
Advancements in Deep Learning Techniques for Time Series Forecasting in Maritime Applications: A Comprehensive Review

Abstract
:1. Introduction
2. Literature Collection Procedure
- Search scope: Titles, Keywords, and Abstracts
- Keywords 1: ‘deep’ AND ‘learning’, AND
- Keywords 2: ‘time AND series’, AND
- Keywords 3: ‘maritime’, OR
- Keywords 4: ‘vessel’, OR
- Keywords 5: ‘shipping’, OR
- Keywords 6: ‘marine’, OR
- Keywords 7: ‘ship’, OR
- Keywords 8: ‘port’, OR
- Keywords 9: ‘terminal’
- Retain only articles related to maritime operations. For example, studies on ship-surrounding weather and risk prediction based on ship data will be kept, while research solely focused on marine weather or wave prediction that is unrelated to any aspect of maritime operations will be excluded.
- Exclude neural network studies that do not employ deep learning techniques, such as ANN or MLP with only one hidden layer.
- The language of the publications must be English.
- The original data used in the papers must include time series sequences.
3. Deep Learning Algorithms
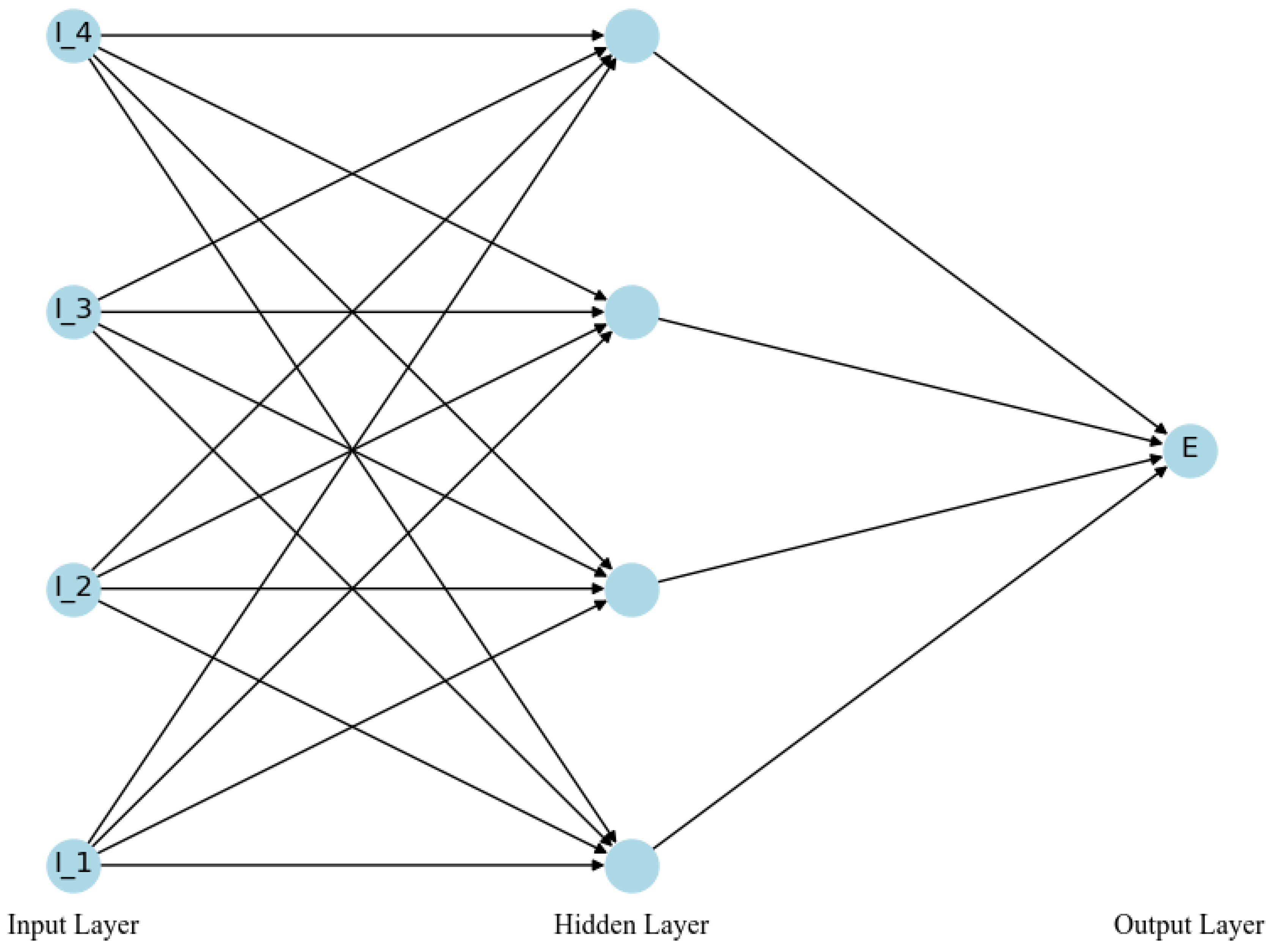
3.1. Artificial Neural Network (ANN)
3.1.1. Multilayer Perceptron (MLP)/Deep Neural Networks (DNN)
3.1.2. WaveNet
3.1.3. Randomized Neural Network
3.2. Convolutional Neural Network (CNN)
3.3. Recurrent Neural Network (RNN)
3.3.1. Long Short-Term Memory (LSTM)
3.3.2. Gated Recurrent Unit (GRU)
3.4. Attention Mechanism (AM)/Transformer
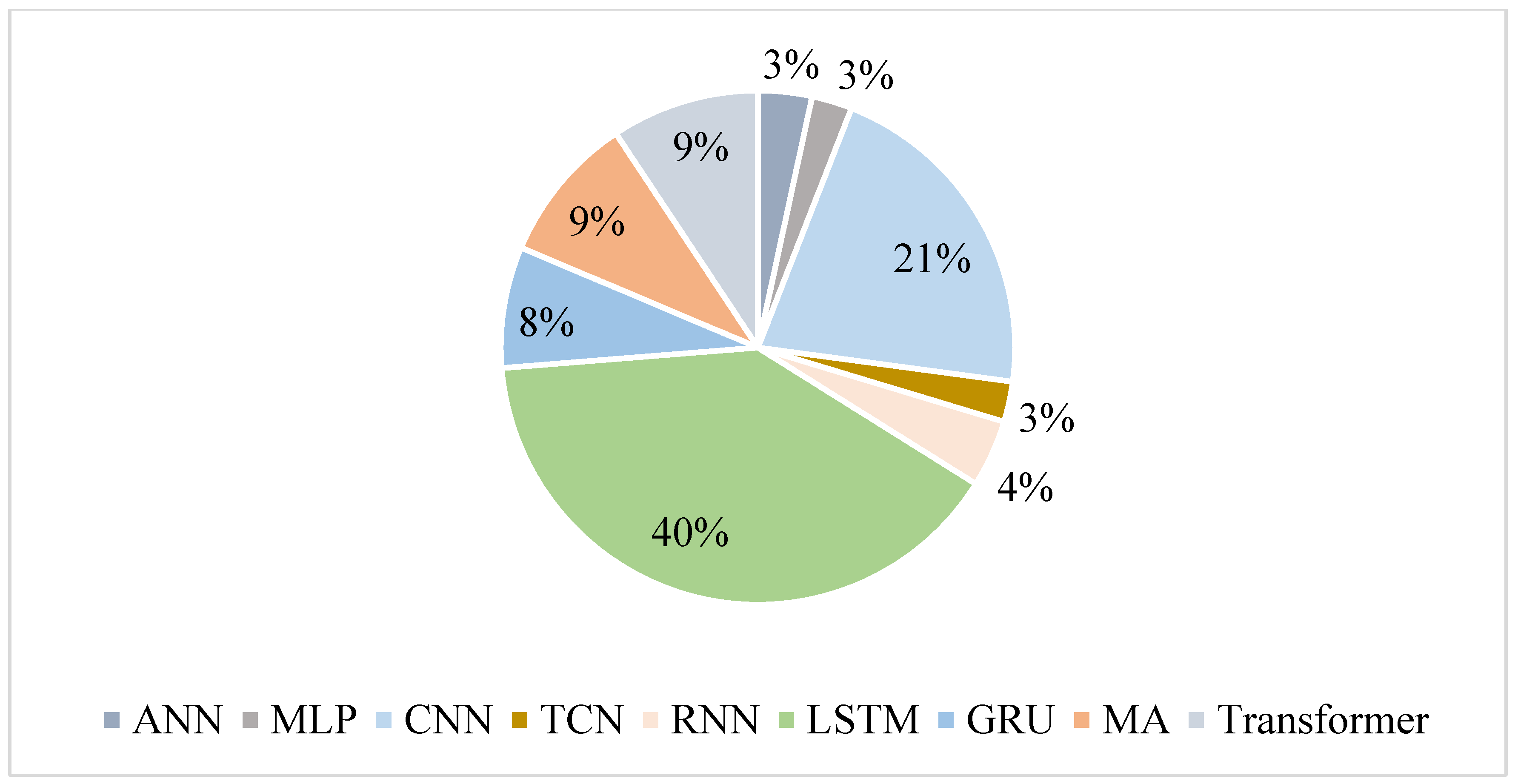
3.5. Overview of Algorithms Usage
4. Time Series Forecasting in Maritime Applications
4.1. Ship Operation-Related Applications
4.1.1. Ship Trajectory Prediction
- A.
- Navigation Safety Enhancement
- B.
- Ship Anomaly Detection
- C.
- Intelligent Navigation Practice
4.1.2. Meteorological Factor Prediction
4.1.3. Ship Fuel Consumption Prediction
4.1.4. Others
4.2. Port Operation-Related Applications
4.3. Shipping Market-Related Applications
4.4. Overview of Time Series Forecasting in Maritime Applications
5. Overall Analysis
5.1. Literature Description
5.1.1. Literature Distribution
5.1.2. Literature Classification
5.2. Data Utilized in Maritime Research
5.2.1. Automatic Identification System Data (AIS Data)
5.2.2. High-Frequency Radar Data and Sensor Data
5.2.3. Container Throughput Data
5.2.4. Other Datasets
5.3. Evaluation Parameters
5.4. Real-World Application Examples
5.5. Future Research Directions
5.5.1. Data Processing and Feature Extraction
5.5.2. Model Optimization and Application of New Technologies
5.5.3. Specific Application Scenarios
5.5.4. Practical Applications and Long-Term Predictions
5.5.5. Environmental Impact, Fault Prediction, and Cross-Domain Applications
6. Conclusions
- (1)
- This study fills the gap in the literature on advancements in deep learning techniques for time series forecasting in maritime applications, focusing on three key areas: ship operations, port operations, and shipping markets.
- (2)
- Different types of deep learning models are compared to identify the most suitable models for various applications. The differences between these models are discussed, providing valuable insights for domain researchers.
- (3)
- The study summarizes future research directions, helping to clarify future research objectives and guide subsequent studies. These directions include enhancing data processing and feature extraction, optimizing deep learning models, and exploring specific application scenarios. Additionally, practical applications and long-term predictions, environmental impacts, fault prediction, and cross-domain applications are addressed to provide comprehensive guidance for future research efforts.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- UNCTAD. Review of Maritime Transport 2023; United Nations Conference on Trade and Development: Geneva, Switzerland, 2023; Available online: https://www.un-ilibrary.org/content/books/9789213584569 (accessed on 1 April 2024).
- Liang, M.; Liu, R.W.; Zhan, Y.; Li, H.; Zhu, F.; Wang, F.Y. Fine-Grained Vessel Traffic Flow Prediction With a Spatio-Temporal Multigraph Convolutional Network. IEEE Trans. Intell. Transp. Syst. 2022, 23, 23694–23707. [Google Scholar] [CrossRef]
- Liu, R.W.; Liang, M.; Nie, J.; Lim, W.Y.B.; Zhang, Y.; Guizani, M. Deep Learning-Powered Vessel Trajectory Prediction for Improving Smart Traffic Services in Maritime Internet of Things. IEEE Trans. Netw. Sci. Eng. 2022, 9, 3080–3094. [Google Scholar] [CrossRef]
- Dui, H.; Zheng, X.; Wu, S. Resilience analysis of maritime transportation systems based on importance measures. Reliab. Eng. Syst. Saf. 2021, 209, 107461. [Google Scholar] [CrossRef]
- Liang, M.; Li, H.; Liu, R.W.; Lam, J.S.L.; Yang, Z. PiracyAnalyzer: Spatial temporal patterns analysis of global piracy incidents. Reliab. Eng. Syst. Saf. 2024, 243, 109877. [Google Scholar] [CrossRef]
- Chen, Z.S.; Lam, J.S.L.; Xiao, Z. Prediction of harbour vessel emissions based on machine learning approach. Transp. Res. Part D Transp. Environ. 2024, 131, 104214. [Google Scholar] [CrossRef]
- Chen, Z.S.; Lam, J.S.L.; Xiao, Z. Prediction of harbour vessel fuel consumption based on machine learning approach. Ocean Eng. 2023, 278, 114483. [Google Scholar] [CrossRef]
- Liang, M.; Weng, L.; Gao, R.; Li, Y.; Du, L. Unsupervised maritime anomaly detection for intelligent situational awareness using AIS data. Knowl.-Based Syst. 2024, 284, 111313. [Google Scholar] [CrossRef]
- Dave, V.S.; Dutta, K. Neural network based models for software effort estimation: A review. Artif. Intell. Rev. 2014, 42, 295–307. [Google Scholar] [CrossRef]
- Uslu, S.; Celik, M.B. Prediction of engine emissions and performance with artificial neural networks in a single cylinder diesel engine using diethyl ether. Eng. Sci. Technol. Int. J. 2018, 21, 1194–1201. [Google Scholar] [CrossRef]
- Chaudhary, L.; Sharma, S.; Sajwan, M. Systematic Literature Review of Various Neural Network Techniques for Sea Surface Temperature Prediction Using Remote Sensing Data. Arch. Comput. Methods Eng. 2023, 30, 5071–5103. [Google Scholar] [CrossRef]
- Dharia, A.; Adeli, H. Neural network model for rapid forecasting of freeway link travel time. Eng. Appl. Artif. Intell. 2003, 16, 607–613. [Google Scholar] [CrossRef]
- Hecht-Nielsen, R. Applications of counterpropagation networks. Neural Netw. 1988, 1, 131–139. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Veerappa, M.; Anneken, M.; Burkart, N. Evaluation of Interpretable Association Rule Mining Methods on Time-Series in the Maritime Domain. Springer International Publishing: Cham, Switzerland, 2021; pp. 204–218. [Google Scholar]
- Frizzell, J.; Furth, M. Prediction of Vessel RAOs: Applications of Deep Learning to Assist in Design. In Proceedings of the SNAME 27th Offshore Symposium, Houston, TX, USA, 22 February 2022. [Google Scholar] [CrossRef]
- Van Den Oord, A.; Dieleman, S.; Zen, H.; Simonyan, K.; Vinyals, O.; Graves, A.; Kalchbrenner, N.; Senior, A.; Kavukcuoglu, K. Wavenet: A generative model for raw audio. arXiv 2016, arXiv:1609.03499. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Ning, C.X.; Xie, Y.Z.; Sun, L.J. LSTM, WaveNet, and 2D CNN for nonlinear time history prediction of seismic responses. Eng. Struct. 2023, 286, 116083. [Google Scholar] [CrossRef]
- Schmidt, W.F.; Kraaijveld, M.A.; Duin, R.P. Feed forward neural networks with random weights. In International Conference on Pattern Recognition; IEEE Computer Society Press: Washington, DC, USA, 1992; pp. 1–4. [Google Scholar]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Pao, Y.H.; Park, G.H.; Sobajic, D.J. Learning and generalization characteristics of the random vector functional-link net. Neurocomputing 1994, 6, 163–180. [Google Scholar] [CrossRef]
- Zhang, L.; Suganthan, P.N. A comprehensive evaluation of random vector functional link networks. Inf. Sci. 2016, 367, 1094–1105. [Google Scholar] [CrossRef]
- Huang, G.; Huang, G.B.; Song, S.J.; You, K.Y. Trends in extreme learning machines: A review. Neural Netw. 2015, 61, 32–48. [Google Scholar] [CrossRef]
- Shi, Q.S.; Katuwal, R.; Suganthan, P.N.; Tanveer, M. Random vector functional link neural network based ensemble deep learning. Pattern Recognit. 2021, 117, 107978. [Google Scholar] [CrossRef]
- Du, L.; Gao, R.B.; Suganthan, P.N.; Wang, D.Z.W. Graph ensemble deep random vector functional link network for traffic forecasting. Appl. Soft Comput. 2022, 131, 109809. [Google Scholar] [CrossRef]
- Rehman, A.; Xing, H.L.; Hussain, M.; Gulzar, N.; Khan, M.A.; Hussain, A.; Mahmood, S. HCDP-DELM: Heterogeneous chronic disease prediction with temporal perspective enabled deep extreme learning machine. Knowl.-Based Syst. 2024, 284, 111316. [Google Scholar] [CrossRef]
- Gao, R.B.; Li, R.L.; Hu, M.H.; Suganthan, P.N.; Yuen, K.F. Online dynamic ensemble deep random vector functional link neural network for forecasting. Neural Netw. 2023, 166, 51–69. [Google Scholar] [CrossRef]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Palaz, D.; Magimai-Doss, M.; Collobert, R. End-to-end acoustic modeling using convolutional neural networks for HMM-based automatic speech recognition. Speech Commun. 2019, 108, 15–32. [Google Scholar] [CrossRef]
- Fang, W.; Love, P.E.D.; Luo, H.; Ding, L. Computer vision for behaviour-based safety in construction: A review and future directions. Adv. Eng. Inform. 2020, 43, 100980. [Google Scholar] [CrossRef]
- Qin, L.; Yu, N.; Zhao, D. Applying the convolutional neural network deep learning technology to behavioural recognition in intelligent video. Teh. Vjesn. 2018, 25, 528–535. [Google Scholar]
- Hoseinzade, E.; Haratizadeh, S. CNNpred: CNN-based stock market prediction using a diverse set of variables. Expert Syst. Appl. 2019, 129, 273–285. [Google Scholar] [CrossRef]
- Rasp, S.; Dueben, P.D.; Scher, S.; Weyn, J.A.; Mouatadid, S.; Thuerey, N. WeatherBench: A Benchmark Data Set for Data-Driven Weather Forecasting. J. Adv. Model. Earth Syst. 2020, 12, e2020MS002203. [Google Scholar] [CrossRef]
- Crivellari, A.; Beinat, E.; Caetano, S.; Seydoux, A.; Cardoso, T. Multi-target CNN-LSTM regressor for predicting urban distribution of short-term food delivery demand. J. Bus. Res. 2022, 144, 844–853. [Google Scholar] [CrossRef]
- Bai, S.; Kolter, J.Z.; Koltun, V. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling. arXiv 2018, arXiv:1803.01271. [Google Scholar]
- Lin, Z.; Yue, W.; Huang, J.; Wan, J. Ship Trajectory Prediction Based on the TTCN-Attention-GRU Model. Electronics 2023, 12, 2556. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity Mappings in Deep Residual Networks. In Computer Vision–ECCV 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 630–645. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Bin Syed, M.A.; Ahmed, I. A CNN-LSTM Architecture for Marine Vessel Track Association Using Automatic Identification System (AIS) Data. Sensors 2023, 23, 6400. [Google Scholar] [CrossRef] [PubMed]
- Li, M.-W.; Xu, D.-Y.; Geng, J.; Hong, W.-C. A hybrid approach for forecasting ship motion using CNN–GRU–AM and GCWOA. Appl. Soft Comput. 2022, 114, 108084. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, S.; Deng, L.; Jia, M.; Xu, J. Ship motion attitude prediction model based on IWOA-TCN-Attention. Ocean Eng. 2023, 272, 113911. [Google Scholar] [CrossRef]
- Elman, J.L. Finding Structure in Time. Cogn. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]
- Shan, F.; He, X.; Armaghani, D.J.; Sheng, D. Effects of data smoothing and recurrent neural network (RNN) algorithms for real-time forecasting of tunnel boring machine (TBM) performance. J. Rock Mech. Geotech. Eng. 2024, 16, 1538–1551. [Google Scholar] [CrossRef]
- Apaydin, H.; Feizi, H.; Sattari, M.T.; Colak, M.S.; Shamshirband, S.; Chau, K.-W. Comparative Analysis of Recurrent Neural Network Architectures for Reservoir Inflow Forecasting. Water 2020, 12, 1500. [Google Scholar] [CrossRef]
- Ma, Z.; Zhang, H.; Liu, J. MM-RNN: A Multimodal RNN for Precipitation Nowcasting. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–14. [Google Scholar] [CrossRef]
- Lu, M.; Xu, X. TRNN: An efficient time-series recurrent neural network for stock price prediction. Inf. Sci. 2024, 657, 119951. [Google Scholar] [CrossRef]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning long-term dependencies with gradient descent is difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef]
- Kratzert, F.; Klotz, D.; Brenner, C.; Schulz, K.; Herrnegger, M. Rainfall–runoff modelling using Long Short-Term Memory (LSTM) networks. Hydrol. Earth Syst. Sci. 2018, 22, 6005–6022. [Google Scholar] [CrossRef]
- Hochreiter, S. Untersuchungen zu dynamischen neuronalen Netzen. Diploma Tech. Univ. München 1991, 91, 31. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Gers, F.A.; Schmidhuber, J.; Cummins, F. Learning to Forget: Continual Prediction with LSTM. Neural Comput. 2000, 12, 2451–2471. [Google Scholar] [CrossRef] [PubMed]
- Witten, I.H.; Frank, E. Data mining: Practical machine learning tools and techniques with Java implementations. SIGMOD Rec. 2002, 31, 76–77. [Google Scholar] [CrossRef]
- Mo, J.X.; Gao, R.B.; Liu, J.H.; Du, L.; Yuen, K.F. Annual dilated convolutional LSTM network for time charter rate forecasting. Appl. Soft Comput. 2022, 126, 109259. [Google Scholar] [CrossRef]
- Cho, K.; Van Merriënboer, B.; Bahdanau, D.; Bengio, Y. On the properties of neural machine translation: Encoder-decoder approaches. arXiv 2014, arXiv:1409.1259. [Google Scholar]
- Yang, S.; Yu, X.; Zhou, Y. LSTM and GRU Neural Network Performance Comparison Study: Taking Yelp Review Dataset as an Example. In Proceedings of the 2020 International Workshop on Electronic Communication and Artificial Intelligence (IWECAI), Shanghai, China, 12–14 June 2020; pp. 98–101. [Google Scholar] [CrossRef]
- Zhao, Z.N.; Yun, S.N.; Jia, L.Y.; Guo, J.X.; Meng, Y.; He, N.; Li, X.J.; Shi, J.R.; Yang, L. Hybrid VMD-CNN-GRU-based model for short-term forecasting of wind power considering spatio-temporal features. Eng. Appl. Artif. Intell. 2023, 121, 105982. [Google Scholar] [CrossRef]
- Pan, N.; Ding, Y.; Fu, J.; Wang, J.; Zheng, H. Research on Ship Arrival Law Based on Route Matching and Deep Learning. J. Phys. Conf. Ser. 2021, 1952, 022023. [Google Scholar] [CrossRef]
- Ma, J.; Li, W.K.; Jia, C.F.; Zhang, C.W.; Zhang, Y. Risk Prediction for Ship Encounter Situation Awareness Using Long Short-Term Memory Based Deep Learning on Intership Behaviors. J. Adv. Transp. 2020, 2020, 8897700. [Google Scholar] [CrossRef]
- Suo, Y.F.; Chen, W.K.; Claramunt, C.; Yang, S.H. A Ship Trajectory Prediction Framework Based on a Recurrent Neural Network. Sensors 2020, 20, 5133. [Google Scholar] [CrossRef] [PubMed]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural machine translation by jointly learning to align and translate. arXiv 2014, arXiv:1409.0473. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 03762. [Google Scholar]
- Nascimento, E.G.S.; de Melo, T.A.C.; Moreira, D.M. A transformer-based deep neural network with wavelet transform for forecasting wind speed and wind energy. Energy 2023, 278, 127678. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, J.; Niu, J.; Wu, Q.M.J.; Li, G. Track Prediction for HF Radar Vessels Submerged in Strong Clutter Based on MSCNN Fusion with GRU-AM and AR Model. Remote Sens. 2021, 13, 2164. [Google Scholar] [CrossRef]
- Zhang, X.; Fu, X.; Xiao, Z.; Xu, H.; Zhang, W.; Koh, J.; Qin, Z. A Dynamic Context-Aware Approach for Vessel Trajectory Prediction Based on Multi-Stage Deep Learning. IEEE Trans. Intell. Veh. 2024, 1–16. [Google Scholar] [CrossRef]
- Jiang, D.; Shi, G.; Li, N.; Ma, L.; Li, W.; Shi, J. TRFM-LS: Transformer-Based Deep Learning Method for Vessel Trajectory Prediction. J. Mar. Sci. Eng. 2023, 11, 880. [Google Scholar] [CrossRef]
- Violos, J.; Tsanakas, S.; Androutsopoulou, M.; Palaiokrassas, G.; Varvarigou, T. Next Position Prediction Using LSTM Neural Networks. In Proceedings of the 11th Hellenic Conference on Artificial Intelligence, Athens, Greece, 2–4 September 2020; pp. 232–240. [Google Scholar] [CrossRef]
- Hoque, X.; Sharma, S.K. Ensembled Deep Learning Approach for Maritime Anomaly Detection System. In Proceedings of the 1st International Conference on Emerging Trends in Information Technology (ICETIT), Inst Informat Technol & Management, New Delhi, India, 21–22 June 2020; In Lecture Notes in Electrical Engineering. Volume 605, pp. 862–869. [Google Scholar]
- Wang, Y.; Zhang, M.; Fu, H.; Wang, Q. Research on Prediction Method of Ship Rolling Motion Based on Deep Learning. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 7182–7187. [Google Scholar] [CrossRef]
- Choi, J. Predicting the Frequency of Marine Accidents by Navigators’ Watch Duty Time in South Korea Using LSTM. Appl. Sci. 2022, 12, 11724. [Google Scholar] [CrossRef]
- Li, T.; Li, Y.B. Prediction of ship trajectory based on deep learning. J. Phys. Conf. Ser. 2023, 2613, 012023. [Google Scholar] [CrossRef]
- Chondrodima, E.; Pelekis, N.; Pikrakis, A.; Theodoridis, Y. An Efficient LSTM Neural Network-Based Framework for Vessel Location Forecasting. IEEE Trans. Intell. Transp. Syst. 2023, 24, 4872–4888. [Google Scholar] [CrossRef]
- Long, Z.; Suyuan, W.; Zhongma, C.; Jiaqi, F.; Xiaoting, Y.; Wei, D. Lira-YOLO: A lightweight model for ship detection in radar images. J. Syst. Eng. Electron. 2020, 31, 950–956. [Google Scholar] [CrossRef]
- Cheng, X.; Li, G.; Skulstad, R.; Zhang, H.; Chen, S. SpectralSeaNet: Spectrogram and Convolutional Network-based Sea State Estimation. In Proceedings of the IECON 2020 the 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 5069–5074. [Google Scholar] [CrossRef]
- Wang, K.; Cheng, X.; Shi, F. Learning Dynamic Graph Structures for Sea State Estimation with Deep Neural Networks. In Proceedings of the 2023 6th International Conference on Intelligent Autonomous Systems (ICoIAS), Qinhuangdao, China, 22–24 September 2023; pp. 161–166. [Google Scholar]
- Yu, J.; Huang, D.; Shi, X.; Li, W.; Wang, X. Real-Time Moving Ship Detection from Low-Resolution Large-Scale Remote Sensing Image Sequence. Appl. Sci. 2023, 13, 2584. [Google Scholar] [CrossRef]
- Ilias, L.; Kapsalis, P.; Mouzakitis, S.; Askounis, D. A Multitask Learning Framework for Predicting Ship Fuel Oil Consumption. IEEE Access 2023, 11, 132576–132589. [Google Scholar] [CrossRef]
- Selimovic, D.; Hrzic, F.; Prpic-Orsic, J.; Lerga, J. Estimation of sea state parameters from ship motion responses using attention-based neural networks. Ocean Eng. 2023, 281, 114915. [Google Scholar] [CrossRef]
- Ma, J.; Jia, C.; Yang, X.; Cheng, X.; Li, W.; Zhang, C. A Data-Driven Approach for Collision Risk Early Warning in Vessel Encounter Situations Using Attention-BiLSTM. IEEE Access 2020, 8, 188771–188783. [Google Scholar] [CrossRef]
- Ji, Z.; Gan, H.; Liu, B. A Deep Learning-Based Fault Warning Model for Exhaust Temperature Prediction and Fault Warning of Marine Diesel Engine. J. Mar. Sci. Eng. 2023, 11, 1509. [Google Scholar] [CrossRef]
- Liu, Y.; Gan, H.; Cong, Y.; Hu, G. Research on fault prediction of marine diesel engine based on attention-LSTM. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2023, 237, 508–519. [Google Scholar] [CrossRef]
- Li, M.W.; Xu, D.Y.; Geng, J.; Hong, W.C. A ship motion forecasting approach based on empirical mode decomposition method hybrid deep learning network and quantum butterfly optimization algorithm. Nonlinear Dyn. 2022, 107, 2447–2467. [Google Scholar] [CrossRef]
- Yang, C.H.; Chang, P.Y. Forecasting the Demand for Container Throughput Using a Mixed-Precision Neural Architecture Based on CNN–LSTM. Mathematics 2020, 8, 1784. [Google Scholar] [CrossRef]
- Zhang, W.; Wu, P.; Peng, Y.; Liu, D. Roll Motion Prediction of Unmanned Surface Vehicle Based on Coupled CNN and LSTM. Future Internet 2019, 11, 243. [Google Scholar] [CrossRef]
- Kamal, I.M.; Bae, H.; Sunghyun, S.; Yun, H. DERN: Deep Ensemble Learning Model for Short- and Long-Term Prediction of Baltic Dry Index. Appl. Sci. 2020, 10, 1504. [Google Scholar] [CrossRef]
- Li, M.Z.; Li, B.; Qi, Z.G.; Li, J.S.; Wu, J.W. Enhancing Maritime Navigational Safety: Ship Trajectory Prediction Using ACoAtt–LSTM and AIS Data. ISPRS Int. J. Geo-Inform. 2024, 13, 85. [Google Scholar] [CrossRef]
- Yu, T.; Zhang, Y.; Zhao, S.; Yang, J.; Li, W.; Guo, W. Vessel trajectory prediction based on modified LSTM with attention mechanism. In Proceedings of the 2024 4th International Conference on Neural Networks, Information and Communication Engineering, NNICE, Guangzhou, China, 19–21 January 2024; pp. 912–918. [Google Scholar] [CrossRef]
- Xia, C.; Peng, Y.; Qu, D. A pre-trained model specialized for ship trajectory prediction. In Proceedings of the IEEE Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 15–17 March 2024; pp. 1857–1860. [Google Scholar] [CrossRef]
- Cheng, X.; Li, G.; Skulstad, R.; Chen, S.; Hildre, H.P.; Zhang, H. Modeling and Analysis of Motion Data from Dynamically Positioned Vessels for Sea State Estimation. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6644–6650. [Google Scholar] [CrossRef]
- Xia, C.; Qu, D.; Zheng, Y. TATBformer: A Divide-and-Conquer Approach to Ship Trajectory Prediction Modeling. In Proceedings of the 2023 IEEE 11th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 8–10 December 2023; pp. 335–339. [Google Scholar] [CrossRef]
- Ran, Y.; Shi, G.; Li, W. Ship Track Prediction Model based on Automatic Identification System Data and Bidirectional Cyclic Neural Network. In Proceedings of the 2021 4th International Symposium on Traffic Transportation and Civil Architecture, ISTTCA, Suzhou, China, 12–14 November 2021; pp. 297–301. [Google Scholar] [CrossRef]
- Yang, C.H.; Wu, C.H.; Shao, J.C.; Wang, Y.C.; Hsieh, C.M. AIS-Based Intelligent Vessel Trajectory Prediction Using Bi-LSTM. IEEE Access 2022, 10, 24302–24315. [Google Scholar] [CrossRef]
- Sadeghi, Z.; Matwin, S. Anomaly detection for maritime navigation based on probability density function of error of reconstruction. J. Intell. Syst. 2023, 32, 20220270. [Google Scholar] [CrossRef]
- Perumal, V.; Murugaiyan, S.; Ravichandran, P.; Venkatesan, R.; Sundar, R. Real time identification of anomalous events in coastal regions using deep learning techniques. Concurr. Comput. Pract. Exp. 2021, 33, e6421. [Google Scholar] [CrossRef]
- Xie, J.L.; Shi, W.F.; Shi, Y.Q. Research on Fault Diagnosis of Six-Phase Propulsion Motor Drive Inverter for Marine Electric Propulsion System Based on Res-BiLSTM. Machines 2022, 10, 736. [Google Scholar] [CrossRef]
- Han, P.; Li, G.; Skulstad, R.; Skjong, S.; Zhang, H. A Deep Learning Approach to Detect and Isolate Thruster Failures for Dynamically Positioned Vessels Using Motion Data. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Cheng, X.; Wang, K.; Liu, X.; Yu, Q.; Shi, F.; Ren, Z.; Chen, S. A Novel Class-Imbalanced Ship Motion Data-Based Cross-Scale Model for Sea State Estimation. IEEE Trans. Intell. Transp. Syst. 2023, 24, 15907–15919. [Google Scholar] [CrossRef]
- Lei, L.; Wen, Z.; Peng, Z. Prediction of Main Engine Speed and Fuel Consumption of Inland Ships Based on Deep Learning. J. Phys. Conf. Ser. 2021, 2025, 012012. [Google Scholar]
- Ljunggren, H. Using Deep Learning for Classifying Ship Trajectories. In Proceedings of the 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 2158–2164. [Google Scholar]
- Kulshrestha, A.; Yadav, A.; Sharma, H.; Suman, S. A deep learning-based multivariate decomposition and ensemble framework for container throughput forecasting. J. Forecast. 2024, in press. [Google Scholar] [CrossRef]
- Shankar, S.; Ilavarasan, P.V.; Punia, S.; Singh, S.P. Forecasting container throughput with long short-term memory networks. Ind. Manag. Data Syst. 2020, 120, 425–441. [Google Scholar] [CrossRef]
- Lee, E.; Kim, D.; Bae, H. Container Volume Prediction Using Time-Series Decomposition with a Long Short-Term Memory Models. Appl. Sci. 2021, 11, 8995. [Google Scholar] [CrossRef]
- Cuong, T.N.; You, S.-S.; Long, L.N.B.; Kim, H.-S. Seaport Resilience Analysis and Throughput Forecast Using a Deep Learning Approach: A Case Study of Busan Port. Sustainability 2022, 14, 13985. [Google Scholar] [CrossRef]
- Song, X.; Chen, Z.S. Shipping market time series forecasting via an Ensemble Deep Dual-Projection Echo State Network. Comput. Electr. Eng. 2024, 117, 109218. [Google Scholar] [CrossRef]
- Li, X.; Hu, Y.; Bai, Y.; Gao, X.; Chen, G. DeepDLP: Deep Reinforcement Learning based Framework for Dynamic Liner Trade Pricing. In Proceedings of the Proceedings of the 2023 17th International Conference on Ubiquitous Information Management and Communication, IMCOM, Seoul, Republic of Korea, 3–5 January 2023; pp. 1–8. [Google Scholar] [CrossRef]
- Alqatawna, A.; Abu-Salih, B.; Obeid, N.; Almiani, M. Incorporating Time-Series Forecasting Techniques to Predict Logistics Companies’ Staffing Needs and Order Volume. Computation 2023, 11, 141. [Google Scholar] [CrossRef]
- Lim, S.; Kim, S.J.; Park, Y.; Kwon, N. A deep learning-based time series model with missing value handling techniques to predict various types of liquid cargo traffic. Expert Syst. Appl. 2021, 184, 115532. [Google Scholar] [CrossRef]
- Cheng, R.; Gao, R.; Yuen, K.F. Ship order book forecasting by an ensemble deep parsimonious random vector functional link network. Eng. Appl. Artif. Intell. 2024, 133, 108139. [Google Scholar] [CrossRef]
- Xiao, Z.; Fu, X.J.; Zhang, L.Y.; Goh, R.S.M. Traffic Pattern Mining and Forecasting Technologies in Maritime Traffic Service Networks: A Comprehensive Survey. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1796–1825. [Google Scholar] [CrossRef]
- Yan, R.; Wang, S.A.; Psaraftis, H.N. Data analytics for fuel consumption management in maritime transportation: Status and perspectives. Transp. Res. Part E Logist. Transp. Rev. 2021, 155, 102489. [Google Scholar] [CrossRef]
- Filom, S.; Amiri, A.M.; Razavi, S. Applications of machine learning methods in port operations—A systematic literature review. Transp. Res. Part E-Logist. Transp. Rev. 2022, 161, 102722. [Google Scholar] [CrossRef]
- Ksciuk, J.; Kuhlemann, S.; Tierney, K.; Koberstein, A. Uncertainty in maritime ship routing and scheduling: A Literature review. Eur. J. Oper. Res. 2023, 308, 499–524. [Google Scholar] [CrossRef]
- Jia, H.; Prakash, V.; Smith, T. Estimating vessel payloads in bulk shipping using AIS data. Int. J. Shipp. Transp. Logist. 2019, 11, 25–40. [Google Scholar] [CrossRef]
- Yang, D.; Wu, L.X.; Wang, S.A.; Jia, H.Y.; Li, K.X. How big data enriches maritime research—A critical review of Automatic Identification System (AIS) data applications. Transp. Rev. 2019, 39, 755–773. [Google Scholar] [CrossRef]
- Liu, M.; Zhao, Y.; Wang, J.; Liu, C.; Li, G. A Deep Learning Framework for Baltic Dry Index Forecasting. Procedia Comput. Sci. 2022, 199, 821–828. [Google Scholar] [CrossRef]
- Wang, Y.C.; Wang, H.; Zou, D.X.; Fu, H.X. Ship roll prediction algorithm based on Bi-LSTM-TPA combined model. J. Mar. Sci. Eng. 2021, 9, 387. [Google Scholar] [CrossRef]
- Xie, H.T.; Jiang, X.Q.; Hu, X.; Wu, Z.T.; Wang, G.Q.; Xie, K. High-efficiency and low-energy ship recognition strategy based on spiking neural network in SAR images. Front. Neurorobotics 2022, 16, 970832. [Google Scholar] [CrossRef]
- Muñoz, D.U.; Ruiz-Aguilar, J.J.; González-Enrique, J.; Domínguez, I.J.T. A Deep Ensemble Neural Network Approach to Improve Predictions of Container Inspection Volume. In Proceedings of the 15th International Work-Conference on Artificial Neural Networks (IWANN), Gran Canaria, Spain, 12–14 June 2019; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11506, pp. 806–817. [Google Scholar] [CrossRef]
- Velasco-Gallego, C.; Lazakis, I. Mar-RUL: A remaining useful life prediction approach for fault prognostics of marine machinery. Appl. Ocean Res. 2023, 140, 103735. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, K.; Wang, C.; Chen, J.; Qi, H. A novel deep reinforcement learning for POMDP-based autonomous ship collision decision-making. Neural Comput. Appl. 2023, 1–15. [Google Scholar] [CrossRef]
- Guo, X.X.; Zhang, X.T.; Lu, W.Y.; Tian, X.L.; Li, X. Real-time prediction of 6-DOF motions of a turret-moored FPSO in harsh sea state. Ocean Eng. 2022, 265, 112500. [Google Scholar] [CrossRef]
- Kim, D.; Kim, T.; An, M.; Cho, Y.; Baek, Y.; IEEE. Edge AI-based early anomaly detection of LNG Carrier Main Engine systems. In Proceedings of the OCEANS Conference, Limerick, Ireland, 5–8 June 2023. [Google Scholar] [CrossRef]
- Theodoropoulos, P.; Spandonidis, C.C.; Giannopoulos, F.; Fassois, S. A Deep Learning-Based Fault Detection Model for Optimization of Shipping Operations and Enhancement of Maritime Safety. Sensors 2021, 21, 5658. [Google Scholar] [CrossRef] [PubMed]
- Huang, B.; Wu, B.; Barry, M. Geographically and temporally weighted regression for modeling spatio-temporal variation in house prices. Int. J. Geogr. Inf. Sci. 2010, 24, 383–401. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, Y.; Streets, D.G.; Wang, C. How does decarbonization of the central heating industry affect employment? A spatiotemporal analysis from the perspective of urbanization. Energy Build. 2024, 306, 113912. [Google Scholar] [CrossRef]
- Zhang, D.; Li, X.; Wan, C.; Man, J. A novel hybrid deep-learning framework for medium-term container throughput forecasting: An application to China’s Guangzhou, Qingdao and Shanghai hub ports. Marit. Econ. Logist. 2024, 26, 44–73. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Zhou, B.; Fu, H. Multi-dimensional prediction method based on Bi-LSTMC for ship roll. Ocean Eng. 2021, 242, 110106. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Architecture | Dataset | Advantage |
|---|---|---|---|
| [64] | MSCNN-GRU-AM | HF radar | It is applicable for high-frequency radar ship track prediction in environments with significant clutter and interference |
| [80] | CNN-BiLSTM-Attention | 6L34DF dual fuel diesel engine | The high prediction accuracy and early warning timeliness can provide interpretable fault prediction results |
| [122] | LSTM | Two LNG carriers | Enables early anomaly detection in new ships and new equipment |
| [98] | LSTM | sensors | better and high-precision effects |
| [42] | Self-Attention-BiLSTM | A real military ship | Not only can it better capture complex ship attitude changes, but it also shows greater accuracy and stability in long-term forecasting tasks |
| [41] | CNN–GRU–AM | A C11 containership | better accuracy of forecasting |
| [121] | GRU | A scaled model test | good prediction accuracy |
| [123] | CNN | A bulk carrier | good prediction accuracy |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Guo, X.; She, Y.; Zhou, Y.; Liang, M.; Chen, Z.S. Advancements in Deep Learning Techniques for Time Series Forecasting in Maritime Applications: A Comprehensive Review. Information 2024, 15, 507. https://doi.org/10.3390/info15080507
Wang M, Guo X, She Y, Zhou Y, Liang M, Chen ZS. Advancements in Deep Learning Techniques for Time Series Forecasting in Maritime Applications: A Comprehensive Review. Information. 2024; 15(8):507. https://doi.org/10.3390/info15080507
Chicago/Turabian StyleWang, Meng, Xinyan Guo, Yanling She, Yang Zhou, Maohan Liang, and Zhong Shuo Chen. 2024. "Advancements in Deep Learning Techniques for Time Series Forecasting in Maritime Applications: A Comprehensive Review" Information 15, no. 8: 507. https://doi.org/10.3390/info15080507