Respiration Signal Pattern Analysis for Doppler Radar Sensor with Passive Node and Its Application in Occupancy Sensing of a Stationary Subject

Abstract
:1. Introduction
2. Materials and Methods
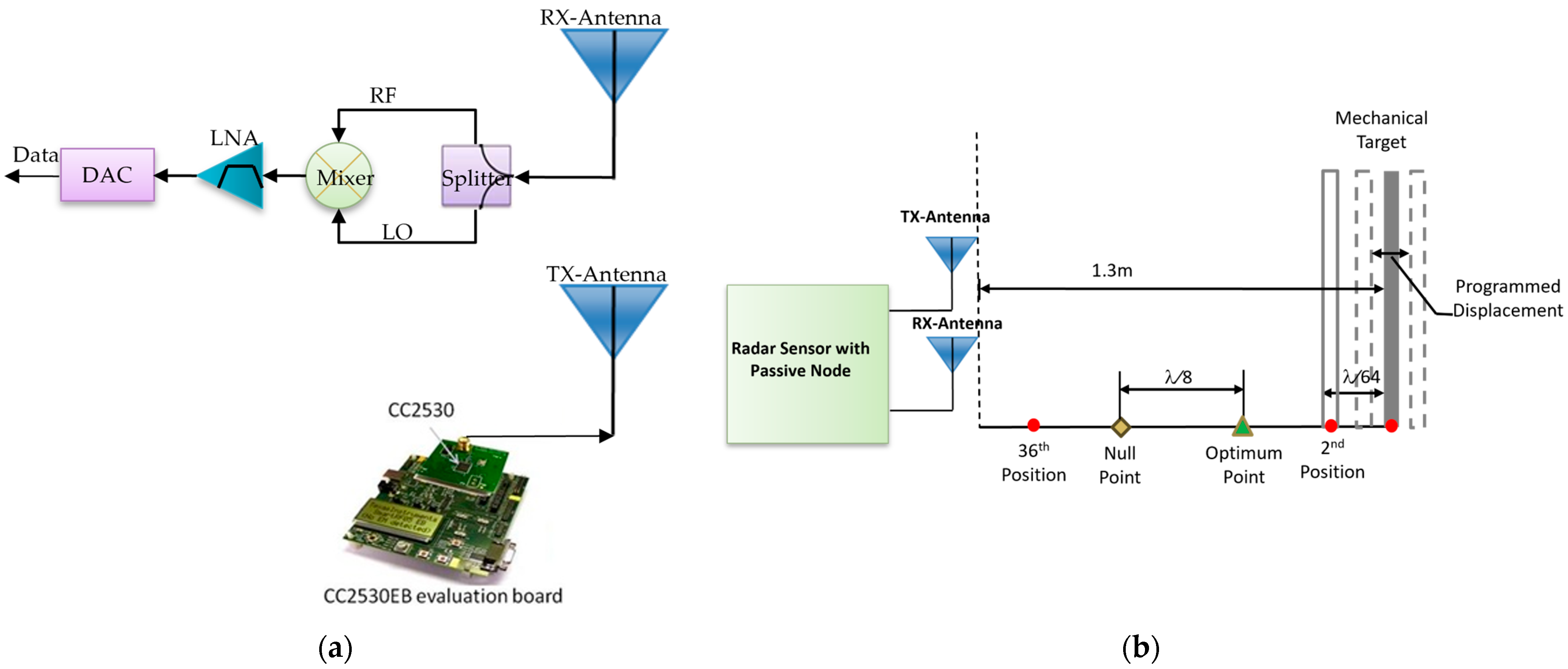
2.1. Doppler Radar Based Sensor with Passive Sensor Node
2.2. Methods
2.2.1. Respiration Signal Pattern Analysis with Sinusoidal Models
2.2.2. Respiration Signal Pattern Analysis with Complex Signal Model
2.2.3. Algorithm to Determine the Occupancy of a Stationary Subject
2.2.4. Occupancy Determination of a Stationary Subject
3. Results
3.1. Respiration Signal Pattern Analysis Results
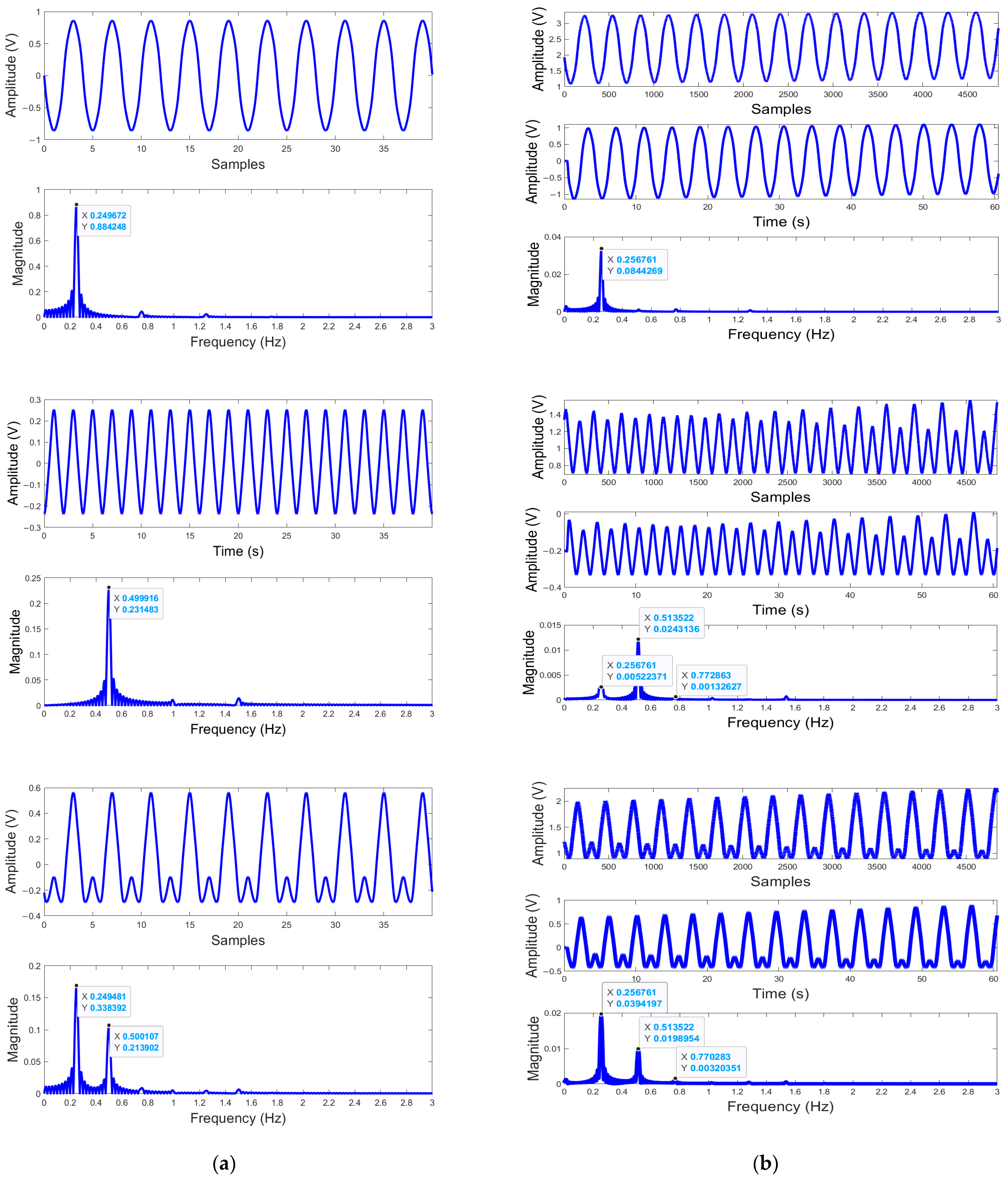
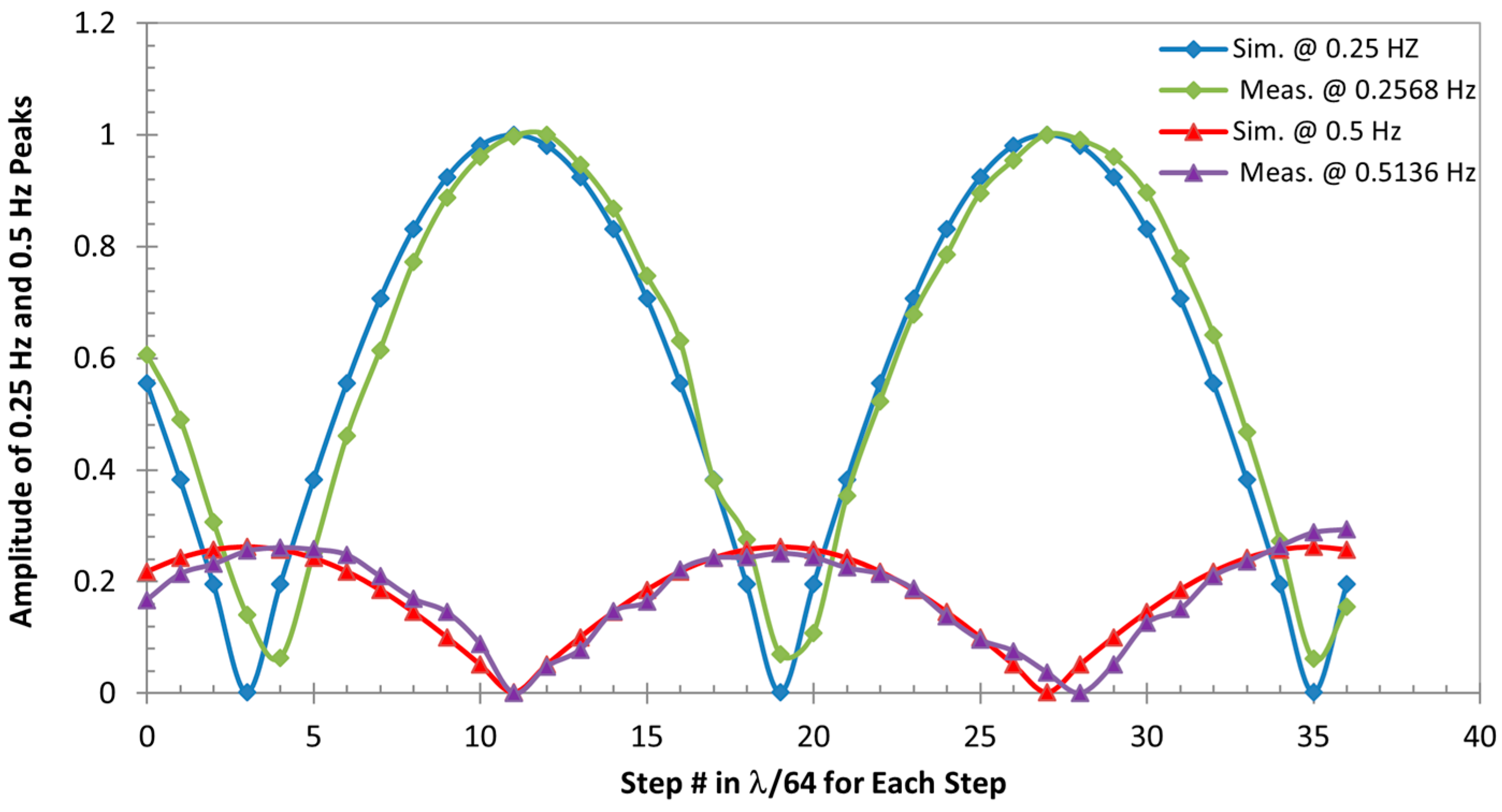
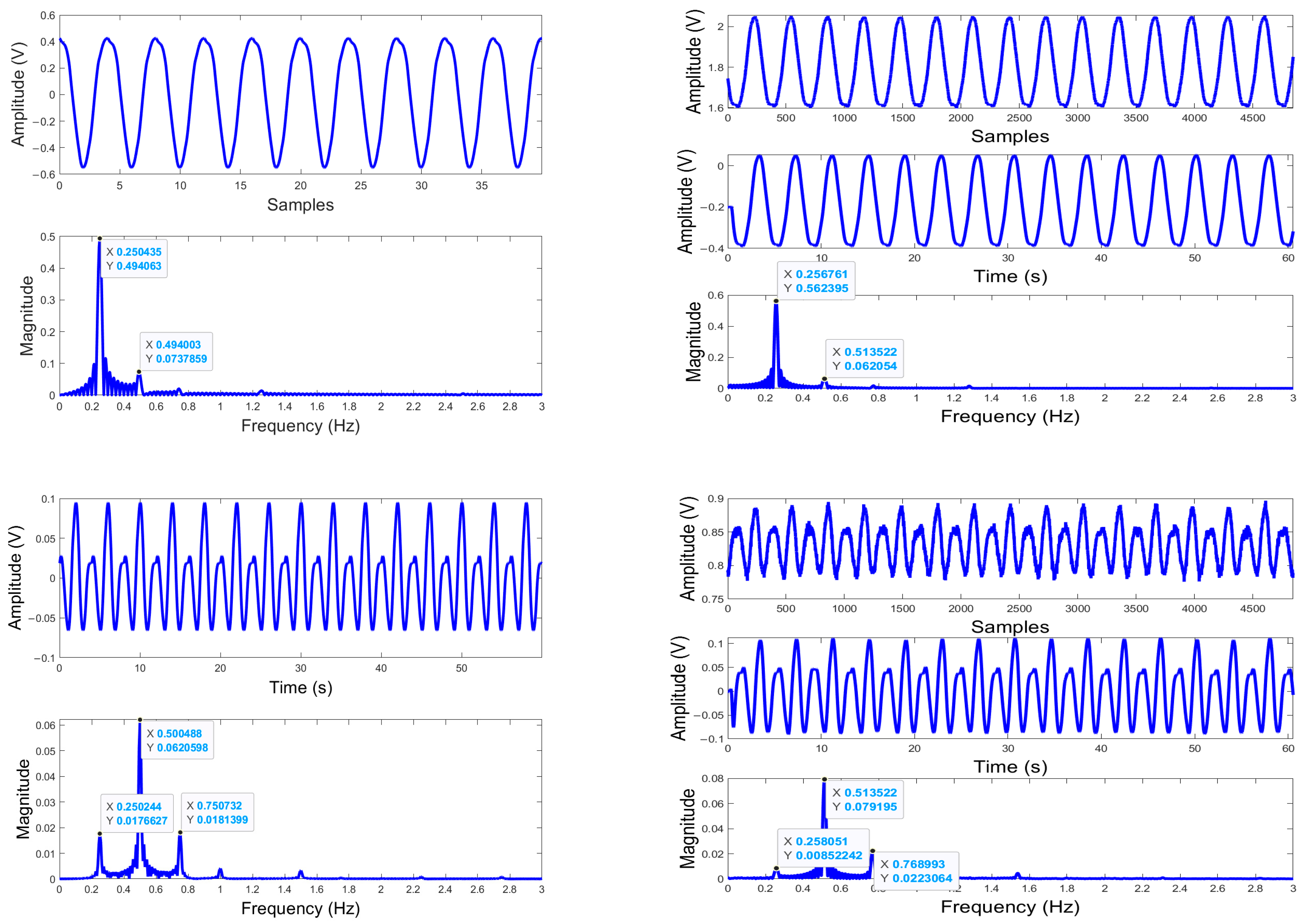
3.1.1. Results Obtained Using Sinusoidal Models
3.1.2. Results Obtained Using Complex Signal Models
3.2. Occpancy Determination of a Stationary Subject
3.2.1. Algorithm Developed to Determine the Occupancy of a Stationary Person
3.2.2. Proof-of-Concept Test Results Using the Occupancy Algorithm for Detecting a Stationary Person
4. Discussion
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CSI | Channel state information |
| CW | Continuous wave |
| HVAC | Lighting, heating, ventilation, and air-conditioning |
| LO | Local oscillator |
| PIR | Passive infrared |
| RF | Radio frequency |
| RX | Receive |
| SoC | System-on-chip |
| TX | Transmit |
| WSSN | Wireless smart sensor network |
References
- U.S. Energy Information Administration. International Energy Outlook 2021 with Projections to 2050. Available online: https://www.eia.gov/outlooks/ieo/pdf/IEO2021_Narrative.pdf (accessed on 17 February 2025).
- D’Oca, S.; Hong, T.; Langevin, J. The Human Dimensions of Energy Use in Buildings: A Review. Renew. Sustain. Energy Rev. 2018, 81, 731–742. [Google Scholar] [CrossRef]
- Ji, Q.; Bi, Y.; Makvandi, M.; Deng, Q.; Zhou, X.; Li, C. Modelling Building Stock Energy Consumption at the Urban Level from an Empirical Study. Buildings 2022, 12, 385. [Google Scholar] [CrossRef]
- Lee, J.-W.; Kim, Y.I. Energy Saving of a University Building Using a Motion Detection Sensor and Room Management System. Sustainability 2020, 12, 9471. [Google Scholar] [CrossRef]
- Hosamo, H.; Mazzetto, S. Data-Driven Ventilation and Energy Optimization in Smart Office Buildings: Insights from a High-Resolution Occupancy and Indoor Climate Dataset. Sustainability 2025, 17, 58. [Google Scholar] [CrossRef]
- Better Buildings Solution Center, U.S. Department of Energy. Wireless Sensor for Lighting Energy Savings. Available online: https://betterbuildingssolutioncenter.energy.gov/sites/default/files/attachments/Wireless-Sensors-Guidance.pdf (accessed on 17 February 2025).
- Chaudhari, P.; Xiao, Y.; Cheng, M.M.-C.; Li, T. Fundamentals, Algorithms, and Technologies of Occupancy Detection for Smart Buildings Using IoT Sensors. Sensors 2024, 24, 2123. [Google Scholar] [CrossRef]
- Becerik-Gerber, B.; Lucas, G.; Aryal, A.; Awada, M.; Bergés, M.; Billington, S.; Boric-Lubecke, O.; Ghahramani, A.; Heydarian, A.; Höelscher, C.; et al. The Field of Human Building Interaction for Convergent Research and Innovation for Intelligent Built Environments. Sci. Rep. 2022, 12, 22092. [Google Scholar] [CrossRef]
- Mena, A.R.; Ceballos, H.G.; Alvarado-Uribe, J. Measuring Indoor Occupancy through Environmental Sensors: A Systematic Review on Sensor Deployment. Sensors 2022, 22, 3770. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.L.; Park, K.J.; Son, S.Y. Occupancy-Based Energy Consumption Estimation Improvement through Deep Learning. Sensors 2023, 23, 2127. [Google Scholar] [CrossRef]
- Anand, P.; Cheong, D.; Sekhar, C. A Review of Occupancy-Based Building Energy and IEQ Controls and Its Future Post-COVID. Sci. Total Environ. 2022, 804, 150249. [Google Scholar] [CrossRef]
- Sourav, M.S.G.; Yavari, E.; Gao, X.; Maskrey, J.; Zheng, Y.; Lubecke, V.M.; Boric-Lubecke, O. Occupancy Estimation from Blurred Video: A Multifaceted Approach with Privacy Consideration. Sensors 2024, 24, 3739. [Google Scholar] [CrossRef]
- California Energy Commission. 2019 Building Energy Efficiency Standards for Residential and Nonresidential Buildings. Available online: https://www.energy.ca.gov/sites/default/files/2021-06/CEC-400-2018-020-CMF_0.pdf (accessed on 25 February 2025).
- Shokrollahi, A.; Persson, J.A.; Malekian, R.; Sarkheyli-Hägele, A.; Karlsson, F. Passive Infrared Sensor-Based Occupancy Monitoring in Smart Buildings: A Review of Methodologies and Machine Learning Approaches. Sensors 2024, 24, 1533. [Google Scholar] [CrossRef]
- Garg, V.; Bansal, N.K. Smart Occupancy Sensors to Reduce Energy Consumption. Energy Build. 2000, 32, 81–87. [Google Scholar] [CrossRef]
- Yavari, E.; Song, C.; Lubecke, V.; Boric-Lubecke, O. Is There Anybody in There? Intelligent Radar Occupancy Sensors. IEEE Microw. Mag. 2014, 15, 57–64. [Google Scholar] [CrossRef]
- Gennarelli, G.; Colonna, V.E.; Noviello, C.; Pema, S.; Soldovieri, F.; Catapano, I. CW Doppler Radar as Occupancy Sensor: A Comparison of Different Detection Strategies. Front. Signal Process. 2022, 2, 847980. [Google Scholar] [CrossRef]
- Santra, A.; Ulaganathan, R.V.; Finke, T. Short-Range Millimetric-Wave Radar System for Occupancy Sensing Application. IEEE Sens. Lett. 2018, 2, 1–4. [Google Scholar] [CrossRef]
- Cardillo, E.; Li, C.; Caddemi, A. Heating, Ventilation, and Air Conditioning Control by Range-Doppler and Micro-Doppler Radar Sensor. In Proceedings of the 18th European Radar Conference (EuRAD), London, UK, 16–18 June 2022. [Google Scholar]
- Song, C.; Droitcour, A.D.; Islam, S.M.M.; Whitworth, A.; Lubecke, V.; Boric-Lubecke, O. Unobtrusive Occupancy and Vital Signs Sensing for Human Building Interactive Systems. Sci. Rep. 2023, 13, 954. [Google Scholar] [CrossRef]
- Droitcour, A.D.; Islam, S.M.M.; Neville, R.; Topping, M.; Peppard, E.; Lubecke, V.; Boric-Lubecke, O. Microwave Doppler Radar Occupancy Sensing for HVAC Energy Savings. IEEE J. Microw. 2024, 4, 919–927. [Google Scholar] [CrossRef]
- Song, C.; Yavari, E.; Singh, A.; Lubecke, V.; Boric-Lubecke, O. Detection Sensitivity and Power Consumption vs. Operation Modes Using System-on-Chip Based Doppler Radar Occupancy Sensor. In Proceedings of the 2012 IEEE Topical Conference on Biomedical Wireless Technologies, Networks, and Sensing Systems (BioWireleSS), Santa Clara, CA, USA, 15–18 January 2012. [Google Scholar]
- Son, J.; Park, J. Channel State Information (CSI) Amplitude Coloring Scheme for Enhancing Accuracy of an Indoor Occupancy Detection System Using Wi-Fi Sensing. Appl. Sci. 2024, 14, 7850. [Google Scholar] [CrossRef]
- Ishmael, K.M.; Pan, Y.; Landika, D.; Zheng, Y.; Lubecke, V.M.; Boric-Lubecke, O. Physiological Motion Sensing via Channel State Information in NextG Millimeter-Wave Communications Systems. IEEE J. Microw. 2023, 3, 227–236. [Google Scholar] [CrossRef]
- Texas Instruments. Available online: https://www.ti.com/product/CC2530 (accessed on 25 February 2025).
- Park, B.K.; Yamada, S.; Boric-Lubecke, O.; Lubecke, V. Single-Channel Receiver Limitations in Doppler radar Measurements of Periodic Motion. In Proceedings of the 2006 IEEE Radio and Wireless Symposium, San Diego, CA, USA, 17–19 January 2006. [Google Scholar]
- Morgan, D.R.; Zierdt, M.G. Novel Signal Processing Techniques for Doppler Radar Cardiopulmonary Sensing. Signal Process. 2009, 89, 45–66. [Google Scholar] [CrossRef]
- Oku, Y. Temporal Variations in the Pattern of Breathing: Techniques, Sources, and Applications to Translational Sciences. J. Physiol. Sci. 2022, 72, 22. [Google Scholar] [CrossRef] [PubMed]
- Song, C. System-on-Chip Based Doppler Radar Occupancy Sensor with Add-on Passive Node. Ph.D. Dissertation, University of Hawaii at Manoa, Honolulu, HI, USA, December 2014. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | f0 1 by Radar | f1 1 by Radar | f2 1 by Radar | F 1,2 by IR Camera |
|---|---|---|---|---|
| 1 | 0.23 3 | 0.46 | - | 0.23 |
| 2 | 0.19 | 0.39 3 | - | 0.36 |
| 3 | 0.27 | - | - | 0.27 |
| 4 | 0.26 | - | - | 0.28 |
| 5 | 0.16 | 0.32 3 | - | 0.33 |
| 6 | 0.34 | - | - | 0.34 |
| 7 | 0.24 3 | 0.49 | - | 0.24 |
| 8 | 0.24 | - | 0.23 | |
| 9 | 0.14 3 | 0.28 | 0.42 | 0.14 |
| 10 | 0.21 | - | - | 0.21 |
| 11 | 0.15 | - | - | 0.15 |
| 12 | 0.26 | - | - | 0.26 |
| 13 | 0.28 3 | 0.56 | - | 0.28 |
| 14 | 0.17 3 | 0.35 | - | 0.17 |
| 15 | 0.27 | - | - | 0.27 |
| 16 | 0.13 3 | 0.28 | - | 0.14 |
| 17 | 0.21 3 | 0.42 | 0.64 | 0.21 |
| 18 | 0.32 | - | - | 0.33 |
| 19 | 0.26 | - | - | 0.26 |
| Subject | Window 1 1 | Window 2 1 | Window 3 1 | Window 4 1 | Window 5 1 | Window 6 1 |
|---|---|---|---|---|---|---|
| 1 | 0.18 | 0.27 | 0.27 | 0.18 | 0.27 | 0.18 |
| 2 | 0.10 | 0.39 | 0.10 | 0.39 | 0.39 | 0.29 |
| 3 | 0.29 | 0.29 | 0.29 | 0.29 | 0.23 | 0.23 |
| 4 | 0.12 | 0.23 | 0.06 | 0.12 | 0.41 | 0.12 |
| 5 | 0.29 | 0.29 | 0.35 | 0.35 | 0.12 | 0.06 |
| 6 | 0.41 | 0.35 | 0.35 | 0.29 | 0.29 | 0.35 |
| 7 | 0.29 | 0.23 | 0.18 | 0.23 | 0.23 | 0.23 |
| 8 | 0.12 | 0.23 | 0.12 | 0.23 | 0.06 | 0.06 |
| 9 | 0.12 | 0.35 | 0.12 | 0.29 | 0.12 | 0.06 |
| 10 | 0.18 | 0.18 | 0.23 | 0.18 | 0.23 | 0.23 |
| 11 | 0.18 | 0.12 | 0.12 | 0.18 | 0.18 | 0.18 |
| 12 | 0.23 | 0.29 | 0.12 | 0.23 | 0.06 | 0.12 |
| 13 | 0.26 | 0.26 | 0.29 | 0.29 | 0.26 | 0.26 |
| 14 | 0.23 | 0.29 | 0.23 | 0.18 | 0.12 | 0.12 |
| 15 | 0.29 | 0.29 | 0.29 | 0.29 | 0.29 | 0.35 |
| 16 | 0.12 | 0.18 | 0.12 | 0.12 | 0.12 | 0.12 |
| 17 | 0.23 | 0.23 | 0.18 | 0.23 | 0.18 | 0.18 |
| 18 | 0.12 | 0.12 | 0.35 | 0.41 | 0.29 | 0.35 |
| 19 | 0.23 | 0.23 | 0.29 | 0.29 | 0.23 | 0.23 |
| 20 | 0.29 | 0.29 | 0.29 | 0.29 | 0.29 | 0.29 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, C.; Yavari, E.; Gao, X.; Lubecke, V.M.; Boric-Lubecke, O. Respiration Signal Pattern Analysis for Doppler Radar Sensor with Passive Node and Its Application in Occupancy Sensing of a Stationary Subject. Biosensors 2025, 15, 273. https://doi.org/10.3390/bios15050273
Song C, Yavari E, Gao X, Lubecke VM, Boric-Lubecke O. Respiration Signal Pattern Analysis for Doppler Radar Sensor with Passive Node and Its Application in Occupancy Sensing of a Stationary Subject. Biosensors. 2025; 15(5):273. https://doi.org/10.3390/bios15050273
Chicago/Turabian StyleSong, Chenyan, Ehsan Yavari, Xiaomeng Gao, Victor M. Lubecke, and Olga Boric-Lubecke. 2025. "Respiration Signal Pattern Analysis for Doppler Radar Sensor with Passive Node and Its Application in Occupancy Sensing of a Stationary Subject" Biosensors 15, no. 5: 273. https://doi.org/10.3390/bios15050273
APA StyleSong, C., Yavari, E., Gao, X., Lubecke, V. M., & Boric-Lubecke, O. (2025). Respiration Signal Pattern Analysis for Doppler Radar Sensor with Passive Node and Its Application in Occupancy Sensing of a Stationary Subject. Biosensors, 15(5), 273. https://doi.org/10.3390/bios15050273