
Recognition of House Structures from Complicated Electrical Plan Images


Abstract
:1. Introduction
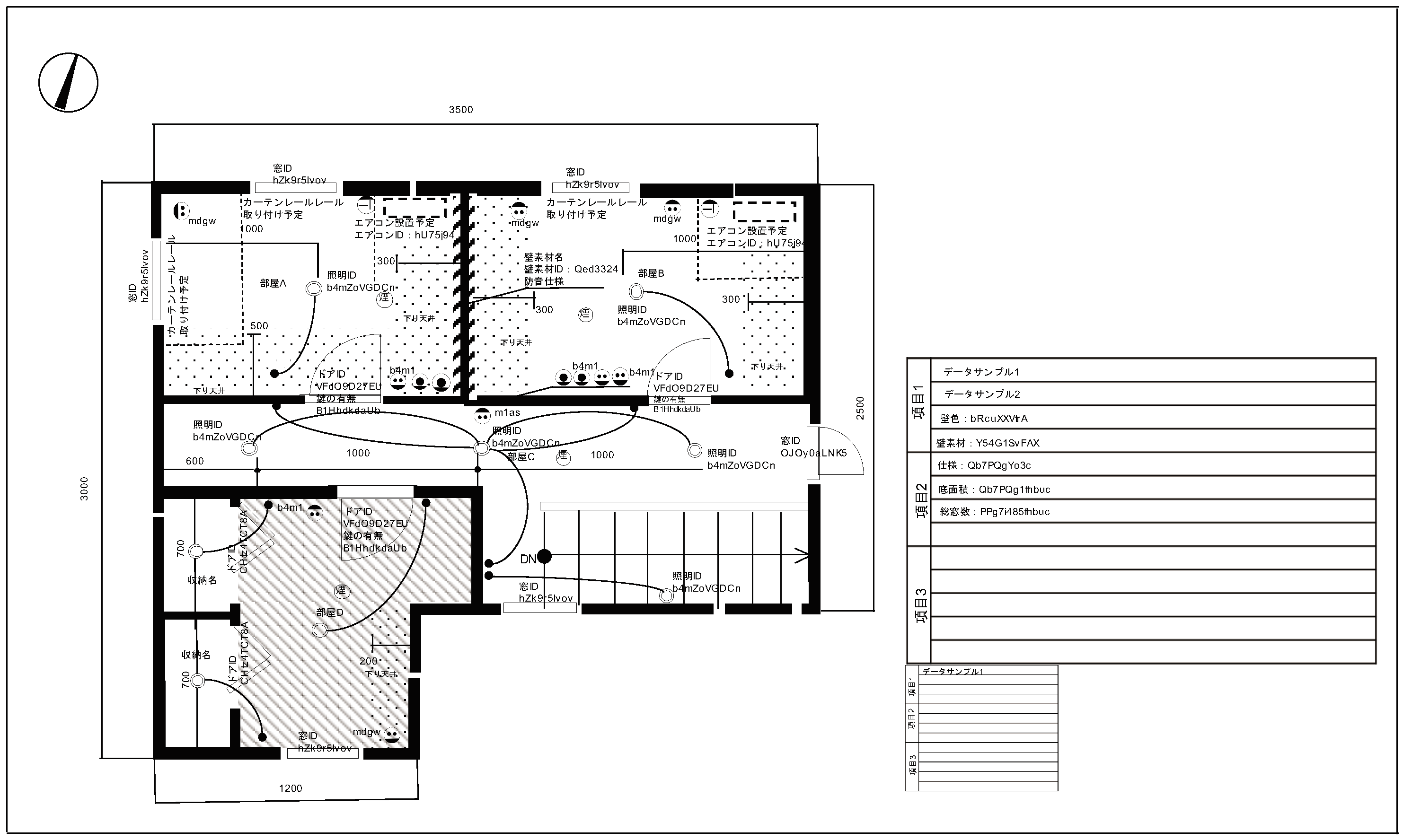
- We propose a method to handle electrical plan images, which are often chaotic with too much information in limited spaces. Due to this feature, our method outperforms the existing methods regarding recognition accuracy.
- The method can also extract semantic information, such as room names, wall and ceiling socket locations and types, and the room structure (walls, doors, and room regions).
- We have conducted experiments using real 544 electrical plans provided by one of the top house builders in Japan and confirmed the accuracy and efficacy of the method.
2. Related Work
2.1. Floor Plan Image Analysis and Recognition
2.2. Our Contributions
3. Method Overview
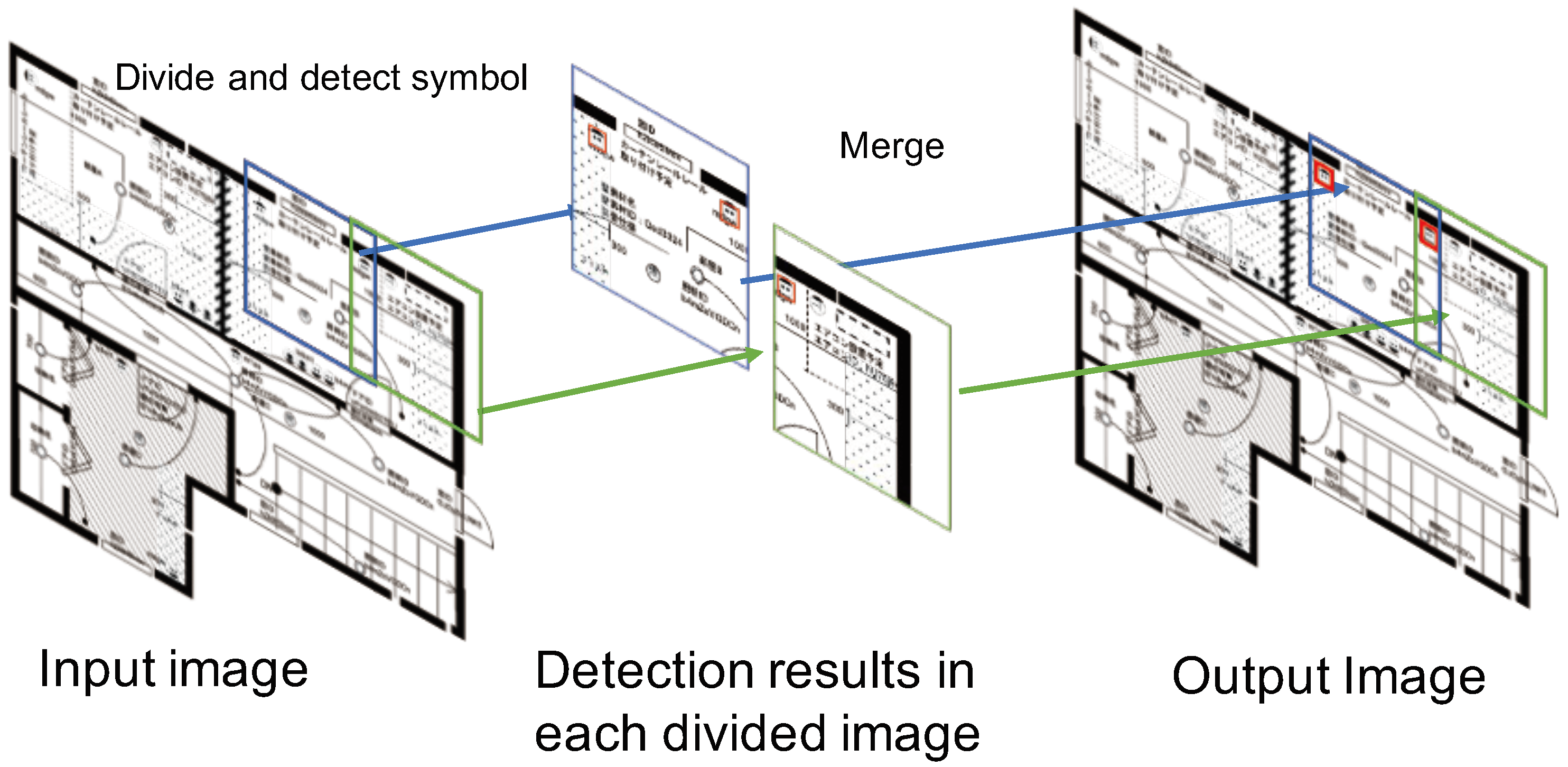
3.1. Procedure
3.2. Electrical Plan
4. Design Details
4.1. Identifying Floor Plan Area
4.2. Room Recognition
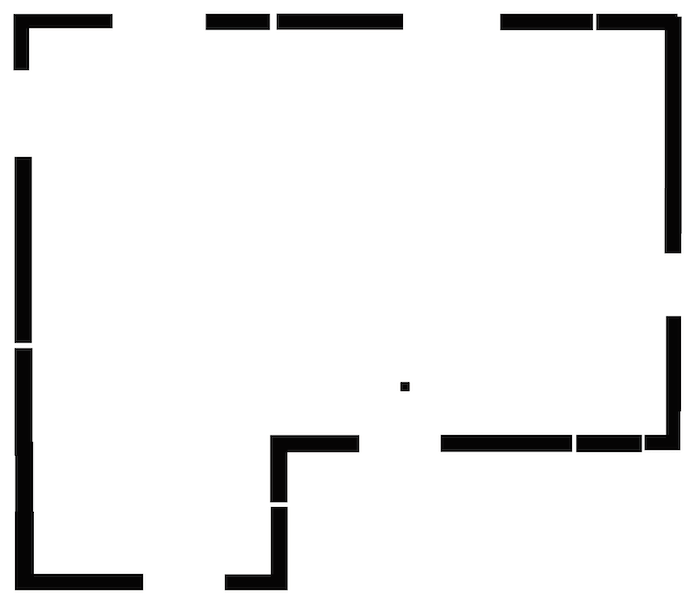
4.2.1. Exterior and Interior Walls
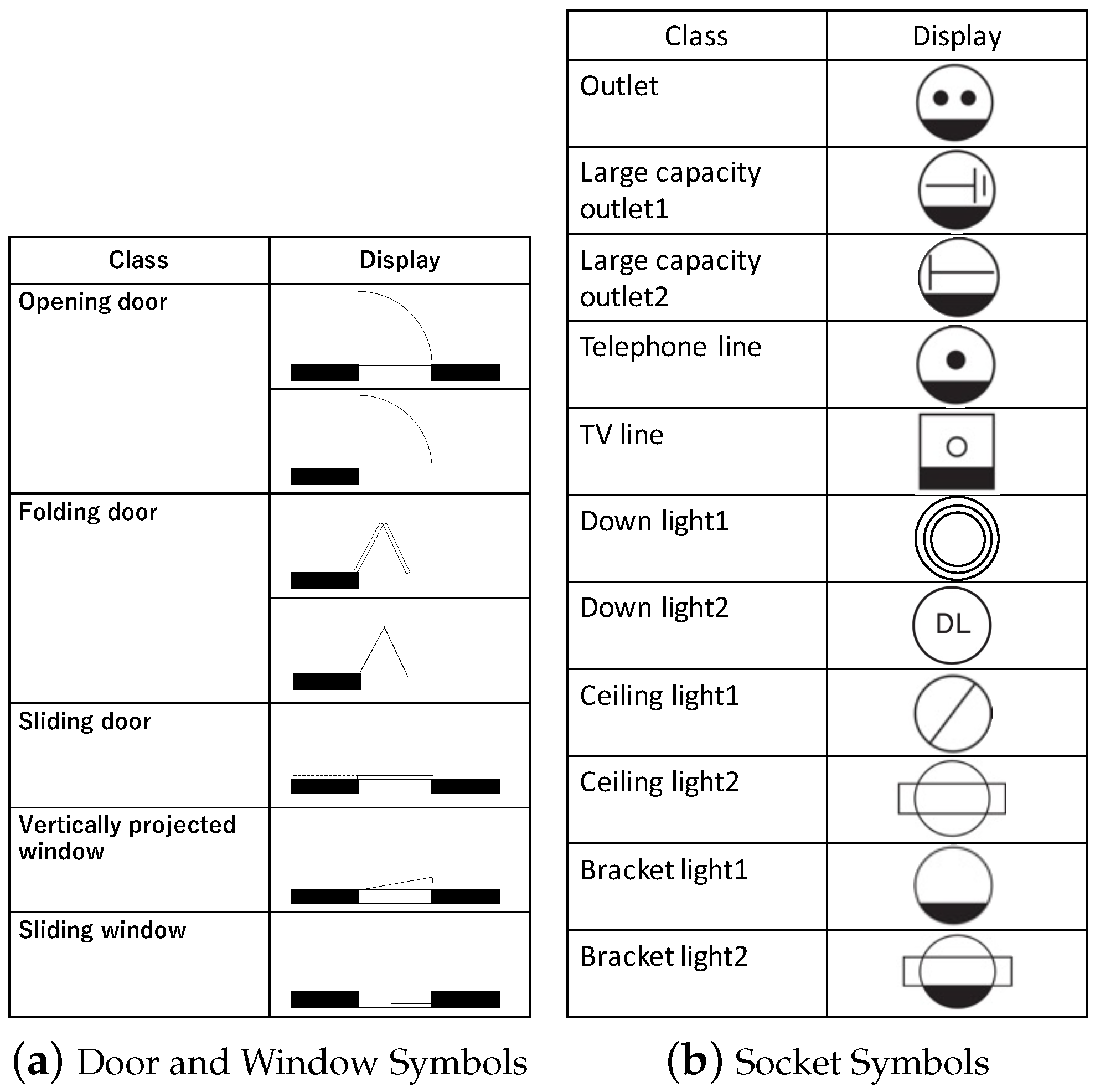
4.2.2. Window and Door
- Blank space between two walls with equal thicknesses in a straight line;
- Blank space between a wall and a doorframe (a ridge on a wall that is found by line segment detection);
- Blank space between doorframes.
4.2.3. Room Region
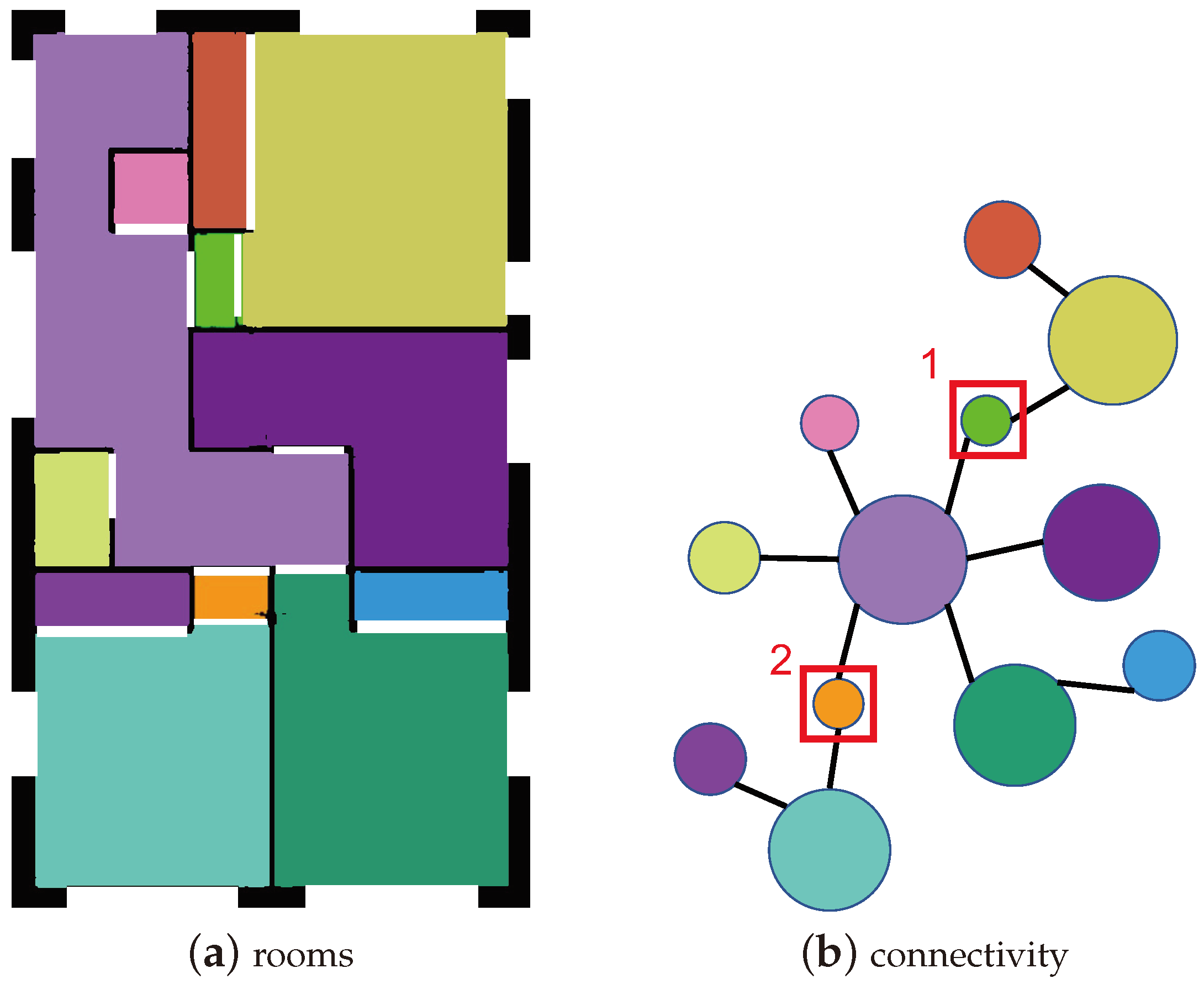
4.3. Finding Room Connectivity
4.4. Room Name Identification
4.4.1. String Detection, OCR, and List Matching
4.4.2. Inference from Structural Information
- A room whose type is washroom/bathroom can have three names: “toilet”, “bathroom”, and “washroom”. Among them, “washroom” is the only one with a connection with multiple rooms, so the one with a connection with multiple rooms is called “washroom”. A “bathroom” is often connected to a room named “washroom” or “laundry room”, so the largest adjoining room with these names is “ bathroom”. Let the last one be “toilet”.
- Next, a room with only one adjacent room is considered a “closet” or “Western-style room”. (There are two room types in traditional Japanese houses: Japanese and Western style.)”Since there is also a large closet, the rooms smaller than the threshold are named “closet”, the ones that are large and of type closet are “closet”, and the others are “bedroom”.
- Find a room adjacent to more than one room, such as living room and toilet except for closet, and label the name “hall”.
- Name the rest of the rooms “Western-style rooms”.
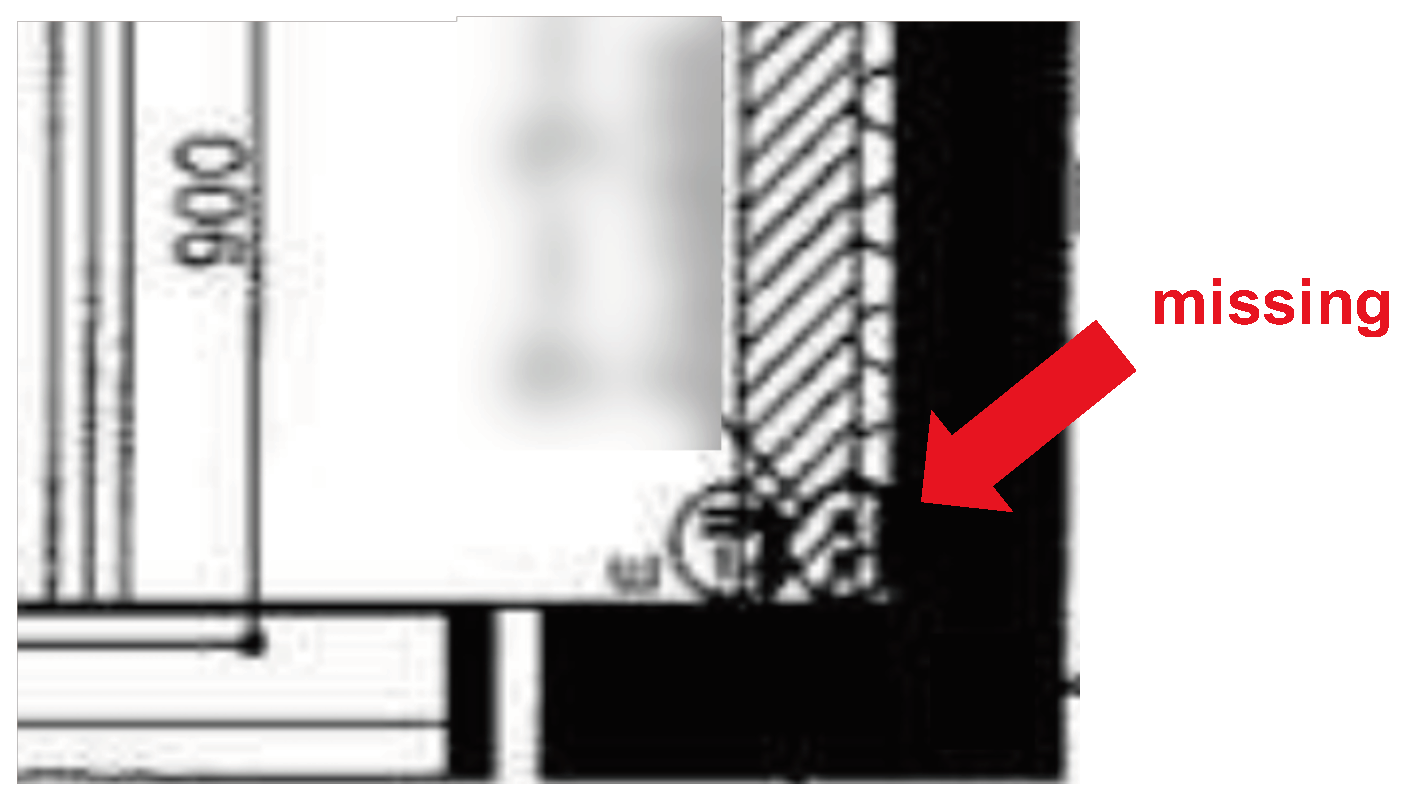
4.5. Wall and Ceiling Socket Extraction
5. Evaluation
5.1. Comparison Method
5.2. Evaluation Metrics
5.3. Wall, Door and Window Detection Result
5.4. Room Region Detection and Room Name Identification Results
5.5. Room Connectivity Estimation Result
5.6. Wall and Ceiling Socket Detection Result
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dodge, S.; Xu, J.; Stenger, B. Parsing floor plan images. In Proceedings of the International Conference on Machine Vision Applications (MVA), Nagoya, Japan, 8–12 May 2017; pp. 358–361. [Google Scholar]
- Zhu, J.; Zhang, H.; Wen, Y. A new reconstruction method for 3D buildings from 2D vector floor plan. Comput.-Aided Des. Appl. 2014, 11, 704–714. [Google Scholar] [CrossRef]
- Sharma, D.; Gupta, N.; Chattopadhyay, C.; Mehta, S. DANIEL: A Deep Architecture for Automatic Analysis and Retrieval of Building Floor Plans. In Proceedings of the 2017 14th IAPR International Conference on Document Analysis and Recognition (ICDAR), Kyoto, Japan, 9–15 November 2017; Volume 1, pp. 420–425. [Google Scholar] [CrossRef]
- Kato, N.; Yamasaki, T.; Aizawa, K.; Ohama, T. Users’ preference prediction of real estate properties based on floor plan analysis. IEICE Trans. Inf. Syst. 2020, 103, 398–405. [Google Scholar] [CrossRef]
- Zeng, Z.; Li, X.; Yu, Y.K.; Fu, C.W. Deep Floor Plan Recognition Using a Multi-Task Network with Room-Boundary-Guided Attention. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9096–9104. [Google Scholar]
- Fletcher, L.A.; Kasturi, R. A robust algorithm for text string separation from mixed text/graphics images. IEEE Trans. Pattern Anal. Mach. Intell. 1988, 10, 910–918. [Google Scholar] [CrossRef]
- Ahmed, S.; Weber, M.; Liwicki, M.; Dengel, A. Text/graphics segmentation in architectural floor plans. In Proceedings of the International Conference on Document Analysis and Recognition, Beijing, China, 18–21 September 2011; pp. 734–738. [Google Scholar]
- Ravagli, J.; Ziran, Z.; Marinai, S. Text recognition and classification in floor plan images. In Proceedings of the 2019 International Conference on Document Analysis and Recognition Workshops (ICDARW), Sydney, Australia, 22–25 September 2019; IEEE: Piscataway, NJ, USA, 2019; Volume 1, pp. 1–6. [Google Scholar]
- Ah-Soon, C.; Tombre, K. Variations on the analysis of architectural drawings. In Proceedings of the Fourth International Conference on Document Analysis and Recognition, Ulm, Germany, 18–20 August 1997; IEEE: Piscataway, NJ, USA, 1997; Volume 1, pp. 347–351. [Google Scholar]
- De las Heras, L.P.; Mas, J.; Valveny, E.; Sanchez, G. Wall patch-based segmentation in architectural floorplans. In Proceedings of the International Conference on Document Analysis and Recognition, San Jose, CA, USA, 21–26 August 2011; pp. 1270–1274. [Google Scholar]
- Macé, S.; Locteau, H.; Valveny, E.; Tabbone, S. A system to detect rooms in architectural floor plan images. In Proceedings of the IAPR International Workshop on Document Analysis Systems, Boston, MA, USA, 9–11 June 2010; pp. 167–174. [Google Scholar]
- Ahmed, S.; Liwicki, M.; Weber, M.; Dengel, A. Improved automatic analysis of architectural floor plans. In Proceedings of the International Conference on Document Analysis and Recognition, Beijing, China, 18–21 September 2011; pp. 864–869. [Google Scholar]
- Ahmed, S.; Liwicki, M.; Weber, M.; Dengel, A. Automatic room detection and room labeling from architectural floor plans. In Proceedings of the IAPR International Workshop on Document Analysis Systems, Gold Coast, Australia, 27–29 March 2012; pp. 339–343. [Google Scholar]
- De las Heras, L.P.; Ahmed, S.; Liwicki, M.; Valveny, E.; Sánchez, G. Statistical segmentation and structural recognition for floor plan interpretation. Int. J. Doc. Anal. Recognit. (Ijdar) 2014, 17, 221–237. [Google Scholar] [CrossRef]
- Lam, O.; Dayoub, F.; Schulz, R.; Corke, P. Automated topometric graph generation from floor plan analysis. In Proceedings of the Australasian Conference on Robotics and Automation 2015, Australian Robotics and Automation Association, Australia, Canberra, Australia, 2–4 December 2015; pp. 1–8. [Google Scholar]
- Liu, C.; Wu, J.; Kohli, P.; Furukawa, Y. Raster-to-vector: Revisiting floorplan transformation. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2195–2203. [Google Scholar]
- Ziran, Z.; Marinai, S. Object detection in floor plan images. In Proceedings of the IAPR Workshop on Artificial Neural Networks in Pattern Recognition, Siena, Italy, 19–21 September 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 383–394. [Google Scholar]
- Rezvanifar, A.; Cote, M.; Albu, A.B. Symbol spotting on digital architectural floor plans using a deep learning-based framework. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 568–569. [Google Scholar]
- Lu, Z.; Wang, T.; Guo, J.; Meng, W.; Xiao, J.; Zhang, W.; Zhang, X. Data-driven floor plan understanding in rural residential buildings via deep recognition. Inf. Sci. 2021, 567, 58–74. [Google Scholar] [CrossRef]
- Kim, S.; Park, S.; Kim, H.; Yu, K. Deep Floor Plan Analysis for Complicated Drawings Based on Style Transfer. J. Comput. Civ. Eng. 2021, 35, 04020066. [Google Scholar] [CrossRef]
- De Jong, G. Multi-Unit Floor Plan Recognition and Reconstruction. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2022. [Google Scholar]
- Lv, X.; Zhao, S.; Yu, X.; Zhao, B. Residential floor plan recognition and reconstruction. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 16712–16721. [Google Scholar]
- Huang, C.T.; Mitchell, O.R. A Euclidean distance transform using grayscale morphology decomposition. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 443–448. [Google Scholar] [CrossRef]
- Von Gioi, R.G.; Jakubowicz, J.; Morel, J.M.; Randall, G. LSD: A line segment detector. Image Process. Line 2012, 2, 35–55. [Google Scholar] [CrossRef]
- Smith, R. An overview of the Tesseract OCR engine. In Proceedings of the International Conference on Document Analysis and Recognition, Parana, Brazil, 23–26 September 2007; Volume 2, pp. 629–633. [Google Scholar]
- Jocher, G.; Chaurasia, A.; Qiu, J. YOLO by Ultralytics. 2023.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Precision | Recall | F-Measure | Mean IoU | |
|---|---|---|---|---|
| Zeng et al. [5] | 96.5% | 92% | 94.2% | 89% |
| Ours | 96.1% | 92.4% | 94.2% | 89.3% |
| Precision | Recall | F-Measure | |
|---|---|---|---|
| Zeng et al. [5] | 88% | 94.2% | 91% |
| Ours | 96.7% | 95.8% | 96.3% |
| Precision | Recall | F-Measure | Mean IoU | |
|---|---|---|---|---|
| Zeng et al. [5] | 85.3% | 99.2% | 91.7% | 84.6% |
| Ours | 92.4% | 98.3% | 95.3% | 91% |
| Room Name | Precision | Recall | F-Measure |
|---|---|---|---|
| LDK | 88.5% | 100% | 93.9% |
| Western-style room | 85.5% | 100% | 92.2% |
| Japanese-style room | 100% | 70% | 82.4% |
| Flexible space | 96.2% | 59.5% | 73.5% |
| Master bedroom | 100% | 97.6% | 98.8% |
| Child room | 100% | 98% | 99% |
| Toilet | 87.5% | 94.4% | 90.8% |
| Sanitary | 92.1% | 81.4% | 86.4% |
| Bathroom | 100% | 85.2% | 92% |
| Hall | 80.3% | 94.4% | 86.8% |
| Closet | 86.7% | 96.2% | 91.2% |
| Walk-in closet | 71.9% | 41.8% | 52.9% |
| Storage room | 94.4% | 79.1% | 85.7% |
| Others (25 names) | 60% | 74.3% | 66.3% |
| Average | 85.8% | 88.6% | 87.2% |
| Mean Edit Distance | |
|---|---|
| Zeng et al. [5] | 4.56 |
| Ours | 1.99 |
| Precision | Recall | F-Measure |
|---|---|---|
| 72.7% | 76.5% | 74.6% |
| Class | Precision | Recall | F-Measure |
|---|---|---|---|
| Outlet | 99.8% | 99.8% | 99.8% |
| Large capacity outlet 1 | 99% | 95.2% | 97.1% |
| Large capacity outlet 2 | 87.3% | 90.6% | 88.9% |
| Telephone line | 95% | 97.4% | 96.2% |
| TV line | 99.5% | 98.5% | 99% |
| Down light 1 | 100% | 99.4% | 99.7% |
| Down light 2 | 99.9% | 99.1% | 99.5% |
| Ceiling light 1 | 99.3% | 100% | 99.7% |
| Ceiling light 2 | 100% | 98.1% | 99% |
| Bracket light 1 | 97.5% | 95.7% | 96.6% |
| Bracket light 2 | 100% | 98% | 99% |
| Macro average | 97.9% | 97.4% | 97.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanaka, F.; Mizumoto, T.; Yamaguchi, H. Recognition of House Structures from Complicated Electrical Plan Images. Information 2024, 15, 147. https://doi.org/10.3390/info15030147
Tanaka F, Mizumoto T, Yamaguchi H. Recognition of House Structures from Complicated Electrical Plan Images. Information. 2024; 15(3):147. https://doi.org/10.3390/info15030147
Chicago/Turabian StyleTanaka, Fukuharu, Teruhiro Mizumoto, and Hirozumi Yamaguchi. 2024. "Recognition of House Structures from Complicated Electrical Plan Images" Information 15, no. 3: 147. https://doi.org/10.3390/info15030147
APA StyleTanaka, F., Mizumoto, T., & Yamaguchi, H. (2024). Recognition of House Structures from Complicated Electrical Plan Images. Information, 15(3), 147. https://doi.org/10.3390/info15030147