
Graphene-Doped Thermoplastic Polyurethane Nanocomposite Film-Based Triboelectric Nanogenerator for Self-Powered Sport Sensor

 , , , and
, , , and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
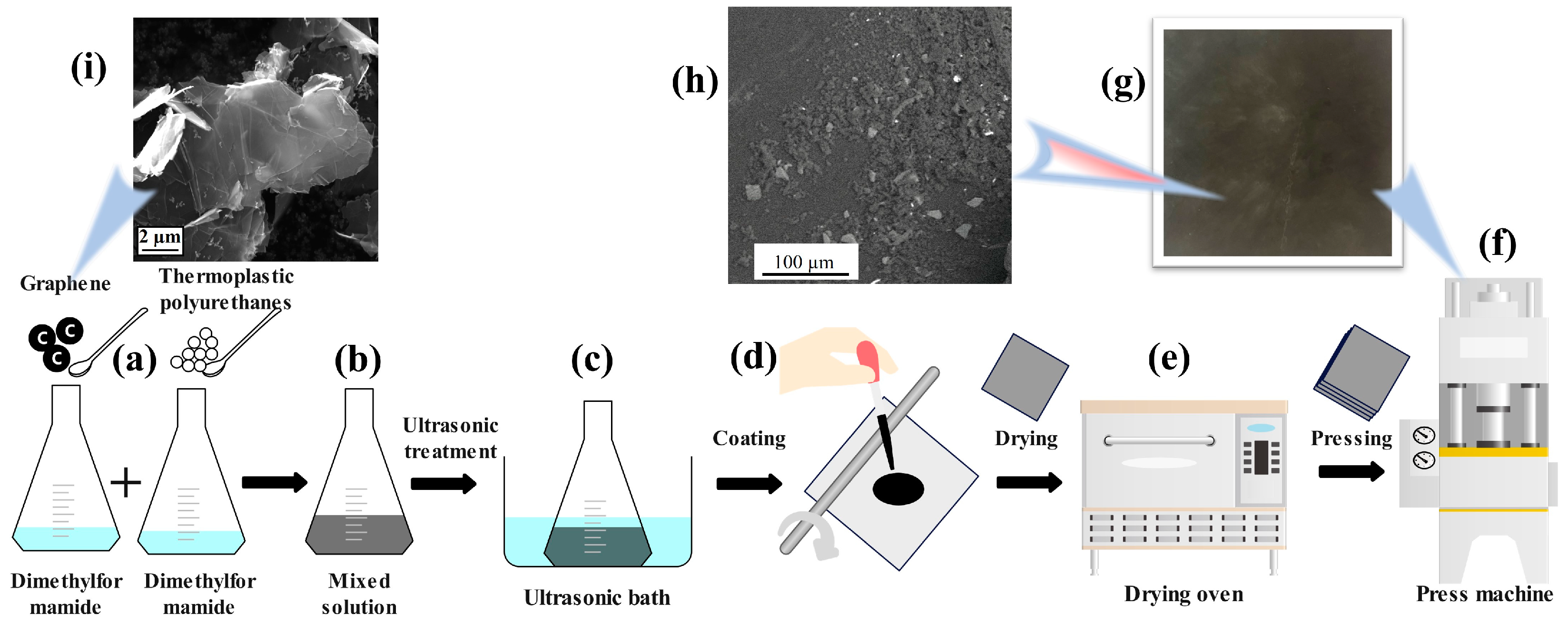
2.2. Preparation of Graphene-Doped TPU Nanocomposite Films
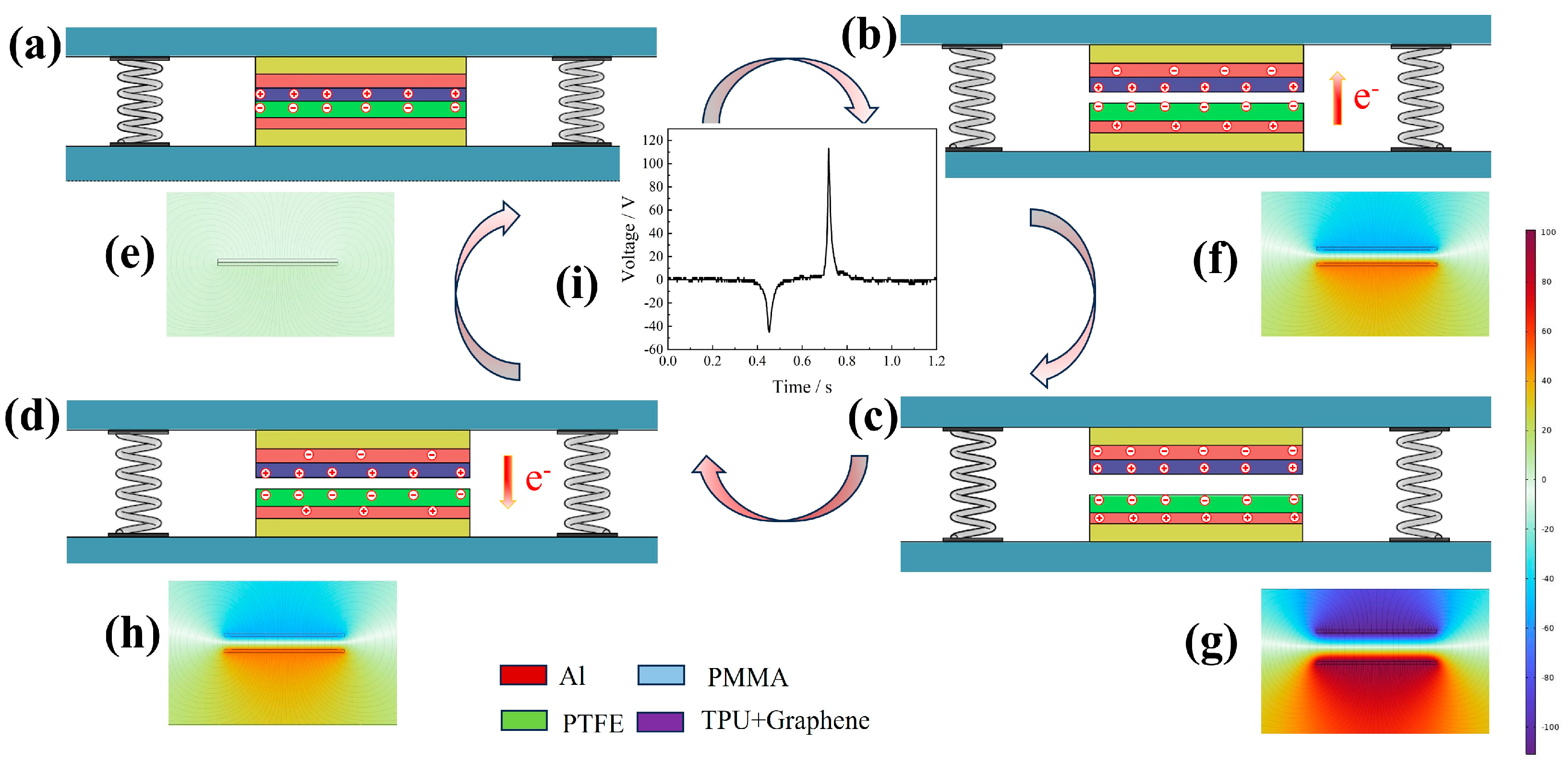
2.3. Assembly and Working Principle of TENG
3. Results
3.1. GT-TENG Electrical Output
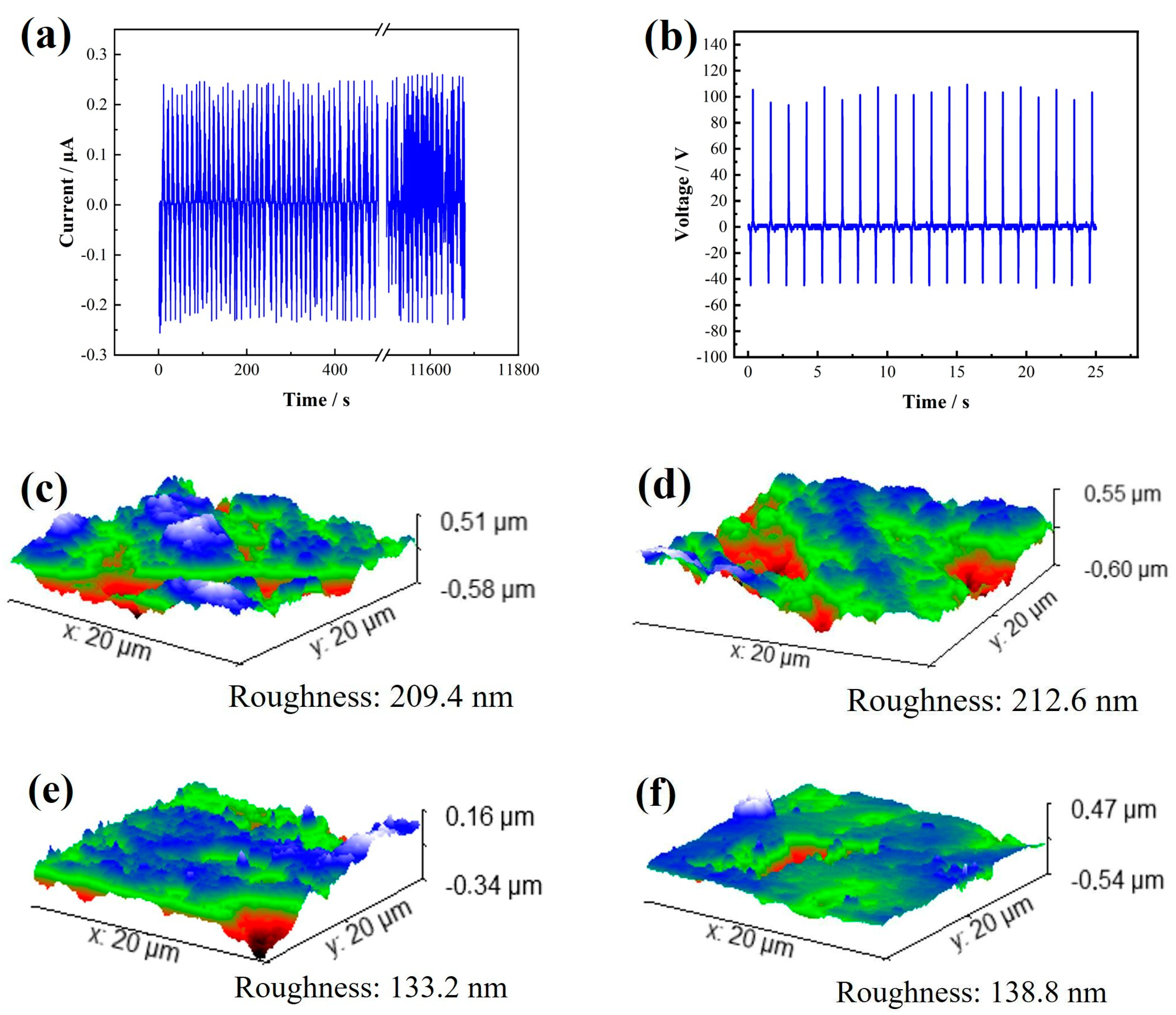
3.2. Durability of GT-TENG
3.3. Practical Application of GT-TENG
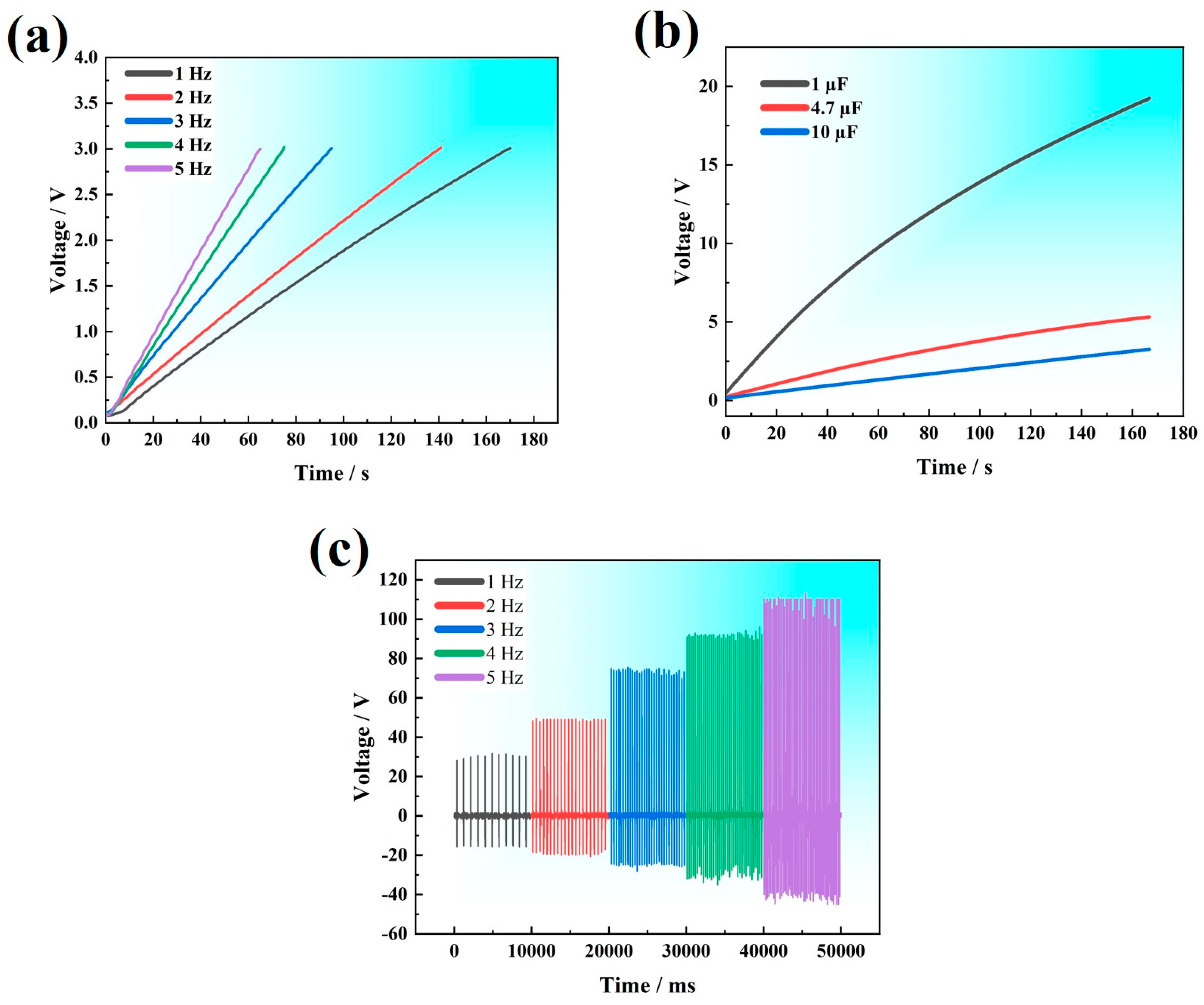
3.3.1. Micro–Nano Power
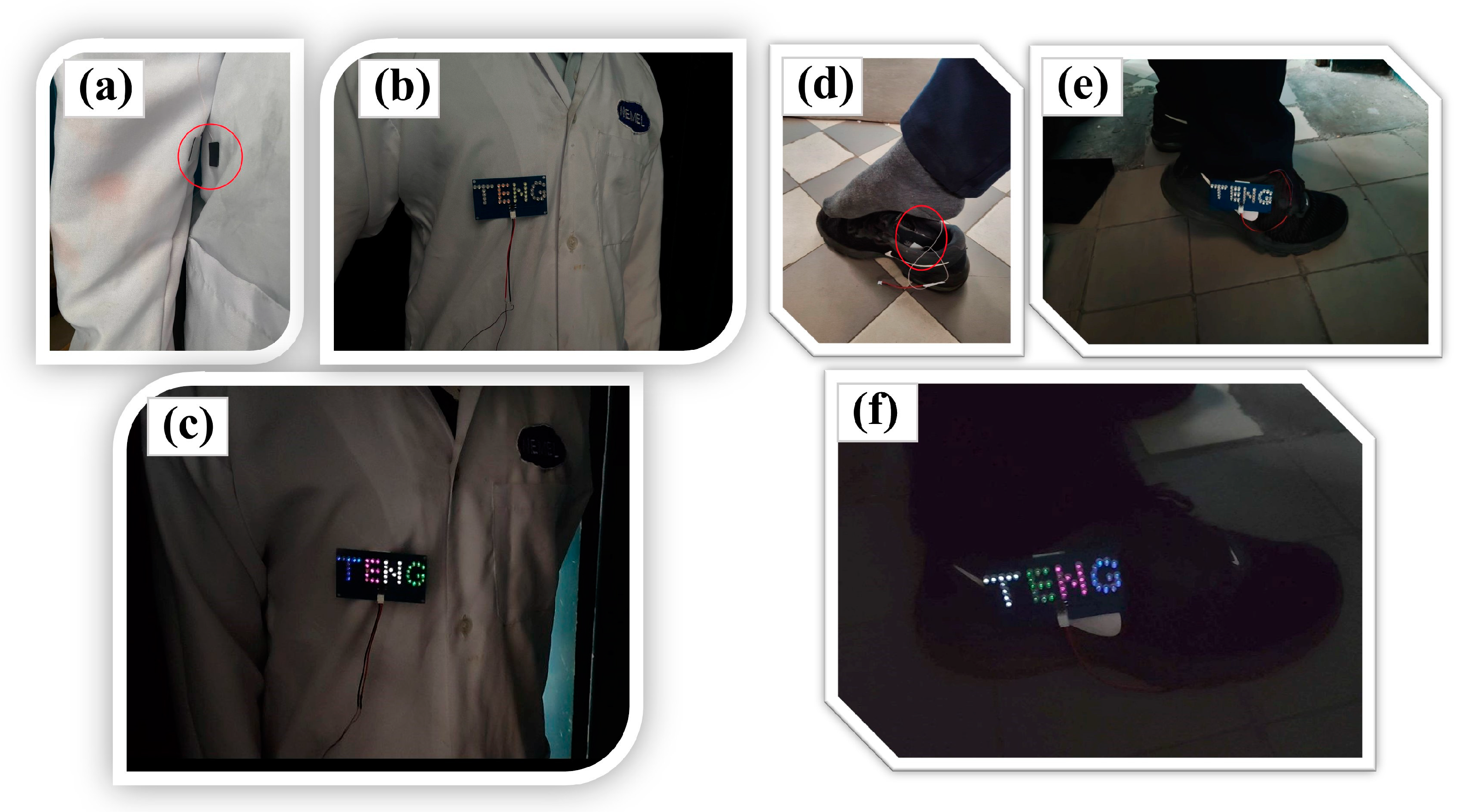
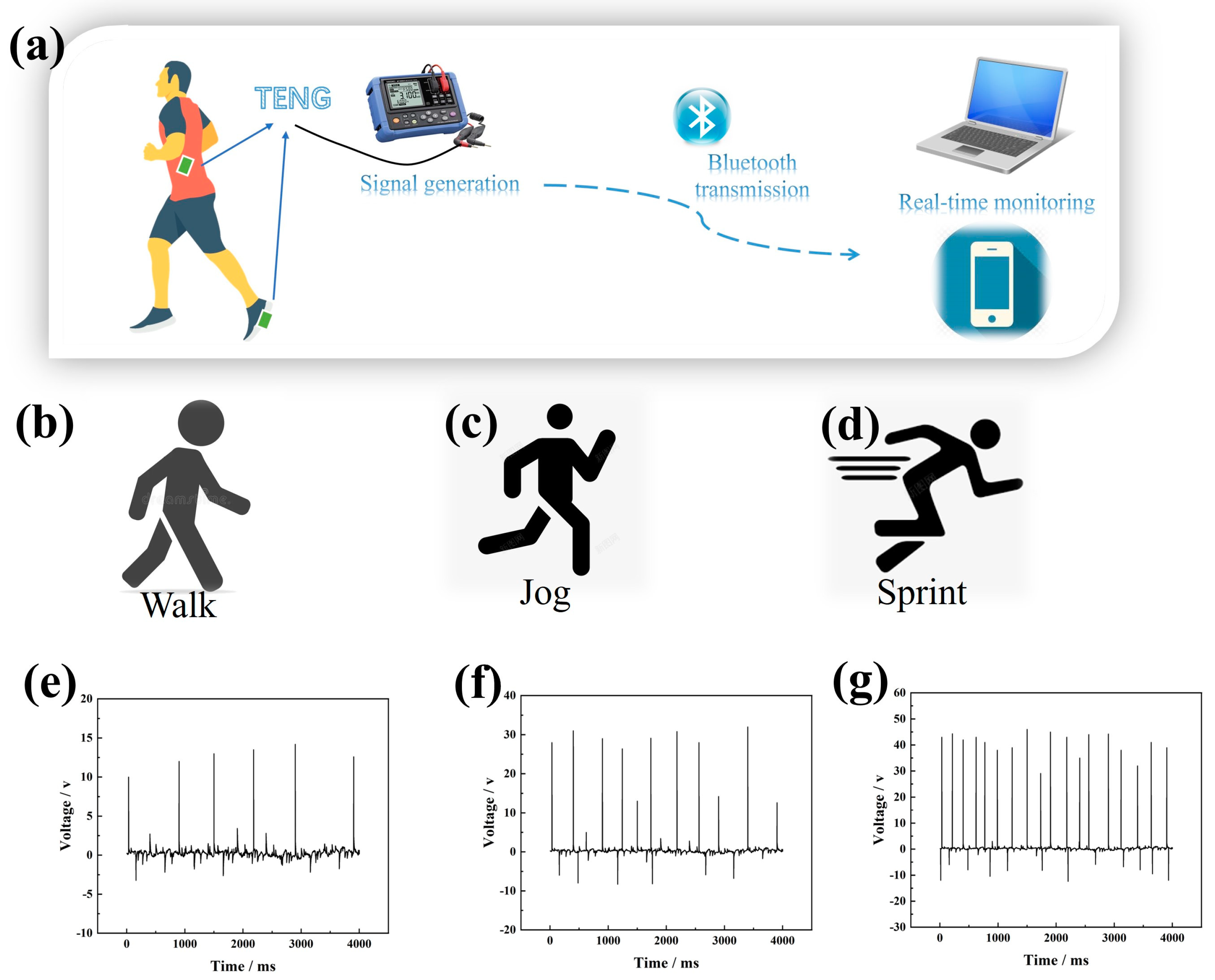
3.3.2. Conversion of Kinetic to Electrical Energy from Human and Self-Powered Monitoring
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Korkmaz, S.; Kariper, İ.A. Production and applications of flexible/wearable triboelectric nanogenerator (TENGS). Synth. Met. 2021, 273, 116692. [Google Scholar] [CrossRef]
- Varghese, H.; Abdul Hakkeem, H.M.; Farman, M.; Thouti, E.; Pillai, S.; Chandran, A. Self-powered flexible triboelectric touch sensor based on micro-pyramidal PDMS films and cellulose acetate nanofibers. Results Eng. 2022, 16, 100550. [Google Scholar] [CrossRef]
- Peng, X.; Dong, K.; Ning, C.; Cheng, R.; Yi, J.; Zhang, Y.; Sheng, F.; Wu, Z.; Wang, Z.L. All-Nanofiber Self-Powered Skin-Interfaced Real-Time Respiratory Monitoring System for Obstructive Sleep Apnea-Hypopnea Syndrome Diagnosing. Adv. Funct. Mater. 2021, 31, 2103559. [Google Scholar] [CrossRef]
- Zhu, G.; Ren, P.; Yang, J.; Hu, J.; Dai, Z.; Chen, H.; Li, Y.; Li, Z. Self-powered and multi-mode flexible sensing film with patterned conductive network for wireless monitoring in healthcare. Nano Energy 2022, 98, 107327. [Google Scholar] [CrossRef]
- Luo, J.; Han, K.; Wu, X.; Cai, H.; Jiang, T.; Zhou, H.; Wang, Z.L. Self-powered mobile sterilization and infection control system. Nano Energy 2021, 88, 106313. [Google Scholar] [CrossRef]
- Kim, W.G.; Kim, D.W.; Tcho, I.W.; Kim, J.K.; Kim, M.S.; Choi, Y.K. Triboelectric Nanogenerator: Structure, Mechanism, and Applications. ACS Nano 2021, 15, 258–287. [Google Scholar] [CrossRef]
- Cao, Y.; Guo, Y.; Chen, Z.; Yang, W.; Li, K.; He, X.; Li, J. Highly sensitive self-powered pressure and strain sensor based on crumpled MXene film for wireless human motion detection. Nano Energy 2022, 92, 106689. [Google Scholar] [CrossRef]
- Xiao, X.; Zhang, X.; Wang, S.; Ouyang, H.; Chen, P.; Song, L.; Yuan, H.; Ji, Y.; Wang, P.; Li, Z.; et al. Honeycomb Structure Inspired Triboelectric Nanogenerator for Highly Effective Vibration Energy Harvesting and Self-Powered Engine Condition Monitoring. Adv. Energy Mater. 2019, 9, 1902460. [Google Scholar] [CrossRef]
- Toyabur Rahman, M.; Sohel Rana, S.M.; Salauddin, M.; Maharjan, P.; Bhatta, T.; Kim, H.; Cho, H.; Park, J.Y. A highly miniaturized freestanding kinetic-impact-based non-resonant hybridized electromagnetic-triboelectric nanogenerator for human induced vibrations harvesting. Appl. Energy 2020, 279, 115799. [Google Scholar] [CrossRef]
- Adonijah Graham, S.; Dudem, B.; Patnam, H.; Mule, A.R.; Yu, J.S. Integrated Design of Highly Porous Cellulose-Loaded Polymer-Based Triboelectric Films toward Flexible, Humidity-Resistant, and Sustainable Mechanical Energy Harvesters. ACS Energy Lett. 2020, 5, 2140–2148. [Google Scholar] [CrossRef]
- Bhatia, D.; Kim, W.; Lee, S.; Kim, S.W.; Choi, D. Tandem triboelectric nanogenerators for optimally scavenging mechanical energy with broadband vibration frequencies. Nano Energy 2017, 33, 515–521. [Google Scholar] [CrossRef]
- Wang, Z.; An, J.; Nie, J.; Luo, J.; Shao, J.; Jiang, T.; Chen, B.; Tang, W.; Wang, Z.L. A Self-Powered Angle Sensor at Nanoradian-Resolution for Robotic Arms and Personalized Medicare. Adv. Mater. 2020, 32, 2001466. [Google Scholar] [CrossRef] [PubMed]
- Ankanahalli Shankaregowda, S.; Sagade Muktar Ahmed, R.F.; Nanjegowda, C.B.; Wang, J.; Guan, S.; Puttaswamy, M.; Amini, A.; Zhang, Y.; Kong, D.; Sannathammegowda, K.; et al. Single-electrode triboelectric nanogenerator based on economical graphite coated paper for harvesting waste environmental energy. Nano Energy 2019, 66, 104141. [Google Scholar] [CrossRef]
- Saadatnia, Z.; Mosanenzadeh, S.G.; Esmailzadeh, E.; Naguib, H.E. A High Performance Triboelectric Nanogenerator Using Porous Polyimide Aerogel Film. Sci. Rep. 2019, 9, 1370. [Google Scholar] [CrossRef] [PubMed]
- Fu, J.; Xia, K.; Xu, Z. A triboelectric nanogenerator based on human fingernail to harvest and sense body energy. Microelectron. Eng. 2020, 232, 111408. [Google Scholar] [CrossRef]
- Fan, F.-R.; Tian, Z.-Q.; Lin Wang, Z. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Wang, Z.L. On the first principle theory of nanogenerators from Maxwell’s equations. Nano Energy 2020, 68, 104272. [Google Scholar] [CrossRef]
- Wang, Z.L. On Maxwell’s displacement current for energy and sensors: The origin of nanogenerators. Mater. Today 2017, 20, 74–82. [Google Scholar] [CrossRef]
- Li, D.; Xu, C.; Liao, Y.; Cai, W.; Zhu, Y.; Wang, Z.L. Interface inter-atomic electron-transition induced photon emission in contact-electrification. Sci. Adv. 2021, 7, eabj0349. [Google Scholar] [CrossRef]
- Lin, S.; Xu, L.; Xu, C.; Chen, X.; Wang, A.C.; Zhang, B.; Lin, P.; Yang, Y.; Zhao, H.; Wang, Z.L. Electron Transfer in Nanoscale Contact Electrification: Effect of Temperature in the Metal–Dielectric Case. Adv. Mater. 2019, 31, 1808197. [Google Scholar] [CrossRef]
- Wei, X.; Zhao, Z.; Zhang, C.; Yuan, W.; Wu, Z.; Wang, J.; Wang, Z.L. All-Weather Droplet-Based Triboelectric Nanogenerator for Wave Energy Harvesting. ACS Nano 2021, 15, 13200–13208. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Bao, G.; Xie, S.; Chen, X. A paradigm-shift self-powered optical sensing system enabled by the rotation driven instantaneous discharging triboelectric nanogenerator (RDID-TENG). Nano Energy 2023, 115, 108732. [Google Scholar] [CrossRef]
- Pang, H.; Feng, Y.; An, J.; Chen, P.; Han, J.; Jiang, T.; Wang, Z.L. Segmented Swing-Structured Fur-Based Triboelectric Nanogenerator for Harvesting Blue Energy toward Marine Environmental Applications. Adv. Funct. Mater. 2021, 31, 2106398. [Google Scholar] [CrossRef]
- Liu, J.; Zhou, L.; Gao, Y.; Yang, P.; Liu, D.; Qiao, W.; Zhang, B.; Zhao, Z.; Wang, Z.L.; Wang, J. Achieving Ultra-High Voltage (≈10 kV) Triboelectric Nanogenerators. Adv. Energy Mater. 2023, 13, 2300410. [Google Scholar] [CrossRef]
- Cao, X.; Xiong, Y.; Sun, J.; Xie, X.; Sun, Q.; Wang, Z.L. Multidiscipline Applications of Triboelectric Nanogenerators for the Intelligent Era of Internet of Things. Nanomicro Lett. 2022, 15, 14. [Google Scholar] [CrossRef]
- Li, Y.; Yu, J.; Wei, Y.; Wang, Y.; Feng, Z.; Cheng, L.; Huo, Z.; Lei, Y.; Sun, Q. Recent Progress in Self-Powered Wireless Sensors and Systems Based on TENG. Sensors 2023, 23, 1329. [Google Scholar] [CrossRef]
- Rahimi Sardo, F.; Rayegani, A.; Matin Nazar, A.; Balaghiinaloo, M.; Saberian, M.; Mohsan, S.A.H.; Alsharif, M.H.; Cho, H.-S. Recent Progress of Triboelectric Nanogenerators for Biomedical Sensors: From Design to Application. Biosensors 2022, 12, 697. [Google Scholar] [CrossRef]
- Zu, G.; Wei, Y.; Sun, C.; Yang, X. Humidity-resistant, durable, wearable single-electrode triboelectric nanogenerator for mechanical energy harvesting. J. Mater. Sci. 2022, 57, 2813–2824. [Google Scholar] [CrossRef]
- Chen, S.-N.; Chen, C.-H.; Lin, Z.-H.; Tsao, Y.-H.; Liu, C.-P. On enhancing capability of tribocharge transfer of ZnO nanorod arrays by Sb doping for anomalous output performance improvement of triboelectric nanogenerators. Nano Energy 2018, 45, 311–318. [Google Scholar] [CrossRef]
- Harnchana, V.; Ngoc, H.V.; He, W.; Rasheed, A.; Park, H.; Amornkitbamrung, V.; Kang, D.J. Enhanced Power Output of a Triboelectric Nanogenerator using Poly(dimethylsiloxane) Modified with Graphene Oxide and Sodium Dodecyl Sulfate. ACS Appl. Mater. Interfaces 2018, 10, 25263–25272. [Google Scholar] [CrossRef]
- Xia, X.; Chen, J.; Liu, G.; Javed, M.S.; Wang, X.; Hu, C. Aligning graphene sheets in PDMS for improving output performance of triboelectric nanogenerator. Carbon 2017, 111, 569–576. [Google Scholar] [CrossRef]
- Zhao, X.; Chen, B.; Wei, G.; Wu, J.M.; Han, W.; Yang, Y. Polyimide/Graphene Nanocomposite Foam-Based Wind-Driven Triboelectric Nanogenerator for Self-Powered Pressure Sensor. Adv. Mater. Technol. 2019, 4, 1800723. [Google Scholar] [CrossRef]
- Shooshtari, L.; Ghods, S.; Mohammadpour, R.; Esfandiar, A.; Iraji zad, A. Design of effective self-powered SnS2/halide perovskite photo-detection system based on triboelectric nanogenerator by regarding circuit impedance. Sci. Rep. 2022, 12, 7227. [Google Scholar] [CrossRef] [PubMed]
- Chomjun, T.; Appamato, I.; Harnchana, V.; Amornkitbamrung, V. Eco-Friendly Triboelectric Material Based on Natural Rubber and Activated Carbon from Human Hair. Polymers 2022, 14, 1110. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Matrix Material | Doping Material | Maximum Power/Power Density | Durability | Application | Reference |
|---|---|---|---|---|---|
| Polyimide | Graphene | 0.22 mW | Not tested | Self-Powered Pressure Sensor | [32] |
| Kapton | Graphene Oxide | 10 mW/cm2 | Not tested | Self-Powered Photodetector | [33] |
| Rubber | Activated carbon | 242 mW/m2 | Not tested | Motion-Sensing | [34] |
| Silicon Rubber | MoS2/GO | 1.3 mW | Stable | Power Wearable Electronics | [28] |
| Polyurethane | Graphene | 54.62 mW/m2 | Excellent | Wireless Self-Powered Sport Sensor | Our Work |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.; Larionova, T.; Kobykhno, I.; Klinkov, V.; Shalnova, S.; Tolochko, O. Graphene-Doped Thermoplastic Polyurethane Nanocomposite Film-Based Triboelectric Nanogenerator for Self-Powered Sport Sensor. Nanomaterials 2024, 14, 1549. https://doi.org/10.3390/nano14191549
Yang S, Larionova T, Kobykhno I, Klinkov V, Shalnova S, Tolochko O. Graphene-Doped Thermoplastic Polyurethane Nanocomposite Film-Based Triboelectric Nanogenerator for Self-Powered Sport Sensor. Nanomaterials. 2024; 14(19):1549. https://doi.org/10.3390/nano14191549
Chicago/Turabian StyleYang, Shujie, Tatiana Larionova, Ilya Kobykhno, Victor Klinkov, Svetlana Shalnova, and Oleg Tolochko. 2024. "Graphene-Doped Thermoplastic Polyurethane Nanocomposite Film-Based Triboelectric Nanogenerator for Self-Powered Sport Sensor" Nanomaterials 14, no. 19: 1549. https://doi.org/10.3390/nano14191549
APA StyleYang, S., Larionova, T., Kobykhno, I., Klinkov, V., Shalnova, S., & Tolochko, O. (2024). Graphene-Doped Thermoplastic Polyurethane Nanocomposite Film-Based Triboelectric Nanogenerator for Self-Powered Sport Sensor. Nanomaterials, 14(19), 1549. https://doi.org/10.3390/nano14191549