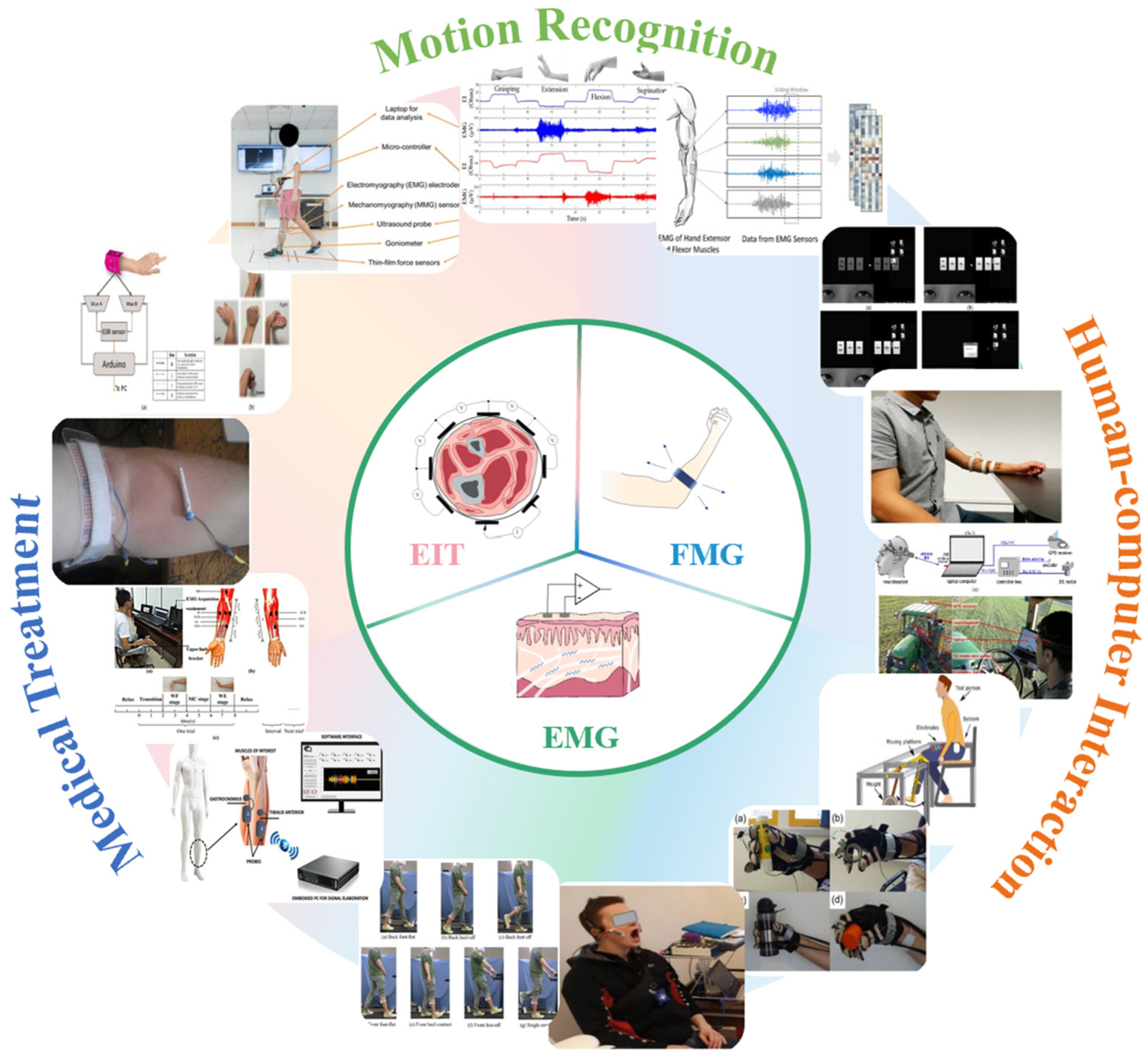
A Review of EMG-, FMG-, and EIT-Based Biosensors and Relevant Human–Machine Interactivities and Biomedical Applications



Abstract
:1. Introduction
2. Principle
2.1. FMG
2.2. EMG
2.3. EIT
3. Data Acquisition
3.1. FMG Signal Acquisition
3.1.1. Piezoresistive Sensors
3.1.2. Capacitive Sensors
3.1.3. Piezoelectric Sensors
3.1.4. Other Sensors
3.1.5. Sampling Frequency and Channels
3.2. EMG Signal Acquisition
3.2.1. Acquisition Method
3.2.2. Electrode Profile
3.2.3. Sampling Frequency and Channels
3.3. EIT Signal Acquisition
3.3.1. Electrodes
3.3.2. Drive Pattern
4. Data Processing
4.1. Data Preprocessing
4.1.1. Filter and Amplification
4.1.2. Other Preprocessing
4.2. Feature Extraction
4.2.1. Features of FMG and EMG
4.2.2. Feature of EIT
4.3. Interpretation Algorithms
4.3.1. Early Algorithms
4.3.2. Machine Learning
5. Application
5.1. Human–Machine Interaction
5.1.1. FMG in HMI
5.1.2. EMG in HMI
5.1.3. EIT in HMI
5.2. Medical and Healthcare
5.2.1. FMG in Medical and Healthcare
5.2.2. Medical and Clinical Application of EMG
5.2.3. Clinical Application of EIT
6. Summary and Comparison of the Three Techniques
6.1. FMG
6.2. EMG
6.3. EIT
7. Challenge
7.1. FMG
7.2. EMG
7.3. EIT
8. Outlook
8.1. Complementation and Calibration
8.2. Broaden Application Scenarios
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Choromański, W.; Grabarek, I.; Kozłowski, M. Integrated Design of a Custom Steering System in Cars and Verification of Its Correct Functioning. Energies 2021, 14, 6740. [Google Scholar] [CrossRef]
- Fujiwara, E.; Suzuki, C.K. Optical fiber force myography sensor for identification of hand postures. J. Sens. 2018, 2018, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Harrison, C. Tomo: Wearable, low-cost electrical impedance tomography for hand gesture recognition. In Proceedings of the 28th Annual ACM Symposium on User Interface Software & Technology; Association for Computing Machinery: New York, NY, USA, 2015; pp. 167–173. [Google Scholar]
- Qi, J.; Jiang, G.; Li, G.; Sun, Y.; Tao, B. Intelligent human-computer interaction based on surface EMG gesture recognition. IEEE Access 2019, 7, 61378–61387. [Google Scholar] [CrossRef]
- Ke, A.; Huang, J.; Chen, L.; Gao, Z.; He, J. An Ultra-Sensitive Modular Hybrid EMG–FMG Sensor with Floating Electrodes. Sensors 2020, 20, 4775. [Google Scholar] [CrossRef] [PubMed]
- Pasquina, P.F.; Evangelista, M.; Carvalho, A.J.; Lockhart, J.; Griffin, S.; Nanos, G.; McKay, P.; Hansen, M.; Ipsen, D.; Vandersea, J.; et al. First-in-man demonstration of a fully implanted myoelectric sensors system to control an advanced electromechanical prosthetic hand. J. Neurosci. Methods 2015, 244, 85–93. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, N.; Yang, D.; Jiang, L.; Liu, H.; Cai, H. Combined use of FSR sensor array and SVM classifier for finger motion recognition based on pressure distribution map. J. Bionic Eng. 2012, 9, 39–47. [Google Scholar] [CrossRef]
- Jiang, S.; Gao, Q.; Liu, H.; Shull, P.B. A novel, co-located EMG-FMG-sensing wearable armband for hand gesture recognition. Sens. Actuators A Phys. 2020, 301, 111738. [Google Scholar] [CrossRef]
- Xiao, Z.G.; Menon, C. A review of force myography research and development. Sensors 2019, 19, 4557. [Google Scholar] [CrossRef] [Green Version]
- Jiang, X.; Merhi, L.-K.; Xiao, Z.G.; Menon, C. Exploration of force myography and surface electromyography in hand gesture classification. Med. Eng. Phys. 2017, 41, 63–73. [Google Scholar] [CrossRef]
- Islam, M.R.U.; Waris, A.; Kamavuako, E.N.; Bai, S. A comparative study of motion detection with FMG and sEMG methods for assistive applications. J. Rehabil. Assist. Technol. Eng. 2020, 7, 2055668320938588. [Google Scholar] [CrossRef]
- Zakia, U.; Menon, C. Estimating exerted hand force via force myography to interact with a biaxial stage in real-time by learning human intentions: A preliminary investigation. Sensors 2020, 20, 2104. [Google Scholar] [CrossRef] [Green Version]
- Joseph Vedhagiri, G.P.; Wang, X.Z.; Senthil Kumar, K.; Ren, H. Comparative Study of Machine Learning Algorithms to Classify Hand Gestures from Deployable and Breathable Kirigami-Based Electrical Impedance Bracelet. Multimodal Technol. Interact. 2020, 4, 47. [Google Scholar] [CrossRef]
- Kong, D.; Wang, W.; Guo, D.; Shi, Y. RBF Sliding Mode Control Method for an Upper Limb Rehabilitation Exoskeleton Based on Intent Recognition. Appl. Sci. 2022, 12, 4993. [Google Scholar] [CrossRef]
- Li, L.; Stampas, A.; Shin, H.; Li, X.; Zhou, P. Alterations in localized electrical impedance myography of biceps brachii muscles paralyzed by spinal cord injury. Front. Neurol. 2017, 8, 253. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Anvaripour, M.; Khoshnam, M.; Menon, C.; Saif, M. FMG-and RNN-Based Estimation of Motor Intention of Upper-Limb Motion in Human-Robot Collaboration. Front. Robot. AI 2020, 7, 573096. [Google Scholar] [CrossRef] [PubMed]
- Prakash, A.; Sahi, A.K.; Sharma, N.; Sharma, S. Force myography controlled multifunctional hand prosthesis for upper-limb amputees. Biomed. Signal Process. Control 2020, 62, 102122. [Google Scholar] [CrossRef]
- Wininger, M.; Kim, N.-H.; Craelius, W. Pressure signature of forearm as predictor of grip force. J. Rehabil. Res. Dev. 2008, 45, 883–892. [Google Scholar] [CrossRef]
- Nazmi, N.; Abdul Rahman, M.A.; Yamamoto, S.-I.; Ahmad, S.A.; Zamzuri, H.; Mazlan, S.A. A review of classification techniques of EMG signals during isotonic and isometric contractions. Sensors 2016, 16, 1304. [Google Scholar] [CrossRef] [Green Version]
- Chowdhury, R.H.; Reaz, M.B.; Ali, M.A.B.M.; Bakar, A.A.; Chellappan, K.; Chang, T.G. Surface electromyography signal processing and classification techniques. Sensors 2013, 13, 12431–12466. [Google Scholar] [CrossRef]
- Reaz, M.B.I.; Hussain, M.S.; Mohd-Yasin, F. Techniques of EMG signal analysis: Detection, processing, classification and applications. Biol. Proced. Online 2006, 8, 11–35. [Google Scholar] [CrossRef] [Green Version]
- Ferigo, D.; Merhi, L.-K.; Pousett, B.; Xiao, Z.G.; Menon, C. A case study of a force-myography controlled bionic hand mitigating limb position effect. J. Bionic Eng. 2017, 14, 692–705. [Google Scholar] [CrossRef]
- Truong, H.; Zhang, S.; Muncuk, U.; Nguyen, P.; Bui, N.; Nguyen, A.; Lv, Q.; Chowdhury, K.; Dinh, T.; Vu, T. Capband: Battery-free successive capacitance sensing wristband for hand gesture recognition. In Proceedings of the 16th ACM Conference on Embedded Networked Sensor Systems, 4–7 November 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 54–67. [Google Scholar]
- Li, X.; Zhuo, Q.; Zhang, X.; Samuel, O.W.; Xia, Z.; Zhang, X.; Fang, P.; Li, G. FMG-based body motion registration using piezoelectret sensors. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 4626–4629. [Google Scholar]
- Wu, Y.T.; Gomes, M.K.; da Silva, W.H.; Lazari, P.M.; Fujiwara, E. Integrated optical fiber force myography sensor as pervasive predictor of hand postures. Biomed. Eng. Comput. Biol. 2020, 11, 1179597220912825. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abboudi, R.L.; Glass, C.A.; Newby, N.A.; Flint, J.A.; Craelius, W. A biomimetic controller for a multifinger prosthesis. IEEE Trans. Rehabil. Eng. 1999, 7, 121–129. [Google Scholar] [CrossRef] [PubMed]
- Islam, M.R.U.; Bai, S. Effective Multi-Mode Grasping Assistance Control of a Soft Hand Exoskeleton Using Force Myography. Front. Robot. AI 2020, 7, 567491. [Google Scholar] [CrossRef] [PubMed]
- Jiang, X.; Chu, K.H.; Khoshnam, M.; Menon, C. A wearable gait phase detection system based on force myography techniques. Sensors 2018, 18, 1279. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Prakash, A.; Sharma, N.; Sharma, S. An affordable transradial prosthesis based on force myography sensor. Sens. Actuators A Phys. 2021, 325, 112699. [Google Scholar] [CrossRef]
- Kumar, A.; Godiyal, A.K.; Joshi, P.; Joshi, D. A new force myography-based approach for continuous estimation of knee joint angle in lower limb amputees and able-bodied subjects. IEEE J. Biomed. Health Inform. 2020, 25, 701–710. [Google Scholar] [CrossRef]
- Ahmadizadeh, C.; Menon, C. Investigation of regression methods for reduction of errors caused by bending of FSR-based pressure sensing systems used for prosthetic applications. Sensors 2019, 19, 5519. [Google Scholar] [CrossRef] [Green Version]
- Interlink Technologies FSR 400 Series Data Sheet. Available online: https://www.interlinkelectronics.com/fsr-402 (accessed on 12 July 2021).
- Gao, S.; Dai, Y.; Nathan, A. Tactile and Vision Perception for Intelligent Humanoids. Adv. Intell. Syst. 2022, 4, 2100074. [Google Scholar] [CrossRef]
- Luo, Y.; Shao, J.; Chen, S.; Chen, X.; Tian, H.; Li, X.; Wang, L.; Wang, D.; Lu, B. Flexible capacitive pressure sensor enhanced by tilted micropillar arrays. ACS Appl. Mater. Interfaces 2019, 11, 17796–17803. [Google Scholar] [CrossRef]
- Lei, K.F.; Lee, K.-F.; Lee, M.-Y. Development of a flexible PDMS capacitive pressure sensor for plantar pressure measurement. Microelectron. Eng. 2012, 99, 1–5. [Google Scholar] [CrossRef]
- Maddipatla, D.; Zhang, X.; Bose, A.; Masihi, S.; Panahi, M.; Palaniappan, V.; Narakathu, B.; Bazuin, B.; Atashbar, M. Development of a flexible force sensor using additive print manufacturing process. In Proceedings of the 2019 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS), Glasgow, UK, 8–10 July 2019; pp. 1–3. [Google Scholar]
- Chuang, C.-H.; Dong, W.-B.; Lo, W.-B. Flexible piezoelectric tactile sensor with structural electrodes array for shape recognition system. In Proceedings of the 2008 3rd International Conference on Sensing Technology, Taipei, Taiwan, China, 30 November–3 December 2008; pp. 504–507. [Google Scholar]
- Berthold, J.W. Historical review of microbend fiber-optic sensors. J. Lightwave Technol. 1995, 13, 1193–1199. [Google Scholar] [CrossRef]
- Lei, G.; Zhang, S.; Fang, Y.; Wang, Y.; Zhang, X. Investigation on the Sampling Frequency and Channel Number for Force Myography Based Hand Gesture Recognition. Sensors 2021, 21, 3872. [Google Scholar] [CrossRef] [PubMed]
- Xiong, Y.; Quek, F. Hand motion gesture frequency properties and multimodal discourse analysis. Int. J. Comput. Vis. 2006, 69, 353–371. [Google Scholar] [CrossRef] [Green Version]
- Xiao, Z.G.; Menon, C. An investigation on the sampling frequency of the upper-limb force myographic signals. Sensors 2019, 19, 2432. [Google Scholar] [CrossRef] [Green Version]
- Sakr, M.; Jiang, X.; Menon, C. Estimation of user-applied isometric force/torque using upper extremity force myography. Front. Robot. AI 2019, 6, 120. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Wang, Y.L.; Xia, Y.; Zhang, P.F.; Kirk, T.V.; Chen, X.D. Textile-only capacitive sensors for facile fabric integration without compromise of wearability. Adv. Mater. Technol. 2019, 4, 1900485. [Google Scholar] [CrossRef]
- Peng, Q.; Xianmin, Q.; Yulong, B.; Yang, L.; Xinxin, W.; Mei, Z. Design and Experimental Research on Flexible Capacitive Tactile Sensor Based on Micro-Electro-Mechanical-System. In Proceedings of the 2021 International Conference on Intelligent Computing, Automation and Systems (ICICAS), Chongqing, China, 29–31 December 2021; pp. 80–83. [Google Scholar]
- Fang, P.; Ma, X.; Li, X.; Qiu, X.; Gerhard, R.; Zhang, X.; Li, G. Fabrication, structure characterization, and performance testing of piezoelectret-film sensors for recording body motion. IEEE Sens. J. 2017, 18, 401–412. [Google Scholar] [CrossRef]
- Chu, K.H.; Jiang, X.; Menon, C. Wearable step counting using a force myography-based ankle strap. J. Rehabil. Assist. Technol. Eng. 2017, 4, 2055668317746307. [Google Scholar] [CrossRef] [Green Version]
- Ribas Neto, A.; Fajardo, J.; da Silva, W.H.A.; Gomes, M.K.; de Castro, M.C.F.; Fujiwara, E.; Rohmer, E. Design of Tendon-Actuated Robotic Glove Integrated with Optical Fiber Force Myography Sensor. Automation 2021, 2, 187–201. [Google Scholar] [CrossRef]
- Wu, Y.T.; Fujiwara, E.; Suzuki, C.K. Evaluation of optical myography sensor as predictor of hand postures. IEEE Sens. J. 2019, 19, 5299–5306. [Google Scholar] [CrossRef]
- Farina, D.; Negro, F. Accessing the neural drive to muscle and translation to neurorehabilitation technologies. IEEE Rev. Biomed. Eng. 2012, 5, 3–14. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Kim, M.-O.; Kang, T.; Park, J.; Choi, Y. Knit band sensor for myoelectric control of surface EMG-based prosthetic hand. IEEE Sens. J. 2018, 18, 8578–8586. [Google Scholar] [CrossRef]
- Pino, E.J.; Arias, Y.; Aqueveque, P. Wearable EMG shirt for upper limb training. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Hilton Hawaiian Village Waikiki Beach Resort, Honolulu, HI, USA, 18–21 July 2018; pp. 4406–4409. [Google Scholar]
- Acar, G.; Ozturk, O.; Golparvar, A.J.; Elboshra, T.A.; Böhringer, K.; Yapici, M.K. Wearable and flexible textile electrodes for biopotential signal monitoring: A review. Electronics 2019, 8, 479. [Google Scholar] [CrossRef] [Green Version]
- Chi, Y.M.; Jung, T.-P.; Cauwenberghs, G. Dry-contact and noncontact biopotential electrodes: Methodological review. IEEE Rev. Biomed. Eng. 2010, 3, 106–119. [Google Scholar] [CrossRef] [Green Version]
- Carr, J.J.; Brown, J.M. Introduction to Biomedical Equipment Technology; Prentice Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Fleury, A.; Alizadeh, M.; Stefan, G.; Chau, T. Toward fabric-based EEG access technologies: Seamless knit electrodes for a portable brain-computer interface. In Proceedings of the 2017 IEEE Life Sciences Conference (LSC), Sydney, NSW, Australia, 13–15 December 2017; pp. 35–38. [Google Scholar]
- Albulbul, A. Evaluating major electrode types for idle biological signal measurements for modern medical technology. Bioengineering 2016, 3, 20. [Google Scholar] [CrossRef] [Green Version]
- Amma, C.; Krings, T.; Böer, J.; Schultz, T. Advancing muscle-computer interfaces with high-density electromyography. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, 18 April 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 929–938. [Google Scholar]
- Casale, R.; Rainoldi, A. Fatigue and fibromyalgia syndrome: Clinical and neurophysiologic pattern. Best Pract. Res. Clin. Rheumatol. 2011, 25, 241–247. [Google Scholar] [CrossRef]
- Du, Y.; Jin, W.; Wei, W.; Hu, Y.; Geng, W. Surface EMG-based inter-session gesture recognition enhanced by deep domain adaptation. Sensors 2017, 17, 458. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Yang, L.; Liao, H.; Liang, B.; Ye, X. Ankle foot motion recognition based on wireless wearable sEMG and acceleration sensors for smart AFO. Sens. Actuators A: Phys. 2021, 331, 113025. [Google Scholar] [CrossRef]
- Muceli, S.; Farina, D. Simultaneous and proportional estimation of hand kinematics from EMG during mirrored movements at multiple degrees-of-freedom. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 20, 371–378. [Google Scholar] [CrossRef]
- Kanoga, S.; Hoshino, T.; Asoh, H. Semi-supervised style transfer mapping-based framework for sEMG-based pattern recognition with 1-or 2-DoF forearm motions. Biomed. Signal Process. Control 2021, 68, 102817. [Google Scholar] [CrossRef]
- Junior, J.J.A.M.; Freitas, M.L.; Siqueira, H.V.; Lazzaretti, A.E.; Pichorim, S.F.; Stevan, S.L., Jr. Feature selection and dimensionality reduction: An extensive comparison in hand gesture classification by sEMG in eight channels armband approach. Biomed. Signal Process. Control 2020, 59, 101920. [Google Scholar] [CrossRef]
- Yao, J.; Chen, H.; Xu, Z.; Huang, J.; Li, J.; Jia, J.; Wu, H. Development of a wearable electrical impedance tomographic sensor for gesture recognition with machine learning. IEEE J. Biomed. Health Inform. 2019, 24, 1550–1556. [Google Scholar] [CrossRef] [PubMed]
- Tang, M.; Wang, W.; Wheeler, J.; McCormick, M.; Dong, X. The number of electrodes and basis functions in EIT image reconstruction. Physiol. Meas. 2002, 23, 129. [Google Scholar] [CrossRef] [PubMed]
- Tawil, D.S.; Rye, D.; Velonaki, M. Improved image reconstruction for an EIT-based sensitive skin with multiple internal electrodes. IEEE Trans. Robot. 2011, 27, 425–435. [Google Scholar] [CrossRef]
- Wang, Y.; Ren, C.; Zhao, S.; Wang, L.; Sha, H. Simulation Study of Electrode System Optimization in Electrical Impedance Tomography. In Proceedings of the 2010 4th International Conference on Bioinformatics and Biomedical Engineering, Chengdu, China, 18–20 June 2010; pp. 1–4. [Google Scholar]
- Orschulik, J.; Menden, T. Optimizing the Measurement Frequency in Electrical Impedance Tomography. In Proceedings of the 21st International Student Conference on Electrical Engineering, Prague, Czech Republic, 22–24 May 2017. [Google Scholar]
- Brown, B.H.; Seagar, A.D. The Sheffield data collection system. Clin. Phys. Physiol. Meas. 1987, 8, 91. [Google Scholar] [CrossRef]
- Avis, N.J.; Barber, D.C. Image reconstruction using non-adjacent drive configurations (electric impedance tomography). Physiol. Meas. 1994, 15, A153. [Google Scholar] [CrossRef]
- Shi, X.; Dong, X.; Shuai, W.; You, F.; Fu, F.; Liu, R. Pseudo-polar drive patterns for brain electrical impedance tomography. Physiol. Meas. 2006, 27, 1071–1080. [Google Scholar] [CrossRef]
- Smith, R.W.; Freeston, I.L.; Brown, B.H. A real-time electrical impedance tomography system for clinical use-design and preliminary results. IEEE Trans. Biomed. Eng. 1995, 42, 133–140. [Google Scholar] [CrossRef]
- Lu, X.; Sun, S.; Liu, K.; Sun, J.; Xu, L. Development of a Wearable Gesture Recognition System Based on Two-terminal Electrical Impedance Tomography. IEEE J. Biomed. Health Inform. 2022, 26, 2515–2523. [Google Scholar] [CrossRef]
- Veer, K. A technique for classification and decomposition of muscle signal for control of myoelectric prostheses based on wavelet statistical classifier. Measurement 2015, 60, 283–291. [Google Scholar] [CrossRef]
- Daud, W.M.B.W.; Yahya, A.B.; Horng, C.S.; Sulaima, M.F.; Sudirman, R. Features extraction of electromyography signals in time domain on biceps brachii muscle. Int. J. Model. Optim. 2013, 3, 515. [Google Scholar] [CrossRef] [Green Version]
- Baidillah, M.R.; Gao, Z.; Iman, A.-A.S.; Takei, M. Adaptive Noise Cancellation Algorithms Implemented onto FPGA-Based Electrical Impedance Tomography System. Electr. Sci. Eng. 2019, 1, 2. [Google Scholar] [CrossRef]
- Englehart, K.; Hudgins, B. A robust, real-time control scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2003, 50, 848–854. [Google Scholar] [CrossRef] [PubMed]
- Parajuli, N.; Sreenivasan, N.; Bifulco, P.; Cesarelli, M.; Savino, S.; Niola, V.; Esposito, D.; Hamilton, T.J.; Naik, G.R.; Gunawardana, U.; et al. Real-time EMG based pattern recognition control for hand prostheses: A review on existing methods, challenges and future implementation. Sensors 2019, 19, 4596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, D.; Yang, W.; Pan, M. Design of impedance measuring circuits based on phase-sensitive demodulation technique. IEEE Trans. Instrum. Meas. 2010, 60, 1276–1282. [Google Scholar] [CrossRef]
- Ge, K.; Lifeng, R. FPGA-based digital phase-sensitive demodulator for EIT system. In Proceedings of the 2007 8th International Conference on Electronic Measurement and Instruments, Xi’an, China, 16–18 August 2007; pp. 845–848. [Google Scholar]
- Fernandez, M.; Pallas-Areny, R. Ag-AgCl electrode noise in high-resolution ECG measurements. Biomed. Instrum. Technol. 2000, 34, 125–130. [Google Scholar]
- Xi, X.; Tang, M.; Miran, S.M.; Luo, Z. Evaluation of feature extraction and recognition for activity monitoring and fall detection based on wearable sEMG sensors. Sensors 2017, 17, 1229. [Google Scholar] [CrossRef]
- Mendez, I.; Hansen, B.W.; Grabow, C.M.; Smedegaard, E.J.L.; Skogberg, N.B.; Uth, X.J.; Bruhn, A.; Geng, B.; Kamavuako, E.N. Evaluation of the Myo armband for the classification of hand motions. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1211–1214. [Google Scholar]
- Côté-Allard, U.; Fall, C.L.; Campeau-Lecours, A.; Gosselin, C.; Laviolette, F.; Gosselin, B. Transfer learning for sEMG hand gestures recognition using convolutional neural networks. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 1663–1668. [Google Scholar]
- Toledo-Pérez, D.C.; Martínez-Prado, M.A.; Gómez-Loenzo, R.A.; Paredes-García, W.J.; Rodríguez-Reséndiz, J. A study of movement classification of the lower limb based on up to 4-EMG channels. Electronics 2019, 8, 259. [Google Scholar] [CrossRef] [Green Version]
- Hudgins, B.; Parker, P.; Scott, R.N. A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef]
- Toledo-Pérez, D.C.; Rodríguez-Reséndiz, J.; Gómez-Loenzo, R.A.; Jauregui-Correa, J.C. Support vector machine-based EMG signal classification techniques: A review. Appl. Sci. 2019, 9, 4402. [Google Scholar] [CrossRef] [Green Version]
- Ma, G.; Hao, Z.; Wu, X.; Wang, X. An optimal electrical impedance tomography drive pattern for human-computer interaction applications. IEEE Trans. Biomed. Circuits Syst. 2020, 14, 402–411. [Google Scholar] [CrossRef] [PubMed]
- Curcie, D.J.; Flint, J.A.; Craelius, W. Biomimetic finger control by filtering of distributed forelimb pressures. IEEE Trans. Neural Syst. Rehabil. Eng. 2001, 9, 69–75. [Google Scholar] [CrossRef] [PubMed]
- Raphisak, P.; Schuckers, S.; de Jongh Curry, A. An algorithm for EMG noise detection in large ECG data. In Proceedings of the Computers in Cardiology, Chicago, IL, USA, 19–22 September 2004; pp. 369–372. [Google Scholar]
- Kilner, J.M.; Baker, S.; Lemon, R.N. A novel algorithm to remove electrical cross-talk between surface EMG recordings and its application to the measurement of short-term synchronisation in humans. J. Physiol. 2002, 538, 919–930. [Google Scholar] [CrossRef]
- Jiang, X.; Xiao, Z.G.; Menon, C. Virtual grasps recognition using fusion of Leap Motion and force myography. Virtual Real. 2018, 22, 297–308. [Google Scholar] [CrossRef]
- Xiao, Z.G.; Menon, C. Performance of forearm FMG and sEMG for estimating elbow, forearm and wrist positions. J. Bionic Eng. 2017, 14, 284–295. [Google Scholar] [CrossRef]
- Godiyal, A.K.; Mondal, M.; Joshi, S.D.; Joshi, D. Force myography based novel strategy for locomotion classification. IEEE Trans. Hum. Mach. Syst. IEEE 2018, 48, 648–657. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, Y.; Yao, F.; Xu, L.; Shang, P.; Li, G. An adaptation strategy of using LDA classifier for EMG pattern recognition. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 4267–4270. [Google Scholar]
- Huang, S.-W.; Rohde, G.K.; Cheng, H.-M.; Lin, S.-F. Discretized target size detection in electrical impedance tomography using neural network classifier. J. Nondestruct. Eval. 2020, 39, 1–9. [Google Scholar] [CrossRef]
- Wang, X.; Zhong, Y. Statistical learning theory and state of the art in SVM. In Proceedings of the Second IEEE International Conference on Cognitive Informatics, London, UK, 20–20 August 2003; pp. 55–59. [Google Scholar]
- Subasi, A. Classification of EMG signals using PSO optimized SVM for diagnosis of neuromuscular disorders. Comput. Biol. Med. 2013, 43, 576–586. [Google Scholar] [CrossRef]
- Ha, N.; Withanachchi, G.P.; Yihun, Y. Performance of forearm FMG for estimating hand gestures and prosthetic hand control. J. Bionic Eng. 2019, 16, 88–98. [Google Scholar] [CrossRef]
- Zakia, U.; Jiang, X.; Menon, C. Deep learning technique in recognizing hand grasps using FMG signals. In Proceedings of the 2020 11th IEEE Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 4–7 November 2020; pp. 0546–0552. [Google Scholar]
- Belyea, A.; Englehart, K.; Scheme, E. FMG Versus EMG: A comparison of usability for real-time pattern recognition based control. IEEE Trans. Biomed. Eng. 2019, 66, 3098–3104. [Google Scholar] [CrossRef] [PubMed]
- McDermott, B.; O’Halloran, M.; Porter, E.; Santorelli, A. Brain haemorrhage detection using a SVM classifier with electrical impedance tomography measurement frames. PLoS ONE 2018, 13, e0200469. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alkan, A.; Günay, M. Identification of EMG signals using discriminant analysis and SVM classifier. Expert Syst. Appl. 2012, 39, 44–47. [Google Scholar] [CrossRef]
- Abiodun, O.I.; Jantan, A.; Omolara, A.E.; Dada, K.V.; Mohamed, N.A.; Arshad, H. State-of-the-art in artificial neural network applications: A survey. Heliyon 2018, 4, e00938. [Google Scholar] [CrossRef] [Green Version]
- Yap, H.K.; Mao, A.; Goh, J.C.; Yeow, C.-H. Design of a wearable FMG sensing system for user intent detection during hand rehabilitation with a soft robotic glove. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 781–786. [Google Scholar]
- Ahsan, M.R.; Ibrahimy, M.I.; Khalifa, O.O. Hand motion detection from EMG signals by using ANN based classifier for human computer interaction. In Proceedings of the 2011 Fourth International Conference on Modeling, Simulation and Applied Optimization, Kuala Lumpur, Malaysia, 19–21 April 2011; pp. 1–6. [Google Scholar]
- Chegani, R.S.; Menon, C. Pilot study on fine finger movement regression, using FMG. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 1069–1074. [Google Scholar]
- Al-Faiz, M.Z.; Ali, A.A.; Miry, A.H. A k-nearest neighbor based algorithm for human arm movements recognition using EMG signals. In Proceedings of the 2010 1st International Conference on Energy, Power and Control (EPC-IQ), Basrah, Iraq, 30 November–2 December 2010; pp. 159–167. [Google Scholar]
- Briko, A.; Kapravchuk, V.; Kobelev, A.; Hammoud, A.; Leonhardt, S.; Ngo, C.; Gulyaev, Y.; Shchukin, S. A Way of Bionic Control Based on EI, EMG, and FMG Signals. Sensors 2021, 22, 152. [Google Scholar] [CrossRef]
- Gopal, P.; Gesta, A.; Mohebbi, A. A Systematic Study on Electromyography-Based Hand Gesture Recognition for Assistive Robots Using Deep Learning and Machine Learning Models. Sensors 2022, 22, 3650. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.-J.; Gang, G.W.; Kim, T.S. Development of EOG-based human computer interface (HCI) system using piecewise linear approximation (PLA) and support vector regression (SVR). Electronics 2018, 7, 38. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.; Zhang, X.; Zhao, Y.; Zhang, Y.; Zhong, X.; Fan, Z. A novel feature optimization for wearable human-computer interfaces using surface electromyography sensors. Sensors 2018, 18, 869. [Google Scholar] [CrossRef] [Green Version]
- Gomez-Gil, J.; San-Jose-Gonzalez, I.; Nicolas-Alonso, L.F.; Alonso-Garcia, S. Steering a tractor by means of an EMG-based human-machine interface. Sensors 2011, 11, 7110–7126. [Google Scholar] [CrossRef] [Green Version]
- Ngo, C.; Munoz, C.; Lueken, M.; Hülkenberg, A.; Bollheimer, C.; Briko, A.; Kobelev, A.; Shchukin, S.; Leonhardt, S. A Wearable, Multi-Frequency Device to Measure Muscle Activity Combining Simultaneous Electromyography and Electrical Impedance Myography. Sensors 2022, 22, 1941. [Google Scholar] [CrossRef]
- Kulesa-Mrowiecka, M.; Barański, R.; Kłaczyński, M. sEMG and Vibration System Monitoring for Differential Diagnosis in Temporomandibular Joint Disorders. Sensors 2022, 22, 3811. [Google Scholar] [CrossRef] [PubMed]
- Miyake, T.; Yamamoto, S.; Hosono, S.; Funabashi, S.; Cheng, Z.; Zhang, C.; Tamaki, E.; Sugano, S. Gait Phase Detection Based on Muscle Deformation with Static Standing-Based Calibration. Sensors 2021, 21, 1081. [Google Scholar] [CrossRef] [PubMed]
- Leone, A.; Rescio, G.; Manni, A.; Siciliano, P.; Caroppo, A. Comparative analysis of supervised classifiers for the evaluation of sarcopenia using a sEMG-based platform. Sensors 2022, 22, 2721. [Google Scholar] [CrossRef] [PubMed]
- Xie, P.; Chang, Q.; Zhang, Y.; Dong, X.; Yu, J.; Chen, X. Estimation of Time-Frequency Muscle Synergy in Wrist Movements. Entropy 2022, 24, 707. [Google Scholar] [CrossRef] [PubMed]
- Kudashov, I.; Shchukin, S.; Al-Harosh, M.; Shcherbachev, A. Smart Bio-Impedance-Based Sensor for Guiding Standard Needle Insertion. Sensors 2022, 22, 665. [Google Scholar] [CrossRef]
- Lyu, P.-Z.; Zhu, R.T.-L.; Ling, Y.T.; Wang, L.-K.; Zheng, Y.-P.; Ma, C.Z.-H. How Paretic and Non-Paretic Ankle Muscles Contract during Walking in Stroke Survivors: New Insight Using Novel Wearable Ultrasound Imaging and Sensing Technology. Biosensors 2022, 12, 349. [Google Scholar] [CrossRef]
- Lucaccini, L.F.; Kaiser, P.K.; Lyman, J. The French electric hand: Some observations and conclusions. Bull. Prosthet. Res. 1966, 10, 31–51. [Google Scholar]
- Belbasis, A.; Fuss, F.K. Muscle performance investigated with a novel smart compression garment based on pressure sensor force myography and its validation against EMG. Front. Physiol. 2018, 9, 408. [Google Scholar] [CrossRef] [Green Version]
- Lukowicz, P.; Hanser, F.; Szubski, C.; Schobersberger, W. Detecting and interpreting muscle activity with wearable force sensors. In Lecture Notes in Computer Science, Proceedings of the International Conference on Pervasive Computing, May 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 101–116. [Google Scholar]
- Ogris, G.; Kreil, M.; Lukowicz, P. Using FSR based muscule activity monitoring to recognize manipulative arm gestures. In Proceedings of the 2007 11th IEEE International Symposium on Wearable Computers, Boston, MA, USA, 11–13 October 2007; pp. 45–48. [Google Scholar]
- Ferrone, A.; Jiang, X.; Maiolo, L.; Pecora, A.; Colace, L.; Menon, C. A fabric-based wearable band for hand gesture recognition based on filament strain sensors: A preliminary investigation. In Proceedings of the 2016 IEEE Healthcare Innovation Point-Of-Care Technologies Conference (HI-POCT), Cancun, Mexico, 9–11 November 2016; pp. 113–116. [Google Scholar]
- Wei, L.; Hu, H. EMG and visual based HMI for hands-free control of an intelligent wheelchair. In Proceedings of the 2010 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 1027–1032. [Google Scholar]
- Dwivedi, A.; Kwon, Y.; McDaid, A.J.; Liarokapis, M. A learning scheme for EMG based decoding of dexterous, in-hand manipulation motions. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 2205–2215. [Google Scholar] [CrossRef]
- Sakib, N.; Islam, M.K. Design and implementation of an EMG controlled 3D printed prosthetic arm. In Proceedings of the 2019 IEEE International Conference on Biomedical Engineering, Computer and Information Technology for Health (BECITHCON), Dhaka, Bangladesh, 28–30 November 2019; pp. 85–88. [Google Scholar]
- Russo, S.; Assaf, R.; Carbonaro, N.; Tognetti, A. Touch position detection in electrical tomography tactile sensors through quadratic classifier. IEEE Sens. J. 2018, 19, 474–483. [Google Scholar] [CrossRef]
- Jiang, D.; Wu, Y.; Demosthenous, A. Hand gesture recognition using three-dimensional electrical impedance tomography. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 1554–1558. [Google Scholar] [CrossRef]
- Ahmadizadeh, C.; Pousett, B.; Menon, C. Investigation of channel selection for gesture classification for prosthesis control using force myography: A case study. Front. Bioeng. Biotechnol. 2019, 7, 331. [Google Scholar] [CrossRef] [PubMed]
- Kuo, C.-H.; Chen, J.-W.; Yang, Y.; Lan, Y.-H.; Lu, S.-W.; Wang, C.-F.; Lo, Y.-C.; Lin, C.-L.; Lin, S.-H.; Chen, P.-C.; et al. A Differentiable Dynamic Model for Musculoskeletal Simulation and Exoskeleton Control. Biosensors 2022, 12, 312. [Google Scholar] [CrossRef] [PubMed]
- Pérez-Reynoso, F.; Farrera-Vazquez, N.; Capetillo, C.; Méndez-Lozano, N.; González-Gutiérrez, C.; López-Neri, E. Pattern Recognition of EMG Signals by Machine Learning for the Control of a Manipulator Robot. Sensors 2022, 22, 3424. [Google Scholar] [CrossRef]
- Wu, C.; Zeng, H.; Song, A.; Xu, B. Grip force and 3D push-pull force estimation based on sEMG and GRNN. Front. Neurosci. 2017, 11, 343. [Google Scholar] [CrossRef] [Green Version]
- Copaci, D.; Serrano, D.; Moreno, L.; Blanco, D. A high-level control algorithm based on sEMG signalling for an elbow joint SMA exoskeleton. Sensors 2018, 18, 2522. [Google Scholar] [CrossRef] [Green Version]
- Sadeghi Chegani, R.; Menon, C. Regressing grasping using force myography: An exploratory study. Biomed. Eng. Online 2018, 17, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Belyea, A.T.; Englehart, K.B.; Scheme, E.J. A proportional control scheme for high density force myography. J. Neural Eng. 2018, 15, 046029. [Google Scholar] [CrossRef]
- Xia, P.; Hu, J.; Peng, Y. EMG-based estimation of limb movement using deep learning with recurrent convolutional neural networks. Artif. Organs 2018, 42, E67–E77. [Google Scholar] [CrossRef]
- Kim, J.-S.; Kim, M.-G.; Pan, S.-B. Two-Step Biometrics Using Electromyogram Signal Based on Convolutional Neural Network-Long Short-Term Memory Networks. Appl. Sci. 2021, 11, 6824. [Google Scholar] [CrossRef]
- Ahmed, M.U.; Chanwimalueang, T.; Thayyil, S.; Mandic, D.P. A multivariate multiscale fuzzy entropy algorithm with application to uterine EMG complexity analysis. Entropy 2016, 19, 2. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Xiao, R.; Harrison, C. Advancing hand gesture recognition with high resolution electrical impedance tomography. In Proceedings of the 29th Annual Symposium on User Interface Software and Technology, 16 October 2016; Association for Computing Machinery: New York, NY, USA, 2016; pp. 843–850. [Google Scholar]
- Atitallah, B.B.; Hu, Z.; Bouchaala, D.; Hussain, M.A.; Ismail, A.; Derbel, N.; Kanoun, O. Hand Sign Recognition System Based on EIT Imaging and Robust CNN Classification. IEEE Sens. J. 2021, 22, 1729–1737. [Google Scholar] [CrossRef]
- Palumbo, A.; Vizza, P.; Calabrese, B.; Ielpo, N. Biopotential signal monitoring systems in rehabilitation: A review. Sensors 2021, 21, 7172. [Google Scholar] [CrossRef] [PubMed]
- Petrofsky, J.S.; Glaser, R.M.; Phillips, C.A.; Lind, A.R.; Williams, C. Evaluation of the amplitude and frequency components of the surface EMG as an index of muscle fatigue. Ergonomics 1982, 25, 213–223. [Google Scholar] [CrossRef]
- Buchner, H.; Petersen, E.; Eger, M.; Rostalski, P. Convolutive blind source separation on surface EMG signals for respiratory diagnostics and medical ventilation control. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 3626–3629. [Google Scholar]
- Belfatto, A.; Scano, A.; Chiavenna, A.; Mastropietro, A.; Mrakic-Sposta, S.; Pittaccio, S.; Molinari Tosatti, L.; Molteni, F.; Rizzo, G. A multiparameter approach to evaluate post-stroke patients: An application on robotic rehabilitation. Appl. Sci. 2018, 8, 2248. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Sun, Y. NCMB-button: A wearable non-contact system for long-term multiple biopotential monitoring. In Proceedings of the 2017 IEEE/ACM International Conference on Connected Health: Applications, Systems and Engineering Technologies (CHASE), Philadelphia, PA, USA, 17–19 July 2017; pp. 348–355. [Google Scholar]
- Zhao, S.; Liu, J.; Gong, Z.; Lei, Y.; OuYang, X.; Chan, C.C.; Ruan, S. Wearable physiological monitoring system based on electrocardiography and electromyography for upper limb rehabilitation training. Sensors 2020, 20, 4861. [Google Scholar] [CrossRef]
- Henderson, R.P.; Webster, J.G. An impedance camera for spatially specific measurements of the thorax. IEEE Trans. Biomed. Eng. 1978, BME-25, 250–254. [Google Scholar] [CrossRef]
- Barber, D.C.; Brown, B.H.; Freeston, I.L. Imaging spatial distributions of resistivity using applied potential tomography—APT. In Information Processing in Medical Imaging; Springer: Dordrecht, The Netherlands, 1984; pp. 446–462. [Google Scholar]
- Barber, D.C.; Brown, B.H. Applied potential tomography. J. Phys. E Sci. Instrum. 1984, 17, 723. [Google Scholar] [CrossRef]
- Hahn, G.; Sipinkova, I.; Baisch, F.; Hellige, G. Changes in the thoracic impedance distribution under different ventilatory conditions. Physiol. Meas. 1995, 16, A161. [Google Scholar] [CrossRef]
- Hinz, J.; Hahn, G.; Neumann, P.; Sydow, M.; Mohrenweiser, P.; Hellige, G.; Burchardi, H. End-expiratory lung impedance change enables bedside monitoring of end-expiratory lung volume change. Intensive Care Med. 2003, 29, 37–43. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, J.; Liu, D.; Du, J. CT image-guided electrical impedance tomography for medical imaging. IEEE Trans. Med. Imaging 2019, 39, 1822–1832. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Möller, K.; Steinmann, D.; Frerichs, I.; Guttmann, J. Evaluation of an electrical impedance tomography-based global inhomogeneity index for pulmonary ventilation distribution. Intensive Care Med. 2009, 35, 1900–1906. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Steinmann, D.; Frerichs, I.; Guttmann, J.; Möller, K. PEEP titration guided by ventilation homogeneity: A feasibility study using electrical impedance tomography. Crit. Care 2010, 14, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Franchineau, G.; Bréchot, N.; Lebreton, G.; Hekimian, G.; Nieszkowska, A.; Trouillet, J.-L.; Leprince, P.; Chastre, J.; Luyt, C.-E.; Combes, A.; et al. Bedside contribution of electrical impedance tomography to setting positive end-expiratory pressure for extracorporeal membrane oxygenation–treated patients with severe acute respiratory distress syndrome. Am. J. Respir. Crit. Care Med. 2017, 196, 447–457. [Google Scholar] [CrossRef]
- Hsu, C.-F.; Cheng, J.-S.; Lin, W.-C.; Ko, Y.-F.; Cheng, K.-S.; Lin, S.-H.; Chen, C.-W. Electrical impedance tomography monitoring in acute respiratory distress syndrome patients with mechanical ventilation during prolonged positive end-expiratory pressure adjustments. J. Formos. Med. Assoc. 2016, 115, 195–202. [Google Scholar] [CrossRef] [Green Version]
- Heines, S.J.; Strauch, U.; van de Poll, M.C.; Roekaerts, P.M.; Bergmans, D.C. Clinical implementation of electric impedance tomography in the treatment of ARDS: A single centre experience. J. Clin. Monit. Comput. 2019, 33, 291–300. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Frerichs, I.; Hinz, J.; Herrmann, P.; Weisser, G.; Hahn, G.; Quintel, M.; Hellige, G. Regional lung perfusion as determined by electrical impedance tomography in comparison with electron beam CT imaging. IEEE Trans. Med. Imaging 2002, 21, 646–652. [Google Scholar] [CrossRef] [PubMed]
- Fagerberg, A.; Söndergaard, S.; Karason, S.; Åneman, A. Electrical impedence tomography and heterogeneity of pulmonary perfusion and ventilation in porcine acute lung injury. Acta Anaesthesiol. Scand. 2009, 53, 1300–1309. [Google Scholar] [CrossRef]
- Costa, E.L.; Chaves, C.N.; Gomes, S.; Beraldo, M.A.; Volpe, M.S.; Tucci, M.R.; Schettino, I.A.; Bohm, S.H.; Carvalho, C.R.; Tanaka, H.; et al. Real-time detection of pneumothorax using electrical impedance tomography. Crit. Care Med. 2008, 36, 1230–1238. [Google Scholar] [CrossRef]
- Frerichs, I.; Schiffmann, H.; Hahn, G.; Hellige, G. Non-invasive radiation-free monitoring of regional lung ventilation in critically ill infants. Intensive Care Med. 2001, 27, 1385–1394. [Google Scholar] [CrossRef]
- Davies, P.; Yasin, S.; Gates, S.; Bird, D.; Silvestre, C. Clinical scenarios of the application of electrical impedance tomography in paediatric intensive care. Sci. Rep. 2019, 9, 1–8. [Google Scholar] [CrossRef]
- Tidswell, T.; Gibson, A.; Bayford, R.H.; Holder, D.S. Three-dimensional electrical impedance tomography of human brain activity. NeuroImage 2001, 13, 283–294. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ayati, S.B.; Bouazza-Marouf, K.; Kerr, D. In vitro localisation of intracranial haematoma using electrical impedance tomography semi-array. Med. Eng. Phys. 2015, 37, 34–41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Halter, R.J.; Hartov, A.; Poplack, S.P.; Wells, W.A.; Rosenkranz, K.M.; Barth, R.J.; Kaufman, P.A.; Paulsen, K.D. Real-time electrical impedance variations in women with and without breast cancer. IEEE Trans. Med. Imaging 2014, 34, 38–48. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Poni, R.; Neufeld, E.; Capstick, M.; Bodis, S.; Samaras, T.; Kuster, N. Feasibility of Temperature Control by Electrical Impedance Tomography in Hyperthermia. Cancers 2021, 13, 3297. [Google Scholar] [CrossRef]
- Sadarangani, G.P.; Jiang, X.; Simpson, L.A.; Eng, J.J.; Menon, C. Force myography for monitoring grasping in individuals with stroke with mild to moderate upper-extremity impairments: A preliminary investigation in a controlled environment. Front. Bioeng. Biotechnol. 2017, 5, 42. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, C.-L.; Cheng, I.-C.; Huang, C.-H.; Liao, Y.-T.; Lin, W.-C.; Tsai, K.-J.; Chi, C.-H.; Chen, C.-W.; Wu, C.-H.; Lin, I.-T.; et al. Dry Wearable Textile Electrodes for Portable Electrical Impedance Tomography. Sensors 2021, 21, 6789. [Google Scholar] [CrossRef]
- Esposito, D.; Centracchio, J.; Andreozzi, E.; Savino, S.; Gargiulo, G.D.; Naik, G.R.; Bifulco, P. Design of a 3D-Printed Hand Exoskeleton Based on Force-Myography Control for Assistance and Rehabilitation. Machines 2022, 10, 57. [Google Scholar] [CrossRef]
- Koiler, R.; Bakhshipour, E.; Glutting, J.; Lalime, A.; Kofa, D.; Getchell, N. Repurposing an EMG Biofeedback Device for Gait Rehabilitation: Development, Validity and Reliability. Int. J. Environ. Res. Public Health 2021, 18, 6460. [Google Scholar] [CrossRef]
- Li, L.; Hu, C.; Leung, K.W.C.; Tong, R.K.Y. Immediate Effects of Functional Electrical Stimulation-Assisted Cycling on the Paretic Muscles of Patients With Hemiparesis After Stroke: Evidence From Electrical Impedance Myography. Front. Aging Neurosci. 2022, 14, 880221. [Google Scholar] [CrossRef]
- Krauss, E.; van der Beck, D.; Schmalz, I.; Wilhelm, J.; Tello, S.; Dartsch, R.C.; Mahavadi, P.; Korfei, M.; Teschner, E.; Seeger, W.; et al. Evaluation of regional pulmonary ventilation in spontaneously breathing patients with idiopathic pulmonary fibrosis (IPF) employing electrical impedance tomography (EIT): A pilot study from the European IPF registry (eurIPFreg). J. Clin. Med. 2021, 10, 192. [Google Scholar] [CrossRef] [PubMed]
- Ibrahim, A.F.T.; Gannapathy, V.R.; Chong, L.W.; Isa, I.S.M. Analysis of Electromyography (EMG) Signal for Human Arm Muscle: A Review. In Advanced Computer and Communication Engineering Technology, 29 December 2015; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; Volume 362, pp. 567–575. [Google Scholar]
- De Luca, C.J.; Gilmore, L.D.; Kuznetsov, M.; Roy, S.H. Filtering the surface EMG signal: Movement artifact and baseline noise contamination. J. Biomech. 2010, 43, 1573–1579. [Google Scholar] [CrossRef] [PubMed]
- Roland, T. Motion artifact suppression for insulated EMG to control myoelectric prostheses. Sensors 2020, 20, 1031. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dai, Y.; Wang, J.; Gao, S. Advanced Electronics and Artificial Intelligence: Must-Have Technologies Toward Human Body Digital Twins. Adv. Intell. Syst. 2022, 2100263. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mechanism | Material | Measuring Range | Hysteresis | Advantage | Disadvantage |
|---|---|---|---|---|---|
Piezoresistive [27,28,29,30] | PSS film, PEI film, Acrylic, polyester | 0.2–20 N | 10% | Thin and flexible, simple and easy to integrate, convenient and affordable, widely application | High power consumption, high hysteresis, low sensitivity, and temperature drift |
Capacitive [23,34,35,36,43,44] | Silicon, PDMS, SiO2, PET, Au | 0–20 N | 7–35% | Low power consumption, simple structure, high resolution, high sensitivity | Sensitive to EMI noise, susceptible to heat and moisture |
Piezoelectric [24,45,46] | PP film, PVDF film, PET, PEN | 0.5–40 N | 3–5% | Light weight, stretch ability, strong sensitivity, low power consumption, suitable for dynamic application | Cannot measure static forces, susceptible to heating |
Optical [2,25,47,48] | PVC plates, graphite, silica multimode fiber | 0–10 N | 6.3–20% | Immune to EMI, low cost, smaller linear errors, lower delays | Complex architecture, high power consumption, low spatial resolution |
| Electrode | Materials | Means of Reducing Contact Impedance | Electrode–Skin Equivalent Model | Advantages | Disadvantages | Application Scenarios |
|---|---|---|---|---|---|---|
| Dry electrode | Gold-plated silk fabrics, such as silvered yarn [50], silvered nylon [51], etc. | Using Hydrogel membrane or saline moisturizing interface [52] | Complex (the coupling of other interference) [53] | Contactless. Simple measuring conditions. Little stimulation to human skin. Low cost. Suitable for long-term measurement | Difficult to attach to the skin. The accuracy of measurement is worse | Wearable devices for long-term use |
| Wet electrode | Metal mixtures, such as Ag/AgCl [54,55], aluminum, gold/gold chloride [56], etc. | Using a wet gel layer | Simple (Containing double-layer capacitors, parallel or series resistors) [53] | Easy to attach to human skin [53]. Simple structure. Suitable for short-term measurement | Performance decreases over time. Human skin will be stimulated | Clinical care. Short-term health monitoring |
| Domain | Parameter | Concrete Explanations | Abbreviation |
|---|---|---|---|
| TD | Average Amplitude Value | The average amplitude of the signal | AAV |
| Mean Absolute Value | / | MAV | |
| Simple Square Integral | signal energy | SSI | |
| Variance | / | VAR | |
| Zero-Crossing(s) | The number of times the signal waveform intersects the axis “0” | ZC(S) | |
| Slope Sign Changes | Change in the sign of the slope | SSC | |
| Waveform Length | / | WL | |
| Root Mean Square Value | / | RMS | |
| FD | Mean Frequency | / | MNF |
| Mean Power | / | MNP | |
| Peak Frequency | Maximum frequency | PKF | |
| Total Power | / | TTP | |
| Power Spectral Density | / | PSD | |
| Power Spectrum Ratio | / | PSR | |
| TFD | Wavelet Transform | / | WT |
| Wavelet Packet Transform | / | WPT | |
| Short-Time Fourier Transform | / | STFT |
| Method | Reference | Sensors Number | Sampling Frequency | Feature Extraction | Algorithm | Function | Performance |
|---|---|---|---|---|---|---|---|
| FMG | [136] | 16 | 15 Hz | MAV | LR, SVR, NNR, and RF LDA SVM | Predict the angle between index finger and thumb (θTI), the angle between middle finger and thumb (θTM) | A correlation of determination (R2) of 0.871 for θTI and 0.941 for θTM |
| [22] | 64 | 10 Hz | Mean absolute value slope | LDA | Distinguish 11 gestures in static and dynamic conditions | Accuracy over 99% in static conditions, and accuracy over 86% in dynamic conditions | |
| [137] | 384 | 15 Hz | MAC | SVM | Propose a proportional control method to classify six gestures | Classification accuracy of 83.4 ± 3.47% | |
| [27] | 12 | / | Mean absolute value slope | Threshold-based classification method | Detect six hand motions intention and estimate grasping force | Average accuracy of 98 ± 1.3% on six subjects, implement a proportional force control | |
| [17] | 2 | 1 kHz | MAV, RMS, MAX, SUM | Fuzzy logic-based classification scheme | An affordable hand prosthesis to distinguish six different grip patterns | An offline accuracy of 97 % on thirteen subjects | |
| [89] | 8 | 200 Hz | RMS | Pressure vector decoding | Provide biomimetic finger control | Successfully controlled flexion of three phantom fingers | |
| [16] | 8 | 25 Hz | PSD, likelihood | RNN | Develop an effective human–robot collaboration scheme | Estimate human intentions in <1 s and decide to assist or avoid the human body | |
| [46] | 8 | 10 Hz | MAV | KNN | Propose a step counter to detect low-speed walking steps (<2.2 km/h) | A low error rate (<1.5%) at three walking speeds | |
| EMG | [82] | 4 | 1024 Hz | Integral of Absolute Value, VAR. | GK-SVM with PE or Wilson Amplitude (WAMP) | Distinguish gestures of standing, squatting, and sitting, upstairs, downstairs, and walking | Seven kinds of ADLs and falls were classified with accuracy from 96.43% to 97.35% |
| [84] | 8 | 200 Hz | MAV, ZC, SSC and WL. | CNN | Distinguish open hand, closed hand, wrist extension, wrist flexion, ulnar deviation, and radial deviation | Average accuracy of 97.81% on a database of seven hand and wrist gestures | |
| [138] | 5 | 2 kHz | CNN, RNN, Flourier Transformation. | Recurrent convolutional neural networks (RCNNs) | Distinguish five motions: biceps brachii, triceps brachii, anterior deltoid, posterior deltoid, and middle deltoid | An accuracy of 86.5–94.7% on eight subjects from two data sessions | |
| [83] | 8 | 2 kHz | WL, MAV, WAMP, Cardinality (CARD), SSC and ZC | LDA | Distinguish nine hand gestures | An accuracy of 84.78–98.56% on nine hand gestures of eight participants | |
| [85] | 4 | 1 kHz | MAV, ZC, WL and SSC | SVM | Distinguish six-foot movement: lift the toe, lift the heel, move the toe to the right, move the toe to the left, lean on the heel, lean on the toe, and rest foot | An accuracy of 52.86–95.71 for one channel; 81.43%-almost 100% for four channels | |
| [139] | 12 | 2 kHz | MAV, VAR, MAV slope (MAVSLP), and WL | Convolutional neural network–long short-term memory network (CNN-LSTM) | Distinguish gestures in EMG signal dataset Ninapro DB2 | The accuracy of 17 gestures is 83.91%. The accuracy for 20 subjects is 99.17% | |
| [140] | 4 | 20 Hz | Multivariate Multiscale Entropy (MMSE) and Multivariate Multiscale Fuzzy Entropy (MMFE) | SVM | Data of uterine EMG | An accuracy of 86.4–96.5% on 300 records of the TPEHG DB database. | |
| EIT | [88] | 8 | 40 kHz | / | SVM, RF, KNN, LR, Adaboost | Worn on the wrist to classify 11 gestures with different algorithms | Accuracy is higher than 95%, in the Adaboost algorithm achieved the highest accuracy of 98.11% |
| [3] | 8 | 40 kHz | / | SVM | Test the accuracy of hand set with seven gestures and pinch set with four gestures on wrist and arm, respectively | Achieved higher accuracy on the wrist than on the arm, with the highest accuracy of 96.6% | |
| [141] | 8, 16, 32 | 40 kHz | / | SVM | Test the accuracy with different electrode numbers for 11 gestures | Get an accuracy of 88.5% with 8 electrodes, 92.4% with 16 electrodes, and 94.3% with 32 electrodes | |
| [130] | 16 | 125 kHz | / | DT (Fine Tree, Medium Tree), SV (Quadratic, Cubic, Medium Gaussian), ANN | Using different algorithms to test the accuracy of 2D and 3D EIT with different wristband separations | 96.6% for DT(Cubic), 97.4% for (Medium Gaussian), and 97.7% for ANN, 5cm band separation is the best | |
| [142] | 8 | 40 kHz | / | SoftMax, SVM, CNN | Worn on the forearm to classify 10 gestures with different algorithms | CNN has the highest accuracy of 96.66% for all the 10 gestures | |
| [64] | 8 | 50 kHz–1 MHz | / | SVM | Worn on the wrist to classify three gestures with four different electrode materials | An accuracy of 76.7% with medical electrodes, 93.3% with conductive cloth electrodes, 96.7% with conductive cloth electrodes, 96.7% with curved copper electrodes | |
| [73] | 8 | 20 kHz | / | Quadratic Discriminant | Test the accuracy for nine gestures based on two-terminal EIT | Obtain accuracy of 98.5% |
| Technique | Robustness | SNR | System Complexity | Frequency | Cost | Advantage | Disadvantage |
|---|---|---|---|---|---|---|---|
| FMG | Excellent | High | Simple | 0–100 Hz | Low | Considerable output, high anti-interference ability. Better performance in dynamic motion. Suitable for most situations | It is difficult to ensure that the sensors are exactly installed in the same location and have the same pressure. Sensors may shift during use |
| EMG | Poor | Low | Normal | 20–500 Hz | High | Signal ahead of action, better predictability | Equipment noise. Interference of skin surface factors. Motion artifacts and natural frequency instability |
| EIT | Poor | Low | Normal | 1 k–1 MHz | Low | Reflect the internal physiological state of the detection area | Low spatial resolution. Complicated inverse problem. The results are difficult to quantify |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Z.; Wu, Z.; Zhao, R.; Ni, Y.; Jing, X.; Gao, S. A Review of EMG-, FMG-, and EIT-Based Biosensors and Relevant Human–Machine Interactivities and Biomedical Applications. Biosensors 2022, 12, 516. https://doi.org/10.3390/bios12070516
Zheng Z, Wu Z, Zhao R, Ni Y, Jing X, Gao S. A Review of EMG-, FMG-, and EIT-Based Biosensors and Relevant Human–Machine Interactivities and Biomedical Applications. Biosensors. 2022; 12(7):516. https://doi.org/10.3390/bios12070516
Chicago/Turabian StyleZheng, Zhuo, Zinan Wu, Runkun Zhao, Yinghui Ni, Xutian Jing, and Shuo Gao. 2022. "A Review of EMG-, FMG-, and EIT-Based Biosensors and Relevant Human–Machine Interactivities and Biomedical Applications" Biosensors 12, no. 7: 516. https://doi.org/10.3390/bios12070516
APA StyleZheng, Z., Wu, Z., Zhao, R., Ni, Y., Jing, X., & Gao, S. (2022). A Review of EMG-, FMG-, and EIT-Based Biosensors and Relevant Human–Machine Interactivities and Biomedical Applications. Biosensors, 12(7), 516. https://doi.org/10.3390/bios12070516