

A Hierarchical Theory for the Tensile Stiffness of Non-Buckling Fractal-Inspired Interconnects


 , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theory of the Non-Buckling Fractal-Inspired Interconnects with Arbitrary Shape at Each Order
2.1. Elastic Strain Energy Density of the First-Order Interconnects
2.2. Recursion Relations between the Interconnects of Adjacent Two Orders
2.3. Flexibility Matrix and Tensile Stiffness of Order-n Interconnects
3. Theoretical Analysis of Self-Similar Zigzag Interconnects
3.1. Shape Parameters and Recursive Formula
3.2. Flexibility Matrix of the Self-Similar Zigzag Interconnects
4. Finite Element Analysis and Discussion on the Shape Parameters
4.1. Dimensionless Flexibility Matrix
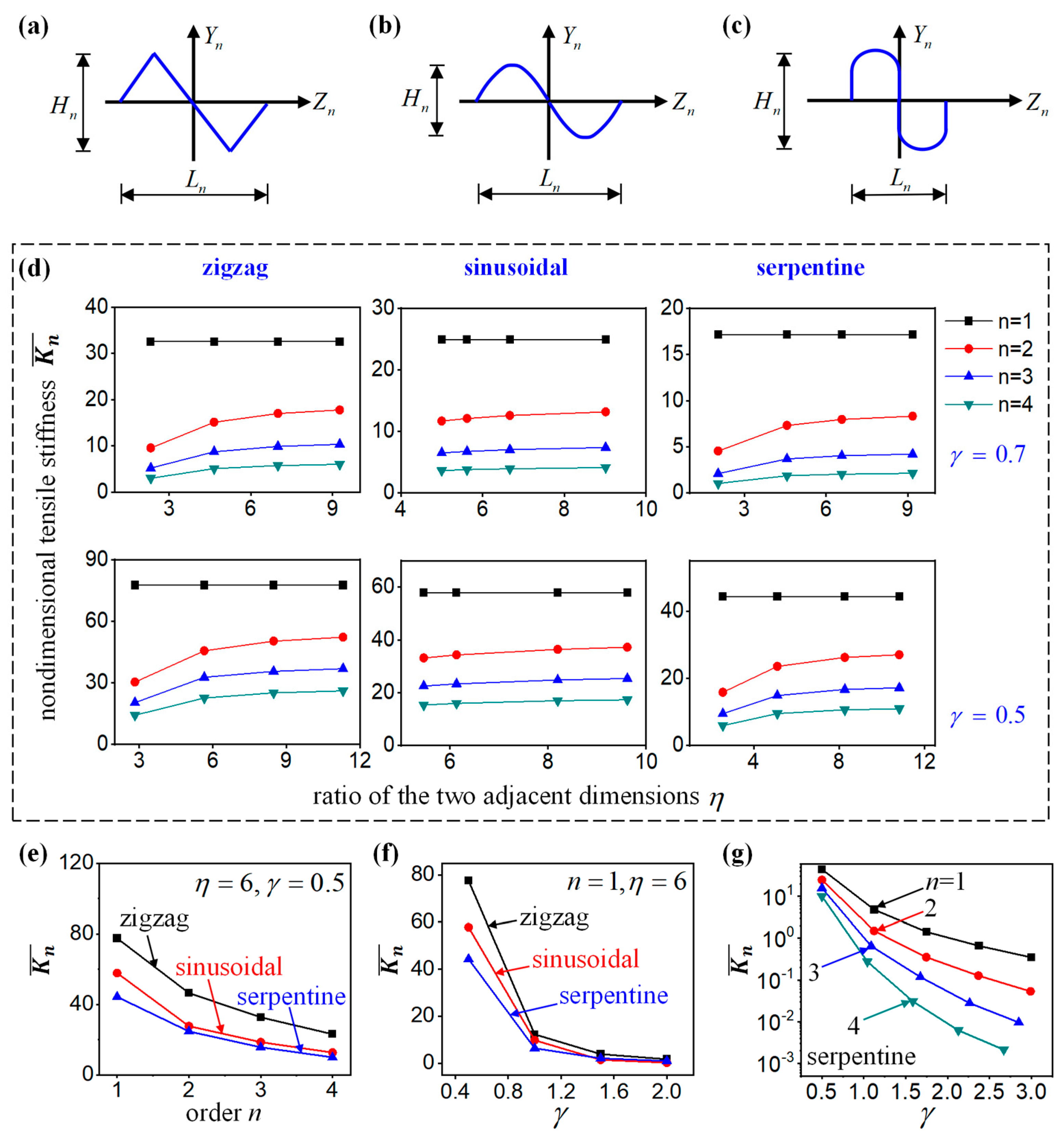
4.2. Effect of the Shape Parameters γ and η
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Schwartz, G.; Tee, B.C.-K.; Mei, J.; Appleton, A.L.; Kim, D.H.; Wang, H.; Bao, Z. Flexible polymer transistors with high pressure sensitivity for application in electronic skin and health monitoring. Nat. Commun. 2013, 4, 1859–1867. [Google Scholar] [CrossRef]
- Jeong, H.; Lee, J.Y.; Lee, K.; Kang, Y.J.; Kim, J.-T.; Avila, R.; Tzavelis, A.; Kim, J.; Ryu, H.; Kwak, S.S.; et al. Differential cardiopulmonary monitoring system for artifact-canceled physiological tracking of athletes, workers, and COVID-19 patients. Sci. Adv. 2021, 7, eabg3092. [Google Scholar] [CrossRef] [PubMed]
- Bhattacharya, S.; Nikbakht, M.; Alden, A.; Tan, P.L.; Wang, J.T.; Alhalimi, T.A.; Kim, S.; Wang, P.L.; Tanaka, H.; Tandon, A.; et al. A Chest-Conformable, Wireless Electro-Mechanical E-Tattoo for Measuring Multiple Cardiac Time Intervals. Adv. Electron. Mater. 2023, 9, 2201284. [Google Scholar] [CrossRef]
- Mickle, A.D.; Won, S.M.; Noh, K.N.; Yoon, J.; Meacham, K.W.; Xue, Y.; McIlvried, L.A.; Copits, B.A.; Samineni, V.K.; Crawford, K.E.; et al. A wireless closed-loop system for optogenetic peripheral neuromodulation. Nature 2019, 565, 361. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.; Wang, H.; Ning, X.; Sun, R.; Albadawi, H.; Salomao, M.; Silva, A.C.; Yu, Y.; Tian, L.; Koh, A.; et al. Needle-shaped ultrathin piezoelectric microsystem for guided tissue targeting via mechanical sensing. Nat. Biomed. Eng. 2018, 2, 165. [Google Scholar] [CrossRef]
- Mishra, S.; Kim, Y.-S.; Intarasirisawat, J.; Kwon, Y.-T.; Lee, Y.; Mahmood, M.; Lim, H.-R.; Herbert, R.; Yu, K.J.; Ang, C.S.; et al. Soft, wireless periocular wearable electronics for real-time detection of eye vergence in a virtual reality toward mobile eye therapies. Sci. Adv. 2020, 6, eaay1729. [Google Scholar] [CrossRef]
- Yu, X.; Xie, Z.; Yu, Y.; Lee, J.; Vazquez-Guardado, A.; Luan, H.; Ruban, J.; Ning, X.; Akhtar, A.; Li, D.; et al. Skin-integrated wireless haptic interfaces for virtual and augmented reality. Nature 2019, 575, 473. [Google Scholar] [CrossRef]
- Li, S.; Liu, G.; Li, R.; Li, Q.; Zhao, Y.; Huang, M.; Zhang, M.; Yin, S.; Zhou, Y.; Tang, H.; et al. Contact-Resistance-Free Stretchable Strain Sensors with High Repeatability and Linearity. ACS Nano 2022, 16, 541. [Google Scholar] [CrossRef]
- Ko, H.C.; Stoykovich, M.P.; Song, J.; Malyarchuk, V.; Choi, W.M.; Yu, C.-J.; Iii, J.B.G.; Xiao, J.; Wang, S.; Huang, Y.; et al. A hemispherical electronic eye camera based on compressible silicon optoelectronics. Nature 2008, 454, 748. [Google Scholar] [CrossRef]
- Su, Y.W.; Ping, X.C.; Yu, K.J.; Lee, J.W.; Fan, J.A.; Wang, B.; Li, M.; Li, R.; Harburg, D.V.; Huang, Y.A.; et al. In-Plane Deformation Mechanics for Highly Stretchable Electronics. Adv. Mater. 2017, 29, 1604989. [Google Scholar] [CrossRef]
- Khang, D.-Y.; Jiang, H.; Huang, Y.; Rogers, J.A. A stretchable form of single-crystal silicon for high-performance electronics on rubber substrates. Science 2006, 311, 208. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.-H.; Ahn, J.-H.; Choi, W.M.; Kim, H.-S.; Kim, T.-H.; Song, J.; Huang, Y.Y.; Liu, Z.; Lu, C.; Rogers, J.A. Stretchable and foldable silicon integrated circuits. Science 2008, 320, 507. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Choi, W.M.; Jiang, H.; Huang, Y.Y.; Rogers, J.A. Controlled buckling of semiconductor nanoribbons for stretchable electronics. Nat. Nanotechnol. 2006, 1, 201. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.-H.; Song, J.; Choi, W.M.; Kim, H.-S.; Kim, R.-H.; Liu, Z.; Huang, Y.Y.; Hwang, K.-C.; Zhang, Y.-W.; Rogers, J.A. Materials and noncoplanar mesh designs for integrated circuits with linear elastic responses to extreme mechanical deformations. Proc. Natl. Acad. Sci. USA 2008, 105, 18675. [Google Scholar] [CrossRef]
- Song, J.; Huang, Y.; Xiao, J.; Wang, S.; Hwang, K.C.; Ko, H.C.; Kim, D.H.; Stoykovich, M.P.; Rogers, J.A. Mechanics of noncoplanar mesh design for stretchable electronic circuits. J. Appl. Phys. 2009, 105, 123516. [Google Scholar] [CrossRef]
- Wang, S.; Xiao, J.; Song, J.; Ko, H.C.; Hwang, K.-C.; Huang, Y.; Rogers, J.A. Mechanics of curvilinear electronics. Soft Matter 2010, 6, 5757. [Google Scholar] [CrossRef]
- Pan, T.; Pharr, M.; Ma, Y.; Ning, R.; Yan, Z.; Xu, R.; Feng, X.; Huang, Y.; Rogers, J.A. Experimental and Theoretical Studies of Serpentine Interconnects on Ultrathin Elastomers for Stretchable Electronics. Adv. Funct. Mater. 2017, 27, 1702589. [Google Scholar] [CrossRef]
- Widlund, T.; Yang, S.; Hsu, Y.-Y.; Lu, N. Stretchability and compliance of freestanding serpentine-shaped ribbons. Int. J. Solids Struct. 2014, 51, 4026. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.; Li, X.; Fan, J.A.; Xu, S.; Song, Y.M.; Choi, K.-J.; Yeo, W.-H.; Lee, W.; Nazaar, S.N.; et al. Experimental and Theoretical Studies of Serpentine Microstructures Bonded To Prestrained Elastomers for Stretchable Electronics. Adv. Funct. Mater. 2014, 24, 2028. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, S.; Fu, H.; Lee, J.; Su, J.; Hwang, K.-C.; Rogers, J.A.; Huang, Y. Buckling in serpentine microstructures and applications in elastomer-supported ultra-stretchable electronics with high areal coverage. Soft Matter 2013, 9, 8062–8070. [Google Scholar] [CrossRef]
- Yang, S.; Qiao, S.; Lu, N. Elasticity Solutions to Nonbuckling Serpentine Ribbons. J. Appl. Mech. 2017, 84, 021004. [Google Scholar] [CrossRef]
- Lv, C.; Yu, H.; Jiang, H. Archimedean spiral design for extremely stretchable interconnects. Extrem. Mech. Lett. 2014, 1, 29. [Google Scholar] [CrossRef]
- Rehman, M.U.; Rojas, J.P. Optimization of compound serpentine-spiral structure for ultra-stretchable electronics. Extrem. Mech. Lett. 2017, 15, 44. [Google Scholar] [CrossRef]
- Rojas, J.P.; Arevalo, A.; Foulds, I.G.; Hussain, M.M. Design and characterization of ultra-stretchable monolithic silicon fabric. Appl. Phys. Lett. 2014, 105, 154101. [Google Scholar] [CrossRef]
- Sung, W.-L.; Chen, C.-C.; Huang, K.; Fang, W. Development of a large-area chip network with multidevice integration using a stretchable electroplated copper spring. J. Micromech. Microeng. 2016, 26, 025003. [Google Scholar] [CrossRef]
- Jang, K.-I.; Li, K.; Chung, H.U.; Xu, S.; Jung, H.N.; Yang, Y.; Kwak, J.W.; Jung, H.H.; Song, J.; Yang, C.; et al. Self-assembled three dimensional network designs for soft electronics. Nat. Commun. 2017, 8, 15894. [Google Scholar] [CrossRef]
- Li, K.; Cheng, X.; Zhu, F.; Li, L.; Xie, Z.; Luan, H.; Wang, Z.; Ji, Z.; Wang, H.; Liu, F.; et al. A Generic Soft Encapsulation Strategy for Stretchable Electronics. Adv. Funct. Mater. 2019, 29, 1806630. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, Z.; Lin, Q.; Guo, X.; Han, M.; Nan, K.; Hwang, K.; Huang, Y.; Zhang, Y.; Rogers, J.A. Guided Formation of 3D Helical Mesostructures by Mechanical Buckling: Analytical Modeling and Experimental Validation. Adv. Funct. Mater. 2016, 26, 2909. [Google Scholar] [CrossRef]
- Xu, S.; Yan, Z.; Jang, K.-I.; Huang, W.; Fu, H.; Kim, J.; Wei, Z.; Flavin, M.; McCracken, J.; Wang, R.; et al. Assembly of micro/nanomaterials into complex, three-dimensional architectures by compressive buckling. Science 2015, 347, 154. [Google Scholar] [CrossRef]
- Li, S.; Han, M.; Rogers, J.A.; Zhang, Y.; Huang, Y.; Wang, H. Mechanics of buckled serpentine structures formed via mechanics-guided, deterministic three-dimensional assembly. J. Mech. Phys. Solids 2019, 125, 736. [Google Scholar] [CrossRef]
- Ranji, A.R.; Li, A.; Alirezaee, S.; Ahamed, M.J. Analytical modeling of an inclined folded-beam spring used in micromechanical resonator devices. Eng. Res. Express 2023, 5, 035016. [Google Scholar] [CrossRef]
- Fan, J.A.; Yeo, W.-H.; Su, Y.; Hattori, Y.; Lee, W.; Jung, S.-Y.; Zhang, Y.; Liu, Z.; Cheng, H.; Falgout, L.; et al. Fractal design concepts for stretchable electronics. Nat. Commun. 2014, 5, 3266. [Google Scholar] [CrossRef] [PubMed]
- NNorton, J.J.S.; Lee, D.S.; Lee, J.W.; Lee, W.; Kwon, O.; Won, P.; Jung, S.-Y.; Cheng, H.; Jeong, J.-W.; Akce, A.; et al. Soft, curved electrode systems capable of integration on the auricle as a persistent brain-computer interface. Proc. Natl. Acad. Sci. USA 2015, 112, 3920. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.Z.; Gutbrod, S.R.; Ma, Y.J.; Petrossians, A.; Liu, Y.H.; Webb, R.C.; Fan, J.A.; Yang, Z.J.; Xu, R.X.; Whalen, J.J.; et al. Materials and Fractal Designs for 3D Multifunctional Integumentary Membranes with Capabilities in Cardiac Electrotherapy. Adv. Mater. 2015, 27, 1731. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Zhang, Y.; Cho, J.; Lee, J.; Huang, X.; Jia, L.; Fan, J.A.; Su, Y.; Su, J.; Zhang, H.; et al. Stretchable batteries with self-similar serpentine interconnects and integrated wireless recharging systems. Nat. Commun. 2013, 4, 1543. [Google Scholar] [CrossRef]
- Xu, S.; Zhang, Y.; Jia, L.; Mathewson, K.E.; Jang, K.-I.; Kim, J.; Fu, H.; Huang, X.; Chava, P.; Wang, R.; et al. Soft Microfluidic Assemblies of Sensors, Circuits, and Radios for the Skin. Science 2014, 344, 70. [Google Scholar] [CrossRef]
- Tian, L.M.; Zimmerman, B.; Akhtar, A.; Yu, K.J.; Moore, M.; Wu, J.; Larsen, R.J.; Lee, J.W.; Li, J.H.; Liu, Y.H.; et al. Large-area MRI-compatible epidermal electronic interfaces for prosthetic control and cognitive monitoring. Nat. Biomed. Eng. 2019, 3, 194. [Google Scholar] [CrossRef]
- Kim, J.; Lee, M.; Shim, H.J.; Ghaffari, R.; Cho, H.R.; Son, D.; Jung, Y.H.; Soh, M.; Choi, C.; Jung, S.; et al. Stretchable silicon nanoribbon electronics for skin prosthesis. Nat. Commun. 2014, 5, 5747. [Google Scholar] [CrossRef]
- Jin, P.; Fu, J.; Wang, F.; Zhang, Y.; Wang, P.; Liu, X.; Jiao, Y.; Li, H.; Chen, Y.; Ma, Y.; et al. A flexible, stretchable system for simultaneous acoustic energy transfer and communication. Sci. Adv. 2021, 7, eabg2507. [Google Scholar] [CrossRef]
- Zhang, Y.; Fu, H.; Su, Y.; Xu, S.; Cheng, H.; Fan, J.A.; Hwang, K.-C.; Rogers, J.A.; Huang, Y. Mechanics of ultra-stretchable self-similar serpentine interconnects. Acta Mater. 2013, 61, 7816–7827. [Google Scholar] [CrossRef]
- Zhang, Y.; Fu, H.; Xu, S.; Fan, J.A.; Hwang, K.-C.; Jiang, J.; Rogers, J.A.; Huang, Y. A hierarchical computational model for stretchable interconnects with fractal-inspired designs. J. Mech. Phys. Solids 2014, 72, 115. [Google Scholar] [CrossRef]
- Su, Y.; Wang, S.; Huang, Y.; Luan, H.; Dong, W.; Fan, J.A.; Yang, Q.; Rogers, J.A.; Huang, Y. Elasticity of fractal inspired interconnects. Small 2015, 11, 367. [Google Scholar] [CrossRef] [PubMed]
- Ma, Q.; Zhang, Y. Mechanics of Fractal-Inspired Horseshoe Microstructures for Applications in Stretchable Electronics. J. Appl. Mech. 2016, 83, 111008. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Zhou, Z.; Li, R.; Wang, J.; Sha, B.; Li, S.; Su, Y. A Hierarchical Theory for the Tensile Stiffness of Non-Buckling Fractal-Inspired Interconnects. Nanomaterials 2023, 13, 2542. https://doi.org/10.3390/nano13182542
Wang Y, Zhou Z, Li R, Wang J, Sha B, Li S, Su Y. A Hierarchical Theory for the Tensile Stiffness of Non-Buckling Fractal-Inspired Interconnects. Nanomaterials. 2023; 13(18):2542. https://doi.org/10.3390/nano13182542
Chicago/Turabian StyleWang, Yongkang, Zanxin Zhou, Rui Li, Jianru Wang, Baolin Sha, Shuang Li, and Yewang Su. 2023. "A Hierarchical Theory for the Tensile Stiffness of Non-Buckling Fractal-Inspired Interconnects" Nanomaterials 13, no. 18: 2542. https://doi.org/10.3390/nano13182542
APA StyleWang, Y., Zhou, Z., Li, R., Wang, J., Sha, B., Li, S., & Su, Y. (2023). A Hierarchical Theory for the Tensile Stiffness of Non-Buckling Fractal-Inspired Interconnects. Nanomaterials, 13(18), 2542. https://doi.org/10.3390/nano13182542