1. Introduction
Bearing is widely used in metallurgy, electric power and the machinery manufacturing industry [
1]. Bearing failure affects the normal operation and production efficiency of equipment and even causes a serious loss of life and property [
2]. Therefore, bearing fault diagnosis is important. The running process of the bearing is complicated, and the vibration signal is a nonlinear and non-stationary signal, which brings great challenges to fault diagnosis.
Hilbert envelope demodulation is the commonly used feature extraction method [
3], which can identify the vibration shock contained in the modulated signals. Envelope demodulation is effective when used for a single frequency modulation and amplitude modulation (AM-FM) signal [
4]. However, modulation signals are often mixed with carrier signals and noises. In order to obtain the AM-FM signal, the original signal needs to be decomposed before demodulation [
5]. The commonly used decomposition algorithms include empirical mode decomposition (EMD) [
6] and variational mode decomposition (VMD) [
7], etc. The results of VMD depend on the setting of its two parameters. The intrinsic mode functions (IMFs) obtained by EMD have an endpoint effect problem and are mixed with each other. To solve the problems, ensemble empirical mode decomposition (EEMD) [
8] and complementary ensemble empirical mode decomposition (CEEMD) [
9] are proposed. Gao decomposed the bearing signal into several IMFs through EEMD, and selected the effective IMFs by the correlation coefficient and root mean square [
10]. Although EEMD can suppress mode mixing to a certain extent, the added white noises cannot be eliminated completely [
11]. In the CEEMD, white noises are added in pairs to the original signal to generate two sets of ensemble IMFs. CEEMD can eliminate the residue of added white noises totally no matter how many noises it contains [
9]. Gu decomposed the bearing signal through CEEMD and selected the effective IMFs with a large correlation coefficient [
11]. Li decomposed the underwater acoustic signals by complete ensemble empirical mode decomposition with adaptive noise (CEEMDAN) and identified noisy IMFs through the minimum mean square variance criterion [
12]. Li decomposed warship radio noise signals by CEEMDAN and used a duffing chaotic oscillator to accurately detect the linear spectrum frequency of low-frequency IMFs [
13], which can better suppress mode mixing. However, EEMD and CEEMD based on auxiliary noises have high computational complexity and low efficiency [
14]. Wang proposed fast ensemble empirical mode decomposition (FEEMD) [
15], which is gradually used in wind speed forecasting. Chegini decomposed the vibration signal into several IMFs by FEEMD and selected effective IMFs by autocorrelation function [
16]. Sun determined the effective IMFs through FEEMD and correlation coefficient and improved the accuracy of wind speed forecasting [
17]. The results show that the speed of FEEMD is fast, and the decomposition error is smaller than that of EEMD.
The IMFs obtained by EEMD and FEEMD contain carrier signals, impact components and noises, so it is important to select IMFs. Many scholars use energy, kurtosis and the correlation coefficient to select effective IMFs. If a selection method based on a single index is used, the IMFs related to the fault impact may be removed, and the IMFs related to noise may be retained. Xia decomposed the signal by VMD and selected effective IMFs with the maximum correlation coefficient and kurtosis [
18]. Most of the noises can be removed by reconstructing the effective IMFs. However, there are still some noises in the reconstructed signal, which causes the impacts related to faults to be submerged in the noises. Therefore, the fault impacts need to be enhanced and extracted from the reconstructed signal, which can be regarded as a deconvolution process [
19] and can be achieved by minimum entropy deconvolution (MED) and maximum correlation kurtosis deconvolution (MCKD), etc. He proposed an adaptive MED based on autocorrelation energy ratio, which makes it possible that recover a single random pulse when the filter length is not improper [
20]. However, MED can only extract a single impact from the signal. Zhang selected effective IMFs through the weighted kurtosis index and then extracted the periodic impacts based on MCKD [
21]. Cui decomposed the signal by VMD, finally selecting the sensitive mode through kurtosis and extracting periodic shocks [
22] by MCKD. Although MCKD can extract a series of impacts, it cannot extract the complete periodic impacts [
23]. Li decomposed the signal through the Hankel matrix and obtained various forms of noises, then extracted the periodic impacts of the reconstructed signal through multipoint optimal minimum entropy deconvolution adjusted (MOMEDA) [
24]. Zhou decomposed the bearing signal through VMD and selected effective IMFs through the average of kurtosis, then extracted the periodic impacts through MOMEDA [
25]. Xiao optimized the filter length of MOMEDA, then enhanced the periodic impacts and extracted the bearing fault frequencies [
26]. Many studies have shown that the method combining MOMEDA with a decomposition algorithm can not only extract the periodic impacts contained in the noisy signal but also suppress the noise to a certain extent. In addition to the above methods, some very classic and useful methods are also worthy of our reference. Bayram [
27] calculated the energy of the noisy and noise-free signal and obtained the wavelet coefficients that were used in classifying, proposing a feature extraction method based on the wavelet coefficient. Kaya [
28] proposed a new feature extraction method based on co-occurrence matrices for bearing vibration signals, and the correlation, energy, homogeneity and contrast features were extracted from the co-occurrence matrices. To solve the spectral segmentation defect of the empirical wavelet transform (EWT) and improve its ability to extract fault features, Liu [
29] proposed a new algorithm based on maximum envelope fitting and proposed a sensitive IMFs assessing index to obtain the characteristics of the time–frequency domain and amplitude domain to extract fault information. KAYA [
30] proposed a technique based on continuous wavelet transform (CWT) and two dimensional (2D) convolutional neural networks (CNN) to detect the fault size from vibration data of various bearing failure types. Kuncan [
31] proposed a bearing fault diagnosis method combined with one-dimensional local binary pattern and gray relational analysis, and the fault identification accuracy was shown to reach 99.3%. Han [
32] extracted five feature vectors through freeman chain codes, then online diagnosis was achieved through an improved brainstorm optimization (BSO) algorithm.
However, some new problems can be found in fault feature extraction. Although FEEMD improves the decomposition efficiency, the white noises added to FEEMD cannot be eliminated completely, which leads to mode mixing. Secondly, the effective IMFs selection methods based on a single index cannot easily retain the IMFs related to vibration and shock, and the effect of noise suppression is also poor. Thirdly, the iterative of MED and MCKD is complicated, and the resulting filter is not necessarily a global optimal filter [
24], which makes it difficult to extract periodic impacts effectively.
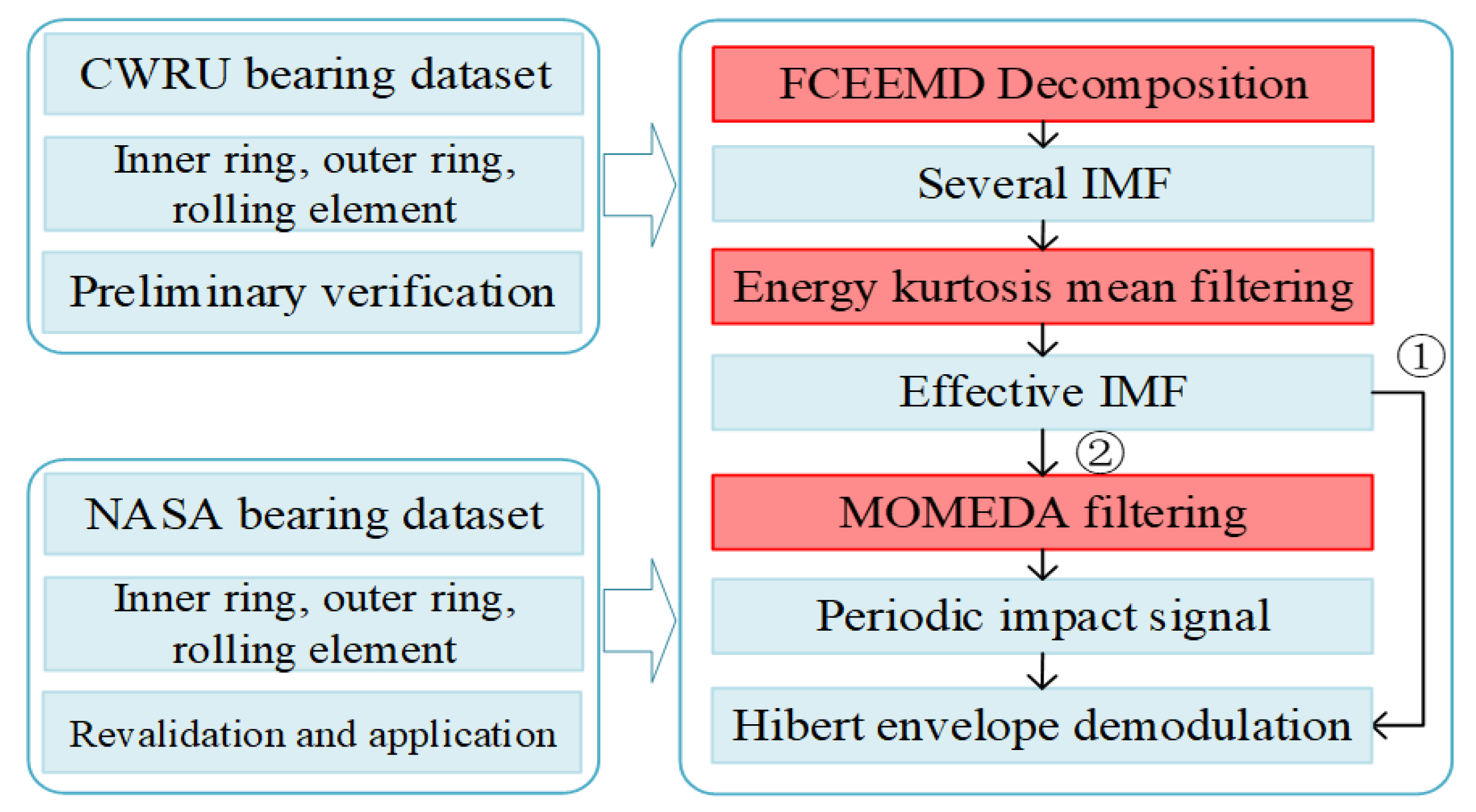
In view of the above problems, the contributions and innovations of the paper are as follows. To eliminate the mode mixing in FEEMD, pairs of white noises with opposite signs are added to the signal before each round of decomposition. To select the effective IMFs related to faults, the energy and kurtosis of each IMF are assigned a weight, respectively, and fused into an index, which is called the energy kurtosis weighted index. The average of all weighted indices is used as a threshold to select effective IMFs, called energy kurtosis mean filtering. The selected IMFs are reconstructed into a reconstructed signal. Finally, MOMEDA [
23] is used to extract the periodic impacts in the reconstructed signal, and the fault frequencies can be extracted by Hilbert envelope demodulation. In summary, the proposed method can extract bearing fault features effectively, and it provides technical guidance for fault diagnosis.
The remainder of this paper is organized as follows. In
Section 2, the methodology of the proposed feature extraction method is introduced in detail. In
Section 3, the validity of the proposed method is verified through the Case Western Reserve University (CWRU) bearing datasets. In
Section 4, the proposed method is applied to analyze the NASA bearing datasets, and the validity of the method is verified again. In
Section 5, the superiority of the proposed method is validated by comparing various methods. The conclusions are summarized in
Section 6.
4. Method Verification and Application
To verify the reliability of the proposed method, the NASA bearing dataset is analyzed. The experimental platform [
39] is shown in
Figure 12a, and four Rexnord ZA-2115 bearings are mounted on the same spindle. The rotational speed of the spindle is 2000 rpm in the motor drive, and the rotating frequency (Fs) of the bearing is 33.33 Hz (fr = 2000/60 = 33.33 Hz). The PCB353B33 sensors are installed on the bearing housing, and the signal is collected by the DAQ-6062E acquisition card. The sampling frequency is 20 kHz, and the length of each set of data is 20480. The inner ring signal from the Bearing 3 of the No.1 dataset, the outer ring signal from the Bearing 1 of the No.2 dataset, the rolling element signal from Bearing 3 of the NO.1 dataset and the data length is 2048.
According to the formulas of fault frequency in ref. [
38] and the parameters in
Table 3, the fault frequencies of NASA bearing are shown in
Table 4. The important frequencies mainly include the ball pass frequency of the inner race (BPFI), the ball pass frequency of the outer race (BPFO), the ball spin frequency (BSF) and rotating frequency (Fs).
4.1. Inner Ring Fault Feature Extraction Application
The time and frequency domain waveforms of the inner ring signal are shown in
Figure 13a. The signal contains some impact components. However, the period of these impact signals is not significant compared with the inner ring signal of the CWRU dataset. The fault frequency of the inner ring is submerged by a series of complex frequencies, which makes it particularly difficult to extract the fault feature. Therefore, the signal is decomposed by FCEEMD, and the effective IMFs are selected by energy kurtosis mean filtering.
As shown in
Figure 14a, the energy of the IMFs decreases gradually, and IMF1 contains most of the energy. The kurtosis of the IMF3 is the largest, and the kurtosis of other IMFs shows no regularity in variation. The IMFs whose energy kurtosis weighted index is less than the threshold are regarded as false components and removed. Therefore, the effective IMFs include IMF1, IMF2 and IMF3, and the envelope demodulation of the effective IMF reconstruction signal is shown in
Figure 14b.
As shown in
Figure 14b, the envelope spectrum shows an obvious peak at 293 Hz, which is close to the fault frequency of 296.9035 Hz. Meanwhile, the rotating frequency Fs = 33.33 Hz and its frequency multiplication appear in the low-frequency part. The modulation frequencies of inner ring fault frequency (BSFI) and rotating frequency (Fs) also appear in the envelope spectrum. Because of the influence of noises, there is some deviation between the theoretical and the measured value. The experimental results show the effectiveness of the method based on FCEEMD energy kurtosis mean filtering. However, the envelope spectrum still contains frequencies unrelated to the faults. These frequencies interfere with the identification of the fault frequency. We extract the periodic impacts from the reconstructed signal through MOMEDA.
As shown in
Figure 15b, MOMEDA effectively extracts the periodic impacts in the reconstructed signal and weakens the frequencies unrelated to the faults. It is noteworthy that peaks appear at 293 Hz, 585.9 Hz, 878.9 Hz and 1172 Hz, etc. These peaks correspond to the inner ring fault frequency 296.91 Hz and its double frequency 593.82 Hz, triple frequency 890.73 Hz, quadrupled frequency 1187.64 Hz and so on. Because of the influence of noises, there is some deviation between the theoretical value and the measured value. The inner ring fault can be identified accurately according to the characteristic frequency.
4.2. Outer Ring Fault Feature Extraction Application
The time and frequency domain waveforms of the outer ring signal are shown in
Figure 16a. There are many interference frequencies in the frequency domain diagram, and the fault frequency is not obvious. Therefore, the outer ring signal is decomposed by FCEEMD, and the effective IMFs are selected by energy kurtosis mean filtering.
As shown in
Figure 17a, the changing trend of the energy and kurtosis of the IMFs is irregular. According to the proposed method, the effective IMFs include IMF4 and IMF5, and the envelope demodulation of the effective IMFs reconstruction signal is shown in
Figure 17b. Two obvious spectrum peaks appear at 61.59 Hz and 459 Hz. The two peaks correspond to the double frequency of the rotating frequency (2Fs = 66.66 Hz) and the double frequency of the outer ring fault frequency (472.8 Hz). The envelope spectrum shows three obvious peaks in the low-frequency part, and the three peaks correspond to the rotating frequency 33.33 Hz and its double frequency 66.66 Hz, with frequency quintupling at 166.65 Hz. Moreover, a peak appears at 224.6 Hz, which is close to the fault frequency of 236.4 Hz of the outer ring. The modulation frequencies of the outer ring fault frequency (BSFO) and rotating frequency (Fs) also appear in the envelope spectrum. Because of the influence of noises, the absolute error between the measured value and theoretical value is 236.4 Hz − 224.6 Hz = 11.8 Hz, and the relative error is 0.0499. Although the envelope spectrum contains clear fault frequencies, there are still many interference frequencies, and the fault features are not easy to be extracted. We extract the periodic impacts from the reconstructed signal through MOMEDA. The results are shown in
Figure 18a,b.
MOMEDA effectively extracts the periodic impacts in the reconstructed signal and weakens the frequency components unrelated to faults. It is noteworthy that peaks appear at 234.4 Hz, 474.6 Hz, 709 Hz and 943.4 Hz, etc. These peaks correspond to the outer ring fault frequency 236.4 Hz and its double frequency 472.8 Hz, triple frequency 709.2 Hz, quadrupled frequency 945.6 Hz and so on. After adding MOMEDA, the absolute error between the measured value and theoretical value is 236.4 Hz − 234.4 Hz = 2 Hz, and the relative error is 0.0085, which greatly reduces the frequency error and improves the fault detection accuracy.
4.3. Rolling Element Fault Feature Extraction Application
The time and frequency domain waveforms of the rolling element fault signal are shown in
Figure 19a. Compared with the vibration signals of the inner ring and the outer ring, the periodic impacts of the rolling element signal are not obvious. Moreover, the fault frequency is almost submerged by complex frequencies, and it is difficult to extract fault frequency from the frequency domain. Therefore, the rolling element signal is decomposed by FCEEMD, and the effective IMFs are selected by energy kurtosis mean filtering. The results are shown in
Figure 19b and
Figure 20a.
The changes in the energy and kurtosis of the IMFs are not regulated, and the energy and kurtosis of the IMFs in the high-frequency band and the low-frequency band are relatively large. According to the energy kurtosis mean filtering, the effective IMFs include IMF1, IMF7, IMF8 and IMF9, and the envelope demodulation of the effective IMFs reconstruction signal is shown in
Figure 20b.
Two obvious spectrum peaks appear at 136.7 Hz and 273.4 Hz, which correspond to the rolling element fault frequency 139.9 Hz and its double frequency 279.8 Hz. Due to the influence of noises, the absolute error between the measured value and theoretical value is 139.9 Hz − 136.7 Hz = 3.2 Hz, and the relative error is 0.0229. Furthermore, there are several peaks in the low-frequency part of the envelope spectrum, which correspond to the rotating frequency (Fs = 33.33 Hz) and its frequency multiplication. However, there are not only the modulation signals of fault frequency and rotating frequency in the envelope spectrum but also many interference frequencies, which can cause difficulty in extracting the fault feature. Therefore, we extracted the periodic impacts from the reconstructed signal through MOMEDA. The results are shown in
Figure 21a,b.
Although the impacts of the rolling element vibration signal are not obvious, MOMEDA can still effectively extract the periodic impacts in the reconstructed signal and weaken the frequencies unrelated to the faults. It is noteworthy that the peaks appear at 140.6 Hz, 281.3 Hz, 421.9 Hz and 562.5 Hz, etc. These peaks correspond to the rolling element fault frequency 139.9 Hz and its double frequency 279.8 Hz, triple frequency 419.7 Hz, quadrupled frequency 559.6 Hz and so on. After adding MOMEDA, the absolute error between the measured value and theoretical value is 140.6 Hz − 139.9 Hz = 0.7 Hz, and the relative error is 0.005, which greatly reduces the frequency error. This means the rolling element fault can be diagnosed accurately.
5. Comparison Analysis of Different Feature Extraction Methods
By analyzing and summarizing the results above, we can draw a preliminary conclusion that the fault feature extraction of the rolling element is more difficult compared with the inner ring and outer ring. According to the theory of ref. [
40], the frequency spectrum contains the second harmonic of the spin frequency when the rolling element fails. The spin frequency of the rolling element is generated by impacting the inner ring or the outer ring through the rolling element. In general, the rolling element rotates once and produces two impacts. Therefore, the fault frequency of the rolling element is easily submerged by interference frequencies. Most existing methods can achieve better results in feature extraction of the inner ring and outer ring, but they have a poor effect on the feature extraction of the rolling element. These facts prove that the feature extraction of the rolling element is difficult, but the proposed method can achieve good results in the feature extraction of the rolling element.
To verify the superiority of the proposed method, a variety of methods were compared through the rolling element data of the CWRU dataset. In the comparative experiments, the data length was 2048.
5.1. Comparative Analysis of Feature Extraction Methods Based on Different Decomposition Methods
To verify the effectiveness of the MOMEDA demodulation method based on the decomposition method, we compared the method without signal decomposition with the methods based on several signal decomposition strategies. As shown in “MOMEDA” in
Figure 22, the envelope spectrum obtained by MOMEDA without signal decomposition contained a large amount of noise. The rolling element envelope spectrum obtained alone by DOMEDA contained many burrs and was coarse, so signal decomposition and noise reduction were indispensable and important processing links. Therefore, we decomposed the rolling element signals by EEMD, FEEMD and FCEEMD. In EEMD, the ratio of the standard deviation of the added noise and original signal (Nstd) was 0.2, and the ensemble member was 10. In FEEMD and FCEEMD, Nstd was 0.2, the number of IMF was 9, the number of screening iterations maxSift was 10 and the rest of the parameters were default values. For the IMFs obtained by each decomposition algorithm, the reconstruction error, root mean square error (RMSE), time-consuming (Time) and standard deviation (SD) are shown in
Figure 22a and
Table 5. The reconstruction error refers to the deviation between the original signal and the reconstructed signal of all IMFs.
As shown in
Figure 22a, both the reconstruction errors of the EEMD and FEEMD are large, while the reconstruction error (10
−16) of the FCEEMD can be neglected. The results show that the FCEEMD can decompose the signal into several IMFs completely, there is no energy leakage and RMSE also demonstrates this advantage of FCEEMD. In terms of being time-consuming, the decomposition efficiency of FEEMD and FCEEMD was high compared with EEMD, so they were suitable for real-time data processing. From the standard deviation of the reconstructed signal, the decomposed signals were stable and reliable. Therefore, FCEEMD had the characteristics of rapidity and high accuracy.
Similarly, we selected the effective IMFs by energy kurtosis mean filtering and extracted the periodic impacts in the effective IMFs reconstructed signal through the MOMEDA. The envelope demodulations of the periodic impacts are shown in
Figure 22b. All three methods obtained the fault frequencies of the rolling element and its harmonics. It is noteworthy that the amplitude of the envelope obtained by the EEMD method was small, and the spectrum peaks of the high-frequency band were hardly recognized. The spectrum peaks obtained by FEEMD and FCEEMD were relatively obvious, and the spectrum peaks of the high-frequency band were easily identified. In addition, the envelope spectrum obtained by FCEEMD was cleaner than that obtained by FEEMD, and the interference frequencies were less. Therefore, the feature extraction method based on FCEEMD was more efficient than others.
5.2. Comparative Analysis of Feature Extraction Methods Based on Different Effective IMFs Selection Methods
In the second experiment, the proposed method was compared with the method in ref. [
36]. Firstly, the rolling element signal was decomposed by EEMD, and then the IMFs that had a large correlation with the original signal were selected as effective IMFs, including IMF1, IMF2, IMF3, IMF4, IMF5 and IMF6. The results are shown in
Figure 23a and
Table 6.
Then, the impacts contained in the reconstruction signal of IMF1~IMF6 were extracted by MOMEDA. The envelope spectrum of the impacts was compared with that obtained by the proposed method, as shown in
Figure 23b.
Compared with the proposed method, the results of the method based on EEMD, and correlation coefficient were not good, the envelope spectrum was affected by many interference frequencies and the characteristic frequencies of high-frequency bands were almost submerged by irrelevant components. The effective IMFs were selected by the correlation coefficient in the method, and those IMFs which had a strong correlation with the original signal were included in the reconstructed signal. Therefore, interference noises and fault signals may be included in the reconstructed signal. In addition, EEMD is time-consuming, and the selection of the correlation threshold is based on experience, which leads to a lack of adaptability. By introducing the energy kurtosis weighted index, the proposed method considered the signal strength and fault impact characteristics of the IMF synthetically. Meanwhile, the mean of the energy kurtosis weighted indices of all IMFs was used as the threshold. The determination of the threshold was adaptive, and the results show that energy kurtosis mean filtering was more effective than the correlation coefficient method.
5.3. Comparative Analysis of Feature Extraction Methods Based on Different Deconvolution Methods
In the third experiment, the influence of different deconvolution methods on the results was studied. Firstly, the rolling element signal was decomposed by FCEEMD. Then, the effective IMFs were selected by energy kurtosis mean filtering. Finally, the impacts contained in the reconstructed signals were extracted by MED, MCKD and MOMEDA, respectively. The filter length and iteration number of MED and MCKD were 500 and 30, respectively, and the period of the MCKD was Tb = fs/fb = 12,000/141.1693 = 85.004 [
21]; the number of iterations was 30. The time domain diagram and envelope spectrum of the impact signals obtained by the three methods are shown in
Figure 24a,b.
The impact signal extracted by MED contained only one impact, which led to the loss of the periodic impacts. Therefore, the fault frequency of the rolling element was submerged in the interference frequencies, and the fault could not be identified. The impact signal extracted by MCKD contained a series of impacts, but these impacts did not have continuous periodicity. Moreover, the envelope spectrum obtained by MCKD contained a lot of interference frequencies, which affected the results. The impact signal extracted by MOMEDA was one of the periodic impacts, and the envelope spectrum contained many clear spectrum peaks. Therefore, MOMEDA can extract the periodic impacts of the reconstructed signal more effectively compared with MED and MCKD. Through the analysis above, the superiority of the proposed method was verified.
5.4. Noise Robustness Analysis of Feature Extraction Method
In the fourth experiment, we analyzed the feature extraction performance of the method under different noise levels. First, four levels of Gaussian white noise with signal-to-noise ratio (SNR) of 10 dB, 15 dB, 20 dB, and 25 dB were added to the rolling element vibration signal, respectively, and four rolling element signals with different degrees of noise pollution were obtained. The time-domain and frequency-domain waveforms of four rolling element signals with different noise levels are shown in
Figure 25. Many irregular points and burrs were added to both the time and frequency domain waveforms, and the difficulty of extracting fault feature frequencies was also increased.
In order to verify the noise robustness of the proposed method, we analyzed the rolling element vibration signal under different levels of noise by the proposed method. The feature extraction results are shown in
Figure 26. Overall, the envelope curves obtained by feature extraction at four different noise levels were very clear, with very few noise points and burrs. In addition, the rolling element faults characteristic frequencies, and their high multipliers were very obvious under four different noise levels, and the types of rolling element faults were accurately identified. Therefore, under different noise levels, the proposed fault feature extraction method can effectively extract the rolling element fault feature frequency. Our experimental results show that the proposed feature extraction method has good noise robustness.
5.5. Comparison of the Obtained Results with Literature
Similar to the fault feature extraction results listed in reference [
41], it is particularly important to compare the results obtained from different literature.
Table 7 shows the studies on bearing fault feature extraction. Very few metrics can be used to evaluate the quality of the envelope demodulation effect, so we qualitatively classified the envelope demodulation effect into “very obvious”, “obvious” and “general” according to the envelope waveform. In all the literature, the method we proposed achieved good results, and the envelope demodulation result was defined as “very obvious”. As can be seen from
Table 7, the proposed method was more successful than methods in other pieces of literature.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}