1. Introduction
Nowadays, electric vehicles (EVs) are one of the most promising innovations of green transportation; they share a part of the growing private vehicle sales market because of their low operating costs and great government supports [
1,
2]. For example, China had the world’s largest EV market and, from the year 2014 to 2018, its EV sales increased from 45,048 to 983,740, which grew at a rate of about 116% each year on average [
3]. One critical reason for this development is that the operating cost of EVs is much lower than that of gasoline vehicles (GVs), especially in the urban traffic environment [
4]. Moreover, governments in many cities around the world provide subsidies to eliminate the price difference between EVs and GVs [
5]. Plenty of studies have presented that the EV subsidy scheme strongly improves EVs’ cost competitiveness and encourages EV purchasing [
6,
7,
8,
9]. Moreover, because an urban commuting distance is usually less than the EVs’ range and because commuters can use home and workplace charging piles [
10], EVs are favored by urban commuters [
11,
12,
13]; these facts make EVs more attractive in cities.
Analyzing urban EV adoption not only helps with the management of the private vehicle sales market but also assists the estimation of urban transportation-related environmental costs. However, there are several difficulties in analyzing urban vehicle choice. First of all, users from different cities may have different attitudes towards EVs. Secondly, the urban transportation network is a complex system; different network structures and traffic congestion may affect people’s vehicle choices. Last but not least, the function of quantifying the operating cost of EVs at the network level has not been unified. This paper thus focuses on removing these obstacles and analyzing urban users’ vehicle choices between EVs and GVs.
1.1. Literature Review
There have been several works that have focused on the analysis of users’ vehicle choice and EV adoption [
5,
14,
15,
16]. For example, Luo et al. [
14] proposed a grey prediction model to predict EV adoption using national statistical EV adoption history data but obtained a more optimistic result than the reality in the year 2020. Li et al. [
15] predicted EV adoption by using civilian car ownership history data. The authors compared the performance of the two most commonly used models, the Gompertz and logit models, and found that the Gompertz model also obtained more optimistic results than the logit model. These studies only considered ownership history data rather than the factors that influence users’ vehicle choices. However, Lane and Potter [
16] found that both the economic environment and users’ psychological factors, including attitudes, lifestyle, personality, and self-image, greatly affect users’ vehicle choices, especially with respect to EVs. On the one hand, Dumortier et al. [
17] and Hagman et al. [
5] explored a consumer-centric total cost of ownership (TCO) model and verified that the economic environment affects users’ vehicle choice the most; they also found that most governments provided subsidies to eliminate the price difference between EVs and GVs, which highlighted the advantage of the EVs’ low operating costs. On the other hand, logit models have often been used in users’ choice behavior to consider their psychological factors (e.g., [
18,
19,
20,
21,
22,
23]). Operating costs and psychological factors are both network-related factors that are often respectively affected by traffic congestion and network characteristics; however, to the best of our knowledge, few works have simultaneously considered them at the network level to analyze urban users’ vehicle choices because of the complexity of the urban transportation network.
Because the operating cost of vehicles is critical to vehicle choice, many works have been studied the operating cost. For example, Greene et al. and Xu et al. [
24,
25] found that the operating cost of EVs is much lower than that of GVs, which makes EVs more competitive. Chu et al. [
26] investigated the psychological and behavioral factors affecting EV adoption among the largest EV markets, China and Korea, and found that minimizing the operating cost is one of the most important determinants for adopters. However, most of these works only considered the performance of individual vehicles rather than their performance in urban transportation networks. Mansour et al. [
27] conducted a travel survey to assess the operating costs of EVs for typical home-to-work commutes under the peak and off-peak traffic conditions and found that congested traffic can significantly reduce the performance of EVs and, in turn, affect users’ vehicle choices. Their results confirmed that vehicles’ operating costs are greatly related to the traffic congestion, which varies among specific urban transportation networks. Therefore, to analyze citizens’ vehicle choices at the network level, a network-related operating cost function must be considered.
1.2. Objectives and Contributions
This study closes the above research gaps by proposing a logit-based choice model that incorporates the network-related operating cost functions of EVs and GVs. The main contributions of this study are three-fold:
We propose a logit-based choice model for urban vehicle choices. Urban users’ psychological factors are considered by using the logit-based choice model. As aforementioned, because governments provide subsidies to eliminate the price difference between EVs and GVs, the proposed model pays attention to the operating costs of vehicles to fully consider the economic environment. The question of how to estimate EV adoption by considering operating costs and psychological factors will be answered.
Because vehicles’ operating costs are network-related, we have proposed network-related operating cost functions for EVs and GVs; the proposed functions consider specific factors such as vehicle type, travel distance, and traffic congestion. By using the proposed network-related functions, the characteristics and complexity of specific urban transportation networks are considered, which allows for the proposed logit-based model to estimate vehicle choices for different cities.
Numerical experiments were conducted to assess the proposed method. We used sensitivity analyses to provide practical insights into urban vehicle adoption among different cities. The results suggest that urban vehicle adoption is network-related and that both the users’ psychological factors and urban transportation network characteristics greatly affect the vehicle choices.
The remainder of this paper is organized as follows.
Section 2 introduces the problem statement.
Section 3 formulates a logit-based choice model that incorporates network-related vehicle operating cost functions to forecast urban users’ vehicle choices.
Section 4 provides numerical experiments to assess the proposed method and provide some insights.
Section 5 concludes this study and provides future research directions.
2. Problem Statements
Because of the development of the EV industry and because governments have been promoting the vehicles, the gap between the purchase costs of EVs and gasoline vehicles (GVs) is rapidly narrowing [
2,
28,
29]; with the increase in EV penetration into the market and the progression of battery technology, there is a bright prospect that this gap will disappear very soon. Moreover, much evidence has suggested that the impact of the EV purchase price on users’ purchase intentions is decreasing [
3,
30,
31]. Compared with the purchase prices, urban users are more concerned about vehicles’ operating costs, range, and reliability when choosing EVs or GVs [
4,
32,
33]. Because EVs’ range and reliability are quickly increasing, the anxiety about their range and reliability is now being eased. Moreover, most EVs can travel hundreds of kilometers after being fully charged; thus, nowadays, urban commuters do not need to consider the driving range [
34]. Research on charging behavior has indicated that EV owners in cities tend to charge for a long period before or after traveling; for example, commuters usually charge in parking lots near their residence and workplaces [
35,
36]. Thus, it is reasonable to assume that during the intra-urban travel, travelers hardly care about the distribution of charging stations on the road that they pass. Therefore, especially in urban transportation networks, the impact of purchase costs and range anxiety on travelers’ choice between GVs and EVs will gradually decrease. These weakening influential factors highlight the advantage of using EVs to save operating costs. Due to the much lower energy consumption of EVs compared with that of GVs, EV users will save a large number of operating costs, which will make EVs more competitive in the future [
37].
Table 1 illustrates a comparison between the energy consumption of EVs and GVs [
38].
According to
Table 1, we observe that an EV saves almost one-half of a GV’s energy consumption. In addition to the energy consumption difference, the difference in energy prices also makes the operating cost of EVs much cheaper than that of GVs. Based on the electricity rate and price of gasoline including taxes in effect on 1 April 2021, i.e.,
$0.10932/
and
$1.5/
,
Table 2 lists the average unit electricity and gasoline consumption (of the users) of an EV and a GV [
39], respectively, as well as their average unit operating costs.
From
Table 2 we can see that the average unit operating cost of a GV is more than 6.5 times that of an EV, which makes the operating cost a key factor that affects users’ choices in electric or gasoline vehicles (consistent with Heyvaert et al. [
33]). However,
Table 2 only illustrates average unit operating costs and does not consider the scale effect. Specifically, the operating costs of EVs and GVs could vary among different urban transportation networks as network-related factors would affect the operating costs. For example, although EVs and GVs have the same travel time in a mixed traffic flow, traffic congestion of different degrees may lead to different energy consumption and operating costs for EVs and GVs [
40]. Moreover, in addition to the operating cost, which is an observed attribute, the unobserved attributes should also be considered when we describe users’ choice behavior. For example, users in different cities may hold different attitudes regarding the operating costs and vehicle choices. Thus, we further investigated the network-related factors of the vehicle operating costs, defined a network-related operating cost function, and proposed a logit-based choice model to describe the users’ choice behavior in the next section.
3. Research Methodology
In this section, we propose a network-related operating cost function for each vehicle type and a logit-based choice model for the users’ vehicle choice behavior.
3.1. Network-Related Operating Cost Function
Different from the average unit operating cost listed in
Table 2, the network-related operating cost considers the scale effects of specific urban transportation networks. Specifically, the length and travel time of the users’ travel paths, which connect their origin and destination (OD) pairs, need to be considered. Thus, we defined a network-related operating cost function with the EVs and GVs separated. According to Yang et al. [
41] and Ma et al. [
42], the average electricity (
) and fuel (
) consumption of an individual EV and GV, respectively, can be calculated by
and
where
denotes the average travel speed
of vehicles;
denotes the travel distance
; and
denotes the travel time
. Both
and
are network-related factors that vary among different urban transportation networks, and the average travel time is
. Note that we do not necessarily calculate the energy consumption through Equations (1) and (2). We only employ them here for illustration purposes, as they are classic and representative enough; other suitable energy consumption functions, if there are any, can also be used in practice. This study aims to provide a framework to effectively forecast the urban EV adoption based on operating costs. The framework should be applicable to any reasonable energy consumption function.
Considering the electricity and gasoline rates and the equation
, we defined a network-related operating cost function for each vehicle type as follows:
and
where
and
denote the electricity (
$) and gasoline rates
(), respectively.
In practice, the travel distance
is usually determined by traffic engineering survey methods, e.g., the floating car method [
43,
44]. Specifically, a floating car, i.e., a vehicle driven by the surveyor, travels at a fixed speed
when no traffic flow is on the paths, referred to as the free-flow condition, while recording its free-flow travel time
. Then, the travel distance
. Therefore, Equations (3) and (4) can be also written as
and
where
denotes the free-flow speed (
) and
denotes the free-flow travel time (
). For example, if we let
,
,
, and
, we curve the network-related operating cost functions of the EV and GV, as shown in
Figure 1.
Figure 1 suggests that the operating costs of an EV and GV vary with respect to the travel time
. It can be seen that the operating cost of an EV is always lower than that of a GV in this example. According to Equations (5) and (6), we observe that the only variable of the proposed network-related operating cost functions is the travel time
, which varies according to the traffic flow condition of the specific urban transportation networks. That is, if we can determine the travel time
of each road link, we can, in turn, determine the operating costs of both the EV and GV. Next, we employ a well-known technique in the field of transportation engineering referred to as the traffic assignment problem (TAP) to forecast the traffic flow and travel time.
3.2. Network Traffic Flow and Travel Time
The traffic assignment problem (TAP) is a well-developed technique used to forecast the traffic flow and travel time of urban transportation networks. Many works [
45,
46,
47] have aimed to complete TAPs to forecast the traffic flow and travel time at the network level. Here, we employ a stochastic user equilibrium (SUE)-based TAP, which fully considers the stochasticity of travelers’ perception on their travel time, to forecast the traffic flow and travel time. We consider an urban transportation network
where
denotes the set of nodes and
denotes the set of links. Let
denote the origin and destination (OD) pair and
and
denote the paths and travel demand between OD pair
, respectively. The SUE-based TAP is given as follows:
where
is the traffic flow on the path
, referred to as the path flow, which connects the origin and destination (OD) pair
;
is the travel time function with respect to the path flow; and
is a scale parameter indicating the degree of travelers’ perception error on their travel time. The larger
is, the more accurately travelers perceive their travel time, i.e., travelers are more sensitive to the travel time. As aforementioned, because the EVs’ range completely satisfies the users’ commuting demand in the urban traffic environment, the range anxiety is not necessarily considered.
The above TAP formulation is a strictly convex mathematical programming formula whose solution can be efficiently solved using many algorithms, including the Frank-Wolfe algorithm [
48] and the method of successive average [
49,
50,
51]; both are widely used.
3.3. Logit-Based Choice Model
Based on the above proposed network-related operating cost functions of EVs and GVs, we are able to propose a logit-based model for the vehicle choice behavior of the users. For example,
Figure 2 illustrates the users’ vehicle choices on one specific travel path between an OD pair. The solid line between the OD pair denotes a specific travel path. The two parallel dash and dot-dash lines denote the EV and GV users on this travel path, respectively.
As aforementioned, the proposed network-related operating cost functions are key factors that affect the users’ vehicle choice behavior. We thus let them be the observed attributes of the utilities of the alternatives EV and GV:
where
and
denote the utilities of choosing an EV and GV, respectively;
is a scale parameter for the vehicle choice utility;
and
denote the network-related operating costs of an EV and GV, respectively;
and
denote the unobserved terms that are assumed to follow an independent and identically distribution (i.i.d.) of extreme value. The unobserved term is also referred to as the “perception error”, which denotes the gap between travelers’ perceived utility and the actual utility. Psychological factors are the principal reason for perception errors. For instance, if a traveler is in a bad mood on a day, they may prefer EVs with lower noise, meaning their perceived utility
may be higher than the actual utility.
Here, we directly apply the conclusion of logit-based models (Section 5.2 of Ben-Akiva and Lerman [
52]) to save space. The proposed logit-based model (8) derives the users’ vehicle choices as follows:
where
denotes the users’ choice of vehicle type
on path
, which connects OD pair
.
According to Equation (9) and the flow conservation constraint, we calculate the amounts of EVs in the entire network by
4. Numerical Experiments
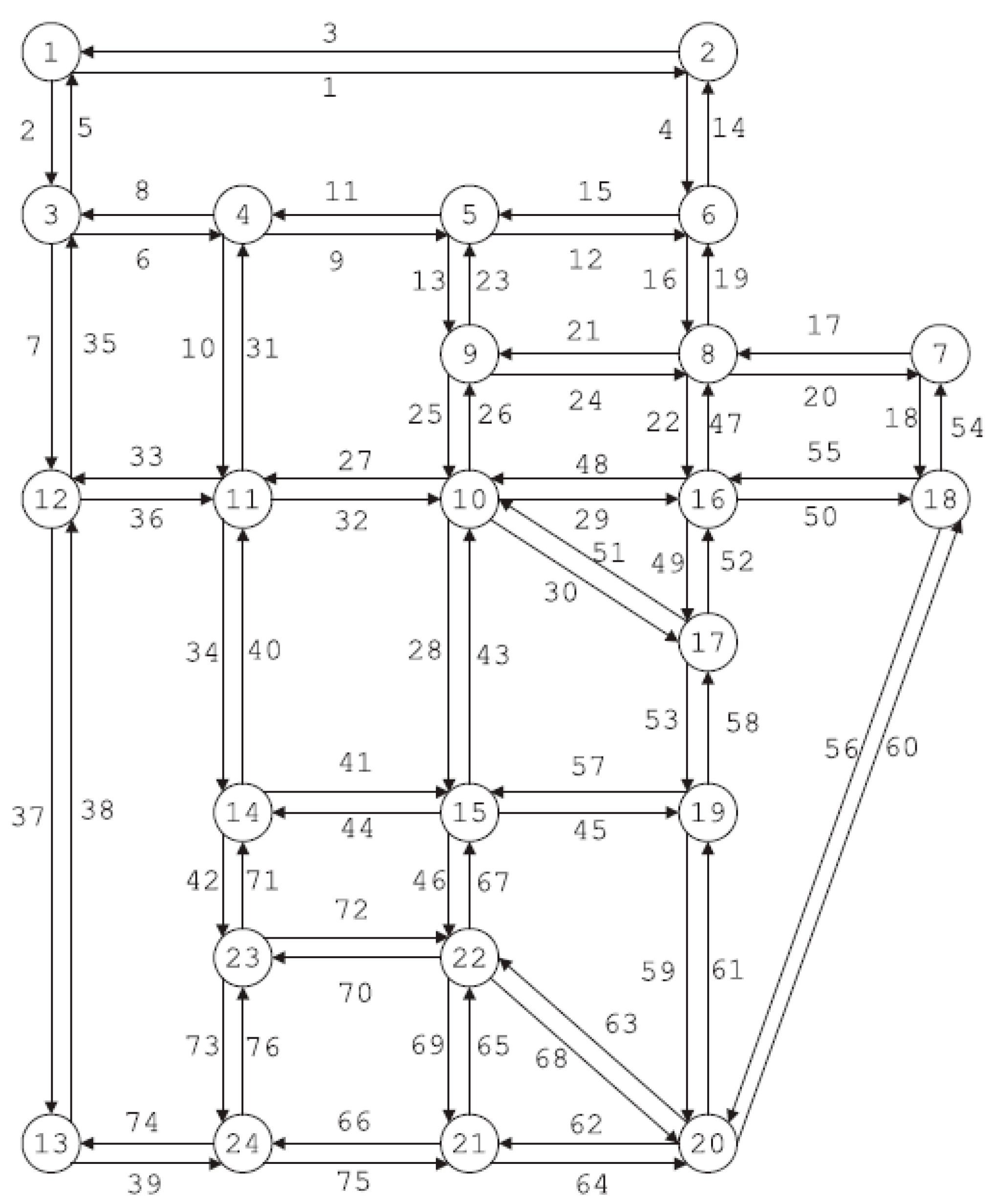
To assess the proposed method, we conduct a numerical experiment by using the classic Sioux Falls urban transportation network as an example. The Sioux Falls network is widely applied in the field of transportation network modeling, and it has 24 nodes, 76 links, and 528 OD pairs; its topology is given in
Figure 3.
The travel time of the links in this network is described by the Bureau of Public Roads (BPR) function [
53]. Therefore, the travel time
and free-flow travel time
of each path are given by
and
where
denotes the free-flow travel time of link
and
is the link/path incidence parameter.
if path
goes through link
; otherwise,
.
denotes the capacity of link
, and the general parameters of
,
are set. The specific values of
,
, and travel demand
are given in Bar-Gera [
54]. The network-related operating costs of the EVs and GVs on each path are respectively given by
and
According to many studies [
47,
55,
56], although the total number of paths between all of the OD pairs in a large-scale network may be very large, the commuters usually use only the 5–10 shortest paths between each OD pair. Thus, w use the k shortest path algorithm [
57,
58] to generate 10 paths for each OD pair. The link/path incidence parameter
can be seen in Ma [
59]; other parameters are listed in
Table 3.
We solve the traffic assignment problem by using the method of successive average [
49,
60] to obtain the travel time
of each path in the Sioux Falls network. Then, the operating costs of the EVs and GVs on each path are calculated by using Equations (13) and (14). The operating costs of an EV and GV over the entire network are shown in
Figure 4.
Figure 4 suggests that the operating costs of the EVs over the entire network are much lower than those of the GVs, which is strong evidence supporting that EVs are much more environmentally friendly than GVs. According to the users’ vehicle choices (9) and Equation (10), we calculate and list the forecasted amounts of EVs and GVs in
Table 4.
Table 4 suggests that, when we consider the vehicle operating costs of a specific network, the forecasted amount of EVs will be larger than that of GVs. This is because the average operating cost of an EV over paths is lower than that of a GV. Note that this result is based on the current preset parameters and travel demand level, which are both network characteristics. Next, we conduct sensitivity analyses on the parameters and travel demand to provide some practical insights into the EV adoption with different urban transportation network characteristics.
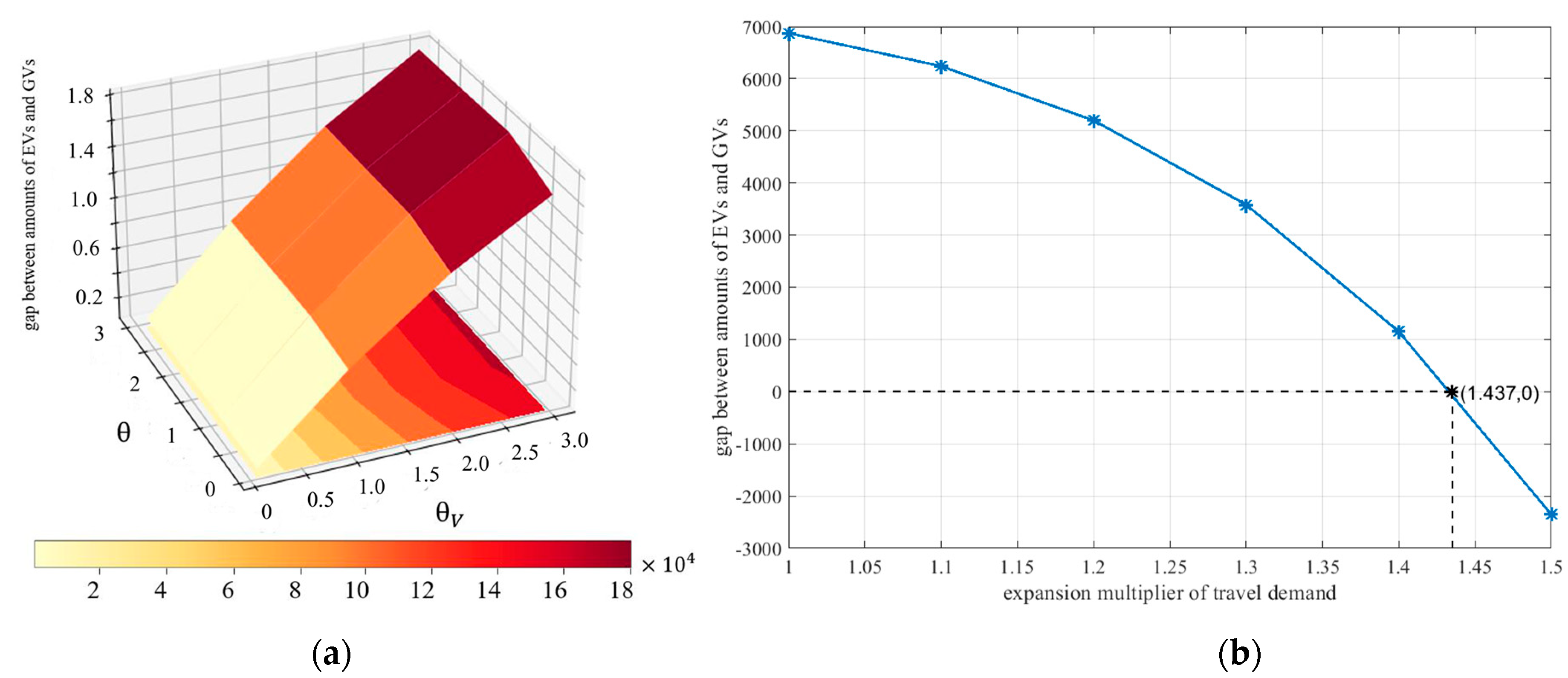
Figure 5 shows the results of the sensitivity analyses.
Figure 5a illustrates the gap between the amounts of EVs and GVs with respect to the parameters
and
; it suggests that, along with the increase in both parameters, the gap between the amounts increases. Moreover, the parameter
has a greater impact on the users’ vehicle choices than
.
Figure 5b shows the gap between the amounts of EVs and GVs with respect to the changes in travel demand. Along with the increase in travel demand, the gap becomes lower, namely, the proportion of users who choose EVs decreases.
Figure 5a,b both suggest that the users’ vehicle choices are with respect to network characteristics. The parameters of choice behavior and the degree of traffic congestion both have significant impacts on users’ vehicle choices. This fact reflects the necessity of investigating vehicle choices from the perspective of networks.
5. Conclusions
This study analyzed urban users’ vehicle choices and EV adoption by proposing a logit-based choice model and considering vehicle operating costs. The considered operating cost functions for EVs and GVs were separately proposed; both functions consider network characteristics and depend on the traffic environment of the specific urban transportation networks. An SUE-based TAP model, which fully considers the travelers’ perception error on the travel time when they make travel decisions, was employed to determine the traffic flow and, in turn, the users’ travel time in the networks. The employed SUE-based TAP model is well developed in the research field of urban transportation networks and thus can be efficiently solved by many algorithms. We conducted a numerical experiment to verify the proposed methodology and to provide some practical insights into vehicle adoption and urban traffic management. The experiment results suggest that the network traffic environment, such as the traffic flow, travel time, and travel demand, significantly affect users’ vehicle choices. The more congested the network is, the less that users will choose EVs.
Though some contributions have been made, there are still several barriers and limitations to this study. Firstly, we neglected the possible uncertainty of travelers’ route choice behaviors and the elasticity of travel demand. Secondly, for illustration, we set common values for the scale parameters of the TAP and vehicle choice models. Lastly, the operating costs may involve other influencing factors besides the traffic condition.
In the future, studies can be performed to extend the proposed methodology and to provide additional insights. Future challenges may include the following aspects: (i) the consideration of travelers’ route choice uncertainty in TAP; (ii) the consideration of elastic travel demand in urban transportation networks; (iii) the calibration of the scale parameters of the TAP and vehicle choice models; and (iv) the investigation, estimation, and prediction of the operating costs of EVs and GVs.
6. Patents
Jie Ma et al. An urban electric vehicle adoption forecasting method in the context of low-carbon travel [Patent], 202210475756.6, 2 May 2022.
Author Contributions
Conceptualization, J.M. and D.C.; methodology, J.M.; software, J.M.; validation, D.C. and Y.Z.; formal analysis, Y.Z. and C.Z.; investigation, M.S.; data curation, H.Z.; writing—original draft preparation, J.M. and J.C.; visualization, C.Z. and K.Z.; supervision, D.C.; funding acquisition, J.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Ministry of Education of the People’s Republic of China Humanities and Social Sciences Youth Foundation (grant number 22YJCZH123), the Natural Science Foundation of Jiangsu Province (grant number BK20220846), the China Postdoctoral Science Foundation (grant numbers 2021M690614 and 2021T140112), and the Transportation Science and Technology Project of Henan Province (grant number 2022-2-2).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data can be shared by request.
Acknowledgments
The authors would like to thank the students from the School of Transportation, Southeast University for their help in collecting the data required for this study.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yu, Z.; Li, S.; Tong, L. Market Dynamics and Indirect Network Effects in Electric Vehicle Diffusion. Transp. Res. Part D Transp. Environ. 2016, 47, 336–356. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Wang, H.; Meng, Q. Optimal Purchase Subsidy Design for Human-Driven Electric Vehicles and Autonomous Electric Vehicles. Transp. Res. Part C 2020, 116, 102641. [Google Scholar] [CrossRef]
- Dong, X.; Zhang, B.; Wang, B.; Wang, Z. Urban Households’ Purchase Intentions for Pure Electric Vehicles under Subsidy Contexts in China: Do Cost Factors Matter? Transp. Res. Part A Policy Pract. 2020, 135, 183–197. [Google Scholar] [CrossRef]
- Higueras-castillo, E.; Guillén, A.; Herrera, L. Adoption of Electric Vehicles: Which Factors Are Really Important? Int. J. Sustain. Transp. 2021, 15, 799–813. [Google Scholar] [CrossRef]
- Hagman, J.; Ritzén, S.; Stier, J.J.; Susilo, Y. Total Cost of Ownership and Its Potential Implications for Battery Electric Vehicle Diffusion. Res. Transp. Bus. Manag. 2016, 18, 11–17. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Gong, J.; Greenwood, B.N.; Song, Y. The Effect of Early Electric Vehicle Subsidies on the Automobile Market. J. Public Mark. 2023, 42, 169–186. [Google Scholar] [CrossRef]
- Li, K.; Wang, L. Optimal Electric Vehicle Subsidy and Pricing Decisions with Consideration of EV Anxiety and EV Preference in Green and Non-Green Consumers. Transp. Res. Part E Logist. Transp. Rev. 2023, 170, 103010. [Google Scholar] [CrossRef]
- Hao, H.; Ou, X.; Du, J.; Wang, H.; Ouyang, M. China’s Electric Vehicle Subsidy Scheme: Rationale and Impacts. Energy Policy 2014, 73, 722–732. [Google Scholar] [CrossRef]
- Thorne, Z.; Hughes, L. Evaluating the Effectiveness of Electric Vehicle Subsidies in Canada. Procedia Comput. Sci. 2019, 155, 519–526. [Google Scholar] [CrossRef]
- Rotaris, L.; Giansoldati, M.; Scorrano, M. The Slow Uptake of Electric Cars in Italy and Slovenia. Evidence from a Stated-Preference Survey and the Role of Knowledge and Environmental Awareness. Transp. Res. Part A Policy Pract. 2021, 144, 1–18. [Google Scholar] [CrossRef]
- Hackbarth, A.; Madlener, R. Consumer Preferences for Alternative Fuel Vehicles: A Discrete Choice Analysis. Transp. Res. Part D Transp. Environ. 2013, 25, 5–17. [Google Scholar] [CrossRef] [Green Version]
- Weiss, M.; Dekker, P.; Moro, A.; Scholz, H.; Patel, M.K. On the Electrification of Road Transportation—A Review of the Environmental, Economic, and Social Performance of Electric Two-Wheelers. Transp. Res. Part D Transp. Environ. 2015, 41, 348–366. [Google Scholar] [CrossRef]
- Mirhedayatian, S.M.; Yan, S. A Framework to Evaluate Policy Options for Supporting Electric Vehicles in Urban Freight Transport. Transp. Res. Part D Transp. Environ. 2018, 58, 22–38. [Google Scholar] [CrossRef]
- Luo, H.; Ruan, J.; Li, F. Study on the Electric Vehicles Ownership and Planning for the Construction of Charging Infrastructure. In Proceedings of the Asia-Pacific Power and Energy Engineering Conference (APPEEC), Wuhan, China, 25–28 March 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Li, X.; Wang, E.; Zhang, C. Prediction of Electric Vehicle Ownership Based on Gompertz Model. In Proceedings of the 2014 IEEE International Conference in Information and Automation (ICIA), Hailar, China, 28–30 July 2014; pp. 87–91. [Google Scholar] [CrossRef]
- Lane, B.; Potter, S. The Adoption of Cleaner Vehicles in the UK: Exploring the Consumer Attitude-Action Gap. J. Clean. Prod. 2007, 15, 1085–1092. [Google Scholar] [CrossRef]
- Dumortier, J.; Siddiki, S.; Carley, S.; Cisney, J.; Krause, R.M.; Lane, B.W.; Rupp, J.A.; Graham, J.D. Effects of Providing Total Cost of Ownership Information on Consumers ’ Intent to Purchase a Hybrid or Plug-in Electric Vehicle. Transp. Res. Part A Policy Pract. 2015, 72, 71–86. [Google Scholar] [CrossRef] [Green Version]
- Zhou, F.; Zheng, Z.; Whitehead, J.; Perrons, R.K.; Washington, S.; Page, L. Examining the Impact of Car-Sharing on Private Vehicle Ownership. Transp. Res. Part A Policy Pract. 2020, 138, 322–341. [Google Scholar] [CrossRef]
- Wang, K.; Salehin, M.F.; Habib, K.N. A Discrete Choice Experiment on Consumer’s Willingness-to-Pay for Vehicle Automation in the Greater Toronto Area. Transp. Res. Part A Policy Pract. 2021, 149, 12–30. [Google Scholar] [CrossRef]
- Liu, Y.; Cirillo, C. A Generalized Dynamic Discrete Choice Model for Green Vehicle Adoption. Transp. Res. Part A Policy Pract. 2018, 114, 288–302. [Google Scholar] [CrossRef]
- Jin, F.; An, K.; Yao, E. Mode Choice Analysis in Urban Transport with Shared Battery Electric Vehicles: A Stated-Preference Case Study in Beijing, China. Transp. Res. Part A Policy Pract. 2020, 133, 95–108. [Google Scholar] [CrossRef]
- Qian, L.; Grisolía, J.M.; Soopramanien, D. The Impact of Service and Government-Policy Attributes on Consumer Preferences for Electric Vehicles in China. Transp. Res. Part A Policy Pract. 2019, 122, 70–84. [Google Scholar] [CrossRef] [Green Version]
- Hackbarth, A.; Madlener, R. Willingness-to-Pay for Alternative Fuel Vehicle Characteristics: A Stated Choice Study for Germany. Transp. Res. Part A Policy Pract. 2016, 85, 89–111. [Google Scholar] [CrossRef]
- Xu, X.; Aziz, H.M.A.; Guensler, R. A Modal-Based Approach for Estimating Electric Vehicle Energy Consumption in Transportation Networks. Transp. Res. Part D Transp. Environ. 2019, 75, 249–264. [Google Scholar] [CrossRef]
- Greene, D.; Hossain, A.; Hofmann, J.; Helfand, G.; Beach, R. Consumer Willingness to Pay for Vehicle Attributes: What Do We Know? Transp. Res. Part A Policy Pract. 2018, 118, 258–279. [Google Scholar] [CrossRef] [PubMed]
- Chu, W.; Im, M.; Song, M.R.; Park, J. Psychological and Behavioral Factors Affecting Electric Vehicle Adoption and Satisfaction: A Comparative Study of Early Adopters in China and Korea. Transp. Res. Part D Transp. Environ. 2019, 76, 1–18. [Google Scholar] [CrossRef]
- Mansour, C.; Haddad, M.; Zgheib, E. Assessing Consumption, Emissions and Costs of Electrified Vehicles under Real Driving Conditions in a Developing Country with an Inadequate Road Transport System. Transp. Res. Part D Transp. Environ. 2018, 63, 498–513. [Google Scholar] [CrossRef]
- Degirmenci, K.; Breitner, M.H. Consumer Purchase Intentions for Electric Vehicles: Is Green More Important than Price and Range? Transp. Res. Part D Transp. Environ. 2017, 51, 250–260. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Wu, T.; Zheng, R.; Guo, X. How Vehicle Market Is Segmented and in Fluenced by Subsidy Policy: A Theoretical Study. Transp. Res. Part A Policy Pract. 2018, 118, 776–782. [Google Scholar] [CrossRef]
- Larson, P.D.; Viáfara, J.; Parsons, R.V.; Elias, A. Consumer Attitudes about Electric Cars: Pricing Analysis and Policy Implications. Transp. Res. Part A Policy Pract. 2015, 69, 299–314. [Google Scholar] [CrossRef]
- Liu, X.; Sun, X.; Zheng, H.; Huang, D. Do Policy Incentives Drive Electric Vehicle Adoption? Evidence from China. Transp. Res. Part A Policy Pract. 2021, 150, 49–62. [Google Scholar] [CrossRef]
- Asadi, S.; Nilashi, M.; Samad, S.; Abdullah, R. Factors Impacting Consumers’ Intention toward Adoption of Electric Vehicles in Malaysia. J. Clean. Prod. 2021, 282, 124474. [Google Scholar] [CrossRef]
- Heyvaert, S.; Coosemans, T.; Van Mierlo, J.; Macharis, C. Electric Vehicle Attitudes and Purchase Intention: A Flemish Case Study. Int. J. Electr. Hybrid Veh. 2015, 7, 83–100. [Google Scholar] [CrossRef]
- De Nunzio, G.; Thibault, L. Energy-Optimal Driving Range Prediction for Electric Vehicles. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017; pp. 1608–1613. [Google Scholar]
- Philipsen, R.; Brell, T.; Brost, W.; Eickels, T.; Ziefle, M. Running on Empty—Users’ Charging Behavior of Electric Vehicles versus Traditional Refueling. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 475–492. [Google Scholar] [CrossRef]
- Morrissey, P.; Weldon, P.; O’Mahony, M. Future Standard and Fast Charging Infrastructure Planning: An Analysis of Electric Vehicle Charging Behaviour. Energy Policy 2016, 89, 257–270. [Google Scholar] [CrossRef]
- Gao, Y.; Leng, M. Incentivizing the Adoption of Electric Vehicles under Subsidy Schemes: A Duopoly Analysis. Oper. Res. Lett. 2021, 49, 473–476. [Google Scholar] [CrossRef]
- Enci, W.; Song, F.; Xuebin, W.; Xianjuan, P.; Zheng, J.; Yongyou, N. GREET-Based Model for Analyzing Pollutant Emissions Characteristic of New Energy Vehicles. J. Shanghai Univ. 2017, 23, 810–820. [Google Scholar] [CrossRef]
- Natural Resources Canada. Fuel Consumption Guide; Natural Resources Canada: Ottawa, ON, Canada, 2018; pp. 1–39.
- Fiori, C.; Arcidiacono, V.; Fontaras, G.; Makridis, M.; Mattas, K.; Marzano, V.; Thiel, C.; Ciu, B. The Effect of Electri Fi Ed Mobility on the Relationship between Traffic Conditions and Energy Consumption. Transp. Res. Part D Transp. Environ. 2019, 67, 275–290. [Google Scholar] [CrossRef]
- Yang, S.; Deng, C.; Tang, T.; Qian, Y. Electric Vehicle’s Energy Consumption of Car-Following Models. Nonlinear Dyn. 2013, 71, 323–329. [Google Scholar] [CrossRef]
- Ma, J.; Li, D.; Tu, Q.; Du, M.; Jiang, J. Finding Optimal Reconstruction Plans for Separating Trucks and Passenger Vehicles Systems at Urban Intersections Considering Environmental Impacts. Sustain. Cities Soc. 2021, 70, 102888. [Google Scholar] [CrossRef]
- Chen, P.J.; Wang, J.S.; Zhang, Q.; Ji, X.; Wang, J.L. Research on Evaluation and Prediction Method of Link Travel Time Based on Floating Car Data by Simulation Research on Evaluation and Prediction Method of Link Travel Time Based on Floating Car Data by Simulation. J. Phys. Conf. Ser. 2019, 1168, 032094. [Google Scholar] [CrossRef]
- Dewulf, B.; Neutens, T.; Vanlommel, M.; Logghe, S.; De Maeyer, P.; Witlox, F.; De Weerdt, Y.; Van De Weghe, N. Examining Commuting Patterns Using Floating Car Data and Circular Statistics: Exploring the Use of New Methods and Visualizations to Study Travel Times. J. Transp. Geogr. 2015, 48, 41–51. [Google Scholar] [CrossRef]
- Ma, J.; Li, D.; Cheng, L.; Lou, X.; Sun, C.; Tang, W. Link Restriction: Methods of Testing and Avoiding Braess Paradox in Networks Considering Traffic Demands. J. Transp. Eng. Part A Syst. 2018, 144, 04017076. [Google Scholar] [CrossRef]
- Ma, J.; Cheng, L.; Li, D. Road Maintenance Optimization Model Based on Dynamic Programming in Urban Traffic Network. J. Adv. Transp. 2018, 2018, 1–11. [Google Scholar] [CrossRef]
- Ma, J.; Xu, M.; Meng, Q.; Cheng, L. Ridesharing User Equilibrium Problem under OD-Based Surge Pricing Strategy. Transp. Res. Part B Methodol. 2020, 134, 1–24. [Google Scholar] [CrossRef]
- Sheffi, Y. Urban Transportation Network; Prentice-Hall: Hoboken, NJ, USA, 1985; ISBN 0139397299. [Google Scholar]
- Ma, J.; Wang, H.; Tang, T. Stochastic Electric Vehicle Network with Elastic Demand and Environmental Costs. J. Adv. Transp. 2020, 2020, 1–11. [Google Scholar] [CrossRef]
- Liu, H.X.; He, X.; He, B. Method of Successive Weighted Averages (MSWA) and Self-Regulated Averaging Schemes for Solving Stochastic User Equilibrium Problem. Netw. Spat. Econ. 2009, 9, 485–503. [Google Scholar] [CrossRef]
- Jing, W.; Kim, I.; Ramezani, M.; Liu, Z. Stochastic Traffic Assignment of Mixed Electric Vehicle and Gasoline Vehicle Flow with Path Distance Constraints. Transp. Res. Procedia 2017, 21, 65–78. [Google Scholar] [CrossRef]
- Ben-Akiva, M.; Lerman, S.R. Discrete Choice Analysis: Theory and Application to Travel Demand; Routledge: Cambridge, MA, USA; London, UK, 2008; ISBN 0262022176. [Google Scholar]
- Wong, W.; Wong, S.C. Network Topological Effects on the Macroscopic Bureau of Public Roads Function. Transp. A Transp. Sci. 2016, 12, 272–296. [Google Scholar] [CrossRef] [Green Version]
- Bar-Gera, H. Transportation Networks for Research. Available online: https://github.com/bstabler/TransportationNetworks (accessed on 1 March 2023).
- Chen, X.; Liu, Z.; Zhang, K.; Wang, Z. A Parallel Computing Approach to Solve Traffic Assignment Using Path-Based Gradient Projection Algorithm. Transp. Res. Part C 2020, 120, 102809. [Google Scholar] [CrossRef]
- Leventhal, T.; Nemhauser, G.; Trotter, L. Column Generation Algorithm for Optimal Traffic Assignment. Transp. Sci. 1973, 7, 168–176. [Google Scholar] [CrossRef]
- Yen, J.Y. Finding the K Shortest Loopless Paths in a Network. Manag. Sci. 1971, 17, 712–716. [Google Scholar] [CrossRef]
- Relund, L.; Allan, K.; Pretolani, D. Finding the K Shortest Hyperpaths. Comput. Oper. Res. 2005, 32, 1477–1497. [Google Scholar] [CrossRef]
- Ma, J. Transportation Networks. Available online: https://github.com/majie9001/TenPathsForSiouxFalls (accessed on 13 November 2021).
- Ma, J.; Cheng, L.; Li, D.; Tu, Q. Stochastic Electric Vehicle Network Considering Environmental Costs. Sustainability 2018, 10, 2888. [Google Scholar] [CrossRef] [Green Version]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}