cooperative unmanned surface vehicles and unmanned aerial vehicles platform as a tool for coastal monitoring activities. Ocean. Coast. Manag. 2023, 232, 106421. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, Y.; Liu, J. Secure Task Offloading and Resource Scheduling in Maritime Edge Computing Systems. In Proceedings of the 2023 IEEE/CIC International Conference on Communications in China (ICCC), Dalian, China, 10–12 August 2023; pp. 1–6. [Google Scholar]
- Wang, J.-B.; Zeng, C.; Ding, C.; Zhang, H.; Lin, M.; Wang, J. Unmanned Surface Vessel Assisted Maritime Wireless Communication Toward 6G: Opportunities and Challenges. IEEE Wirel. Commun. 2022, 29, 72–79. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, L.; Song, D.; Wu, Q.M.J. A novel path planning method for multiple USVs to collect seabed-based data. Ocean. Eng. 2023, 269, 113510. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y. Data harvesting in uncharted waters: Interactive learning empowered path planning for USV-assisted maritime data collection under fully unknown environments. Ocean. Eng. 2023, 287, 115781. [Google Scholar] [CrossRef]
- Yang, Y.; He, D.; Vijayakumar, P.; Gupta, B.B.; Xie, Q. An Efficient Identity-Based Aggregate Signcryption Scheme with Blockchain for IoT-Enabled Maritime Transportation System. IEEE Trans. Green Commun. Netw. 2022, 6, 1520–1531. [Google Scholar] [CrossRef]
- Zeng, C.; Wang, J.-B.; Ding, C.; Zhang, P.; Zhang, H.; Min, L. Joint Optimization of Trajectory and Beamforming for USV-Assisted Maritime Wireless Network Coexisting with Satellite Network. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 1865–1870. [Google Scholar] [CrossRef]
- Yin, H.; Li, Y.; Xing, F.; Wu, B.; Zhou, Z.; Zhang, W.; Acoustic, H. Wireless Optical and Fiber-optic Underwater Cellular Mobile Communication Networks. In Proceedings of the 2018 IEEE 18th International Conference on Communication Technology (ICCT), Chongqing, China, 8–11 October 2018; pp. 721–726. [Google Scholar] [CrossRef]
- Dao, N.-N.; Tu, N.H.; Thanh, T.T. Vo Nguyen Quoc Bao, Woongsoo Na, Sungrae Cho, Neglected infrastructures for 6G—Underwater communications: How mature are they? J. Netw. Comput. Appl. 2023, 213, 103595. [Google Scholar] [CrossRef]
- Yang, Y.; Xiao, Y.; Li, T. A Survey of Autonomous Underwater Vehicle Formation: Performance, Formation Control, and Communication Capability. IEEE Commun. Surv. Tutor. 2021, 23, 815–841. [Google Scholar] [CrossRef]
- Chen, Y.-L.; Ma, X.-W.; Bai, G.-Q.; Sha, Y.; Liu, J. Multi-autonomous underwater vehicle formation control and cluster search using a fusion control strategy at complex underwater environment. Ocean. Eng. 2020, 216, 108048. [Google Scholar] [CrossRef]
- Yang, X.; Wang, W.; Huang, P. Distributed optimal consensus with obstacle avoidance algorithm of mixed-order UAVs–USVs–UUVs systems. ISA Trans. 2020, 107, 270–286. [Google Scholar] [CrossRef] [PubMed]
- Yuan, M.; Li, Y.; Li, Y.; Pang, S.; Zhang, J. A fast way of single-beacon localization for AUVs. Appl. Ocean. Res. 2022, 119, 103037. [Google Scholar] [CrossRef]
- Xu, B.; Fei, Y.; Wang, X.; Tang, J.; Razzaqi, A.A. Optimal topology design of multi-target AUVs for 3D cooperative localization formation based on angle of arrival measurement. Ocean. Eng. 2023, 271, 113758. [Google Scholar] [CrossRef]
- Qiu, F.; Zhang, W. AUV-Aided joint time synchronization and localization of underwater target with propagation speed uncertainties. Ocean. Eng. 2023, 283, 115060. [Google Scholar] [CrossRef]
- Jiang, L.; Gao, W.; Li, Y.; Pan, M.; Mu, S. Cooperative localization for master–salve multi-AUVs based on range measurements. Phys. Commun. 2023, 61, 102217. [Google Scholar] [CrossRef]
- Lv, Z.; Bai, Y.; Jin, J.; Wang, H.; Ren, C. Analysis of wave fluctuation on underwater acoustic communication based USV. Appl. Acoust. 2021, 175, 107820. [Google Scholar] [CrossRef]
- Li, C.; Li, J.; Zhang, G.; Chen, T. IROA-based LDPC-Lévy method for target search of multi AUV–USV system in unknown 3D environment. Ocean. Eng. 2023, 286, 115648. [Google Scholar] [CrossRef]
- Deebak, B.D.; Al-Turjman, F. Chapter One—Aerial and underwater drone communication: Potentials and vulnerabilities. In Drones in Smart-Cities, Al-Turjman, F., Ed.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 1–26. [Google Scholar]
- Li, Y.; Qiu, H.; Chen, X.; Fu, J.; Musa, M.; Li, X. Spatial correlation analysis of imaging MIMO for underwater visible light communication. Opt. Commun. 2019, 443, 221–229. [Google Scholar] [CrossRef]
- IF, A.; Wang, P.; Lin, S.-C. SoftWater: Software-defined networking for next-generation underwater communication systems. Ad Hoc Netw. 2016, 46, 1–11. [Google Scholar]
- Qu, F.; Qian, J.; Wang, J.; Lu, X.; Zhang, M.; Bai, X.; Ran, Z.; Tu, X.; Liu, Z.; Wei, Y. Cross-Medium Communication Combining Acoustic Wave and Millimeter Wave: Theoretical Channel Model and Experiments. IEEE J. Ocean. Eng. 2022, 47, 483–492. [Google Scholar] [CrossRef]
- Kumar, A.; Ahuja, N.J.; Thapliyal, M.; Dutt, S.; Kumar, T. Diego Augusto De Jesus Pacheco, Charalambos Konstantinou, Kim-Kwang Raymond Choo, Blockchain for unmanned underwater drones: Research issues, challenges, trends and future directions. J. Netw. Comput. Appl. 2023, 215, 103649. [Google Scholar] [CrossRef]
- Liu, X.; Chai, Z.-Y.; Li, Y.-L.; Cheng, Y.-Y.; Zeng, Y. Multi-objective deep reinforcement learning for computation offloading in UAV-assisted multi-access edge computing. Inf. Sci. 2023, 642, 119154. [Google Scholar] [CrossRef]
- Hassan, S.S.; Tun, Y.K.; Saad, W.; Han, Z.; Hong, C.S. Blue Data Computation Maximization in 6G Space-Air-Sea Non-Terrestrial Networks. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar]
- Shi, J.; Li, C.; Guan, Y.; Cong, P.; Li, J. Multi-UAV-assisted computation offloading in DT-based networks: A distributed deep reinforcement learning approach. Comput. Commun. 2023, 210, 217–228. [Google Scholar] [CrossRef]



| Literature | Topics | Contributions | Year |
|---|---|---|---|
| [32] | UAV Base Staion | Investigated a distributed framework based on DRL to control and optimize UAV base stations considering ground users’ fairness | 2021 |
| [33] | UAV Base Staion | Proposed a flow-level model for UAV base station network and a DRL-optimizing method for network traffic balancing based on the realistic UAV radio model. | 2019 |
| [34] | UAV Base Staion | Demonstrated a circle trajectory setup for multiple ground uses coverage. | 2020 |
| [35] | UAV Base Staion | Designed a deep Q learning network and greedy algorithm-based UAV trajectory optimization paradigm for unevenly distributed ground users. | 2021 |
| [36] | UAV Base Staion | Emphasized a multi-target coverage dynamic trajectory optimization scheme utilizing knowledge-incorporated approach | 2021 |
| [37] | UAV Relay | Proposed an iterative solution for joint optimization of UAV trajectory, power consumption and time-slot assignment. | 2019 |
| [38] | UAV Relay | Considered a path planning and power consumption optimization paradigm for a space-air-ground integrated relay network in a non-orthogonal multiple access scheme | 2018 |
| [39] | UAV Relay | Investigated a novel solution for trajectory design and transmitting power minimization for a UAV-assisted relay | 2021 |
| [40] | UAV Relay | The paper proposed an efficient algorithm designed for UAV relay’s three-dimensional trajectory optimization in order to achieve higher throughput. | 2021 |
| [41] | UAV Relay | The paper studied a multi-UAV trajectory optimization framework in which UAVs acted as both aerial base stations and wireless relays. | 2022 |
| [44] | UAV User Equipment | The paper proposed an analytical model to demonstrate the influence of trajectory and altitude on the quality of service in UAV aerial cellular users | 2020 |
| [45] | UAV User Equipment | The paper investigated an iterative method for trajectory planning to minimize the time to fulfill the task and overall power consumption for UAV aerial users | 2021 |
| [46] | UAV User Equipment | The paper proposed an online trajectory optimizing scheme for minimal power consumption based on outage probability map reconstructed from sparse sampling. | 2023 |
| [47] | UAV User Equipment | The paper considered a DRL-based UAV user optimization method considering impact factors of UAV power, flight trajectory, and antenna pattern. | 2022 |
| [48] | UAV User Equipment | The paper considered a cellular-connected UAV for synthetic aperture radar sensing tasks using successive convex approximation. | 2022 |
| [49] | UAV User Equipment | The paper proposed a dynamic programming algorithm to optimize trajectories of cellular-connected UAVs for communication enhancement | 2020 |
| [50] | UAV User Equipment | The paper reported a path-planning method for task-critical missions in which connectivity maintenance is of utmost importance. | 2022 |
| [51] | UAV User Equipment | This work reported a UAV curvature design for UAV users with fixed start and final locations. | 2019 |
| [52] | UAV User Equipment | This study emphasized the role of path planning in the effort of interference cancellation. | 2022 |
| Unmanned Autonomous Intelligent System | Application | Communication Requirements |
|---|---|---|
| UGV | Command and Control | Ultra-low latency |
| Perception | High data rate | |
| Data Offloading | High data rate Low latency | |
| UAV | Flight Control | Ultra-low latency |
| UAV Traffic Management | Low latency | |
| Object Delivery | Low latency | |
| Mobile Edge Computing | Low latency High data rate | |
| others | Monitor and Survey | High data rate |
| Reconnaissance | High data rate | |
| Swarm Coordination | Low latency | |
| Formation Control | Low latency |
| Use Case | Parameters | ||||
|---|---|---|---|---|---|
| Exchange Intensity | Exchange Type | Data Rate | Max. Delay | Reliability | |
| Command and control | high | stream | 28 kbps | 20 ms | 99.9% |
| Video streaming of FPV | high | stream | 120 Mbps | 40 ms | 99.99% |
| Offloading processing tasks | high | burst | 1.1 Gbps | 2 ms | 99.9% |
| Literature | Topics | Contributions | NTN Communication Type |
|---|---|---|---|
| [162] | Multi-USV Control | An integrated communication framework for terrestrial, sea and HAP for multi-USV control. | HAP–USV |
| [164] | Multi-USV Communication | Multi-USV group communication scheme with nested topology | USV–USV |
| [166] | USV Formation Control | Cooperative communication framework design considering varying topology | UAV–USV |
| [167] | USV Formation Control | Event-triggered formation controller for lower communication power consumption | UAV–USV |
| [168] | USV Formation Control | Dynamic event-triggered control scheme for fixed time formation consensus. | UAV–USV |
| [169] | UAV-USV Cooperation | Performance and reliability evaluation of communications for USV–UAV cooperation tasks | UAV–USV |
| [170] | UAV-USV Cooperation | UAV–USV cooperative tracking and landing scheme using model-based control. | UAV–USV |
| [171] | UAV-USV Cooperation | Collaborative surface coverage of oceanic area utilizing UAV and USV | UAV–USV |
| [172] | UAV-USV Cooperation | USV–UAV marine cooperative search and control by means of visual information | UAV–USV |
| MeasurementPoint | Type | Distance to UAV (M) | Throughput (Mbps) | Downlink RSRP (dBm) | Downlink SINR (dB) | Time Delay (ms) |
|---|---|---|---|---|---|---|
| A | Uplink | 3490.17 | 26.99 | −88.13 | 28.81 | / |
| Ping | 3707.13 | / | −97.63 | 22.31 | 323 | |
| Uplink | 3705.50 | 10.82 | −101.81 | 14.81 | / | |
| Downlink | 3654.38 | 697.34 | −83.13 | 33.69 | / | |
| Ping | 3473.81 | / | −94.50 | 24.69 | 23 | |
| Uplink | 3418.66 | 17.23 | −91.50 | 25.19 | / | |
| Ping | 3500.57 | / | −85.38 | 26.31 | 31 | |
| Downlink | 3418.87 | 756.49 | −84.06 | 35.81 | / | |
| B | Ping | 3815.15 | / | −82.23 | 34.37 | 27 |
| Downlink | 3600.85 | 707.65 | −85.73 | 28.99 | / | |
| Uplink | 3570.03 | 40.60 | −76.89 | 39.07 | / | |
| C | Uplink | 3415.97 | 22.02 | −78.29 | 39.34 | / |
| Downlink | 3744.77 | 362.91 | −99.41 | 24.50 | / | |
| Ping | 4049.63 | / | −98.69 | 25.06 | 16 |
| Application | Item | Results |
|---|---|---|
| Multi frequency integration | Network edge rate | 14 Mbps |
| Peak rate | 744 Mbps | |
| Average delay | 21 ms | |
| Total system bandwidth | 240 MHz | |
| UE coverage | Coverage | 36 km2 (on demand) |
| Number of UEs | 41 (>10 Mbps) | |
| System outage probability | Less than 0.04% |
| Application | Item | Results |
|---|---|---|
| Multi robot control | Robot control instruction delay | less than 20 ms |
| Robot control range | 50 km | |
| High-definition video streaming | Channels supported of 4k video stream | 16 |
| Video stream delay | less than 70 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Guo, Y.; Gao, Y. Unmanned Autonomous Intelligent System in 6G Non-Terrestrial Network. Information 2024, 15, 38. https://doi.org/10.3390/info15010038
Wang X, Guo Y, Gao Y. Unmanned Autonomous Intelligent System in 6G Non-Terrestrial Network. Information. 2024; 15(1):38. https://doi.org/10.3390/info15010038
Chicago/Turabian StyleWang, Xiaonan, Yang Guo, and Yuan Gao. 2024. "Unmanned Autonomous Intelligent System in 6G Non-Terrestrial Network" Information 15, no. 1: 38. https://doi.org/10.3390/info15010038
APA StyleWang, X., Guo, Y., & Gao, Y. (2024). Unmanned Autonomous Intelligent System in 6G Non-Terrestrial Network. Information, 15(1), 38. https://doi.org/10.3390/info15010038