
Dual-Mode Flexible Sensor Based on PVDF/MXene Nanosheet/Reduced Graphene Oxide Composites for Electronic Skin

Abstract
:1. Introduction
2. Materials and Method
2.1. Materials
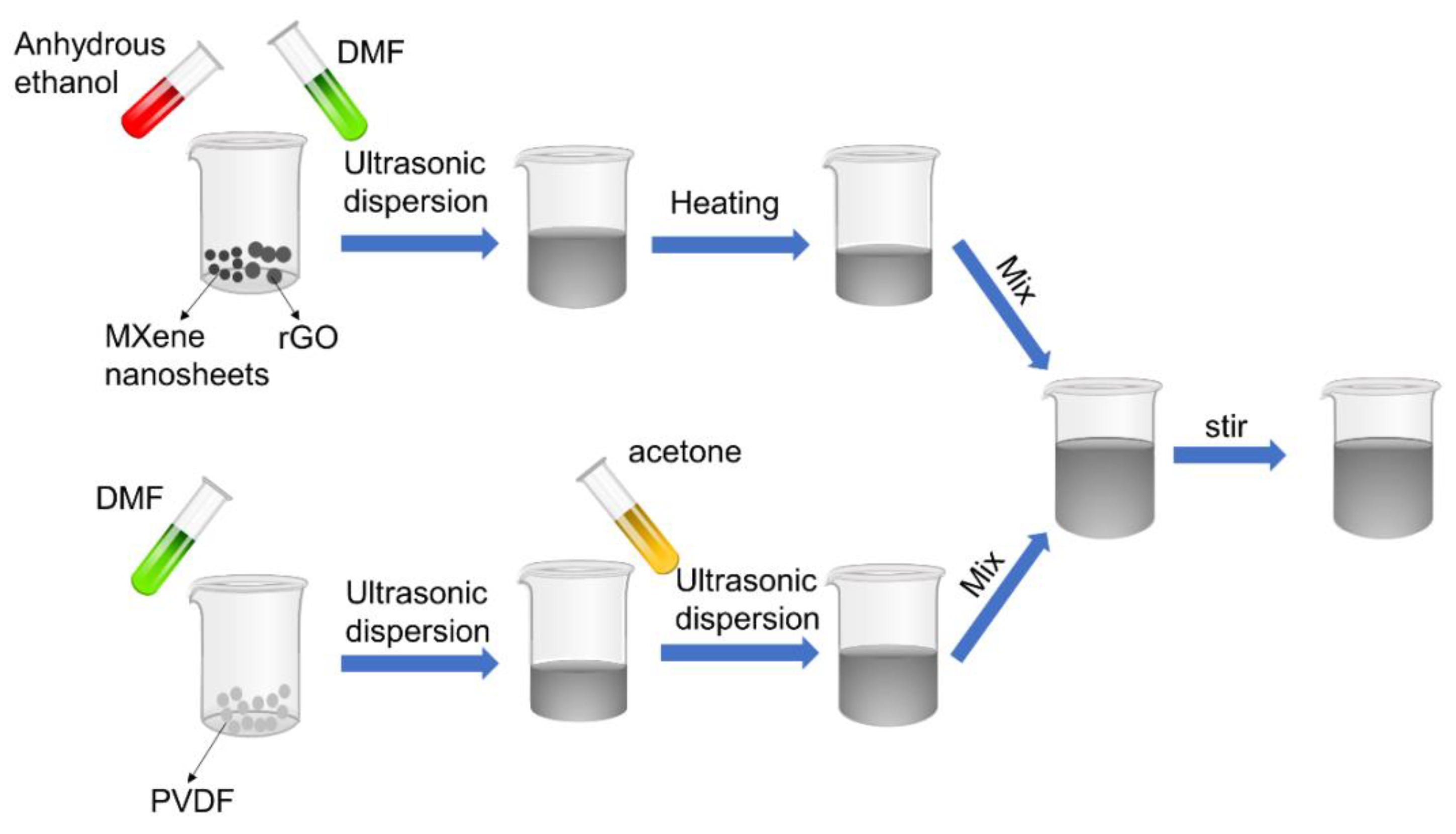
2.2. Preparation of PMR Mixed Printing Solution
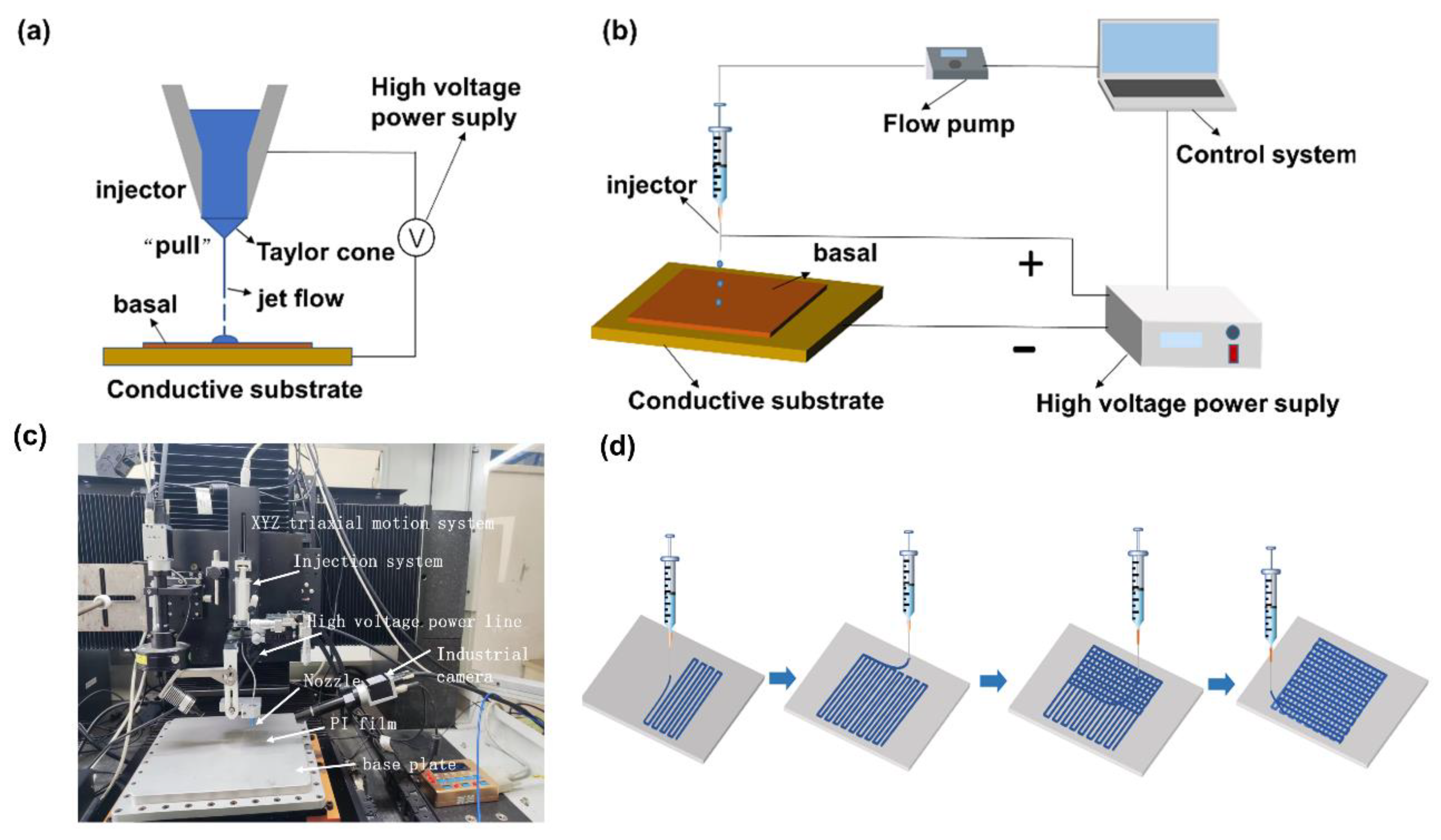
2.3. Preparation of PMR Nanocomposite Thin Films
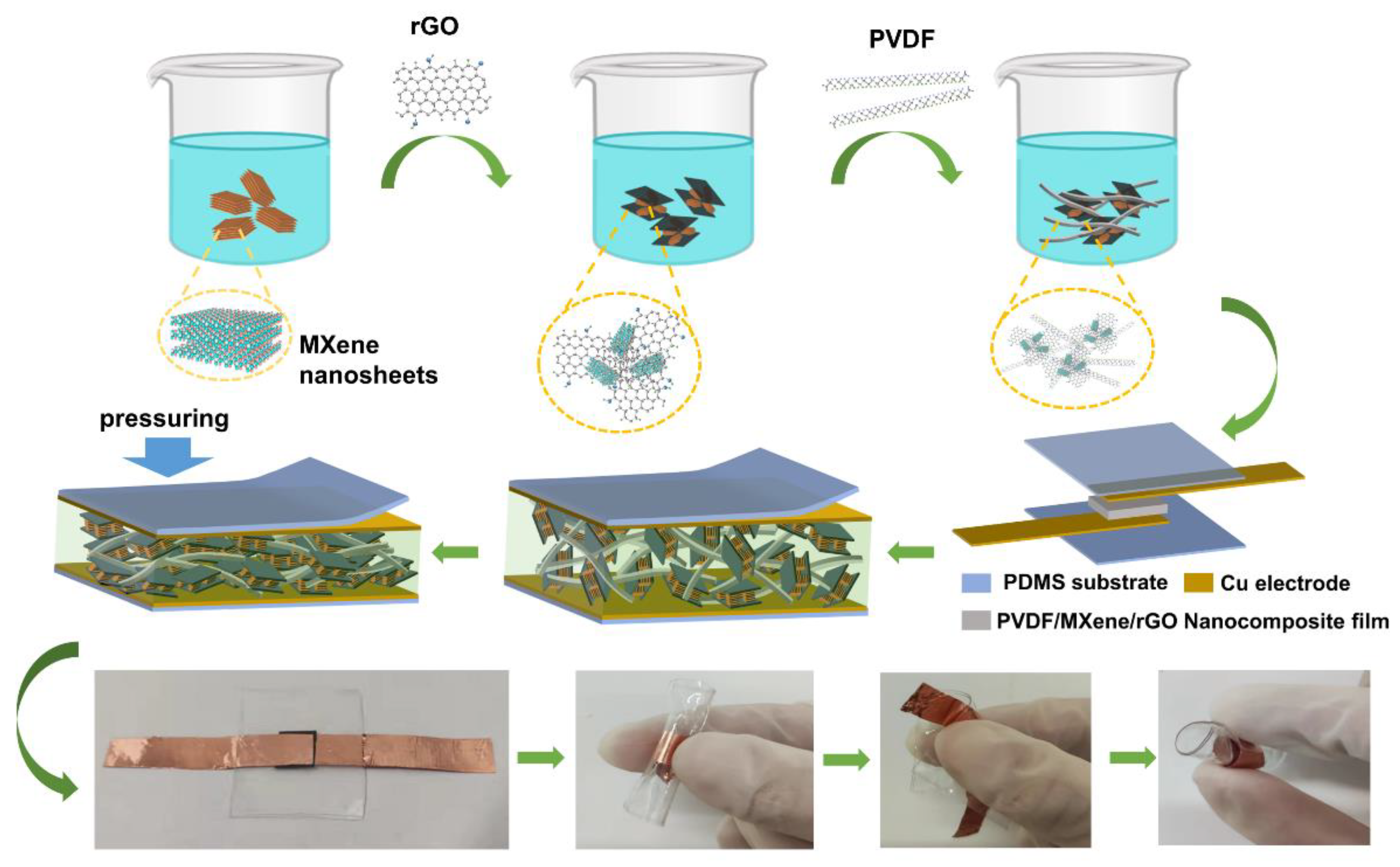
2.4. Fabrication of PMR Dual-Mode Flexible Sensor
2.5. Characterization and Measurement
3. Results and Discussions
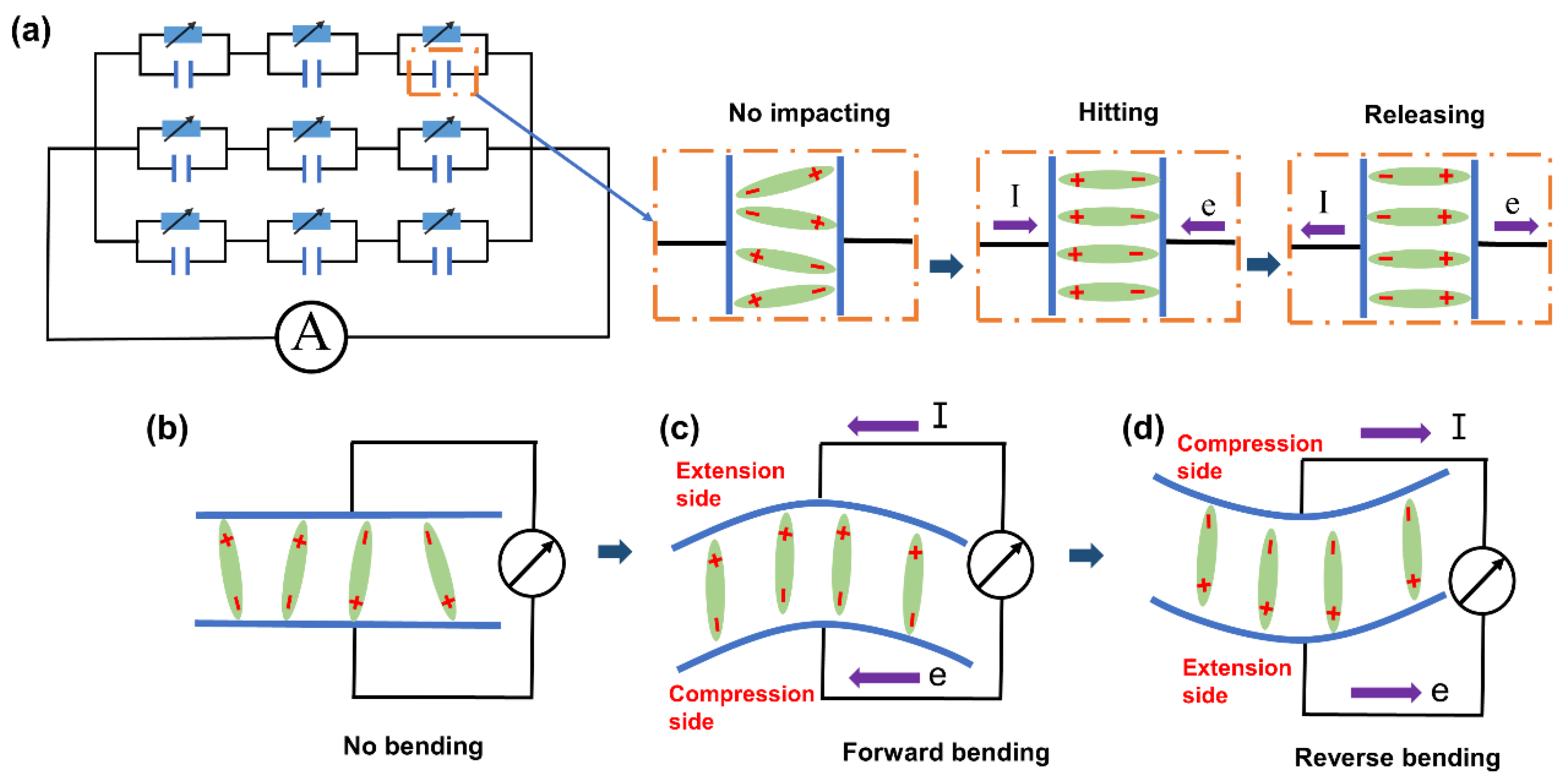
3.1. Sensing Mechanism of the PMR Dual-Mode Flexible Sensor
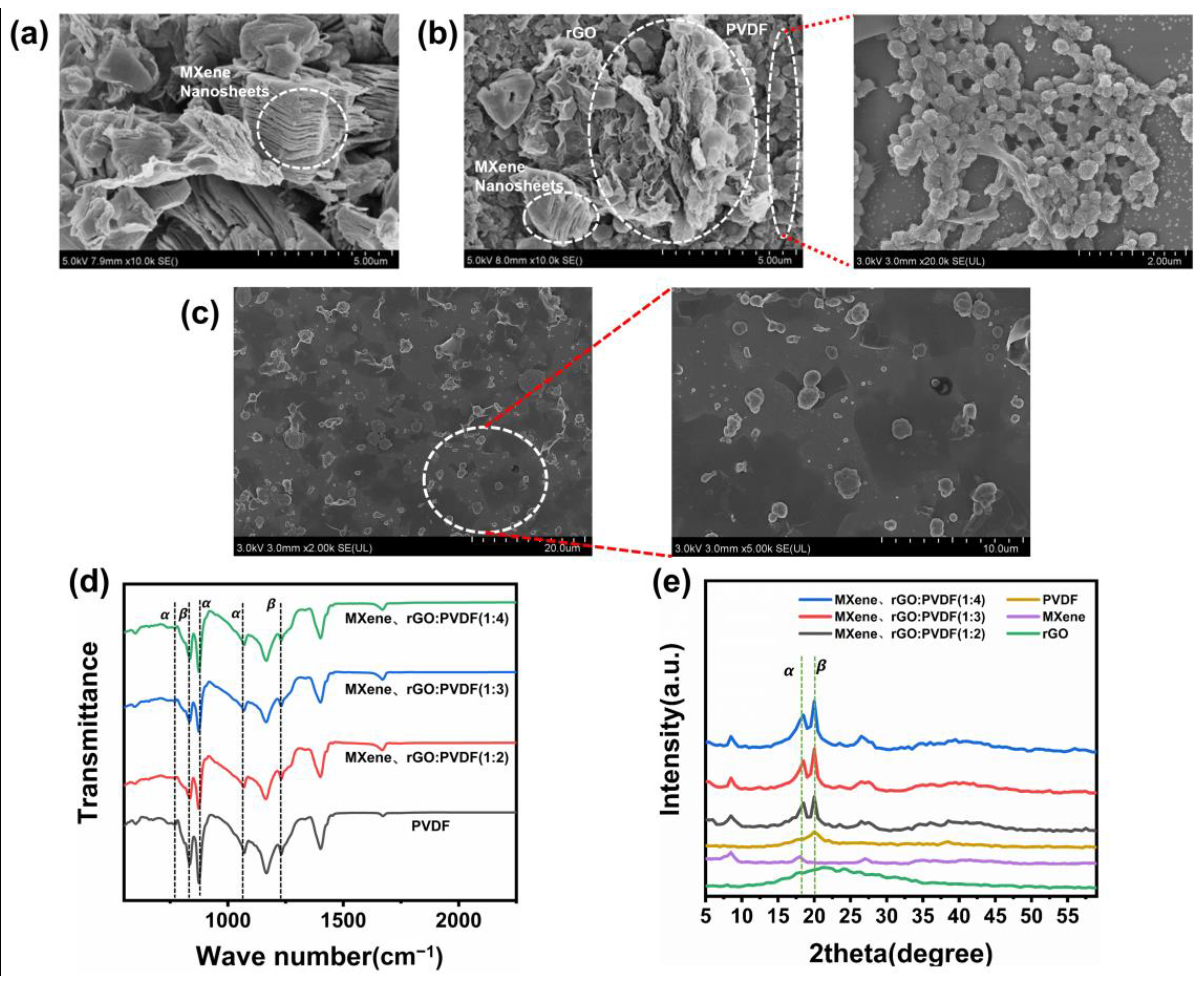
3.2. Characterization of the PMR Dual-Mode Flexible Sensor
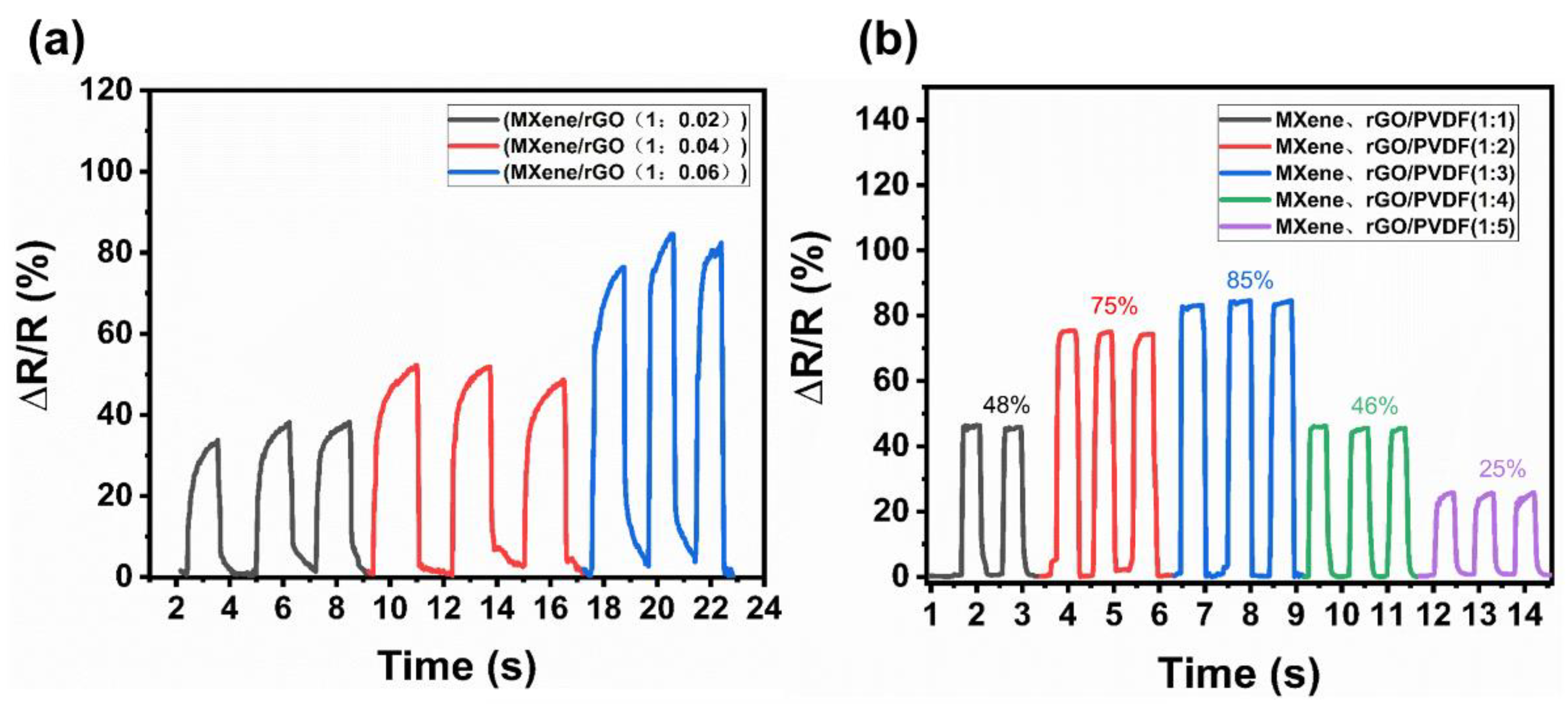
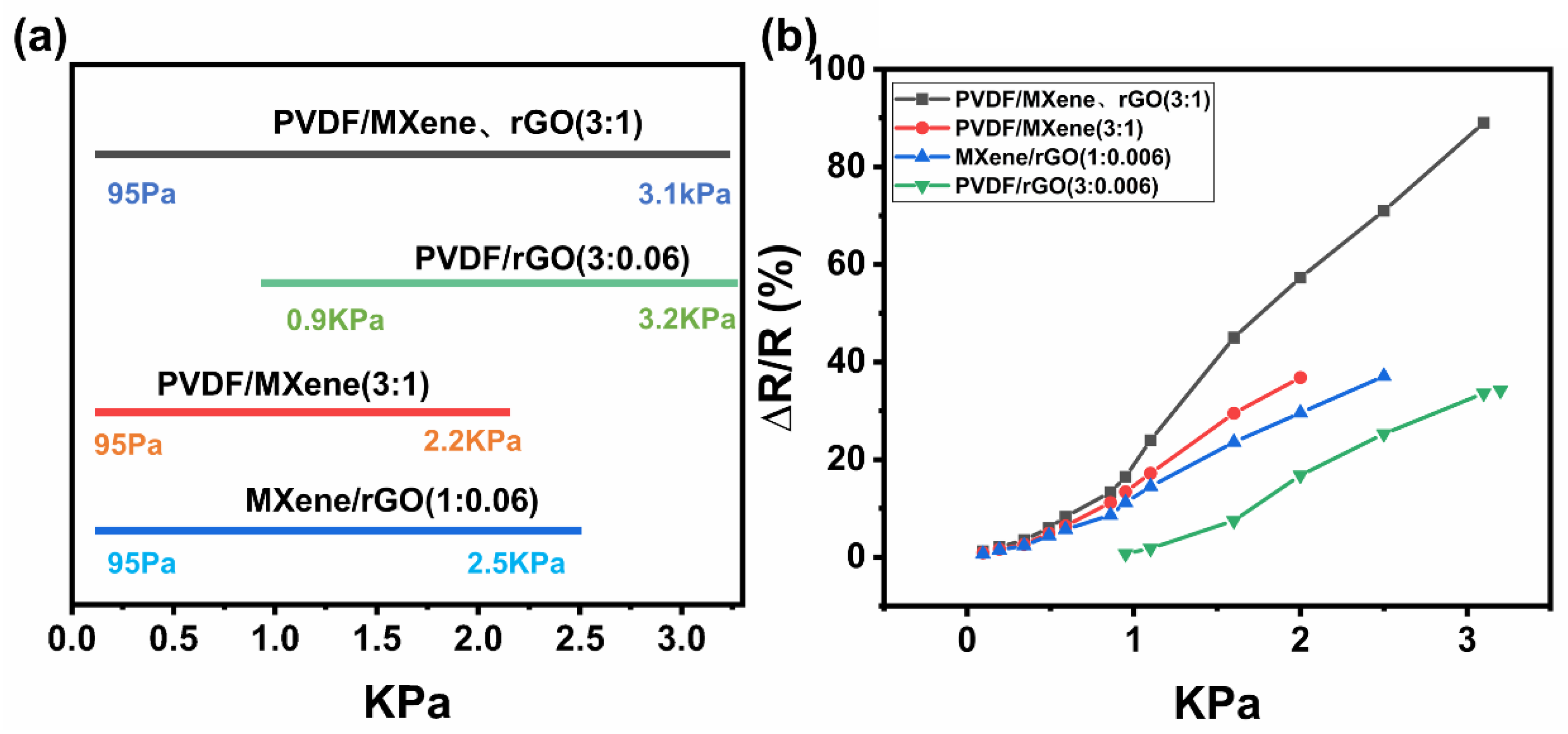
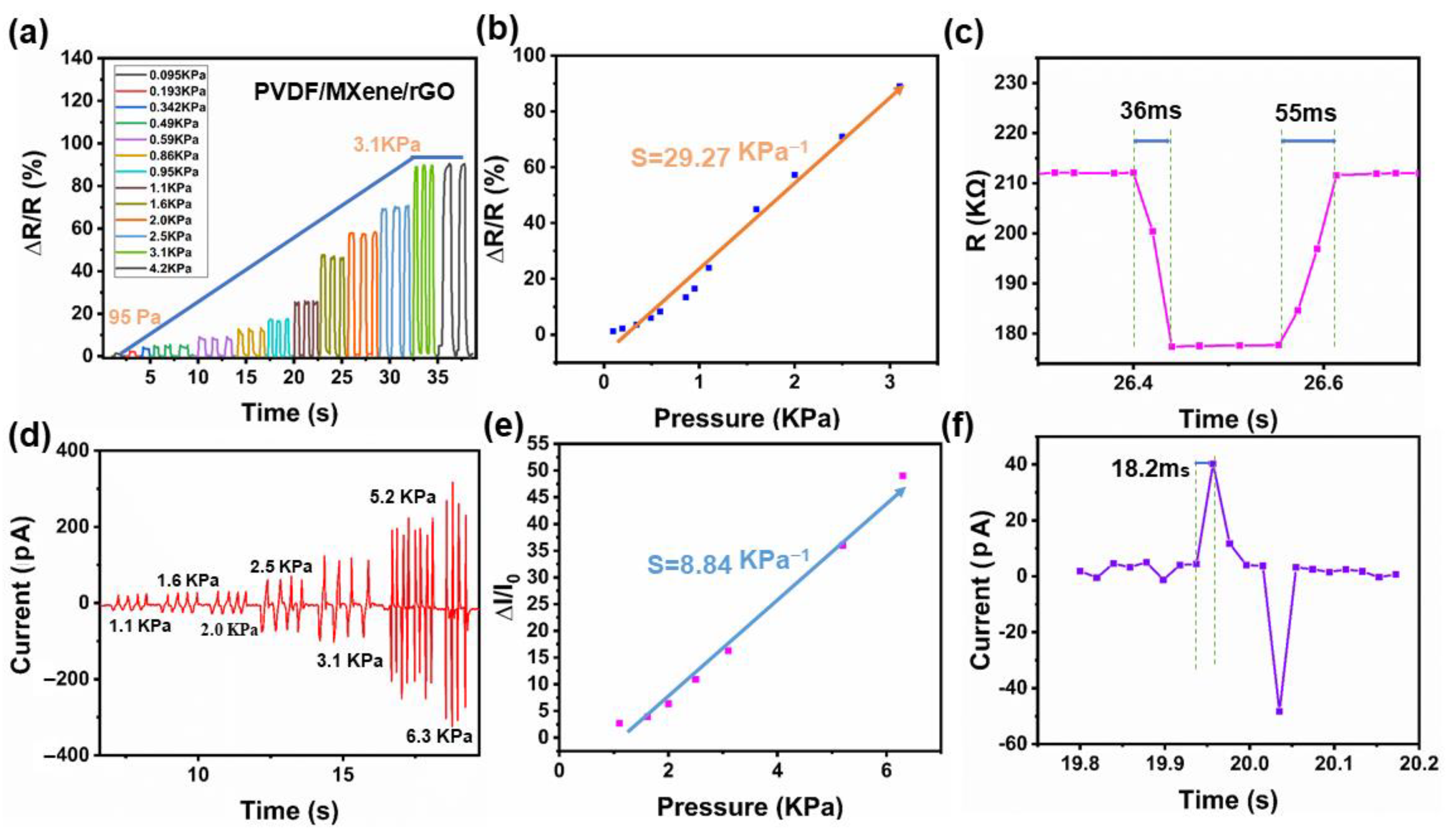
3.3. Sensing Properties of the PMR Dual-Mode Flexible Sensor
3.4. Practical Applications of PMR Dual-Mode Flexible Sensor
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Benight, S.J.; Wang, C.; Tok, J.B.H.; Bao, Z.A. Stretchable and self-healing polymers and devices for electronic skin. Prog. Polym. Sci. 2013, 38, 1961–1977. [Google Scholar] [CrossRef]
- Chortos, A.; Bao, Z.N. Skin-inspired electronic devices. Mater. Today 2014, 17, 321–331. [Google Scholar] [CrossRef]
- Li, H.B.; Li, F.Y.; Han, C.P.; Cui, Z.M.; Xie, G.Y.; Zhang, A.Q. Highly sensitive and selective tryptophan colorimetric sensor based on 4, 4-bipyridine-functionalized silver nanoparticles. Sensor Actuat. B-Chem. 2010, 145, 194–199. [Google Scholar] [CrossRef]
- Pan, L.J.; Chortos, A.; Yu, G.H.; Wang, Y.Q.; Isaacson, S.; Allen, R.; Shi, Y.; Dauskardt, R.; Bao, Z.N. An ultra-sensitive resistive pressure sensor based on hollow-sphere microstructure induced elasticity in conducting polymer film. Nat. Commun. 2014, 5, 3002. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, Y.J.; Wei, X.; Gao, S.; Yue, W.J.; Li, Y.; Shen, G.Z. Recent advances in carbon material-based multifunctional sensors and their applications in electronic skin systems. Adv. Funct. Mater. 2012, 31, 2104288. [Google Scholar] [CrossRef]
- Canavese, G.; Stassi, S.; Fallauto, C.; Corbellini, S.; Cauda, V.; Camarchia, V.; Pirola, M.; Pirri, C.F. Piezoresistive flexible composite for robotic tactile applications. Sensor Actuat. A-Phys. 2014, 208, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Lai, Y.C.; Ye, B.W.; Lu, C.F.; Chen, C.T.; Jao, M.H.; Su, W.F.; Hung, W.Y.; Lin, T.Y.; Chen, Y.F. Extraordinarily sensitive and low-voltage operational cloth-based electronic skin for wearable sensing and multifunctional integration uses: A tactile-induced insulating-to-conducting transition. Adv. Funct. Mate. 2016, 26, 1286–1295. [Google Scholar] [CrossRef]
- Lou, Z.; Chen, S.; Wang, L.L.; Jiang, K.; Shen, G.L. An ultra-sensitive and rapid response speed graphene pressure sensors for electronic skin and health monitoring. Nano Energy 2016, 23, 7–14. [Google Scholar] [CrossRef]
- Wang, X.; Cu, Y.; Xiong, Z.P.; Cui, Z.; Zhang, T. Silk-molded flexible, ultrasensitive, and highly stable electronic skin for monitoring human physiological signals. Adv. Mater. 2014, 26, 1336–1342. [Google Scholar] [CrossRef]
- Cai, Y.C.; Shen, J.; Ge, G.; Zhang, Y.Z.; Jin, W.Q.; Huang, W.; Shao, J.J.; Yang, J.; Dong, X.C. Stretchable Ti3C2Tx MXene/carbon nanotube composite based strain sensor with ultrahigh sensitivity and tunable sensing range. ACS Nano 2018, 12, 56–62. [Google Scholar] [CrossRef]
- Wu, Y.H.; Liu, H.Z.; Chen, S.; Dong, X.C.; Wang, P.P.; Liu, S.Q.; Lin, Y.; Wei, Y.; Liu, L. Channel crack-designed gold@PU sponge for highly elastic piezoresistive sensor with excellent detectability. ACS Appl. Mater. Inter. 2017, 9, 2098–20105. [Google Scholar] [CrossRef] [PubMed]
- Aryafar, M.; Hamedi, M.; Ganjeh, M.M. A novel temperature compensated piezoresistive pressure sensor. Measurement 2015, 63, 25–29. [Google Scholar] [CrossRef]
- Park, S.; Kim, H.; Vosgueritchian, M.; Cheon, S.; Kim, H.; Koo, J.H.; Kim, T.R.; Lee, S.; Schwartz, G.; Chang, H. Stretchable energy-harvesting tactile electronic skin capable of differentiating multiple mechanical stimuli modes. Adv. Mater. 2014, 26, 7324–7332. [Google Scholar] [CrossRef] [PubMed]
- Su, J.Y.; Keplinger, C.; Whitesides, G.M.; Suo, Z.G. Ionic skin. Adv. Mater. 2014, 26, 7608–7614. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, skin-mountable, and wearable strain sensors and their potential applications: A review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Shin, K.; Choi, E.; Sim, M.; Kang, M.; Choi, J.W.; Cha, S.; Kwon, H.J.; Kang, H.; Jang, J.E. Fundamental insights into the electrical signals of a piezoelectric sensor in a sliding condition. Nano Energy 2022, 100, 107487. [Google Scholar] [CrossRef]
- Rajala, S.; Siponkoski, T.; Sarlin, E.; Mettanen, M.; Vuoriluoto, M.; Pammo, A.; Juuti, J.; Rojas, O.J.; Franssila, S.; Tuukkanen, S. Cellulose nanofibril film as a piezoelectric sensor material. ACS Appl. Mater. Inter. 2016, 8, 15607–15614. [Google Scholar] [CrossRef] [Green Version]
- De Kerpel, K.; De Schampheleire, S.; De Keulenaer, T.; De Paepe, M. Effect of the bend geometry on the two-phase frictional pressure drop and flow behaviour in the vicinity of the bend. Appl. Therm. Eng. 2016, 104, 403–413. [Google Scholar] [CrossRef]
- Roy, K.; Ghosh, S.K.; Sultana, A.; Garain, S.; Xie, M.; Bowen, C.R.; Henkel, K.; Schmeiβer, D.; Mandal, D. A Self-powered wearable pressure sensor and pyroelectric breathing sensor based on GO interfaced PVDF nanofibers. ACS Appl. Nano Mater. 2019, 2, 2013–2025. [Google Scholar] [CrossRef]
- Yang, Y.; Pan, H.; Xie, G.Z.; Jiang, Y.D.; Chen, C.X.; Su, Y.J.; Wang, Y.; Tai, H.L. Flexible piezoelectric pressure sensor based on polydopamine-modified BaTiO3/PVDF composite film for human motion monitoring. Sensor Actuat. A-Phys. 2019, 301, 11789. [Google Scholar] [CrossRef]
- Luo, J.Q.; Zhang, L.B.; Wu, T.; Song, H.J.; Tang, C.L. Flexible piezoelectric pressure sensor with high sensitivity for electronic skin using near-field electrohydrodynamic direct-writing method. Extreme Mech. Lett. 2020, 48, 101279. [Google Scholar] [CrossRef]
- Park, J.; Kim, M.; Lee, Y.; Lee, H.S.; Ko, H. Fingertip skin–inspired microstructured ferroelectric skins discriminate static/dynamic pressure and temperature stimuli. Sci. Adv. 2015, 1, 1500661. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tian, H.; Shu, Y.; Wang, X.F.; Mohammad, M.A.; Bie, Z.; Xie, Q.Y.; Li, C.; Mi, W.T.; Yang, Y.; Ren, T.L. A Graphene-based resistive pressure sensor with record-high sensitivity in a wide pressure range. Sci. Rep. 2015, 5, 8603. [Google Scholar] [CrossRef] [Green Version]
- Qin, R.Z.; Hu, M.J.; Li, X.; Yan, L.; Wu, X.G.; Liu, J.Z.; Gao, H.B.; Shan, G.G.; Huang, W. A highly sensitive piezoresistive sensor based on MXene and polyvinyl butyral with a wide detection limit and low power consumption. Nanoscale. Sep. 2020, 14, 32555857. [Google Scholar] [CrossRef] [PubMed]
- Yang, N.; Liu, H.L.; Yin, X.Y.; Wang, F.; Yan, X.; Zhang, X.N.; Cheng, T.L. Flexible Pressure Sensor Decorated with MXene and Reduced Graphene Oxide Composites for Motion Detection, Information Transmission, and Pressure Sensing Performance. ACS Appl. Mater. Interfaces 2022, 12, 36178119. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.N.; Yue, Y.; Zhang, H.; Cheng, F.; Zhao, W.Q.; Rao, J.Y.; Luo, S.J.; Wang, J.; Jiang, X.L.; Liu, Z.; et al. 3D synergistical MXene/reduced graphene oxide aerogel for a piezoresistive sensor. ACS Nano 2018, 12, 3209–3216. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Guo, Z.Y.; Zhong, M.J.; Wan, P.B.; Zhang, W.X.; Zhang, L.Q. A flexible wearable pressure sensor with bioinspired microcrack and interlocking for full-range human-machine interfacing. Small 2018, 14, 1803018. [Google Scholar] [CrossRef] [PubMed]
- Qiu, Y.; Tian, Y.; Sun, S.S.; Hu, J.H.; Wang, Y.Y.; Zhang, Z.; Liu, A.P.; Cheng, H.Y.; Gao, W.Z.; Zhang, W.N.; et al. Bioinspired, multifunctional dual-mode pressure sensors as electronic skin for decoding complex loading processes and human motions. Nano Energy 2020, 78, 105337. [Google Scholar] [CrossRef]
- Shi, H.Y.; Allnubaiai, M.; Holbrook, C.M.; Miao, J.S.; Pinto, T.; Wang, C.; Tan, X.B. Screen-printed soft capacitive sensors for spatial mapping of both positive and negative pressures. Adv. Funct. Mater. 2019, 29, 1809116. [Google Scholar] [CrossRef]
- Zhao, J.; Gui, J.H.; Luo, J.; Gao, J.S.; Zheng, C.D.; Xu, R.Q. Highly responsive screen-printed asymmetric pressure sensor based on laser-induced grapheme. J. Micromech. Microeng. 2022, 32, 015002. [Google Scholar] [CrossRef]
- Chamankar, N.; Khajavi, R.; Yousefi, A.A.; Rashidi, A.; Golestanifar, F. A flexible piezoelectric pressure sensor based on PVDF nanocomposite fibers doped with PZT particles for energy harvesting applications. Ceram. Int. 2020, 46, 19669–19681. [Google Scholar] [CrossRef]
- Wang, T.; Xu, J.H.; Zhang, Z.M.; Bian, H.Q.; Sun, T.Y. g-C3N4 composited TiO2 nanofibers were prepared by high voltage electrostatic spinning to improve photocatalytic efficiency. J. Mater. Sci.-Mater. El. 2020, 31, 1178–1186. [Google Scholar] [CrossRef]
- Martinez, V.; Stauffer, F.; Adagunodo, M.O.; Forro, C.; Larmagnac, A. Stretchable silver nanowire-elastomer composite microelectrodes with tailored electrical properties. ACS Appl. Mater. Inter. 2015, 7, 13467–13475. [Google Scholar] [CrossRef] [PubMed]
- Kandala, B.S.P.K.; Zhang, G.Q.; Lcorriveau, C.; Paquin, M.; Chagnon, M.; Begun, D.; Shanov, V. Preliminary study on modelling, fabrication by photo-chemical etching and in vivo testing of biodegradable magnesium AZ31 stents. Bioact. Mater. 2021, 6, 1663–1675. [Google Scholar] [CrossRef] [PubMed]
- He, S.; Xin, B.J.; Chen, Z.M.; Liu, Y. Flexible and highly conductive Ag/G-coated cotton fabric based on graphene dipping and silver magnetron sputtering. Cellulose 2018, 25, 3691–3701. [Google Scholar] [CrossRef]
- Gao, Q.; Cao, C.; Ao, J.P.; Bi, J.L.; Yao, L.Y.; Guo, J.J.; Sun, G.Z.; Liu, W.; Zhang, Y.; Liu, F.F.; et al. Efficiency improvement of electrodeposition-processed Cu(In,Ga)Se2 solar cell with widen surface bandgap by spin-coating In2S3 thin film. Appl. Surf. Sci. 2021, 578, 152063. [Google Scholar] [CrossRef]
- Han, Y.; Dong, J.G. Electrohydrodynamic (EHD) Printing of molten metal ink for flexible and stretchable conductor with self-healing capability. Adv. Mater. Technol. 2018, 3, 1700268. [Google Scholar] [CrossRef]
- Li, H.B.; Zhang, H.M.; Chang, A.M.; Ma, X.H.; Rong, J.H.; Yang, L.Y. A novel core-shell structure NTC ceramic with high stability fabricating by an in-situ ink-jet printing method. J. Eur. Ceram. Soc. 2012, 41, 4167–4174. [Google Scholar] [CrossRef]
- Gong, H.; Wang, Z.L.; Cheng, Z.Q.; Chen, L.; Pan, H.H.; Zhang, D.M.; Hu, T.L.; Tyasi, T.L. Flexible Strain Sensor Based on 3D Electrospun Carbonized Sponge. CMC-Comput. Mater. Con. 2022, 73, 4971–4980. [Google Scholar] [CrossRef]
- Yin, N.; Gao, Y.Y.; Lo Verso, A.; Zhu, J.; Erdely, D.; Xue, C.L.; Lavelle, R.; Cheng, H.Y. Fabricating functional circuits on 3D freeform surfaces via intense pulsed light-induced zinc mass transfer. Mater Today 2021, 50, 24–34. [Google Scholar] [CrossRef]
- Tang, H.D.; Jia, S.Q.; Ding, S.A.; Liu, P.; Ma, J.R.; Xiao, X.T.; Qu, X.W.; Liu, H.C.; Yang, H.C.; Xu, B.; et al. Improved ink-jet-printed CdSe quantum dot light-emitting diodes with minimized hole transport layer erosion. ACS Appl. Electron. Mater. 2021, 7, 3005–3014. [Google Scholar] [CrossRef]
- Luo, J.Q.; Zhang, L.B.; Wu, T.; Song, H.J.; Tang, C.L.; Huang, F.L.; Zuo, C.C. Flexible electronic skin with high performance pressure sensing based on PVDF/rGO/BaTiO3 composite thin film. Org. Electron. 2021, 98, 106296. [Google Scholar] [CrossRef]
- Chen, J.Z.; Wu, T.; Zhang, L.B.; Feng, X.W.; Mao, Z.P. Fabrication of flexible organic electronic microcircuit pattern using near-field electrohydrodynamic direct-writing method. J. Mater. Sci.-Mater. El. 2019, 30, 17863–17871. [Google Scholar] [CrossRef]
- Dong, H.F.; Zhang, L.B.; Wu, T.; Song, H.J.; Luo, J.Q.; Huang, F.L.; Zuo, C.C. Flexible pressure sensor with high sensitivity and fast response for electronic skin using near-field electrohydrodynamic direct writing. Org. Electron. 2021, 89, 106044. [Google Scholar] [CrossRef]
- Wang, D.Y.; Wang, L.L.; Lou, Z.; Zheng, Y.Q.; Wang, K.; Zhao, L.J.; Han, W.; Jiang, K.; Shen, G.Z. Biomimetic, biocompatible and robust silk Fibroin-MXene film with stable 3D cross-link structure for flexible pressure sensors. Nano Energy 2020, 78, 105252. [Google Scholar] [CrossRef]
- Ai, Y.F.; Lou, Z.; Chen, S.; Chen, D.; Wang, Z.M.; Jiang, K.; Shen, G. All rGO-on-PVDF-nanofibers based self-powered electronic skins. Nano Energy 2017, 35, 121–127. [Google Scholar] [CrossRef]
- Anand, A.; Meena, D.; Bhatnagar, M.C. Synthesis and characterization of flexible PVDF/Bi2Al4O9/RGO based piezoelectric materials for nanogenerator application. J. Alloy. Compd. 2020, 843, 156019. [Google Scholar] [CrossRef]
- Katsouras, I.; Asadi, K.; Li, M.; Driel, T.; Kjaer, K.S.; Dong, Z.; Lenz, T.; Yun, G.; Blom, P.; Damjanovic, D. The negative piezoelectric effect of the ferroelectric polymer poly(vinylidene fluoride). Nat. Mater. 2016, 15, 78–84. [Google Scholar] [CrossRef] [Green Version]
- Guo, W.Z.; Tan, C.X.; Shi, K.M.; Li, J.W.; Wang, X.X.; Sun, B.; Huang, X.Y.; Long, Y.Z.; Jiang, P.K. Wireless piezoelectric device based on electrospun PVDF/BaTiO3 NW nanocomposite fibers for human motion monitoring. Nanoscale 2018, 37, 17751–17760. [Google Scholar] [CrossRef]
- Tian, G.; Deng, W.L.; Xiong, D.; Yang, T.; Zhang, B.B.; Ren, X.R.; Lan, B.L.; Zhong, S.; Jin, L.; Zhang, H.R.; et al. Dielectric micro-capacitance for enhancing piezoelectricity via aligning MXene sheets in composites. Cell Rep. Phys. Sci. 2022, 3, 100814. [Google Scholar] [CrossRef]
- Sharma, S.; Chhetry, A.; Sharifuzzaman, M.; Yoon, H.; Park, J.Y. Wearable Capacitive Pressure Sensor Based on MXene Composite Nanofibrous Scaffolds for Reliable Human Physiological Signal Acquisition. ACS Appl. Mater. Inter. 2020, 12, 22212–22224. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.H.; Hu, Y.J.; Zhuo, H.X.; Liu, L.X.; Jing, S.S.; Zhong, L.X.; Peng, X.W.; Sun, R.C. Compressible, elastic, and pressure-sensitive carbon aerogels derived from 2D titanium carbide nanosheets and bacterial cellulose for wearable sensors. Chem. Mater. 2019, 31, 3301–3312. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, J.F.; Zhang, C.C.; Sun, M.Y.; Han, S.W.; Zhang, R.T.; Liang, N.; Sun, D.H.; Liu, H. Energy-efficient, fully flexible, high-performance tactile sensor based on piezotronic effect: Piezoelectric signal amplified with organic field-effect transistors. Nano Energy 2020, 76, 2211–2855. [Google Scholar] [CrossRef]
- Park, D.Y.; Joe, D.J.; Kim, D.H.; Park, H.; Han, J.H.; Jeong, C.K.; Jeong, C.K.; Park, H.; Park, J.G.; Joung, B.; et al. Self-Powered Real-Time Arterial Pulse Monitoring Using Ultrathin Epidermal Piezoelectric Sensors. Adv. Mater. 2017, 29, 1702308. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Dong, Y.C.; Hossain, M.M.; Gorman, S.; Towfeeq, I.; Gajula, D.; Childress, A.; Rao, A.M.; Koley, G. Piezoresistive graphene/P(VDF-TrFE) heterostructure based highly sensitive and flexible pressure sensor. ACS Appl. Mater. Inter. 2019, 11, 16006–16017. [Google Scholar] [CrossRef] [PubMed]
- Gong, S.; Schwalb, W.; Wang, Y.W.; Chen, Y.; Tang, Y.; Si, J.; Shirinzadeh, B.; Cheng, W.L. A wearable and highly sensitive pressure sensor with ultrathin gold nanowires. Nat. Commun. 2014, 5, 3132. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Materials | Sensitivity | Responsiveness | Reference |
|---|---|---|---|---|
| Piezoresistive | PVDF/MXene/rGO | 29.27 kPa−1 | 36/55 ms | This work |
| MXene/rGO | 22.56 kPa−1 | 245/212 msk. | [26] | |
| SF@MXene Ti3C2Tx | 25.5 kPa−1 | 40/35 ms | [45] | |
| MXene/PVDF-TrFE | 0.51 kPa−1 | 150/150 ms | [51] | |
| MXene/bacterial | 12.5 kPa−1 | 167/121 ms | [52] | |
| P(VDF-TrFE)/rGO | 14.5 kPa−1 | ----------- | [28] | |
| Piezoelectricity | PVDF/MXene/rGO | 8.84 kPa−1 | 18.2 ms | This work |
| PVDF nanorod | 5.17 kPa−1 | 150 ms | [53] | |
| PET-Self-Powered | 0.018 kPa−1 | 60 ms | [54] | |
| Graphene/P(VDF-TrFE) | 0.76 kPa−1 | <100 ms | [55] | |
| AuNW | >1.14 kPa−1 | <17 ms | [56] | |
| P(VDF-TrFE)/rGO | 1.62 V/kPa | ----------- | [28] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Zhang, L.; Wu, T.; Song, H.; Tang, C. Dual-Mode Flexible Sensor Based on PVDF/MXene Nanosheet/Reduced Graphene Oxide Composites for Electronic Skin. Nanomaterials 2023, 13, 102. https://doi.org/10.3390/nano13010102
Liang H, Zhang L, Wu T, Song H, Tang C. Dual-Mode Flexible Sensor Based on PVDF/MXene Nanosheet/Reduced Graphene Oxide Composites for Electronic Skin. Nanomaterials. 2023; 13(1):102. https://doi.org/10.3390/nano13010102
Chicago/Turabian StyleLiang, Hu, Libing Zhang, Ting Wu, Haijun Song, and Chengli Tang. 2023. "Dual-Mode Flexible Sensor Based on PVDF/MXene Nanosheet/Reduced Graphene Oxide Composites for Electronic Skin" Nanomaterials 13, no. 1: 102. https://doi.org/10.3390/nano13010102