Robotic Choreography Inspired by the Method of Human Dance Creation



Abstract
:1. Introduction
2. Related Work
3. The Mechanism of Autonomous Robotic Choreography Creation
3.1. Human Dance Creation
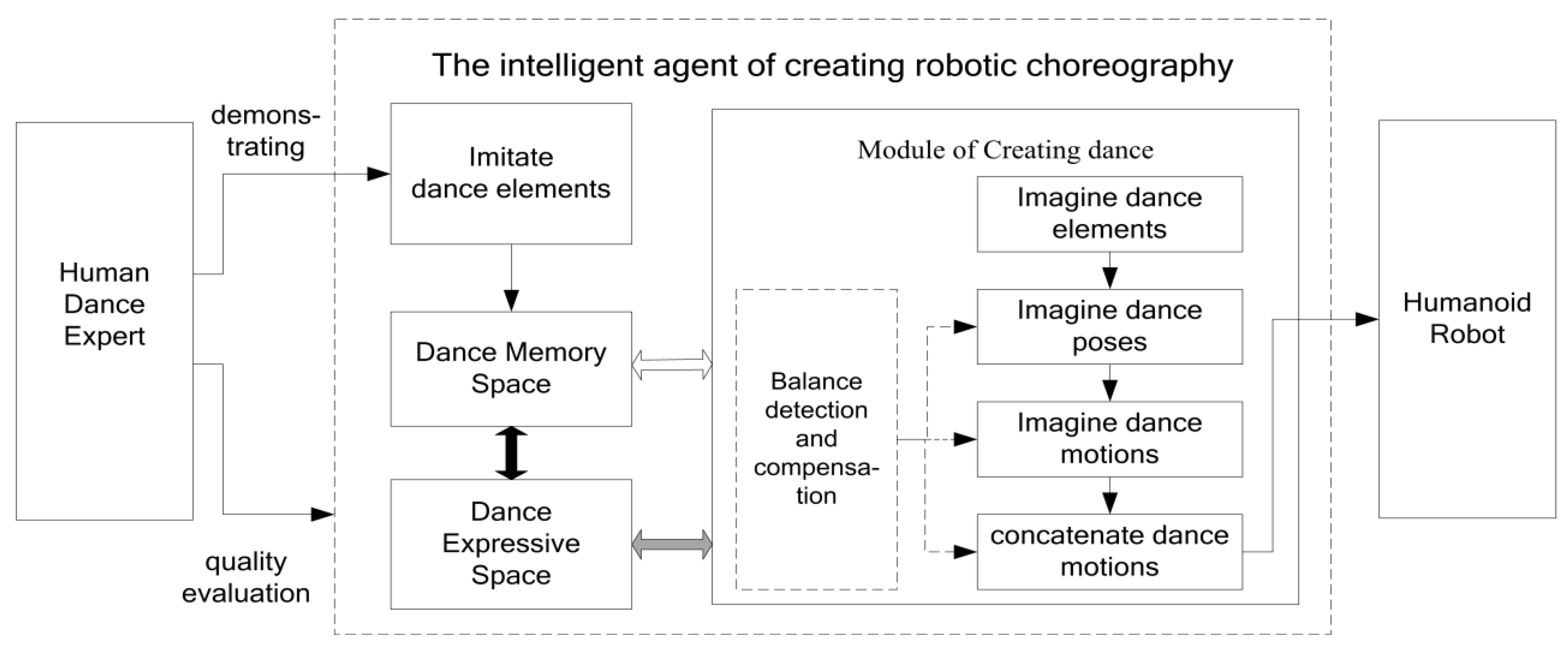
3.2. Framework
3.3. Dance Space: Expressive and Memory
3.3.1. Dance Expressive Space
3.3.2. Dance Memory Space
3.4. Imagination: Elements, Poses, Motions
3.4.1. Imaging Dance Elements
| Algorithm 1 The algorithm of imagining new dance element on single joint |
| 1. For (select each limb Li from L in turn) //Li = {Ji,1, Ji,2, …, Ji,|Li|} 2. If Ci = 0 Then 3. For (select each imitated dance element DEi on Li in turn) //DEi = (Vi,1, Vi,2, …, Vi,|Li|) 4. {If not repeat (DEi) Then the imitated dance element DEi is joined into W 5. For (select each joint Ji,k from Li in turn) //k∈[1,|Li|] 6. {For (select each value V’ from the domain Dk [lowerbound, upperbound] that corresponds to the joint Ji,k, and the step length is 2di) 7. { Imagine a new dance element DEi’(Vi,1, Vi,2, …, Vi,k−1,V’, Vi,k+1,…, Vi,|Li|) on Li 8. If not repeat (DEi’) Then the imagined dance element DEi’ is joined into W 9. } 10. } 11. If full Then finish the imagination on the limb Li, and return to the outer loop to select the next limb 12. } |
| Algorithm 2 The algorithm of imagining new and symmetrical /antisymmetric dance element on double joints |
| 1. For (select each limb Li from L in turn) //Li = {Ji,1, Ji,2, …, Ji,|Li|} 2. If Li is mirror symmetrical limb Then 3. {For (select each imitated dance element DEi on Li in turn) //DEi = (Vi,1, Vi,2, …, Vi,|Li|) 4. If DEi is symmetrical dance element Then //DEi = (Vi,1,Vi,1’,…,Vi,k−1, Vi,k−1’, Vi,k, Vi,k’,…,Vi,|Li|/2, Vi,|Li|/2’) 5. {If not repeat(DEi) Then the imitated dance element DEi is joined into W; 6. For (select each joint pair <Ji,k, Ji,k’> on Li in turn) //k∈[1,|Li|/2] 7. {For (select each value V’ from the domain Dk[lowerbound, upperbound] that corresponds to the joint Ji,k, and the step length is 2di) 8. { If joint pair <Ji,k, Ji,k’> is symmetrical Then V’/−V’ is assigned as the value of Ji,k’; 9. If joint pair <Ji,k, Ji,k’> is antisymmetrical Then −V’/V’ is assigned as the value of Ji,k’; 10. Imagine a new dance element DEi’(Vi,1,Vi,1’,…,Vi,k−1,Vi,k−1’, V’, V’ or –V’,…,Vi,|Li|/2, Vi,|Li|/2’) on Li; 11. If not repeat(DEi’) Then the imagined dance element DEi’ is joined into W; 12. } 13. } 14. If full Then finish the imagination on the limb Li, and return to the outer loop to select the next limb; 15. } 16. } |
3.4.2. Imaging Dance Poses and Dance Motions
3.4.3. Concatenating Dance Motions
4. Experimental Results
5. Evaluation and Analysis
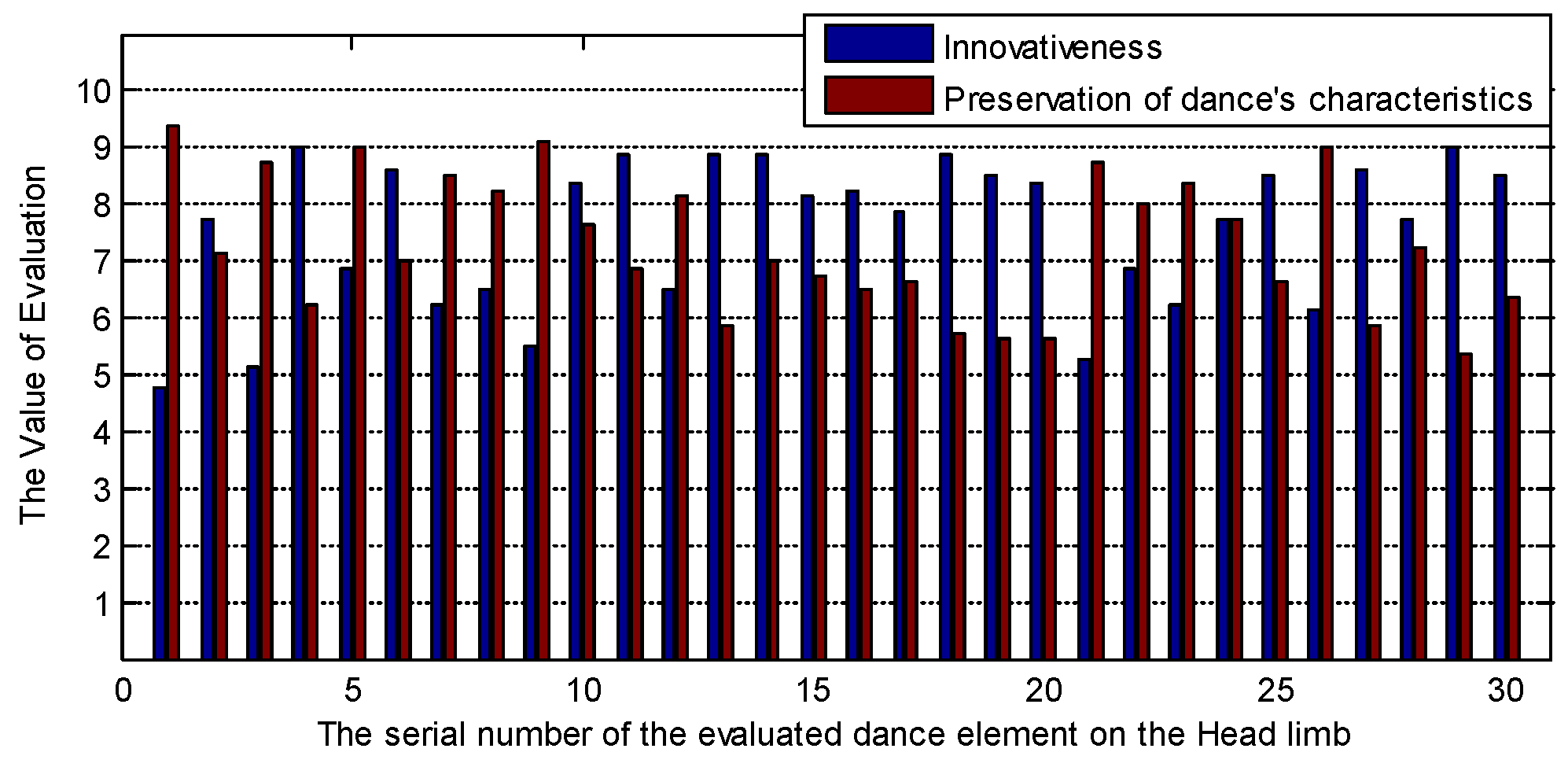
- The average score of the 30 imagined dance elements for the Head limb is 7.30 points on keeping the characteristics of dance, and 7.55 points for innovativeness.
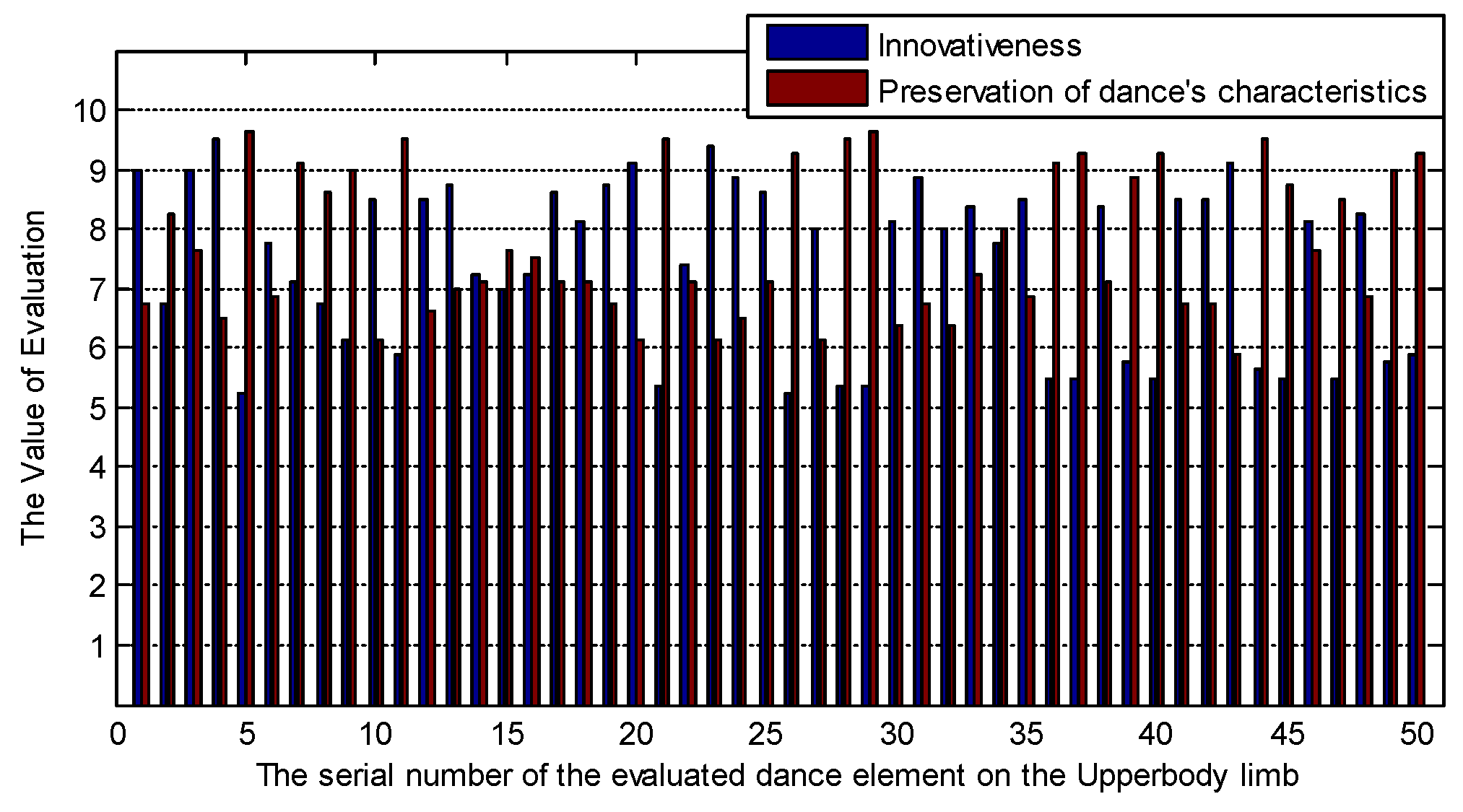
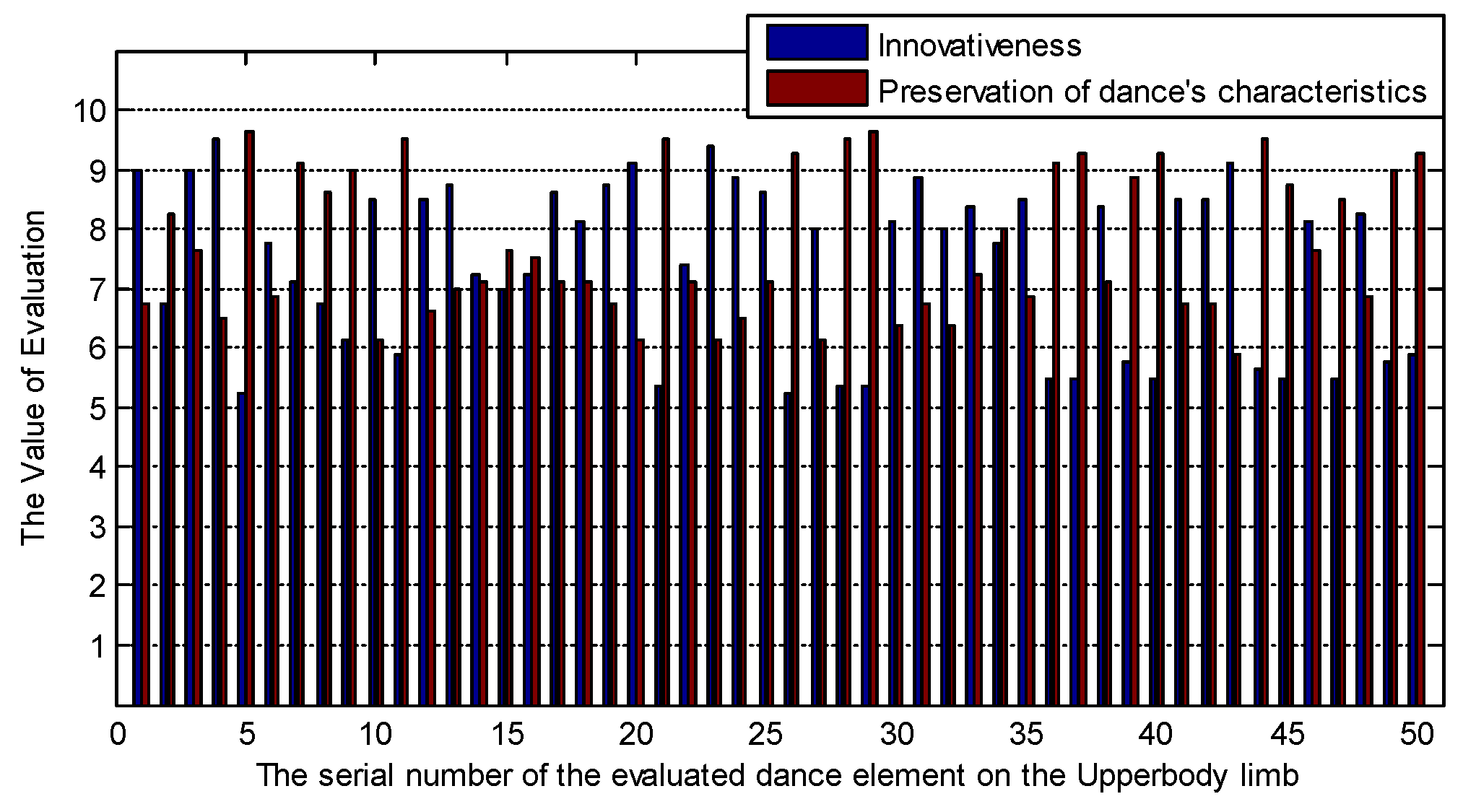
- The average score of the 50 imagined dance elements for the Upperbody limb is 7.72 points on keeping the dance characteristics, and 7.39 points for innovativeness.
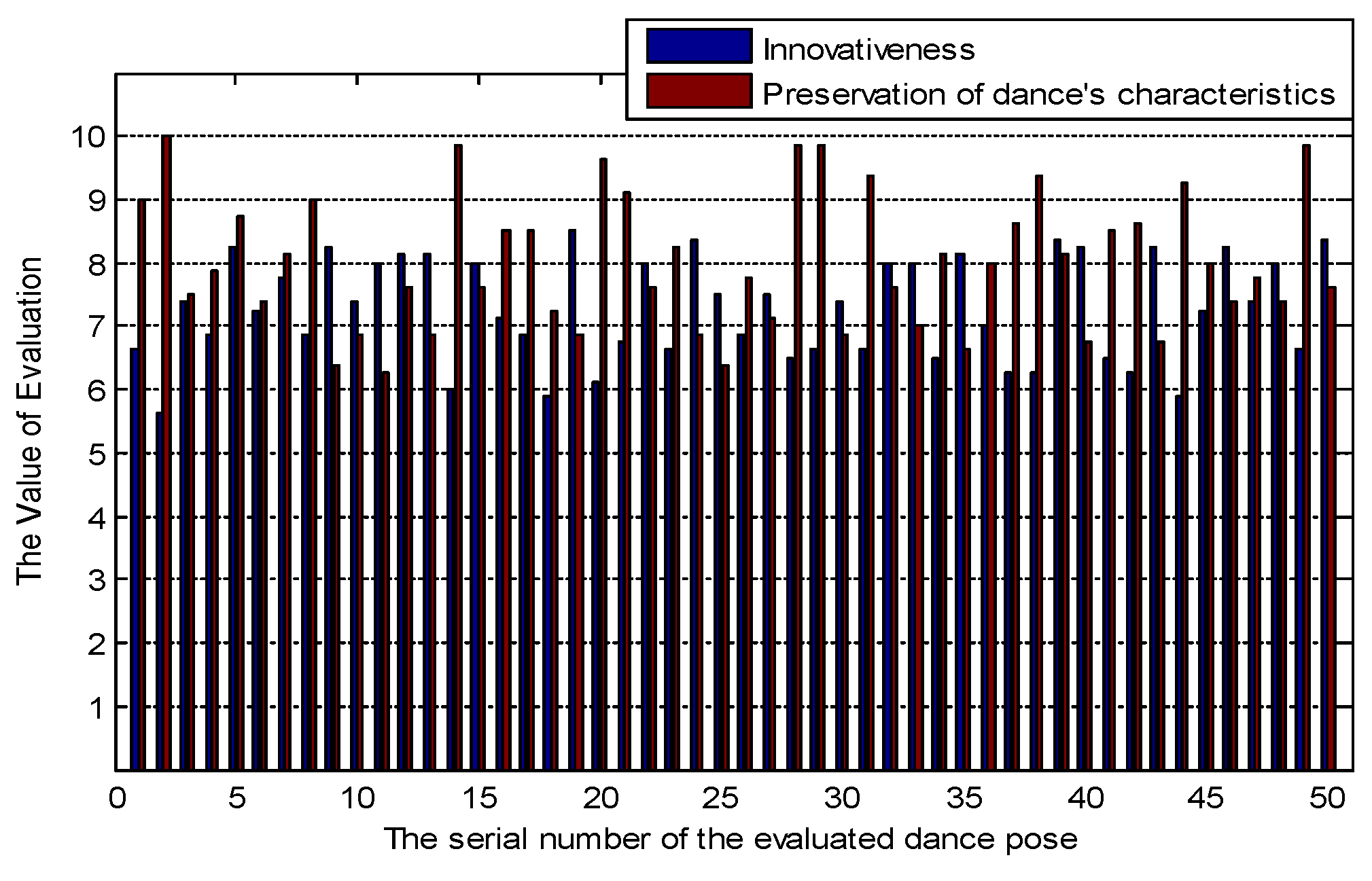
- The average score of the 50 imagined dance poses is 8.01 points for keeping the characteristics of dance, and their average score is 7.27 points for innovativeness.
- The average score of the 10 imagined dance motions is 7.93 points for keeping the characteristics of dance, and their average score is 8.01 points for innovativeness.
- The average score of the 10 created robotic dances is 7.44 points for keeping the characteristics of dance, and their average score is 7.54 points for innovativeness.
6. Discussion
6.1. Robotic Dance Formalization
6.2. The Imagined Dance Elements
6.3. The Limb and Its Constraint
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Rob. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef] [Green Version]
- Lanillos, P.; Dean-Leon, E.; Cheng, G. Yielding self-perception in robots through sensorimotor contingencies. IEEE Trans. Cognit. Dev. Syst. 2017, 9, 100–112. [Google Scholar] [CrossRef]
- Peng, H.; Zhou, C.; Hu, H.; Chao, F.; Li, J. Robotic dance in social robotics—A taxonomy. IEEE Trans. Hum.-Mach. Syst. 2015, 45, 281–293. [Google Scholar] [CrossRef]
- Aucouturier, J.J.; Ikeuchi, K.; Hirukawa, H.; Nakaoka, S.I.; Shiratori, T.; Kudoh, S.; Kanehiro, F.; Ogata, T.; Kozima, H.; Okuno, H.G.; et al. Cheek to chip: Dancing robots and AI’s future. Intell. Syst. 2008, 23, 74–84. [Google Scholar] [CrossRef]
- Or, J. Towards the development of emotional dancing humanoid robots. Int. J. Soc. Robot. 2009, 1, 367–382. [Google Scholar] [CrossRef]
- Shinozaki, K.; Iwatani, A.; Nakatsu, R. Concept and construction of a robot dance system. In Proceedings of the 2007 International Conference on Mechatronics and Information Technology: Mechatronics, MEMS, and Smart Materials (ICMIT 2007), Gifu, Japan, 5–6 December 2007. [Google Scholar]
- Oliveira, J.L.; Reis, L.P.; Faria, B.M.; Gouyon, F. An empiric evaluation of a real-time robot dancing framework based on multi-modal events. Indones. J. Electr. Eng. 2012, 10, 1917–1928. [Google Scholar] [CrossRef]
- De Sousa Junior, S.F.; Campos, M.F.M. Shall we dance? A music-driven approach for mobile robots choreography. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2011), San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Aucouturier, J.J.; Ogai, Y.; Ikegami, T. Making a robot dance to music using chaotic itinerancy in a network of fitzhugh-nagumo neurons. In Proceedings of the 14th International Conference on Neural Information Processing (ICONIP 2007), Kitakyushu, Japan, 13–16 November 2007. [Google Scholar]
- Meng, Q.; Tholley, I.; Chung, P.W.H. Robots learn to dance through interaction with humans. Neural Comput. Appl. 2014, 24, 117–124. [Google Scholar] [CrossRef]
- Vircikova, M.; Sincak, P. Dance Choreography Design of Humanoid Robots using Interactive Evolutionary Computation. In Proceedings of the 3rd Workshop for Young Researchers on Human-Friendly Robotics (HFR 2010), Tübingen, Germany, 28–29 October 2010. [Google Scholar]
- Vircikova, M.; Fedor, Z.; Sincak, P. Design of verbal and non-verbal Human-Robot Interactive System. In Proceedings of the 11th IEEE-RAS International Conference on Humanoid Robots, Bled, Slovenia, 26–28 October 2011. [Google Scholar]
- Vircikova, M.; Sincak, P. Discovering art in robotic motion: from imitation to innovation via interactive evolution. In Proceedings of the Ubiquitous Computing and Multimedia Applications, Daejeon, Korea, 13–15 April 2011; pp. 183–190. [Google Scholar]
- Vircikova, M.; Sincak, P. Artificial Intelligence in Humanoid Systems, Academia.edu 2010. Available online: https://s3.amazonaws.com/academia.edu.documents/4372061/englishabstract.pdf?AWSAccessKeyId=AKIAIWOWYYGZ2Y53UL3A&Expires=1539072728&Signature=5Ba0S41wxZOZwLUFdzEvXsQL9AA%3D&response-content-disposition=inline%3B%20filename%3DArtificial_Intelligence_in_Humanoid_Syst.pdf (accessed on 10 October 2018).
- Peng, H.; Hu, H.; Chao, F.; Zhou, C.; Li, J. Autonomous robotic choreography creation via semi-interactive evolutionary computation. Int. J. Soc. Robot. 2016, 8, 649–661. [Google Scholar] [CrossRef]
- Eaton, M. An approach to the synthesis of humanoid robot dance using non-interactive evolutionary techniques. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics (SMC 2013), Manchester, UK, 13–16 October 2013. [Google Scholar]
- Xia, G.; Tay, J.; Dannenberg, R.; Veloso, M. Autonomous robot dancing driven by beats and emotions of music. In Proceedings of the 11th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2012), Valencia, Spain, 4–8 June 2012. [Google Scholar]
- Manfrè, A.; Infantino, I.; Vella, F.; Gaglio, S. An automatic system for humanoid dance creation. Biol. Inspired Cognit. Archit. 2016, 15, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Krasnow, D.; Chatfield, S.J. Development of the ‘Performance Competence Evaluation Measure’ Assessing Qualitative Aspects of Dance Performance. J. Danc. Med. Sci. 2009, 13, 101–107. [Google Scholar]
- He, Q. The Thinking of Dance Creation; China Book Press: Beijing, China, 2013. (In Chinese) [Google Scholar]
- He, Q. The Thinking of Dance Nature; China Book Press: Beijing, China, 2015. (In Chinese) [Google Scholar]
- Chen, J.; Adamson, C. Innovation: Integration of random variation and creative synthesis. Acad. Manag. Rev. 2015, 40, 461–464. [Google Scholar] [CrossRef]
- Zhou, H. Random Uncertainty of Art. Soc. Sci. Guangdong 1992, 6, 49–54. (In Chinese) [Google Scholar]
- Kudoh, S.; Shiratori, T.; Nakaoka, S.; Nakazawa, A.; Kanehiro, F.; Ikeuchi, K. Entertainment robot: Learning from observation paradigm for humanoid robot dancing. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2008), Nice, France, 22–26 September 2008. [Google Scholar]
- Lei, J.; Song, M.; Li, Z.N.; Chen, C. Whole-body humanoid robot imitation with pose similarity evaluation. Signal Process. 2015, 108, 136–146. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Meaning | Expressive Form | Remarks |
|---|---|---|---|
| J | The set of Joints | J = {J1, J2, …, J|J|} | Ji indicates the ith joint of humanoid robot. |
| D | The set of Domains on Joints | D = {D1, D2, …, D|J|} | Di indicates the domain of the ith joint. |
| L | The set of Limbs | L = {L1, L2, …, L|L|} | Li indicates the ith limb of humanoid robot. |
| C | The set of constraints | C = {C1, C2, …, C|L|} | Ci indicates the constraint on the ith limb &Ci ∈ {0,1}. |
| DE | Dance Element | DEi = (Vi,1, Vi,2, …, Vi,|Li|) | DEi indicates the dance element vector on Li, and Vi,t is a value of the tth joint of Li. |
| DP | Dance Pose | DP = (DE1, DE2, …, DE|L|) | The dance pose vector DP that contains the dance elements on all the limbs of humanoid robot. |
| DM | Dance Motion | DM = (DP1, DP2, …, DPY) | The dance motion vector DM is a sequence of DP that has a length of Y. |
| RD | Robotic Dance | RD = (DM1, DM2, …, DMZ) | The robotic dance vector RD is a sequence of DM that has a length of Z. |
| Name | Nickname | Constraint | The Set of Joints Contained in The Limb |
|---|---|---|---|
| L1 | Head | C1 = 0 | {HeadYaw, HeadPitch} |
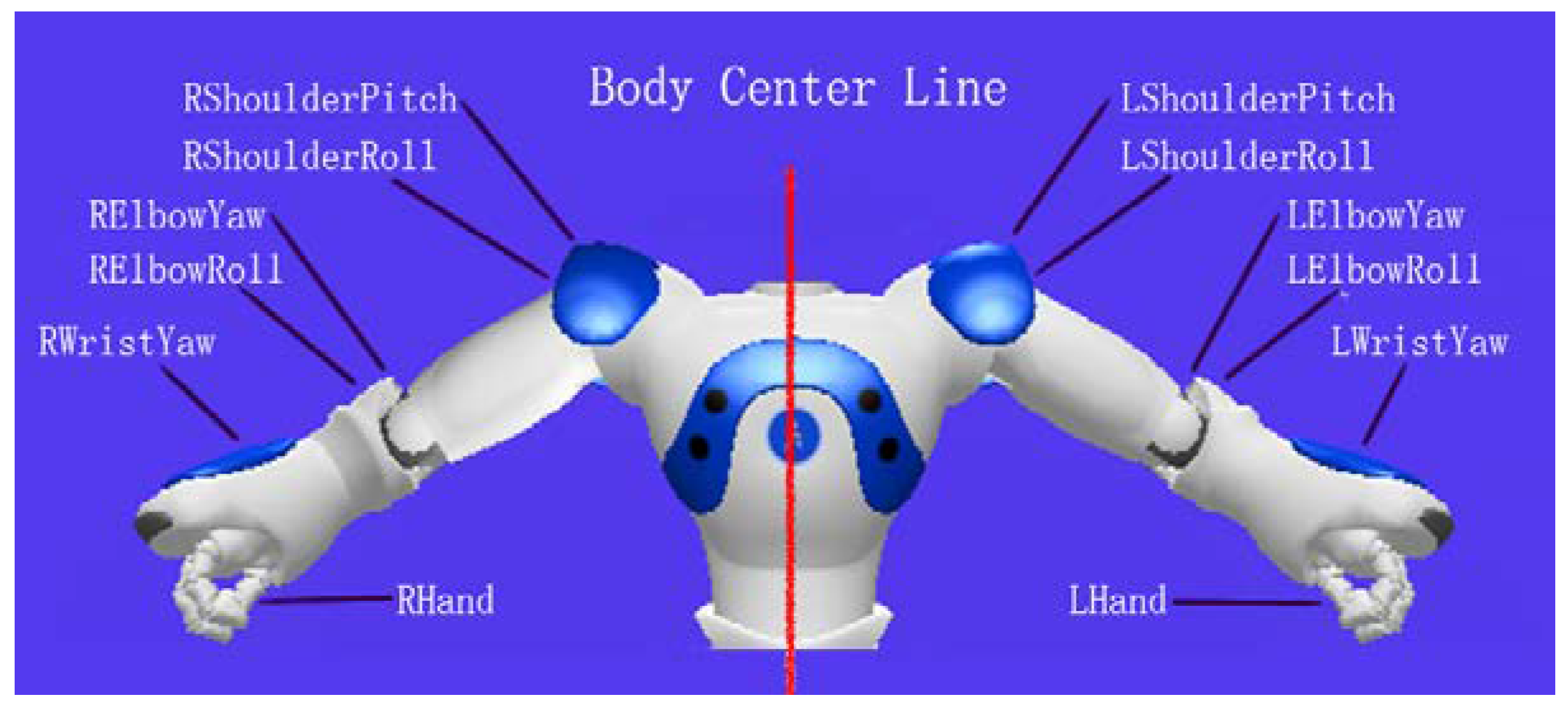
| L2 | Upperbody | C2 = 0 | {LShoulderPitch, LShoulderRoll, LElbowYaw, LElbowRoll, LWristYaw, RShoulderPitch, RShoulderRoll, RElbowYaw, RElbowRoll, RWristYaw} |
| L3 | Hand | C3 = 1 | {LHand, RHand} |
| L4 | Lowerbody | C4 = 1 | {LHipYawPitch, LHipRoll, LHipPitch, LKneePitch, LAnklePitch, LAnkleRoll, RHipYawPitch, RHipRoll, RHipPitch, RKneePitch, RAnklePitch, RAnkleRoll } |
| Dance Object | Preservation of Tibetan Tap’s Characteristics | Innovation |
|---|---|---|
| Dance element (Head) | Head swings harmoniously with body’s movement, and head presents the status of natural relaxation. | The amplitude, range and direction of head swing have changed reasonably. |
| Dance element (Upperbody) | Upper body stays relaxed and leans forward slightly; and arms swing leisurely around (beside) crotch. | The amplitude, range and direction of arm swing have changed reasonably. |
| Dance pose | Dance pose is steady, vigorous, enthusiastic, free and easy; upper body stays relaxed and leans forward slightly; and the overall shape fits in with the carefree and leisurely personality trait of Tibetan folk dance. | There are innovation and breakthrough in the aspects of pose fluidity and shape variability. |
| Dance motion | Knees are loose and elastic, and steps are flexible. Dance poses are concatenated reasonably to form a dance motion, in which upper body movement coordinates rigorously with lower body movement, and it has a certain expression. The simple, free, swift and nimble Tibetan characteristics have been expressed sharply. | There are different embodiments in the variety of motion, rhythm, velocity and power. |
| Robotic dance | In robotic dance, the moving of gravity center, which is formed by regular quiver and regular step, drives the loose upper limb movement. Robotic dance has clear movement rhythm of quiver, and has holistic and agglomerate kinesthesia. The Tibetan characteristics of honesty and depth have been expressed sharply. | There are natural and smooth cohesions between two adjacent dance motions. Furthermore, there are some innovations in the aspects of cadenced rhythm, interlaced step, and varied motion combinations. |
| Dance Object | Preservation of Tibetan Tap’s Characteristics (Average Score/Level) | Innovation (Average Score/Level) | Preservation of Tibetan Tap’s Characteristics (Standard Deviation) | Innovation (Standard Deviation) |
|---|---|---|---|---|
| Dance element (Head) | 7.30/general | 7.55/good | 1.21 | 1.32 |
| Dance element (Upperbody) | 7.72/good | 7.39/general | 1.21 | 1.41 |
| Dance pose | 8.01/good | 7.27/general | 1.07 | 0.82 |
| Dance motion | 7.93/good | 8.01/good | 1.18 | 0.78 |
| Robotic dance | 7.44/general | 7.54/good | 0.31 | 0.27 |
| Dance Expressive Space in This Paper | Dance Motions Formalization in [17] | Remarks |
|---|---|---|
| Joint (Ji) | Joint | Equivalence |
| Value of joint (V) | Value of joint (V) | Equivalence |
| Domain (Di) | Difference | |
| Limb (Li) | Category of joints (c) | Equivalence |
| Constraint (Ci) | Difference | |
| Dance element (DEi) | Keyframe (Kc) | Equivalence |
| Dance pose (DPi) | Difference | |
| Dance motion (DMi) | Motion primitive (Mc) | Equivalence |
| Schedule of motion primitives (Sc) | Difference | |
| Robotic dance (RD) | The assembly on all the schedule of motion primitives {SHead, SLArm, SRArm, SLegs} ) | Equivalence |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, H.; Li, J.; Hu, H.; Zhou, C.; Ding, Y. Robotic Choreography Inspired by the Method of Human Dance Creation. Information 2018, 9, 250. https://doi.org/10.3390/info9100250
Peng H, Li J, Hu H, Zhou C, Ding Y. Robotic Choreography Inspired by the Method of Human Dance Creation. Information. 2018; 9(10):250. https://doi.org/10.3390/info9100250
Chicago/Turabian StylePeng, Hua, Jing Li, Huosheng Hu, Changle Zhou, and Yulong Ding. 2018. "Robotic Choreography Inspired by the Method of Human Dance Creation" Information 9, no. 10: 250. https://doi.org/10.3390/info9100250
APA StylePeng, H., Li, J., Hu, H., Zhou, C., & Ding, Y. (2018). Robotic Choreography Inspired by the Method of Human Dance Creation. Information, 9(10), 250. https://doi.org/10.3390/info9100250