
Some Aspects of the Effects of Dry Friction Discontinuities on the Behaviour of Dynamic Systems

 , , and
, , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
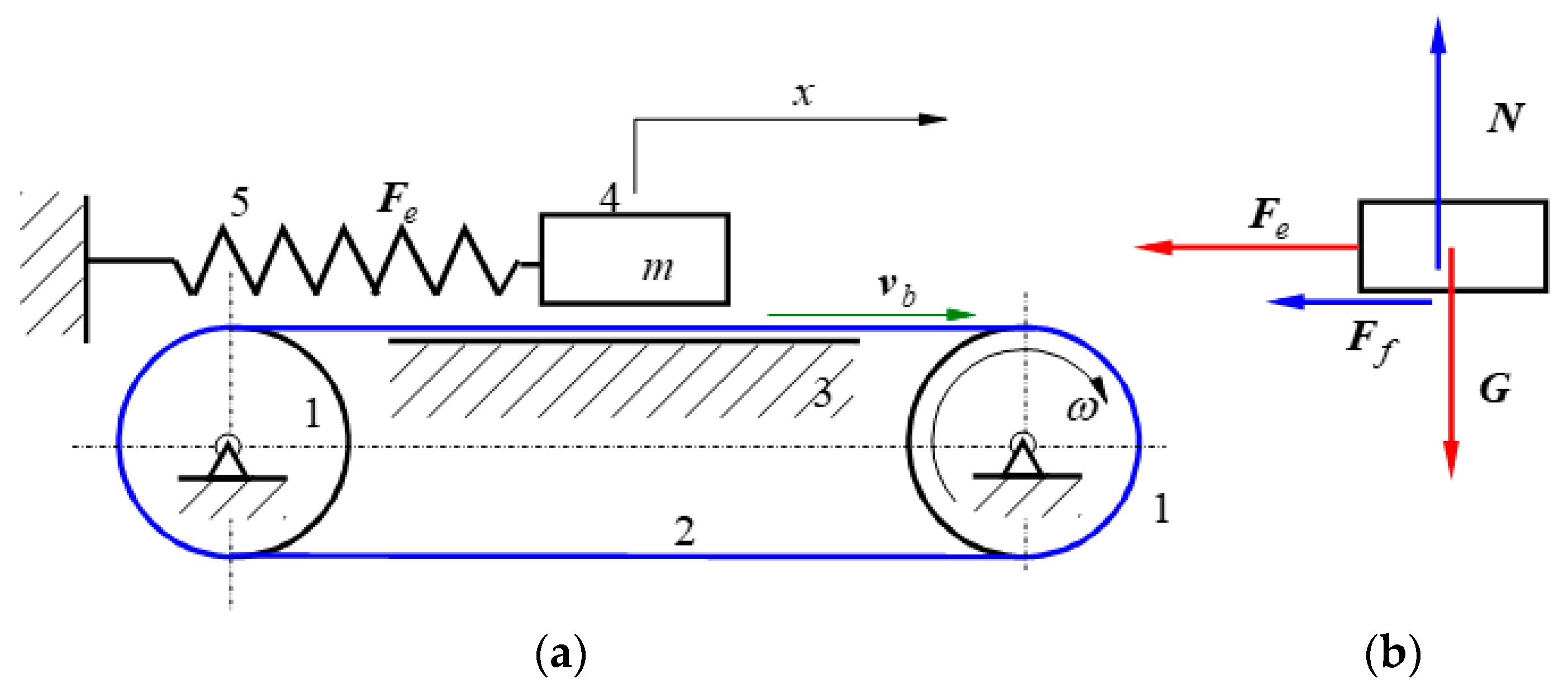
1.1. Classic Dynamic System with Friction
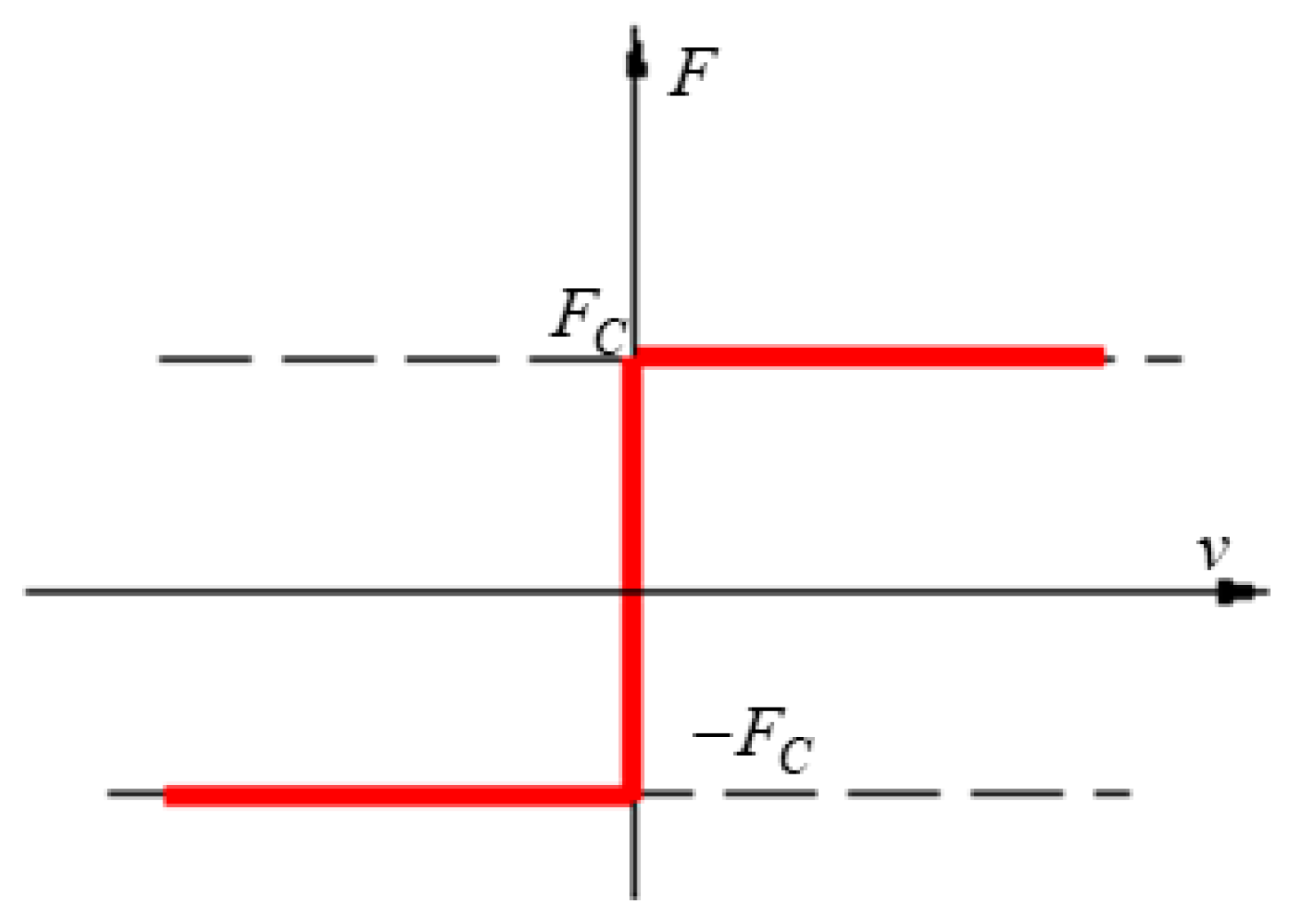
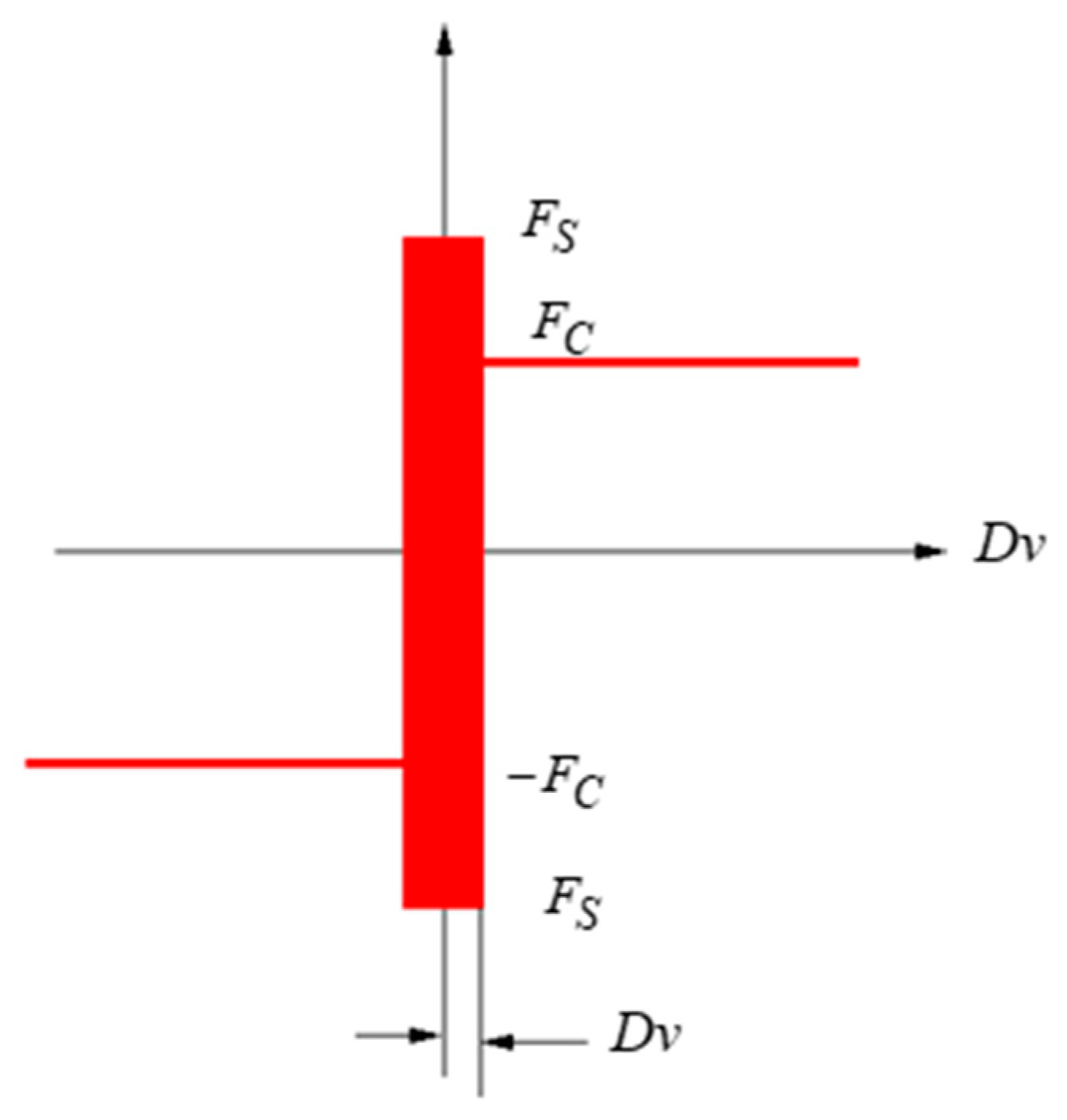
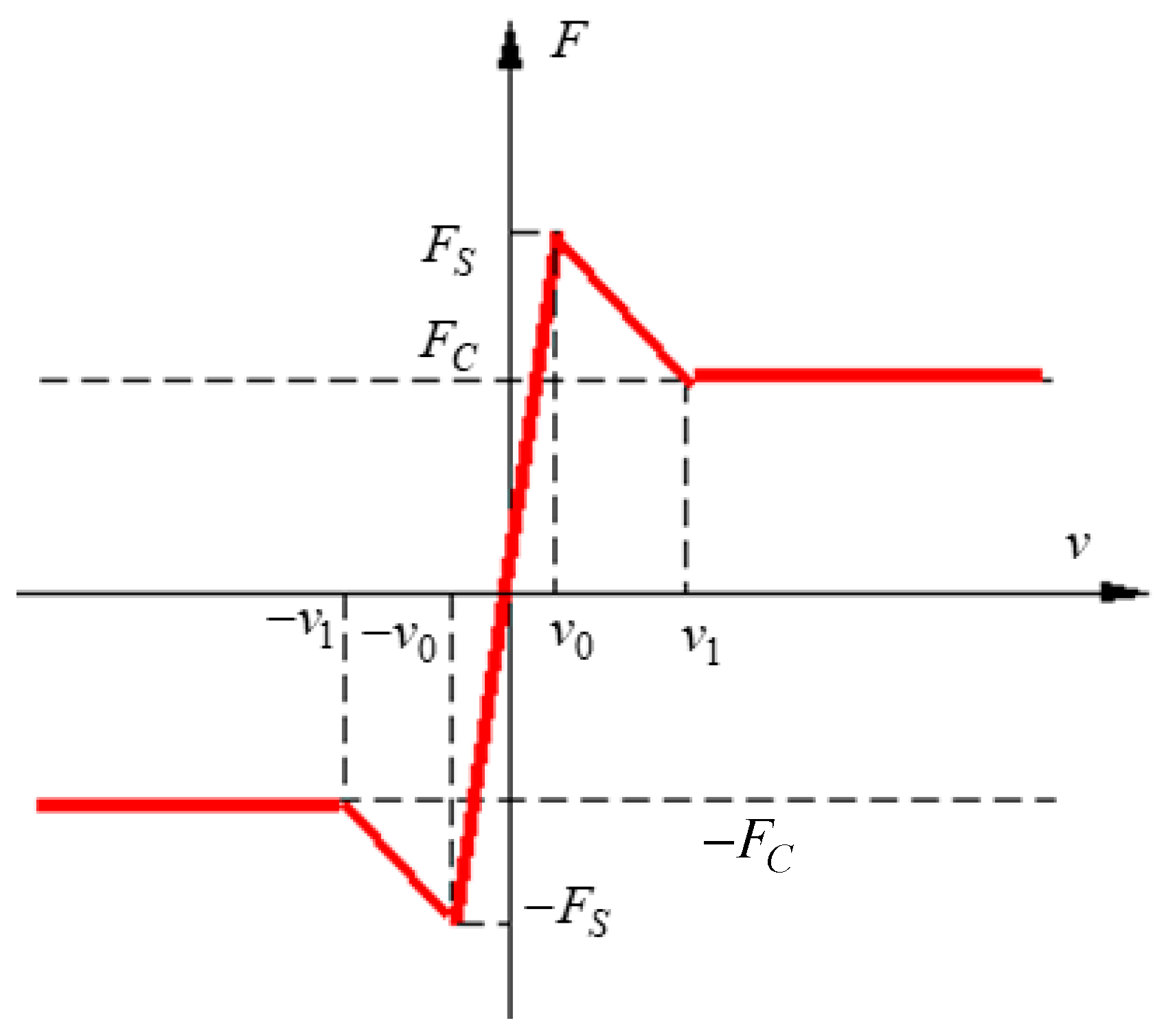
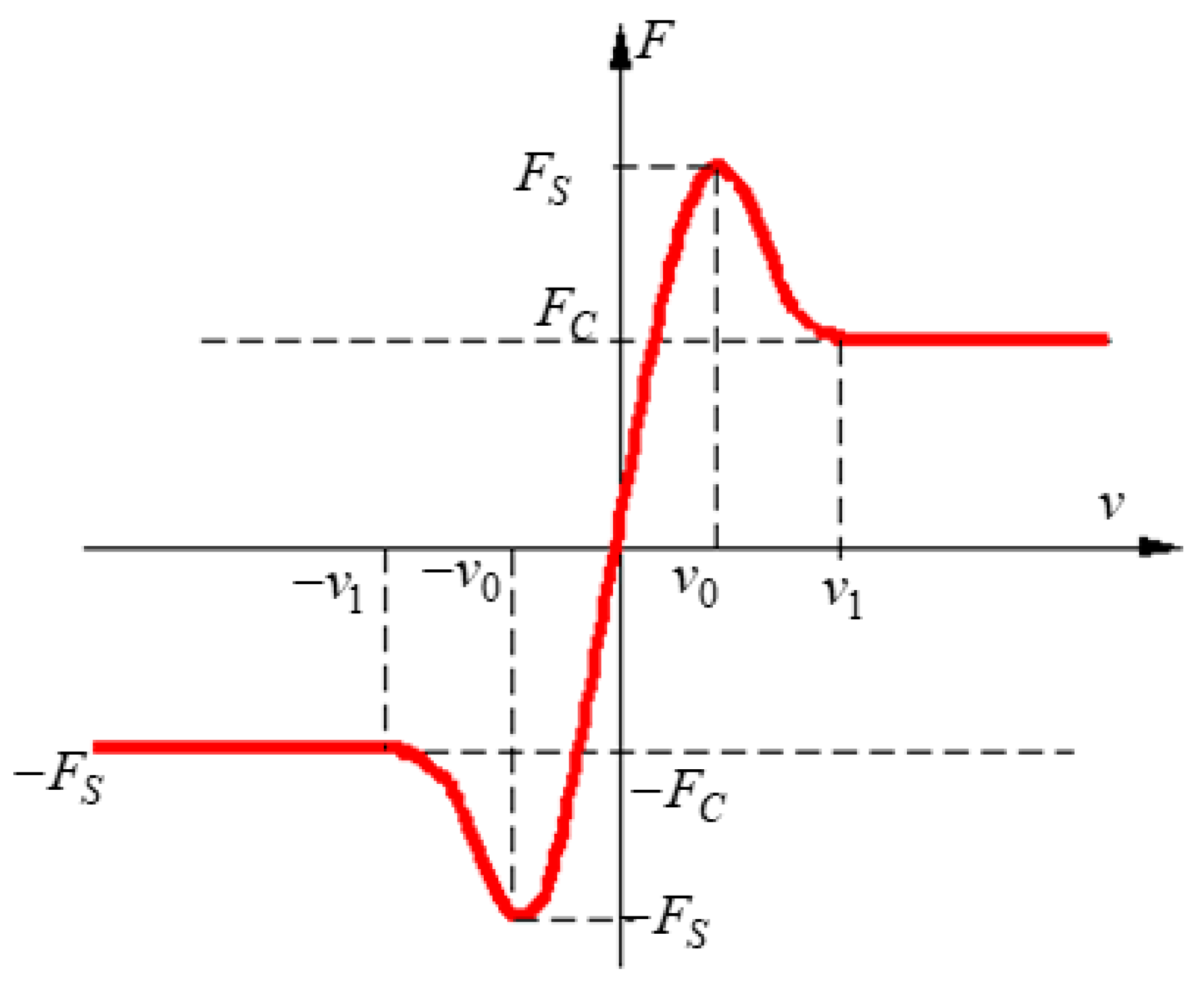
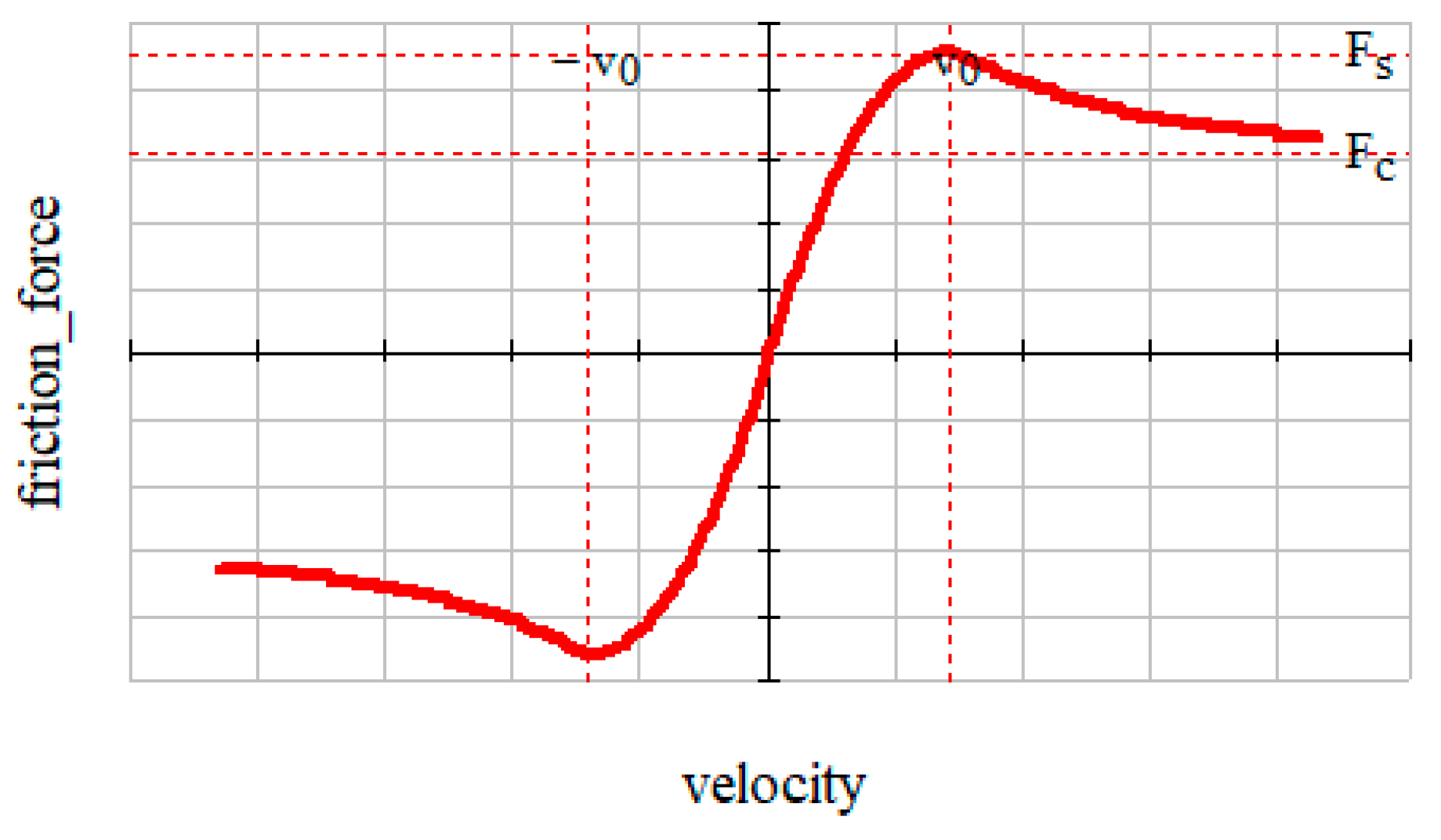
1.2. Dry Friction Models
- The possibility of multiple values for the friction force in the case of the absence of relative motion, as Pennestri et al. [9] affirm: “In kinematic pairs with no relative motion the computation of friction forces is not straightforward”;
- The discontinuities of friction force in the vicinity of origin, where “Friction force discontinuity is a challenge for the numerical integration procedure” [9].
1.3. Choosing the Friction Model
- Oscillatory motion;
- Revolving motion;
- Motion with disruption of the upper contact.
2. Materials and Methods
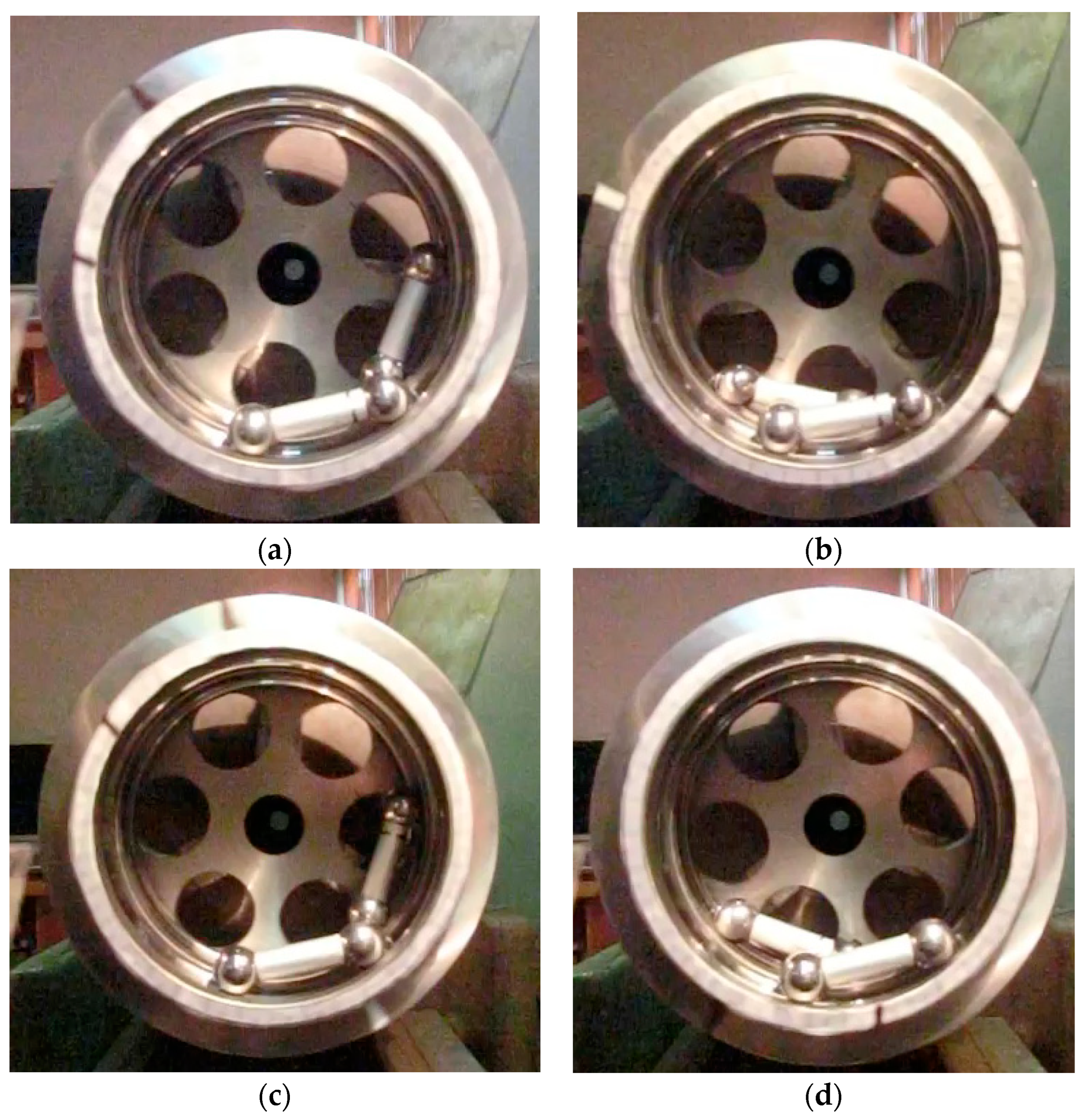
2.1. Experimental Evidence
2.2. Proposed Mathematical Model
3. Results and Discussion
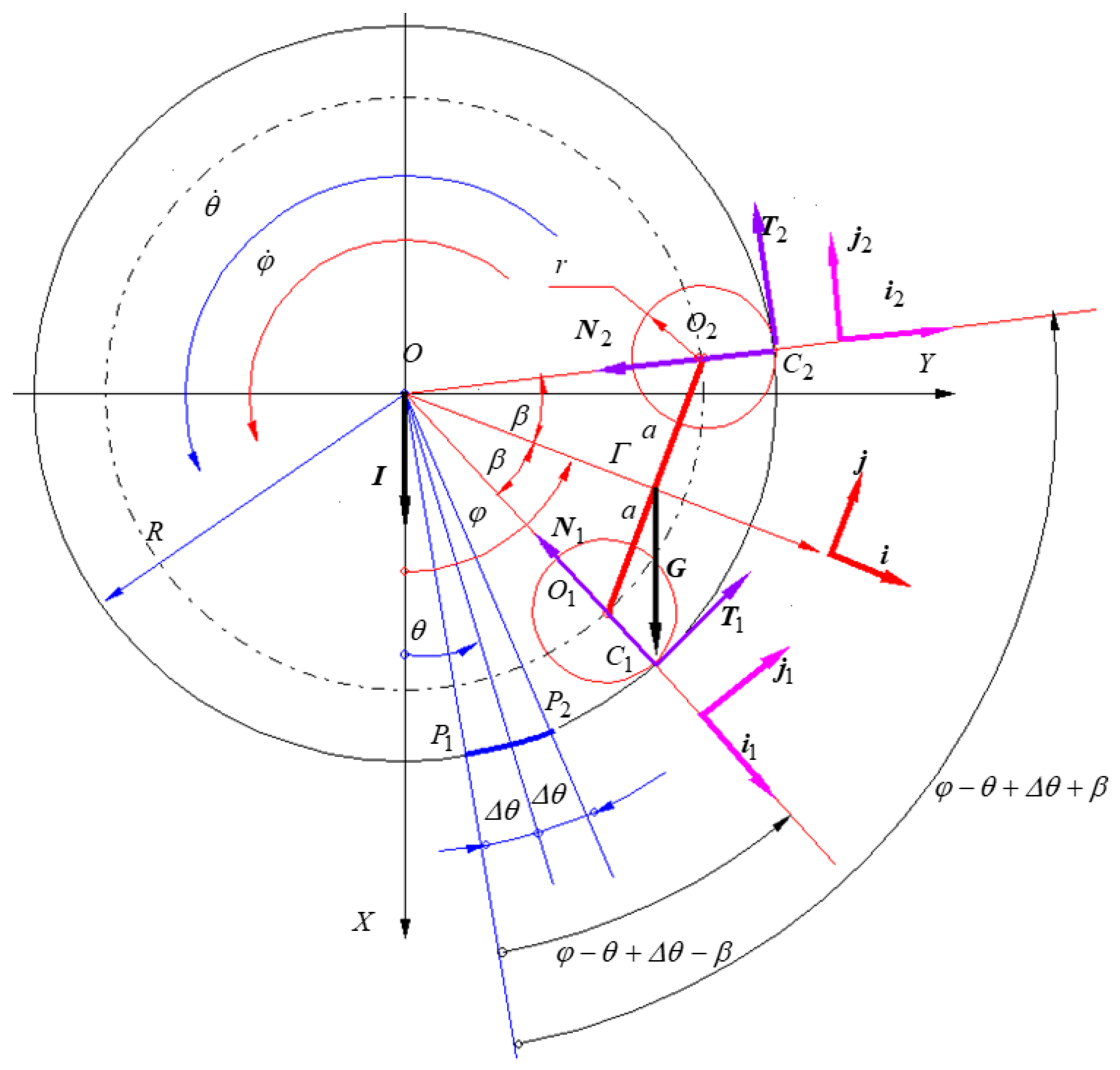
- Geometries (ring radius R, balls radius r, distance between the centres of the balls a;
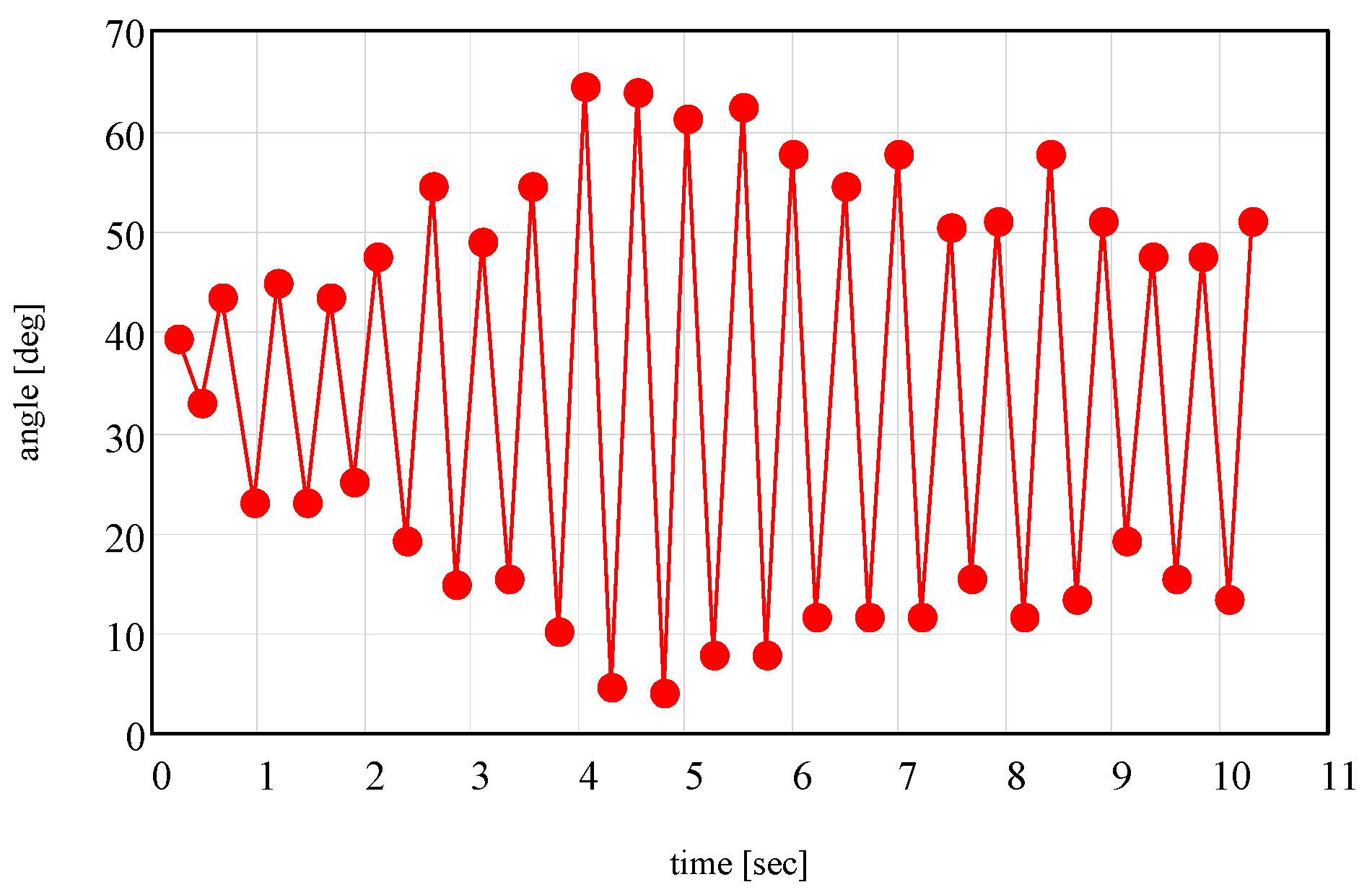
- Laws of motion of the ring ;
- Other characteristics: coefficients of friction , , , ; ratio ) between the dimensions of the two regions with different coefficients of friction; velocity of transition from static to dynamic friction regime .
4. Conclusions
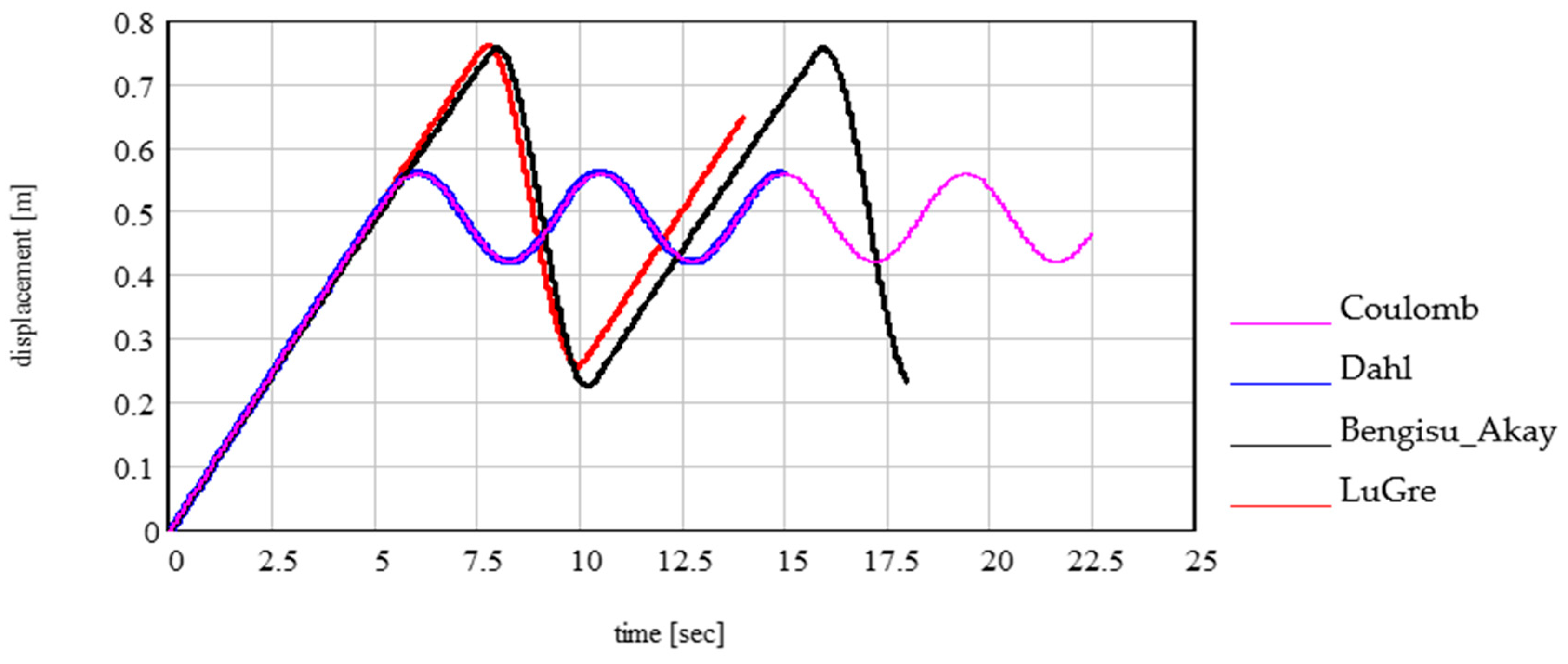
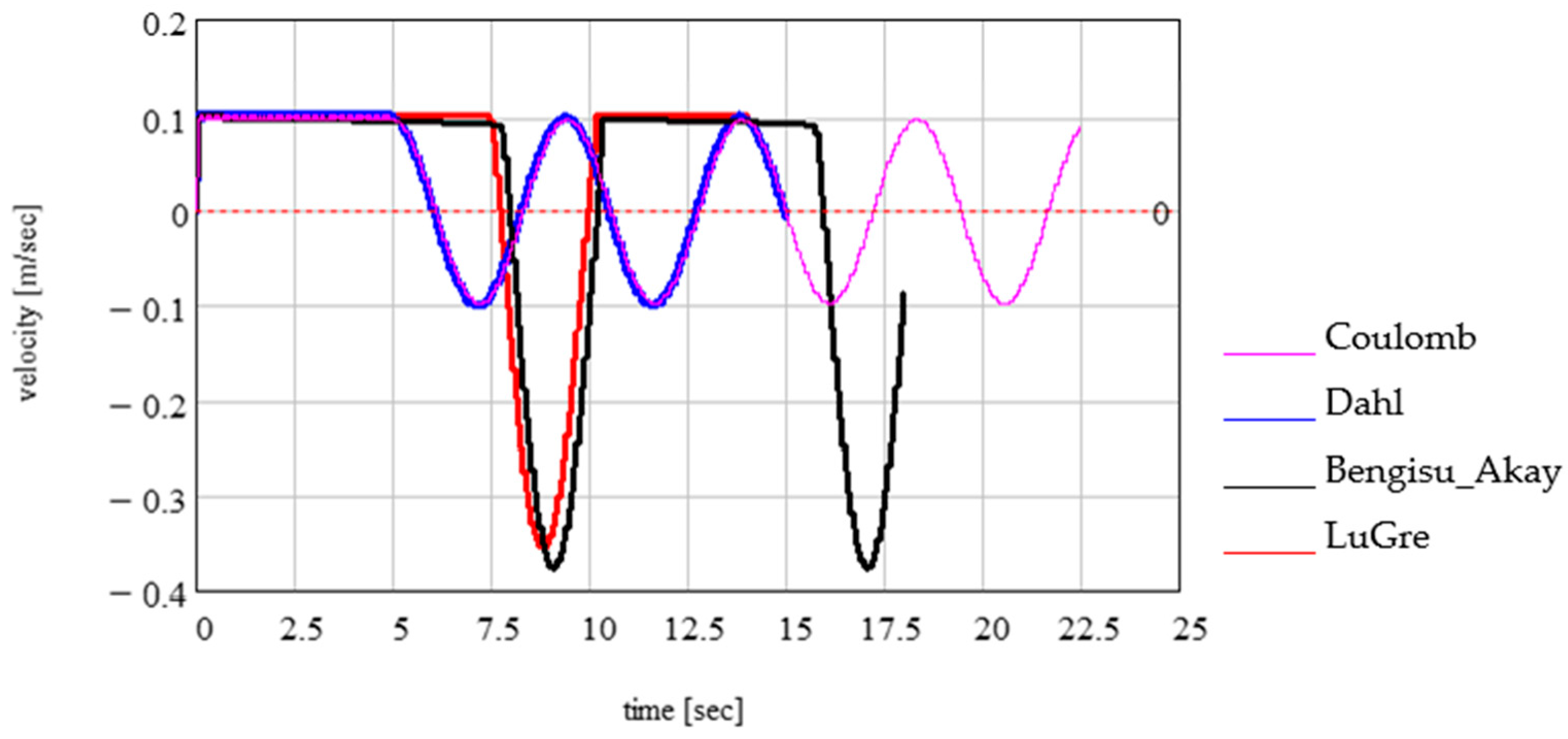
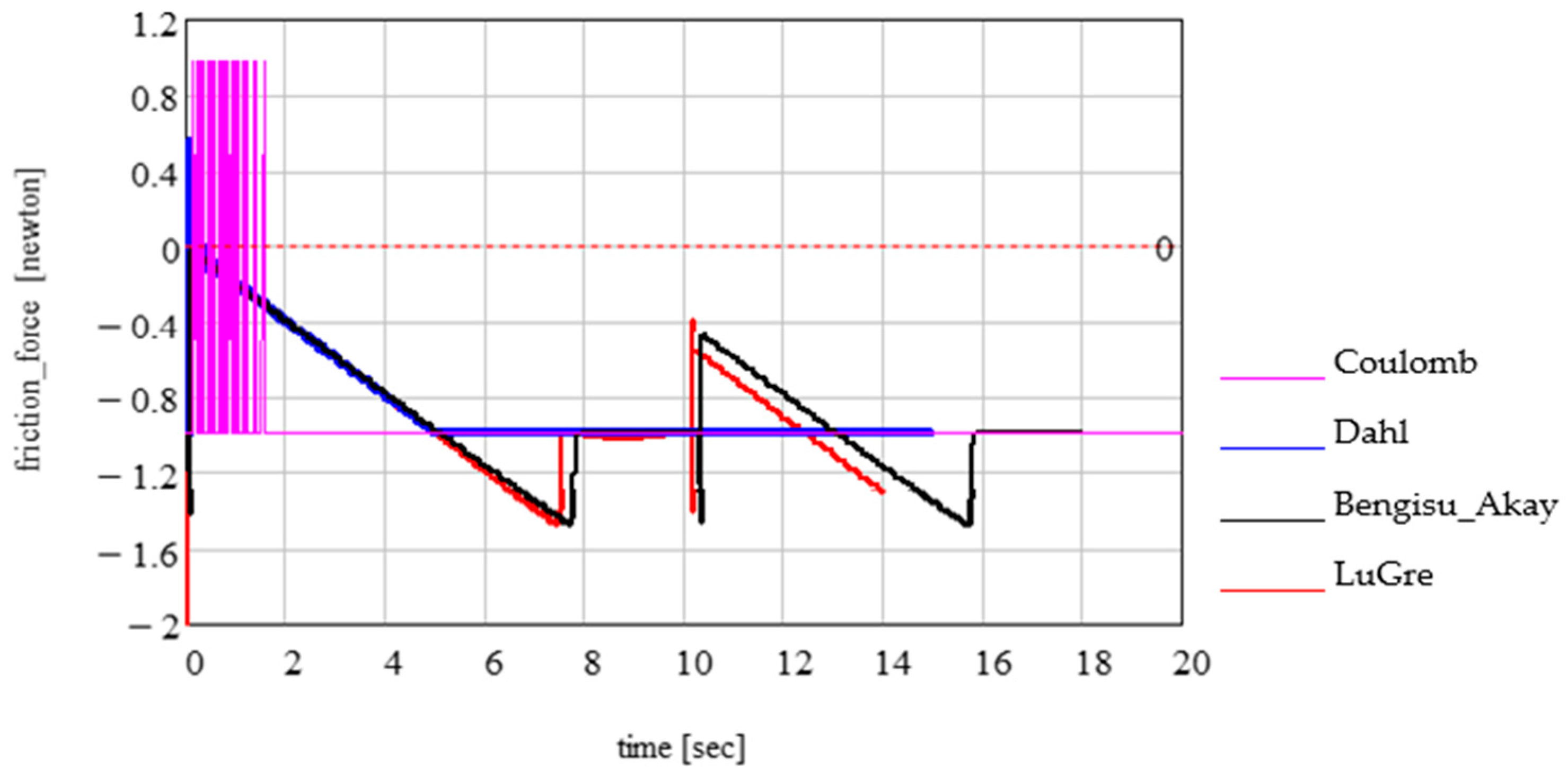
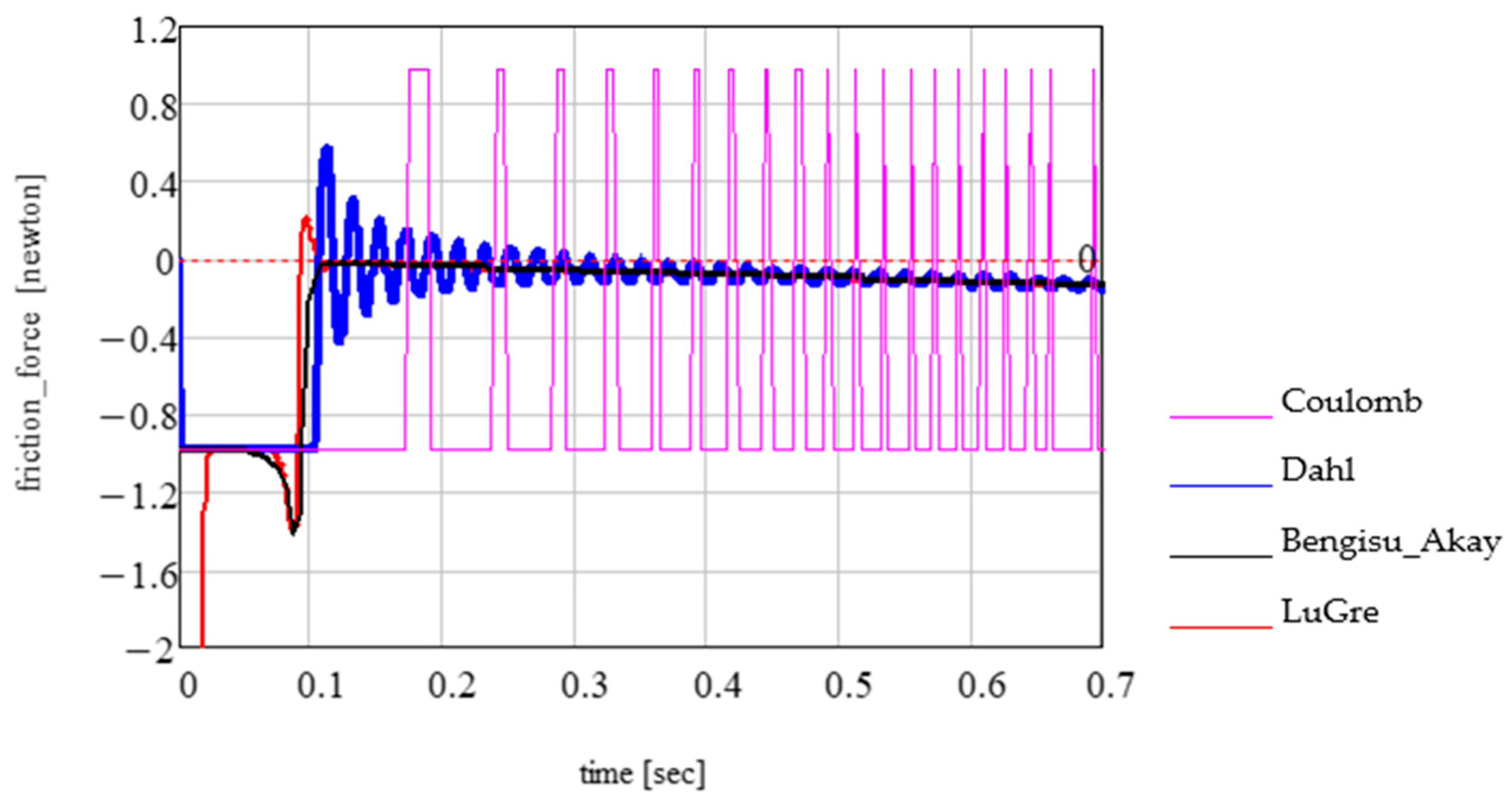
- In the introductory section, we presented a few widely known friction models; then, four of the models (Coulomb, Bengisu–Akay, Dahl, and LuGre) were analysed for a recognised dynamic system for unidirectional motion: a body on a mobile rough conveyor belt elastically coupled to the ground via a spring.
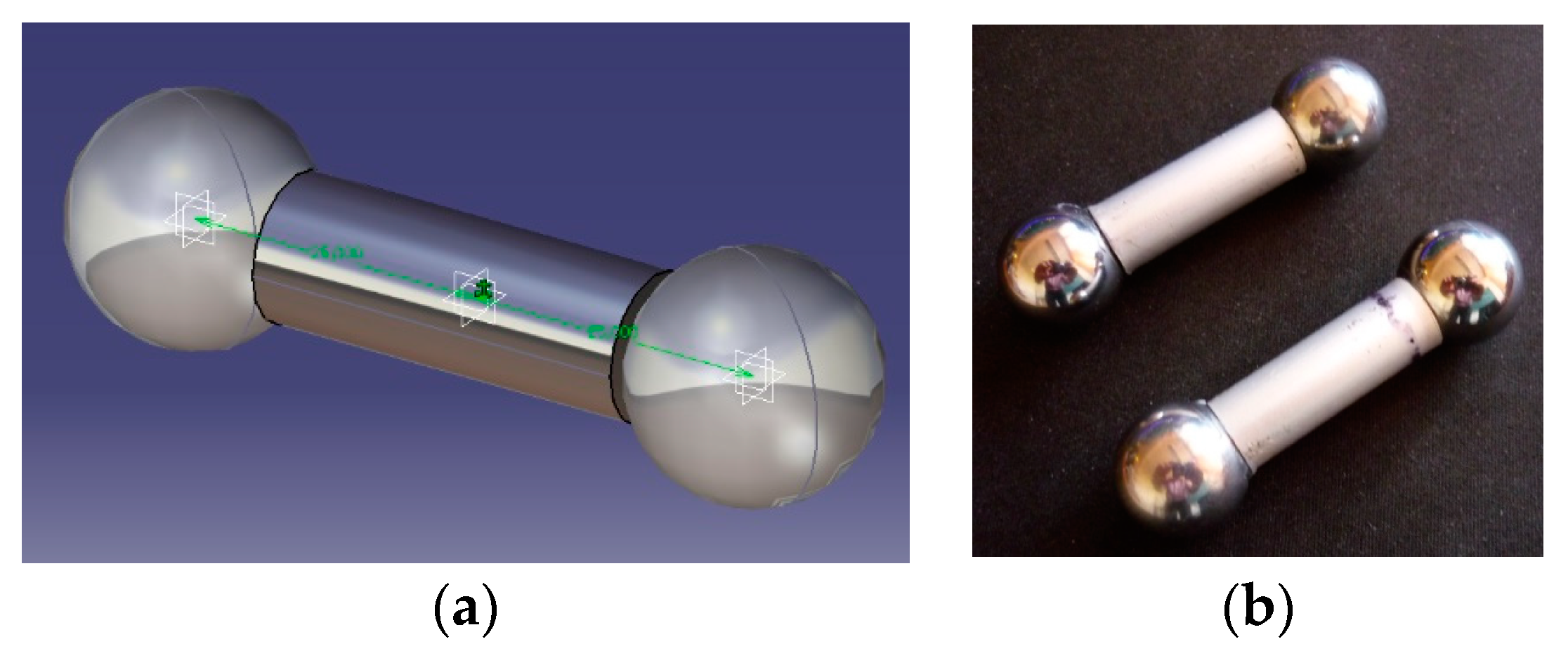
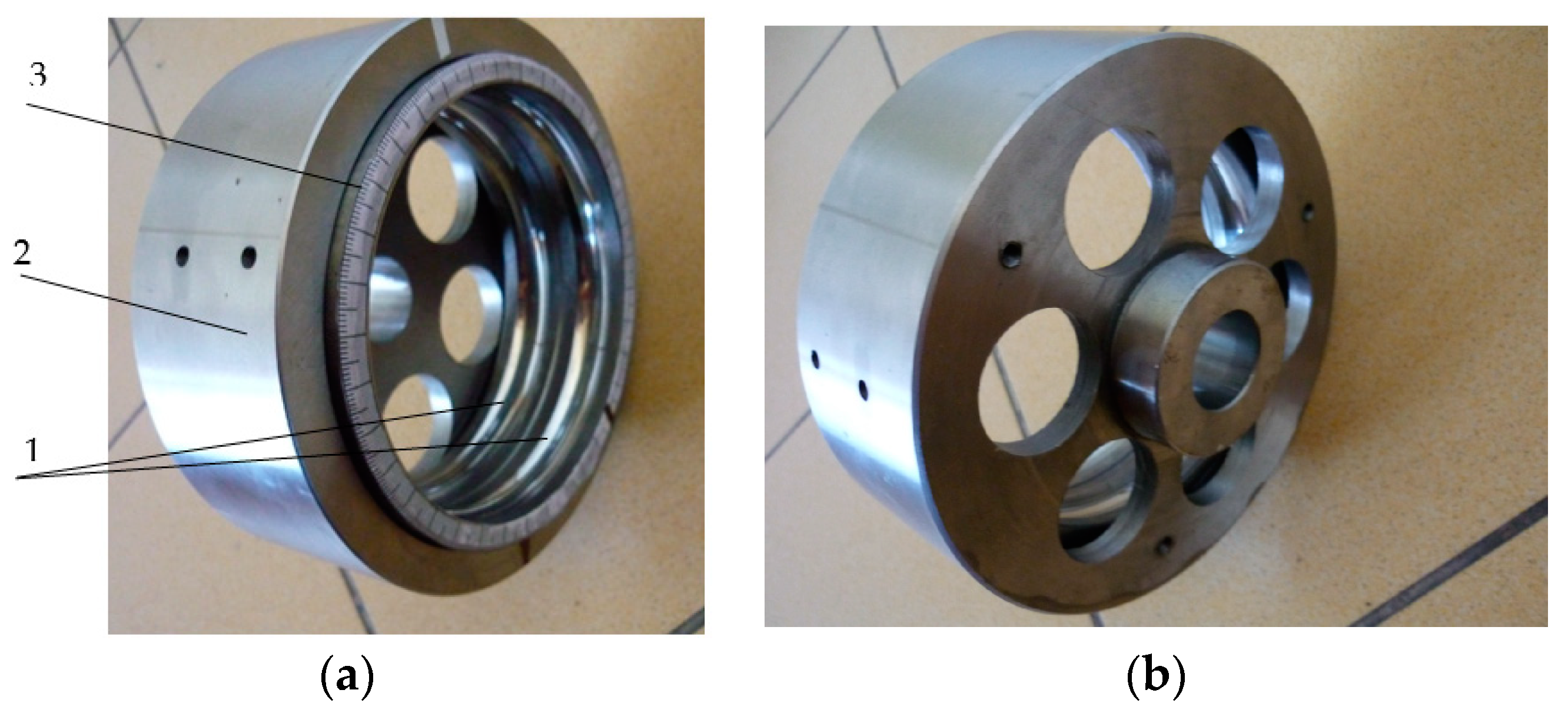
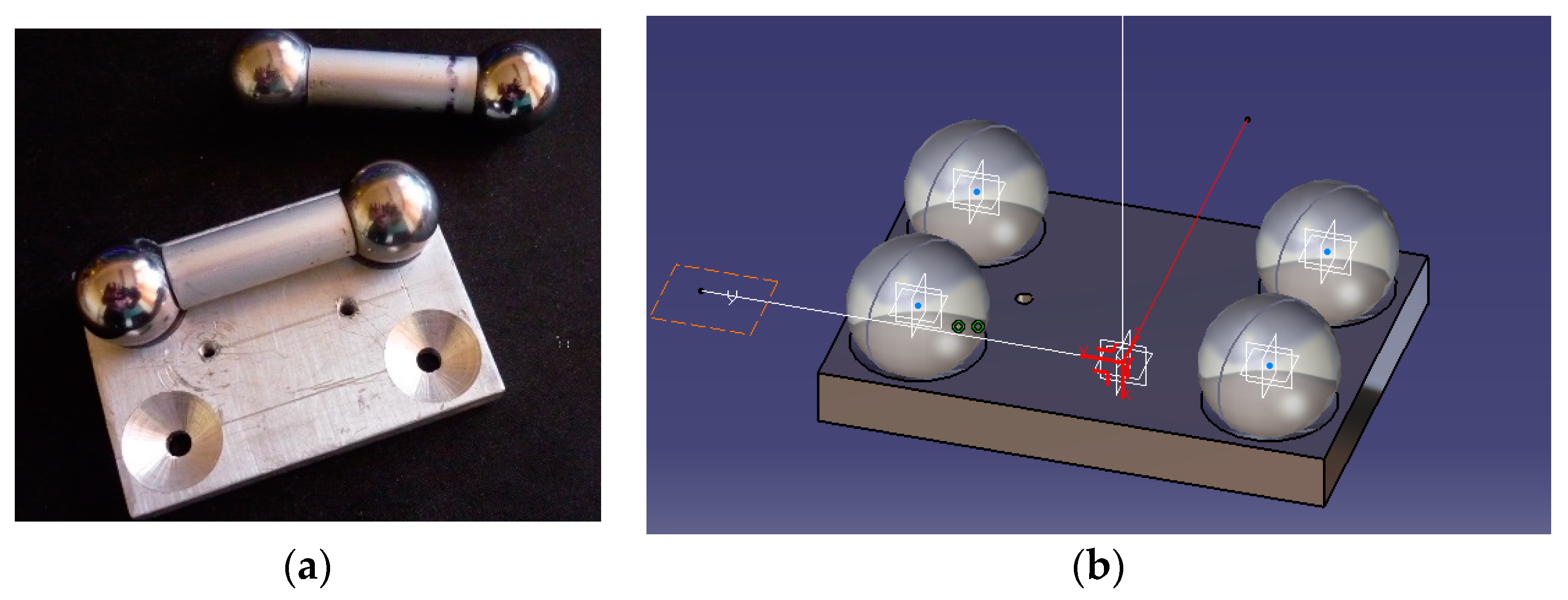
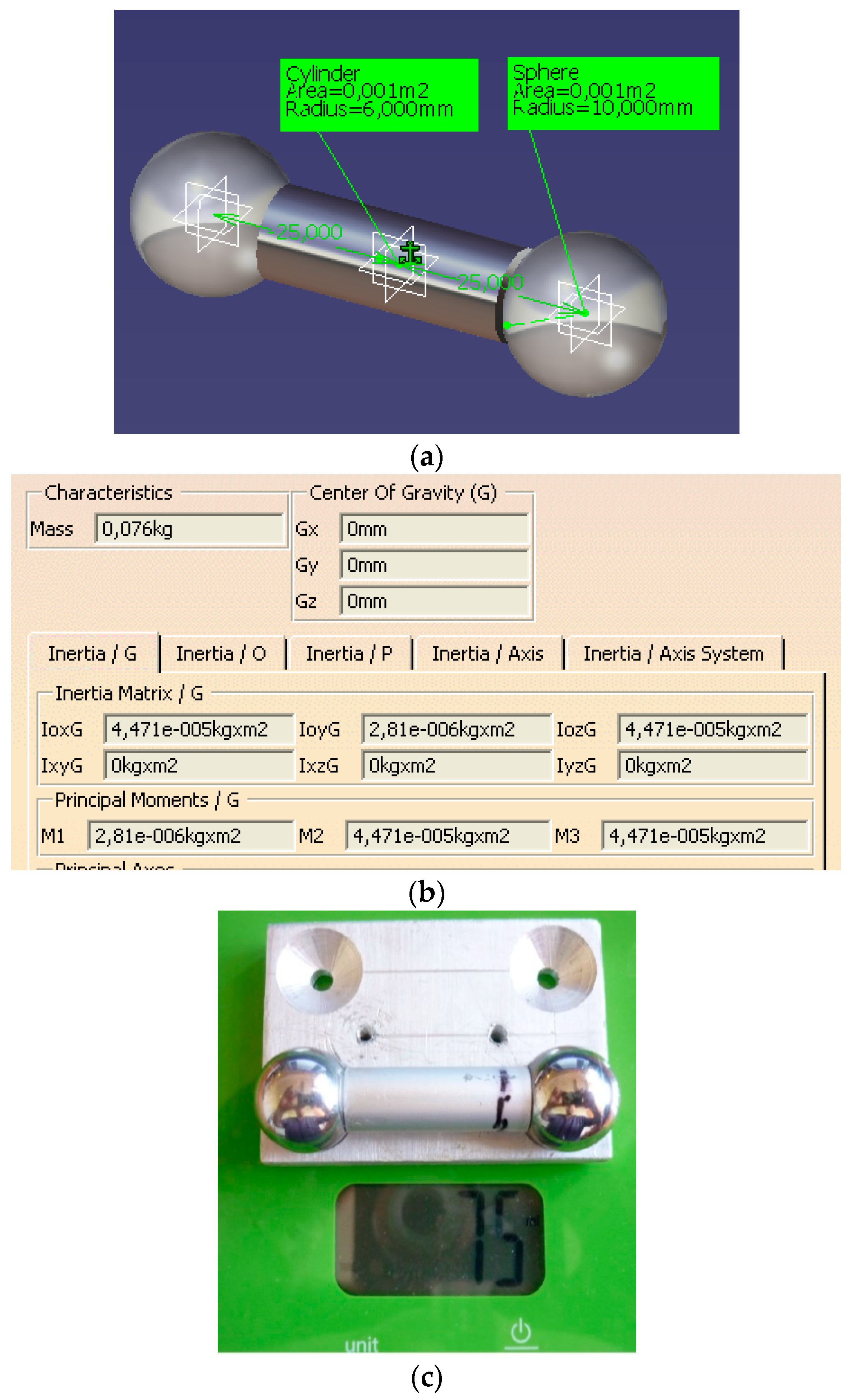
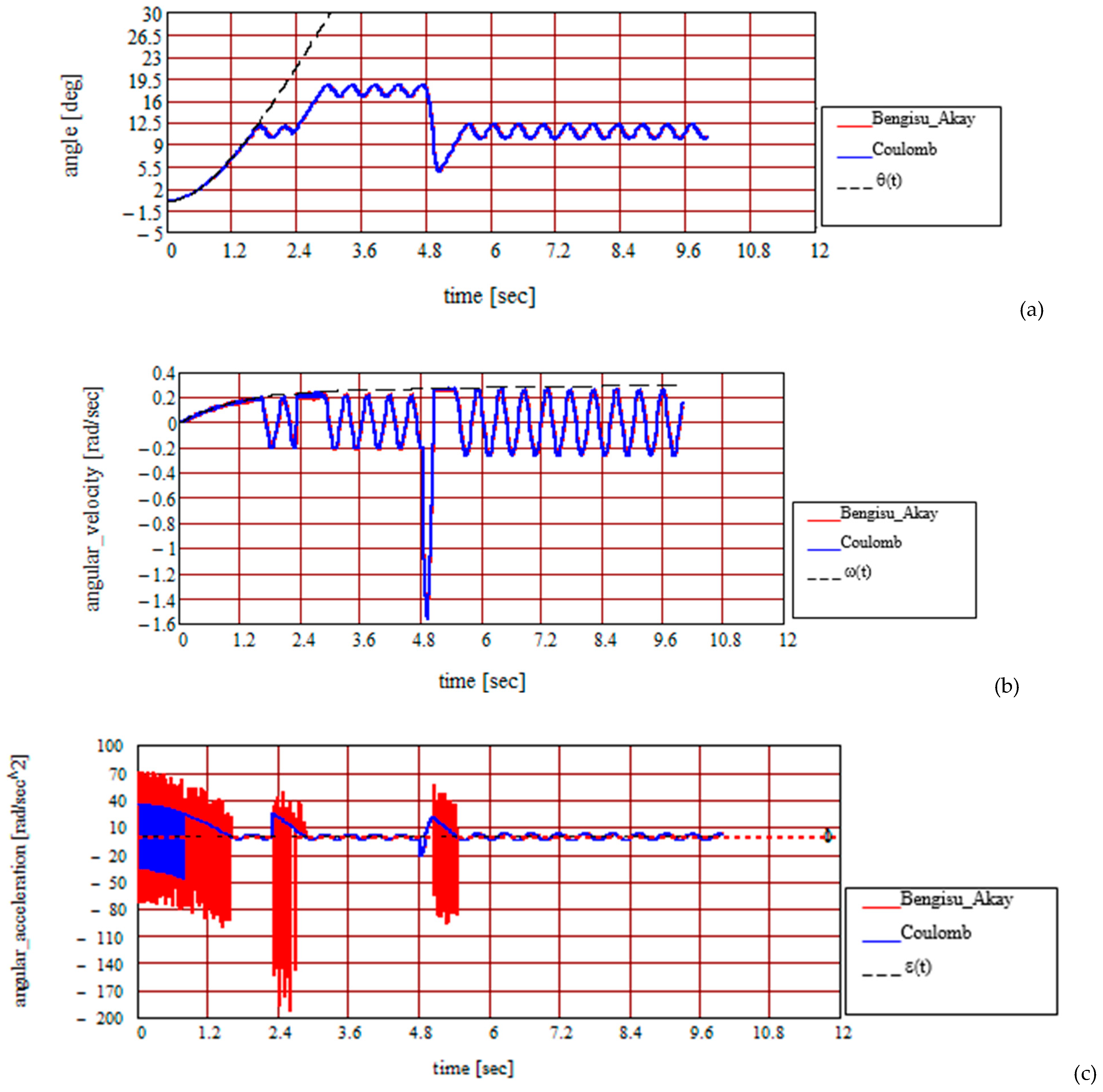
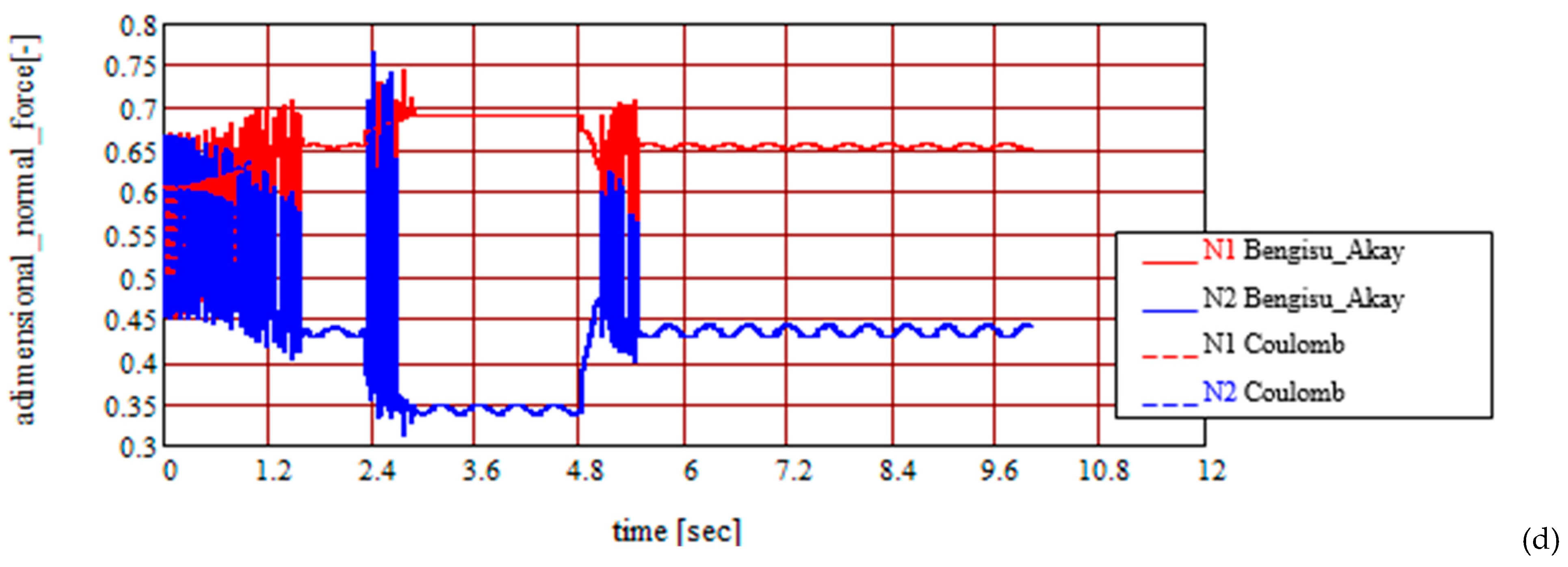
- We proposed a mathematical model for a dynamic system with dry friction. Two identical balls connected by a rod, contacting the inner surface of a metallic cylinder that rotates about a horizontal axis, obey a known law. The surface of the cylinder presents regions with different roughnesses.
- The unknowns of the problem of the body performing plane-parallel motion are the position angle of the axis of symmetry of the mobile body and the magnitudes of the normal reactions from the contact points.
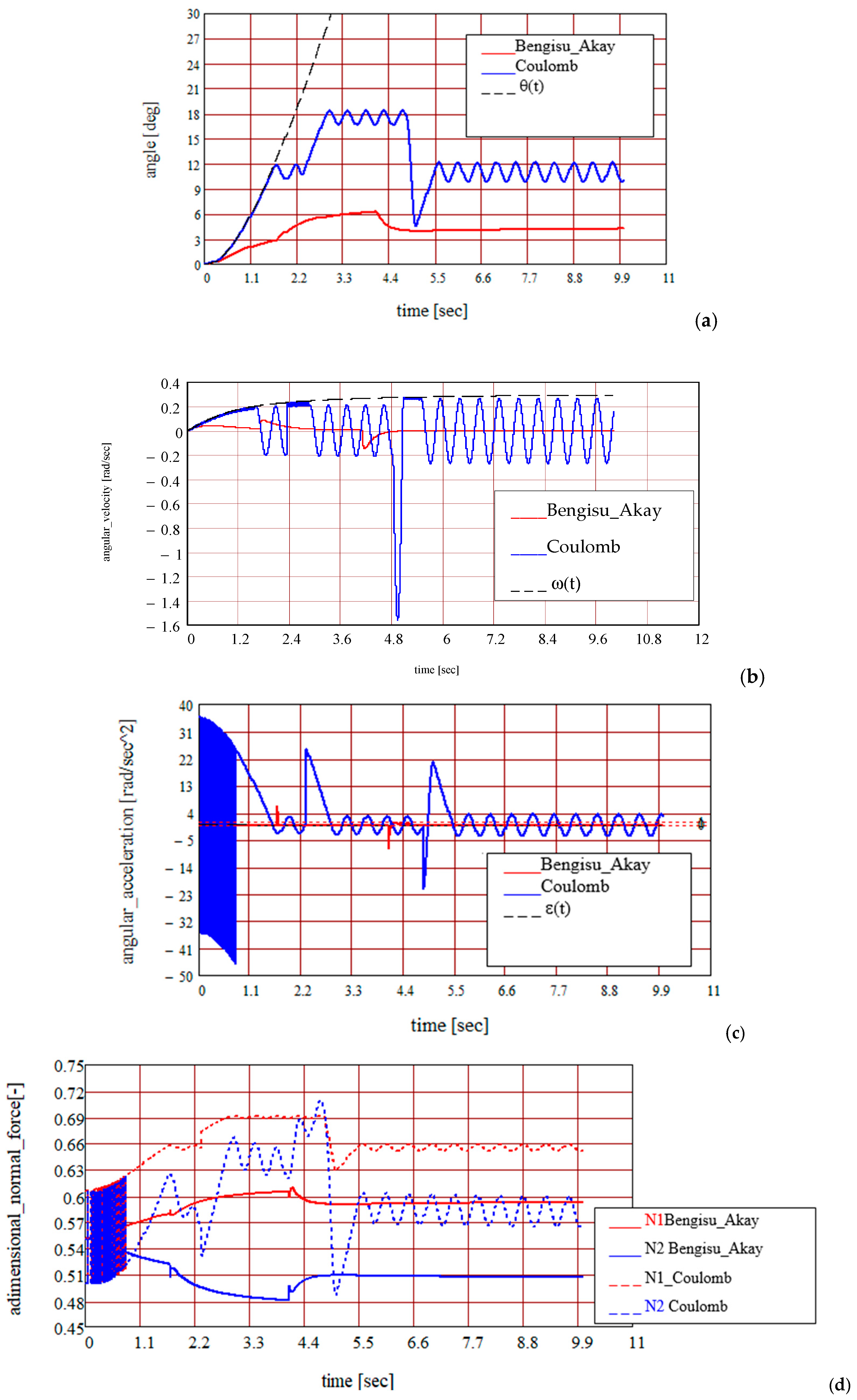
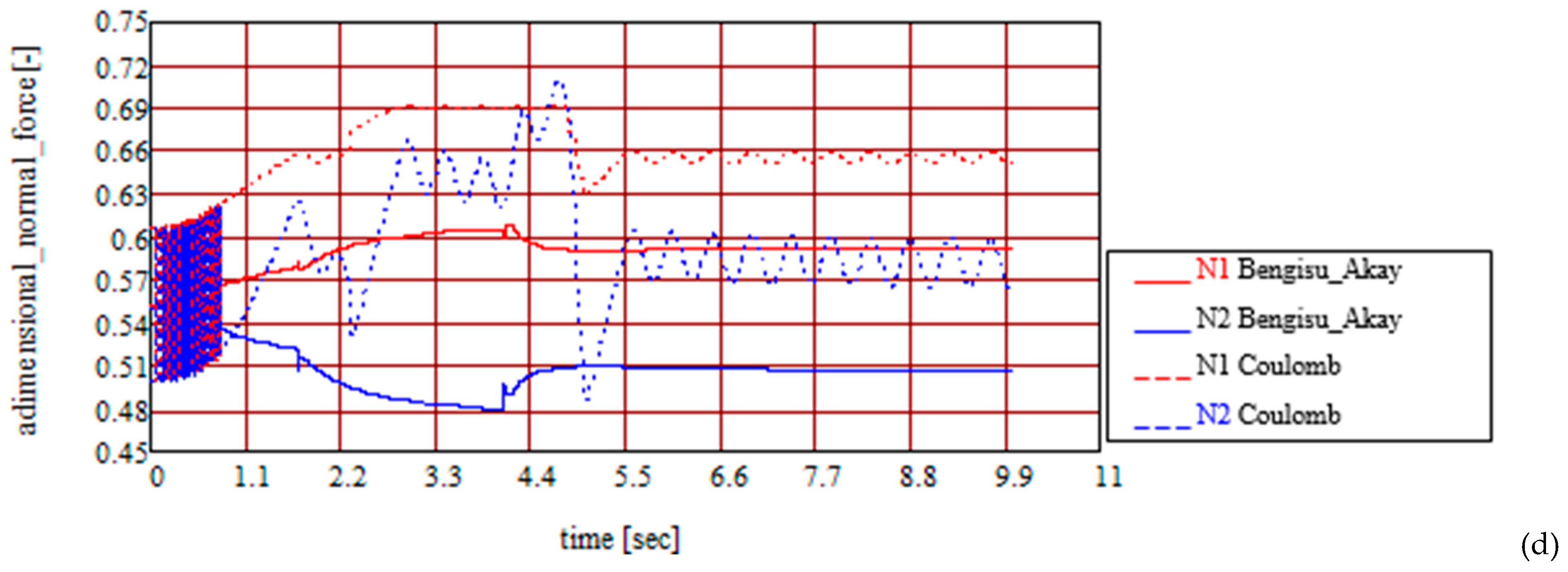
- An important subject is adopting the dry friction model for the ball–ring contact points: the Coulomb and Bengisu–Akay models were adopted because both these models consider the proportionality between the friction force and magnitude of the normal reaction, a fact that substantially simplifies the calculus for obtaining and integrating the equations of motion for the new model.
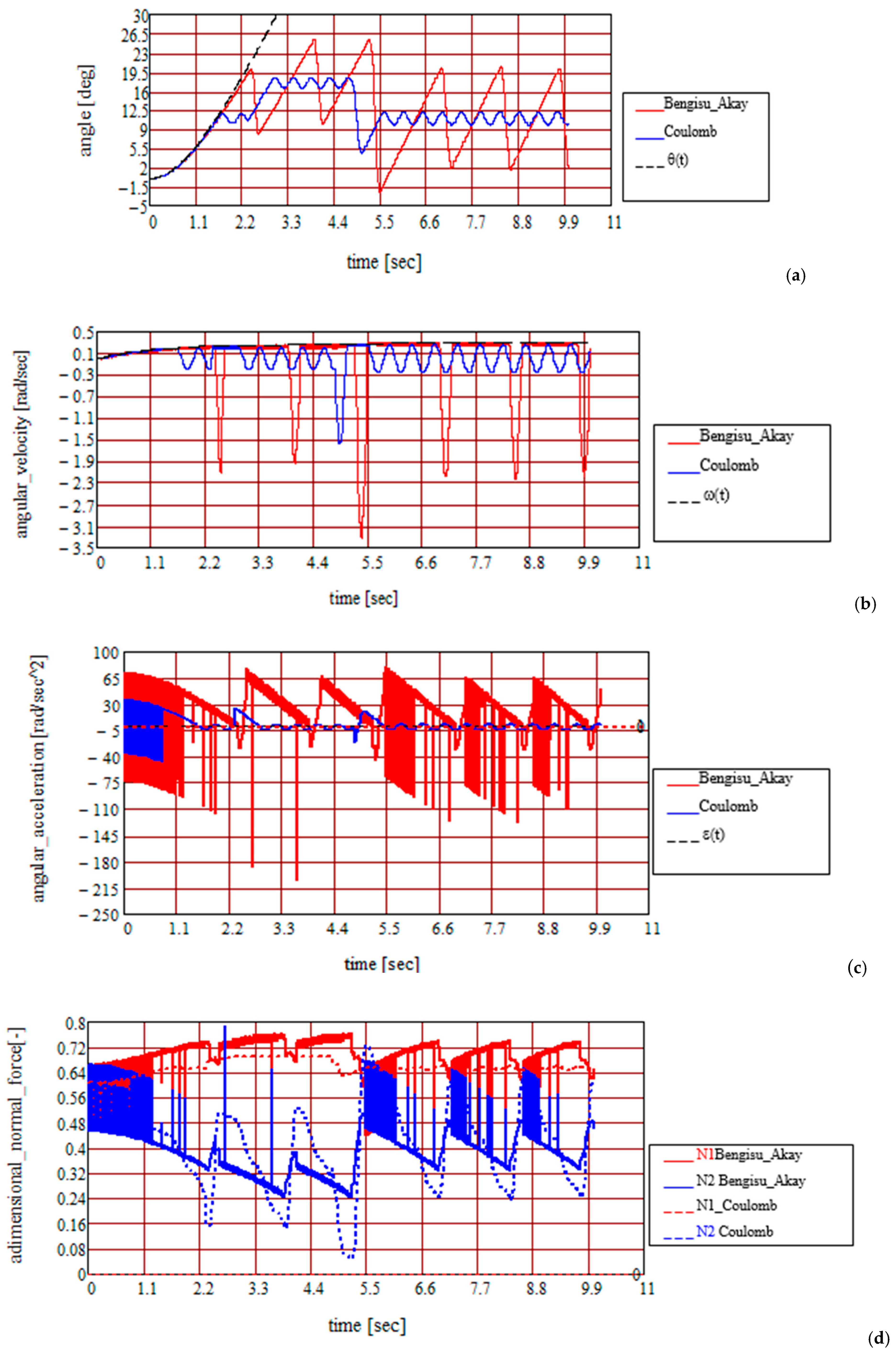
- The proposed dynamic model highlights the following phenomena, depending on the law of motion of the ring:
- Moving ring: oscillatory motion without separation (detachment); oscillatory motion with separation; circular motion without separation;
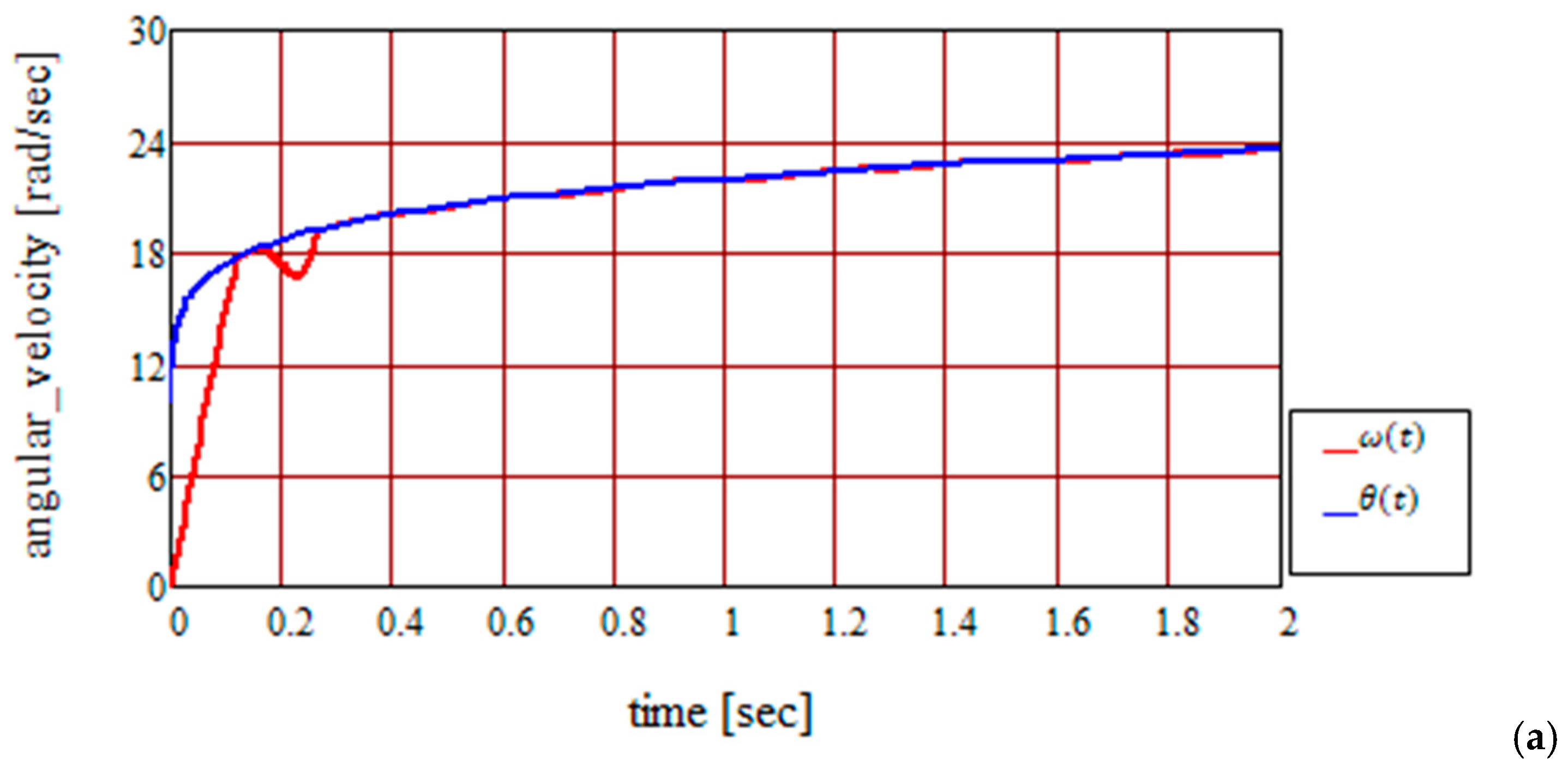
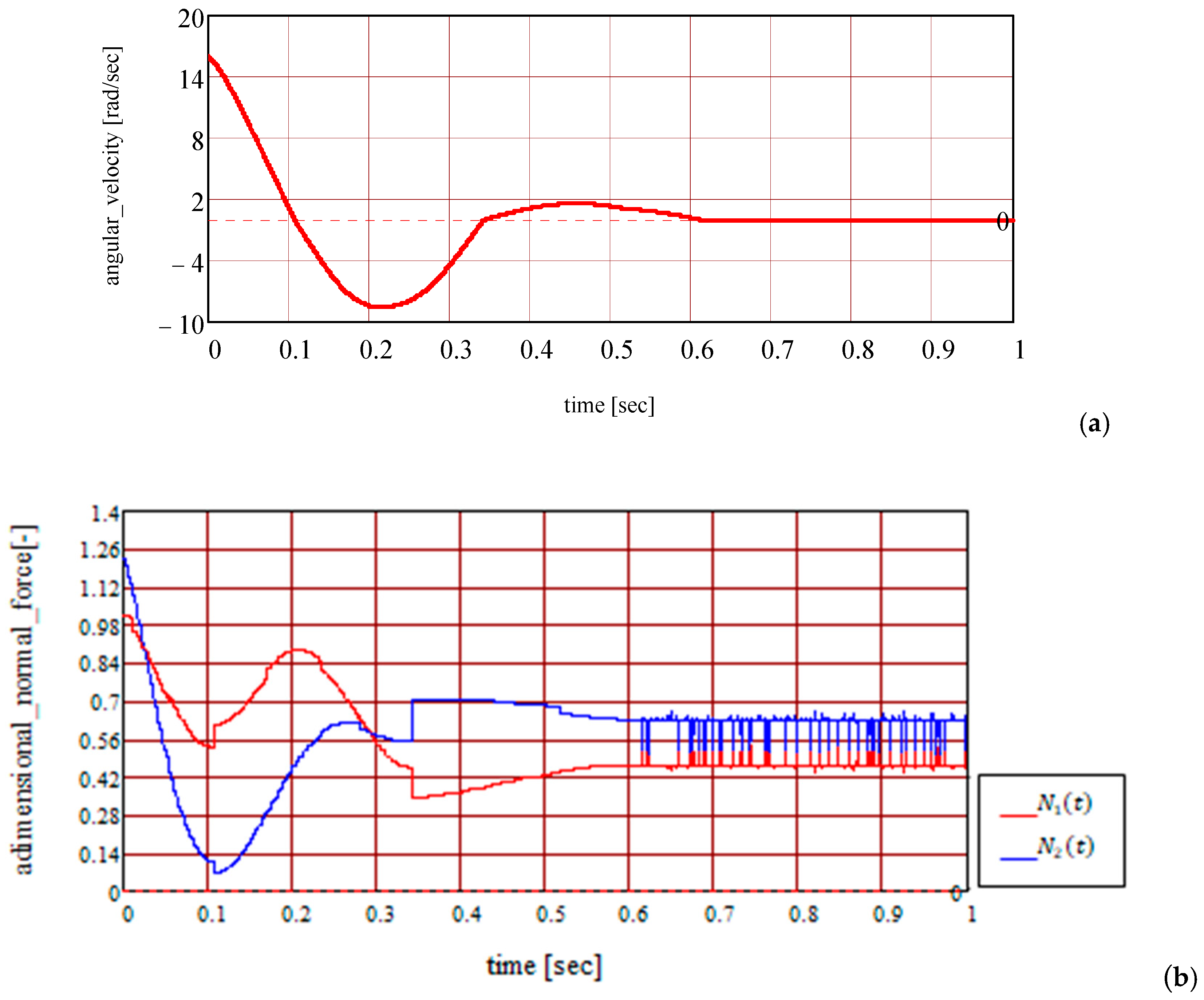
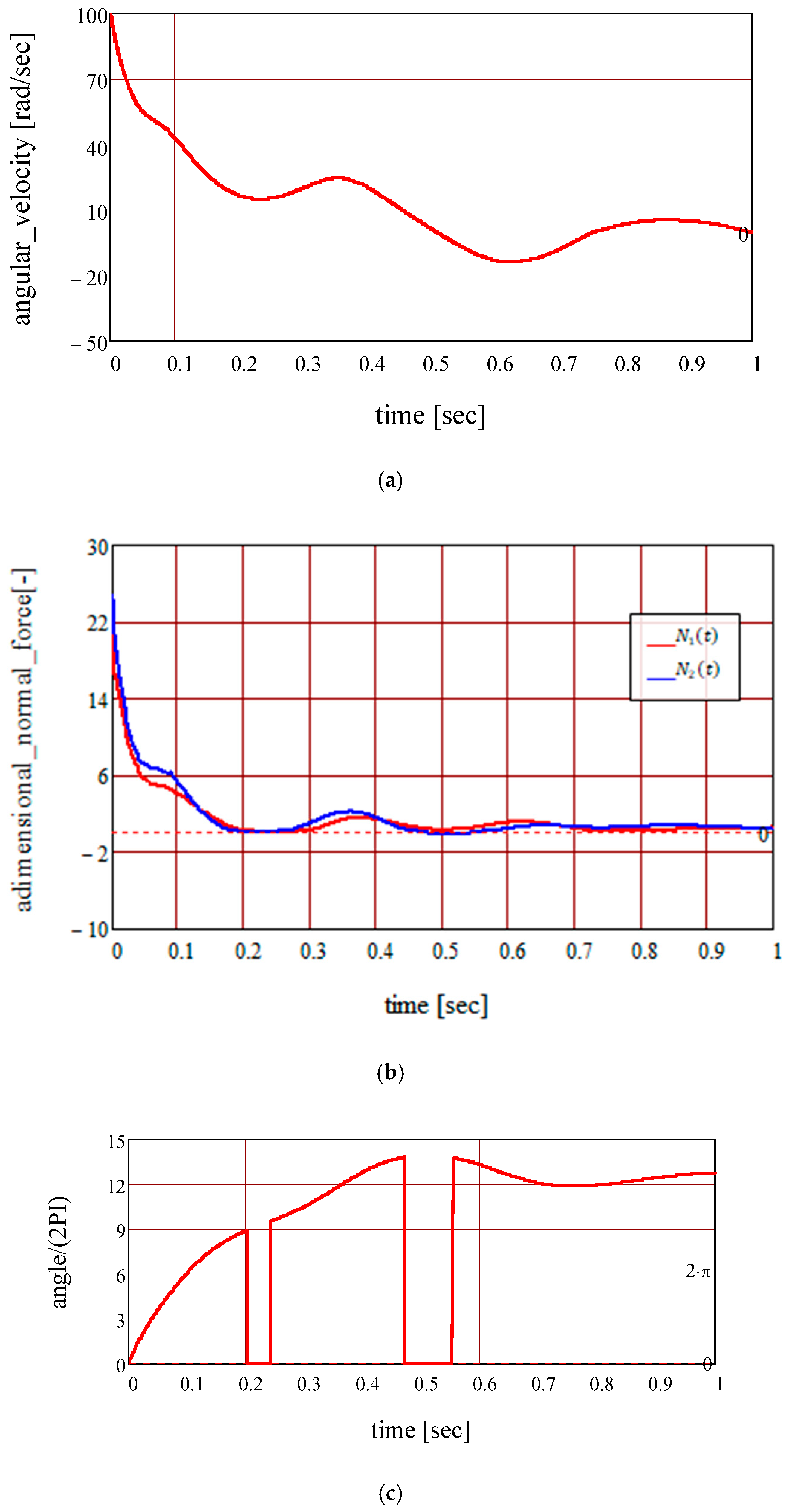
- Immobile ring and the body launched into motion: oscillatory damped motion; oscillatory motion with detachment; circular motion with separation;
- Future research aims at quantitative corroboration, besides the qualitative validation in the presented experimental findings, consisting in obtaining the laws of motion of the ring and of the body, using a device based on modern measurement techniques.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Description |
| Friction force | |
| Elastic force | |
| Friction force (Coulomb model) | |
| Normal force | |
| Maximum static friction with stiction | |
| Body weight; normal and tangential components | |
| Normal reaction | |
| Linear displacement | |
| Linear velocity | |
| Linear acceleration | |
| t | Time |
| Velocity of the belt | |
| Mass of the body | |
| Angular velocity | |
| Angular acceleration | |
| Elastic constant of the spring | |
| Relative velocity | |
| Velocity (Stribeck model) | |
| Kinetic friction coefficient | |
| Coefficient of static friction | |
| Coefficient of dynamic friction | |
| Velocity—limit of static domain | |
| Velocity—limit of transition domain | |
| Parameter representing the slope of the sliding state | |
| Deflection | |
| Material characteristic for Dahl friction model | |
| Contact damping (LuGre model) | |
| Viscous damping (LuGre model) | |
| Radius of sphere, radius of ring | |
| M | Mass of the dynamic model |
| 2a | Distance between the centres of the spheres |
| Axial moment of inertia | |
| The centre of mass | |
| Contact points | |
| Versors in the contact points | |
| Versors of the mobile frame | |
| Versor of the Ox axis of ground | |
| Acceleration of the centre of mass | |
| Distance between the origin and the centre of mass | |
| Position angle of the ring | |
| Position angle of the centre of mass | |
| Angle depending on geometry of the model (a, r, R) | |
| Parameter of Bengisu–Akay model | |
| Constants of proportionality | |
| Angular amplitude | |
| Initial angular velocity | |
| Maximum angular velocity | |
| Heaviside step function |
References
- Duca, C.; Buium, F.; Paraoaru, G. Mechanisms (Mecanisme, in Romanian); Gheorghe Asachi: Iasi, Romania, 2003; pp. 277–285. [Google Scholar]
- Broch, J.T. Mechanical Vibrations and Shock Measurements, 2nd ed.; Bruel and Kjaer: Naerum, Denmark, 1984; pp. 72–83. [Google Scholar]
- Marques, F.; Flores, P.; Claro, J.C.; Lankarani, H. A survey and comparison of several friction force models for dynamic analysis of multibody mechanical systems. Nonlinear Dyn. 2016, 86, 1407–1443. [Google Scholar] [CrossRef]
- Ronnie Hensen, A.H. Controlled Mechanical Systems with Friction. Ph.D. Thesis, Technische Universiteit Eindhoven, Eindhoven, The Netherlands, 21 February 2002. [Google Scholar]
- Pfeiffer, F.; Glocker, C. Multibody Dynamics with Unilateral Contacts; John Wiley & Sons: Hoboken, NJ, USA, 1996; pp. 51–69. [Google Scholar]
- Ardema, M.D. Newton-Euler Dynamics; Springer: New York, NY, USA, 2006; pp. 231–260. ISBN 978-0-387-23276-8. [Google Scholar]
- Khan, Z.; Chacko, V.; Nazir, H. A review of friction models in interacting joints for durability design. Friction 2017, 5, 1–22. [Google Scholar] [CrossRef]
- Pennestri, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and comparison of dry friction force models. Nonlinear Dyn. 2016, 83, 1785–1801. [Google Scholar] [CrossRef]
- Pennestrì, E.; Valentini, P.P.; Vita, L. Multibody dynamics simulation of planar linkages with Dahl friction. Multibody Syst. Dyn. 2007, 17, 321–347. [Google Scholar] [CrossRef]
- Amontons, G. De la resistance cause’e dans les machines. Mém. l’Academie R. A. 1699, 257–282. [Google Scholar]
- Coulomb, C.A. Théorie des Machines Simples, en Ayant Égard au Frottement de Leurs Parties, et à la Roideur des Cordages; Bachelier, Libraire: Paris, France, 1821; pp. 212–245. [Google Scholar]
- Taylor, R.I. Rough Surface Contact Modelling—A Review. Lubricants 2022, 10, 98. [Google Scholar] [CrossRef]
- Greenwood, J.A.; Williamson, J.B.P. Contact of Nominally Flat Surfaces. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1966, 295, 300–319. [Google Scholar]
- Greenwood, J.; Tripp, J. Contact of two nominally flat rough surfaces. Proc. IMechE J. Mech. Eng. Sci. 1970, 185, 625–633. [Google Scholar] [CrossRef]
- Leighton, M.; Morris, N.; Rahmani, R.; Rahnejat, H. Surface specific asperity model for prediction of friction in boundary and mixed regimes of lubrication. Meccanica 2017, 52, 21–33. [Google Scholar] [CrossRef]
- Centea, D.; Rahnejat, H.; Menday, M.T. The influence of the interface coefficient of friction upon the propensity to judder in automotive clutches. Proc. IMechE Part D J. Automob. Eng. 1999, 213, 245–258. [Google Scholar] [CrossRef]
- Abinowicz, E. The nature of the static and kinetic coefficients of friction. J. Appl. Phys. 1951, 22, 1373–1379. [Google Scholar] [CrossRef]
- Rabinowicz, E. Stick and slip. Sci. Am. 1956, 194, 109–118. [Google Scholar] [CrossRef]
- Berger, E.J.; Mackin, T.J. On the walking stick-slip problem. Tribol. Int. 2014, 75, 51–60. [Google Scholar] [CrossRef]
- Hess, D.P.; Soom, A. Friction at a lubricated line contact operating at oscillating sliding velocities. J. Tribol. 1990, 112, 147–152. [Google Scholar] [CrossRef]
- Bo, L.C.; Pavelescu, D. The friction-speed relation and its influence on the critical velocity of stick-slip motion. Wear 1982, 82, 277–289. [Google Scholar]
- Threlfall, D.C. The inclusion of Coulomb friction in mechanisms programs with particular reference to DRAM au programme DRAM. Mech. Mach. Theory 1973, 13, 475–483. [Google Scholar] [CrossRef]
- Andersson, S.; Söderberg, A.; Björklund, S. Friction models for sliding dry, boundary and mixed lubricated contacts. Tribol. Int. 2007, 40, 580–587. [Google Scholar] [CrossRef]
- Karnopp, D. Computer simulation of stick-slip friction in mechanical dynamic systems. J. Dyn. Syst. Meas. Control 1985, 107, 100–103. [Google Scholar] [CrossRef]
- Bengisu, M.T.; Akay, A. Stability of friction-induced vibrations in multi-degree-of-freedom systems. J. Sound Vibr. 1994, 171, 557–570. [Google Scholar] [CrossRef]
- Dahl, P.R. A Solid Friction Model-Technical Report; The Aerospace Corporation: El Segundo, CA, USA, 1968. [Google Scholar]
- Dahl, P.R. Solid friction damping in mechanical vibrations. AIAA J. 1976, 14, 1675–1682. [Google Scholar] [CrossRef]
- Haessig, D.A., Jr.; Friedland, B. On the modeling and simulation of friction. J. Dyn. Sys. Meas. Control 1991, 113, 354–362. [Google Scholar] [CrossRef]
- Olsson, H.; Åström, K.J.; Canudas de Wit, C.; Gäfvert, M.; Lischinsky, P. Friction models and friction compensation. Eur. J. Control 1998, 4, 176–195. [Google Scholar] [CrossRef]
- Armstrong-Hélouvry, B.; Dupont, P.; de Wit Canudas, C. A survey of models, analysis tools and compensation methods for the control of machines with friction. Automatica 1994, 30, 1083–1138. [Google Scholar] [CrossRef]
- Canudas de Wit, C.; Olsson, H.; Åström, K.J.; Lischinsky, P. A new model for control of systems with friction. IEEE Trans. Autom. Control 1995, 40, 419–425. [Google Scholar] [CrossRef]
- Lenoir, Y. Identification des modèles tribologique par pendule. C. R. Acad. Sci. Ser. IIb Mec. Phys. Astron. 1999, 327, 1259–1264. [Google Scholar] [CrossRef]
- Kermani, M.R.; Pate, R.V. Friction Identification in Robotic Manipulators, Case Studies. In Proceedings of the IEEE Conference on Control Applications, Toronto, ON, Canada, 28–31 August 2005. [Google Scholar]
- Arnoux, J.J.; Sutter, G.; List, G.; Molinari, A. Friction experiments for dynamical coefficient measurement. Adv. Tribol. 2011, 1, 1–6. [Google Scholar] [CrossRef]
- Dupont, P.; Armstrong, B.; Hayward, V. Elasto-plastic friction model: Contact compliance and stiction. In Proceedings of the American Control Conference, Chicago, IL, USA, 28–30 June 2000. [Google Scholar]
- Dupont, P.; Hayward, V.; Armstrong, B.; Altpeter, F. Single state elasto-plastic friction models. IEEE Trans. Autom. Control 2002, 47, 787–792. [Google Scholar] [CrossRef]
- Atkinson, K.; Han, W.; Stewart, D. Numerical Solution of Ordinary Differential Equations; John Wiley & Sons: Hoboken, NJ, USA, 2009; pp. 67–94. [Google Scholar]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations, 2nd ed.; John Wiley & Sons: Chichester, UK, 2008; pp. 93–104. [Google Scholar]
- Ciornei, F.C.; Diaconescu, E. Dynamic contact between a rigid indenter and a Kelvin-Voigt half-space. In Proceedings of the World Tribology Congress III, Washington, DC, USA, 12–16 September 2005. [Google Scholar]
- Ciornei, F.C.; Alaci, S.; Bujoreanu, C. A model of the effect of dry friction on the behaviour of a dynamical system. IOP Conf. Ser. Mater. Sci. Eng. 2020, 997, 012006. [Google Scholar] [CrossRef]
- Maxfield, B. Engineering with Mathcad; Elsevier Linacre House: Oxford, UK, 2006; pp. 317–335. [Google Scholar]
- Moore, H. MATLAB for Engineers, 6th ed.; Pearson Education Inc.: Hoboken, NJ, USA, 2022; pp. 59–102. [Google Scholar]
- Zamani, N.; Weaver, G.M. CATIA V5 Tutorials Mechanism Design & Animation, 1st ed.; SDC Publications: Mission, KS, USA, 2012. [Google Scholar]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alaci, S.; Lupascu, C.; Romanu, I.-C.; Cerlinca, D.-A.; Ciornei, F.-C. Some Aspects of the Effects of Dry Friction Discontinuities on the Behaviour of Dynamic Systems. Computation 2024, 12, 181. https://doi.org/10.3390/computation12090181
Alaci S, Lupascu C, Romanu I-C, Cerlinca D-A, Ciornei F-C. Some Aspects of the Effects of Dry Friction Discontinuities on the Behaviour of Dynamic Systems. Computation. 2024; 12(9):181. https://doi.org/10.3390/computation12090181
Chicago/Turabian StyleAlaci, Stelian, Costica Lupascu, Ionut-Cristian Romanu, Delia-Aurora Cerlinca, and Florina-Carmen Ciornei. 2024. "Some Aspects of the Effects of Dry Friction Discontinuities on the Behaviour of Dynamic Systems" Computation 12, no. 9: 181. https://doi.org/10.3390/computation12090181