

A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs)

 , , , , and
, , , , and
Abstract
:1. Introduction
- A comprehensive collection of relevant references related to the drone field, serving as a reliable and accessible source for researchers in this domain.
- Insights and predictions established through a rigorous scientific approach regarding the most active and rapidly expanding research directions in the UAV field over the past three years. The analysis is based on growth rate per year and acceleration, supported by robust evidence.
- Identification of potential UAV open development axes, offering valuable insights and ideas for future research directions. A systematic address of the consideration for the appropriate control algorithm of UAVs, providing an in-depth analysis of this critical aspect of UAV research.
- An overview of high-level UAV development software achieved through a systematic classification process, serving as an accessible guide to the available options in this area of UAV research.
- A rigorous extraction of the most prominent research directions in the UAV domain over the past three years, employing a scientifically sound methodology for a comprehensive understanding of the current state-of-the-art in UAV research.
- Presentation of a numerical analysis of the interrelationships among UAV research directions, offering clear insights into the current landscape of UAV research, facilitating the effective charting of future UAV research efforts.
2. Popular UAV Classification in Research
- Flying principle: This category includes fixed-wing, rotary-wing, hybrid, flapping-wing, and other types of UAVs that differ in their flying mechanism.
- Mission: UAVs can be classified based on their mission, such as reconnaissance, surveillance, attack, transport, search and rescue, and more.
- Weight: UAVs can be classified based on their weight, such as micro-UAVs, small UAVs, tactical UAVs, medium-altitude-long-endurance (MALE) UAVs, high-altitude-long-endurance (HALE) UAVs, and more.
- Propulsion: UAVs can be powered by electric, fuel, solar, or other sources.
- Control: UAVs can be remotely piloted, autonomous, semi-autonomous, or have other types of control.
- Altitude range: UAVs can be classified based on their altitude range, such as low-altitude UAVs, high-altitude UAVs, and stratospheric UAVs.
- Configuration: UAVs can have different configurations, such as mono-rotor, multi-rotor, tilt-rotor, tilt-wing, and others.
- Purpose: UAVs can have different purposes, such as military, civilian, commercial, industrial, scientific, and more.
- Launch method: UAVs can be launched from the ground, air, sea, or have other types of launch methods.
- Payload: UAVs can carry various payloads, such as sensors, cameras, communication systems, weapons, cargo, and others.
- Autonomy level: UAVs can have different levels of autonomy, such as fully autonomous, semi-autonomous, human-operated, and others.
- Size: UAVs can have different sizes, such as mini-UAVs, handheld UAVs, man-portable UAVs, vehicle-mounted UAVs, and more.
- Endurance: UAVs can have different endurance levels, such as short-endurance UAVs, long-endurance UAVs, ultra-long-endurance UAVs, and more.
- Range: UAVs can have different range levels, such as short-range UAVs, intermediate-range UAVs, long-range UAVs, and more.
3. Navigating the Latest UAV Research Challenges
3.1. Communication and Antennas
3.2. IoTs
3.3. Aircraft Detection
3.4. Control and Autonomous Flight
3.5. Perception and Sensing
3.6. Energy-Efficient Flight
3.7. Human–UAV Interaction
3.8. Swarm Behavior
3.9. AI
4. Active and Expanding UAV Research Directions
5. Potentially Open Research Directions for UAVs
5.1. Integration of AI
Generative AI and ChatGPT for UAVs
5.2. Environmental Monitoring and Conservation
5.3. Urban Air Mobility (UAM)
5.4. Miniaturization
5.5. Swarming and Cooperative Control
5.6. Beyond Visual Line-of-Sight (BVLOS) Operations
5.7. Long-Range and High-Altitude Flights
5.8. Flight Safety
5.9. UAV Suspension Payload Capabilities
5.10. Transformability or Convertibility
6. Advancements in Aircraft Control: An Overview of the Development Axes
6.1. Classical Control
6.2. Modern Control
6.3. Intelligent Control
6.4. Adaptive Control
6.5. Pushing the Boundaries of UAV Control: Exploring Advanced Techniques
6.6. Considerations for Selecting an Appropriate Control Algorithm
- Stability and control: The algorithm should ensure the UAV’s stability and controllability, even under turbulent or challenging conditions.
- Performance: The algorithm should enable the UAV to achieve its performance objectives, such as speed, altitude, and maneuverability while minimizing power consumption and optimizing mission duration.
- Sensitivity to environment: The algorithm should consider environmental factors that can affect the UAV’s performance, such as wind, temperature, and humidity.
- Responsiveness: The algorithm should be capable of responding quickly to changes in the UAV’s mission objectives or unexpected events, such as obstacles or other aircraft.
- Computational requirements: The algorithm should be computationally efficient and feasible for the available onboard processing hardware and software.
- Robustness: The algorithm should be robust to uncertainties, such as sensor noise or errors in the UAV’s kinematic model.
- Safety: The algorithm should ensure that the UAV operates safely and avoids collisions with other objects, people, or animals.
- Regulatory compliance: The algorithm should comply with local regulations and guidelines for UAV operations, such as flight altitude restrictions and flight path limitations.
- Human interaction: The algorithm should enable human operators to interact with the UAV and provide inputs or commands, if necessary.
7. Fundamental Hardware/Software Architectures for UAVs: Applications and Issues
7.1. The Hardware Architecture of UAVs
7.1.1. Flight Computer and Controller
7.1.2. Sensors
7.1.3. Actuators
7.1.4. Battery
7.1.5. Communication Interfaces
7.1.6. Payload
7.1.7. Structural Components
7.2. The Software Architecture for UAVs
7.3. UAV Applications and Main Issues
8. Key Trends: Open Source UAV Software and Hardware Projects
8.1. PX4 Autopilot
8.2. ArduPilot
8.3. TensorFlow for UAV
8.4. Paparazzi UAV
8.5. Ground Control
8.6. AirSim
8.7. JdeRobot UAVs
8.8. DroneKit and DroneKit-Python
8.9. MAVLink
8.10. ROS for UAVs
9. High-Level UAV Development Software and Categorization
9.1. Simulation Software
9.2. Flight Control Software
9.3. Ground Control Software
9.4. Computer Vision Software
9.5. Sensor Integration Software
10. Open Issues and Future Research Directions for UAVs
10.1. Open Issues
10.2. Future Research Directions
11. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Himeur, Y.; Al-Maadeed, S.; Varlamis, I.; Al-Maadeed, N.; Abualsaud, K.; Mohamed, A. Face mask detection in smart cities using deep and transfer learning: Lessons learned from the COVID-19 pandemic. Systems 2023, 11, 107. [Google Scholar]
- Kheddar, H.; Himeur, Y.; Awad, A.I. Deep Transfer Learning Applications in Intrusion Detection Systems: A Comprehensive Review. arXiv 2023, arXiv:2304.10550. [Google Scholar]
- Atalla, S.; Daradkeh, M.; Gawanmeh, A.; Khalil, H.; Mansoor, W.; Miniaoui, S.; Himeur, Y. An Intelligent Recommendation System for Automating Academic Advising Based on Curriculum Analysis and Performance Modeling. Mathematics 2023, 11, 1098. [Google Scholar] [CrossRef]
- Copiaco, A.; Himeur, Y.; Amira, A.; Mansoor, W.; Fadli, F.; Atalla, S.; Sohail, S.S. An innovative deep anomaly detection of building energy consumption using energy time-series images. Eng. Appl. Artif. Intell. 2023, 119, 105775. [Google Scholar] [CrossRef]
- Himeur, Y.; Elnour, M.; Fadli, F.; Meskin, N.; Petri, I.; Rezgui, Y.; Bensaali, F.; Amira, A. Next-generation energy systems for sustainable smart cities: Roles of transfer learning. Sustain. Cities Soc. 2022, 85, 104059. [Google Scholar] [CrossRef]
- Elnour, M.; Fadli, F.; Himeur, Y.; Petri, I.; Rezgui, Y.; Meskin, N.; Ahmad, A.M. Performance and energy optimization of building automation and management systems: Towards smart sustainable carbon-neutral sports facilities. Renew. Sustain. Energy Rev. 2022, 162, 112401. [Google Scholar] [CrossRef]
- Kheddar, H.; Himeur, Y.; Al-Maadeed, S.; Amira, A.; Bensaali, F. Deep Transfer Learning for Automatic Speech Recognition: Towards Better Generalization. arXiv 2023, arXiv:2304.14535. [Google Scholar] [CrossRef]
- Atalla, S.; Tarapiah, S.; Gawanmeh, A.; Daradkeh, M.; Mukhtar, H.; Himeur, Y.; Mansoor, W.; Hashim, K.F.B.; Daadoo, M. IoT-Enabled Precision Agriculture: Developing an Ecosystem for Optimized Crop Management. Information 2023, 14, 205. [Google Scholar] [CrossRef]
- Al-Hasan, T.M.; Shibeika, A.S.; Attique, U.; Bensaali, F.; Himeur, Y. Smart Speed Camera Based on Automatic Number Plate Recognition for Residential Compounds and Institutions Inside Qatar. In Proceedings of the 2022 5th International Conference on Signal Processing and Information Security (ICSPIS), Dubai, United Arab Emirates, 7–8 December 2022; pp. 42–45. [Google Scholar]
- Khalife, J.; Kassas, Z.M. On the achievability of submeter-accurate UAV navigation with cellular signals exploiting loose network synchronization. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4261–4278. [Google Scholar] [CrossRef]
- Elharrouss, O.; Al-Maadeed, S.; Subramanian, N.; Ottakath, N.; Almaadeed, N.; Himeur, Y. Panoptic segmentation: A review. arXiv 2021, arXiv:2111.10250. [Google Scholar]
- Liu, W.; Zhang, T.; Huang, S.; Li, K. A hybrid optimization framework for UAV reconnaissance mission planning. Comput. Ind. Eng. 2022, 173, 108653. [Google Scholar] [CrossRef]
- Ahmed, F.; Mohanta, J.; Keshari, A.; Yadav, P.S. Recent Advances in Unmanned Aerial Vehicles: A Review. Arab. J. Sci. Eng. 2022, 47, 7963–7984. [Google Scholar] [CrossRef]
- Ghazbi, S.N.; Aghli, Y.; Alimohammadi, M.; Akbari, A.A. Quadrotors unmanned aerial vehicles: A review. Int. J. Smart Sens. Intell. Syst. 2016, 9, 309–333. [Google Scholar] [CrossRef]
- Ismail, M.S.; Ahmad, A.; Ismail, S.; Yusop, N.M.M. A review on Unmanned Aerial Vehicle (UAV) threats assessments. In Proceedings of the AIP Conference, Kuala Lumpur, Malaysia, 23 March 2021; Volume 2617, p. 050007. [Google Scholar]
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Zhang, R.; Zhang, J.; Yu, H. Review of modeling and control in UAV autonomous maneuvering flight. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 1920–1925. [Google Scholar]
- Liang, H.; Lee, S.C.; Bae, W.; Kim, J.; Seo, S. Towards UAVs in Construction: Advancements, Challenges, and Future Directions for Monitoring and Inspection. Drones 2023, 7, 202. [Google Scholar] [CrossRef]
- Pina, P.; Vieira, G. UAVs for science in Antarctica. Remote Sens. 2022, 14, 1610. [Google Scholar] [CrossRef]
- Fan, B.; Li, Y.; Zhang, R.; Fu, Q. Review on the technological development and application of UAV systems. Chin. J. Electron. 2020, 29, 199–207. [Google Scholar] [CrossRef]
- Pasha, J.; Elmi, Z.; Purkayastha, S.; Fathollahi-Fard, A.M.; Ge, Y.E.; Lau, Y.Y.; Dulebenets, M.A. The drone scheduling problem: A systematic state-of-the-art review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 14224–14247. [Google Scholar] [CrossRef]
- Mészarós, J. Aerial surveying UAV based on open-source hardware and software. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 38, 155–159. [Google Scholar] [CrossRef] [Green Version]
- Ebeid, E.; Skriver, M.; Terkildsen, K.H.; Jensen, K.; Schultz, U.P. A survey of open-source UAV flight controllers and flight simulators. Microprocess. Microsyst. 2018, 61, 11–20. [Google Scholar] [CrossRef]
- Rojas-Perez, L.O.; Martínez-Carranza, J. On-board processing for autonomous drone racing: An overview. Integration 2021, 80, 46–59. [Google Scholar] [CrossRef]
- Aabid, A.; Parveez, B.; Parveen, N.; Khan, S.A.; Zayan, J.; Shabbir, O. Reviews on design and development of unmanned aerial vehicle (drone) for different applications. J. Mech. Eng. Res. Dev. 2022, 45, 53–69. [Google Scholar]
- Galimov, M.; Fedorenko, R.; Klimchik, A. Uav positioning mechanisms in landing stations: Classification and engineering design review. Sensors 2020, 20, 3648. [Google Scholar] [CrossRef] [PubMed]
- Amin, R.; Aijun, L.; Shamshirband, S. A review of quadrotor UAV: Control methodologies and performance evaluation. Int. J. Autom. Control 2016, 10, 87–103. [Google Scholar] [CrossRef]
- Campion, M.; Ranganathan, P.; Faruque, S. UAV swarm communication and control architectures: A review. J. Unmanned Veh. Syst. 2018, 7, 93–106. [Google Scholar] [CrossRef]
- Nawaz, H.; Ali, H.M.; Laghari, A.A. UAV communication networks issues: A review. Arch. Comput. Methods Eng. 2021, 28, 1349–1369. [Google Scholar] [CrossRef]
- Do, Q.T.; Lakew, D.S.; Tran, A.T.; Hua, D.T.; Cho, S. A Review on Recent Approaches in mmWave UAV-aided Communication Networks and Open Issues. In Proceedings of the 2023 International Conference on Information Networking (ICOIN), Bangkok, Thailand, 11–14 January 2023; pp. 728–731. [Google Scholar]
- Singh, R.; Ballal, K.D.; Berger, M.S.; Dittmann, L. Overview of Drone Communication Requirements in 5G. In Proceedings of the Internet of Things: 5th The Global IoT Summit, GIoTS 2022, Revised Selected Papers, Dublin, Ireland, 20–23 June 2022; pp. 3–16. [Google Scholar]
- Osco, L.P.; Junior, J.M.; Ramos, A.P.M.; de Castro Jorge, L.A.; Fatholahi, S.N.; de Andrade Silva, J.; Matsubara, E.T.; Pistori, H.; Gonçalves, W.N.; Li, J. A review on deep learning in UAV remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102456. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. A review of artificial intelligence applied to path planning in UAV swarms. Neural Comput. Appl. 2022, 34, 153–170. [Google Scholar] [CrossRef]
- Chen, C.; Zheng, Z.; Xu, T.; Guo, S.; Feng, S.; Yao, W.; Lan, Y. YOLO-Based UAV Technology: A Review of the Research and Its Applications. Drones 2023, 7, 190. [Google Scholar] [CrossRef]
- Othman, N.A.; Aydin, I. Development of a Novel Lightweight CNN Model for Classification of Human Actions in UAV-Captured Videos. Drones 2023, 7, 148. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Fudala, K.; Bialik, R.J. The use of drone-based aerial photogrammetry in population monitoring of Southern Giant Petrels in ASMA 1, King George Island, maritime Antarctica. Glob. Ecol. Conserv. 2022, 33, e01990. [Google Scholar] [CrossRef]
- Ventura, D.; Bonifazi, A.; Gravina, M.F.; Ardizzone, G.D. Unmanned aerial systems (UASs) for environmental monitoring: A review with applications in coastal habitats. In Aerial Robots-Aerodynamics, Control and Applications; Intech: Rijeka, Croatia, 2017; pp. 165–184. [Google Scholar]
- Yang, Z.; Yu, X.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV remote sensing applications in marine monitoring: Knowledge visualization and review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef]
- Kabir, R.H.; Lee, K. Wildlife monitoring using a multi-uav system with optimal transport theory. Appl. Sci. 2021, 11, 4070. [Google Scholar] [CrossRef]
- Mangewa, L.J.; Ndakidemi, P.A.; Munishi, L.K. Integrating UAV technology in an ecological monitoring system for community wildlife management areas in Tanzania. Sustainability 2019, 11, 6116. [Google Scholar] [CrossRef] [Green Version]
- Zmarz, A.; Rodzewicz, M.; Dąbski, M.; Karsznia, I.; Korczak-Abshire, M.; Chwedorzewska, K.J. Application of UAV BVLOS remote sensing data for multi-faceted analysis of Antarctic ecosystem. Remote Sens. Environ. 2018, 217, 375–388. [Google Scholar] [CrossRef]
- Ezequiel, C.A.F.; Cua, M.; Libatique, N.C.; Tangonan, G.L.; Alampay, R.; Labuguen, R.T.; Favila, C.M.; Honrado, J.L.E.; Canos, V.; Devaney, C.; et al. UAV aerial imaging applications for post-disaster assessment, environmental management and infrastructure development. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 274–283. [Google Scholar]
- Fumian, F.; Di Giovanni, D.; Martellucci, L.; Rossi, R.; Gaudio, P. Application of miniaturized sensors to unmanned aerial systems, a new pathway for the survey of polluted areas: Preliminary results. Atmosphere 2020, 11, 471. [Google Scholar] [CrossRef]
- Patnaik, K.; Zhang, W. Towards reconfigurable and flexible multirotors: A literature survey and discussion on potential challenges. Int. J. Intell. Robot. Appl. 2021, 5, 365–380. [Google Scholar] [CrossRef]
- Ta, D.A.; Fantoni, I.; Lozano, R. Modeling and control of a convertible mini-UAV. IFAC Proc. Vol. 2011, 44, 1492–1497. [Google Scholar] [CrossRef] [Green Version]
- da Silva Ferreira, M.A.; Begazo, M.F.T.; Lopes, G.C.; de Oliveira, A.F.; Colombini, E.L.; da Silva Simões, A. Drone reconfigurable architecture (dra): A multipurpose modular architecture for unmanned aerial vehicles (uavs). J. Intell. Robot. Syst. 2020, 99, 517–534. [Google Scholar] [CrossRef]
- Schiano, F.; Kornatowski, P.M.; Cencetti, L.; Floreano, D. Reconfigurable drone system for transportation of parcels with variable mass and size. IEEE Robot. Autom. Lett. 2022, 7, 12150–12157. [Google Scholar] [CrossRef]
- Singhal, G.; Bansod, B.; Mathew, L. Unmanned aerial vehicle classification, applications and challenges: A review. Preprints 2018. [Google Scholar] [CrossRef] [Green Version]
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Alam, M.M.; Moh, S. Vision-based navigation techniques for unmanned aerial vehicles: Review and challenges. Drones 2023, 7, 89. [Google Scholar] [CrossRef]
- Kapoor, R.; Shukla, A.; Goyal, V. Unmanned aerial vehicle (UAV) communications using multiple antennas. In Proceedings of the Advanced Computational Paradigms and Hybrid Intelligent Computing: Proceedings of ICACCP 2021; Springer: Singapore, 2022; pp. 261–272. [Google Scholar]
- Yan, C.; Fu, L.; Zhang, J.; Wang, J. A comprehensive survey on UAV communication channel modeling. IEEE Access 2019, 7, 107769–107792. [Google Scholar] [CrossRef]
- Song, Q.; Zeng, Y.; Xu, J.; Jin, S. A survey of prototype and experiment for UAV communications. Sci. China Inf. Sci. 2021, 64, 1–21. [Google Scholar] [CrossRef]
- Zhao, J.; Gao, F.; Ding, G.; Zhang, T.; Jia, W.; Nallanathan, A. Integrating communications and control for UAV systems: Opportunities and challenges. IEEE Access 2018, 6, 67519–67527. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Drone-based antenna array for service time minimization in wireless networks. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Khan, M.M.; Hossain, S.; Majumder, P.; Akter, S.; Ashique, R.H. A review on machine learning and deep learning for various antenna design applications. Heliyon 2022, 8, E09317. [Google Scholar] [CrossRef]
- Wu, C.; Lai, C.F. A survey on improving the wireless communication with adaptive antenna selection by intelligent method. Comput. Commun. 2022, 181, 374–403. [Google Scholar] [CrossRef]
- Kapoor, R.; Shukla, A.; Goyal, V. Analysis of multiple antenna techniques for unmanned aerial vehicle (UAV) communication. In Proceedings of the IOT with Smart Systems: Proceedings of ICTIS 2021; Springer: Singapore, 2022; Volume 2, pp. 347–357. [Google Scholar]
- Parvaresh, N.; Kulhandjian, M.; Kulhandjian, H.; D’Amours, C.; Kantarci, B. A tutorial on AI-powered 3D deployment of drone base stations: State of the art, applications and challenges. Veh. Commun. 2022, 36, 100474. [Google Scholar] [CrossRef]
- Shi, L.; Marcano, N.J.H.; Jacobsen, R.H. A review on communication protocols for autonomous unmanned aerial vehicles for inspection application. Microprocess. Microsyst. 2021, 86, 104340. [Google Scholar] [CrossRef]
- Khan, M.; Qureshi, I.; Khanzada, F. A hybrid communication scheme for efficient and low-cost deployment of future flying ad hoc network (FANET). Drones 2019, 3, 16. [Google Scholar] [CrossRef] [Green Version]
- Brown, T.; Argrow, B.; Dixon, C.; Doshi, S.; Thekkekunnel, R.G.; Henkel, D. Ad hoc UAV ground network (AUGNet). In Proceedings of the AIAA 3rd “ Unmanned Unlimited” Technical Conference, Workshop and Exhibit, Chicago, IL, USA, 20–23 September 2004; p. 6321. [Google Scholar]
- Yanmaz, E.; Hayat, S.; Scherer, J.; Bettstetter, C. Experimental performance analysis of two-hop aerial 802.11 networks. In Proceedings of the 2014 IEEE Wireless Communications and Networking Conference (WCNC), Istanbul, Turkey, 6–9 April 2014; pp. 3118–3123. [Google Scholar]
- Asadpour, M.; Giustiniano, D.; Hummel, K.A.; Heimlicher, S.; Egli, S. Now or later? delaying data transfer in time-critical aerial communication. In Proceedings of the Ninth ACM conference on Emerging Networking Experiments and Technologies, Paris, France, 5–8 December 2013; pp. 127–132. [Google Scholar]
- Morgenthaler, S.; Braun, T.; Zhao, Z.; Staub, T.; Anwander, M. UAVNet: A mobile wireless mesh network using unmanned aerial vehicles. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; pp. 1603–1608. [Google Scholar]
- Lv, F.; Zhu, H.; Xue, H.; Zhu, Y.; Chang, S.; Dong, M.; Li, M. An empirical study on urban IEEE 802.11 p vehicle-to-vehicle communication. In Proceedings of the 2016 13th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), London, UK, 27–30 June 2016; pp. 1–9. [Google Scholar]
- Pereira, D.S.; De Morais, M.R.; Nascimento, L.B.; Alsina, P.J.; Santos, V.G.; Fernandes, D.H.; Silva, M.R. Zigbee protocol-based communication network for multi-unmanned aerial vehicle networks. IEEE Access 2020, 8, 57762–57771. [Google Scholar] [CrossRef]
- Ferreira, L.C.; Claudio Batista Da Silva, L.; Ferreira Rosa, P.F. Performance evaluation of LoRa and ZigBee technologies applied to FANETs. In Proceedings of the Latin American Robotics Symposium (LARS), 2021 Brazilian Symposium on Robotics (SBR), and 2021 Workshop on Robotics in Education (WRE), Natal, Brazil, 11–15 October 2021; pp. 48–53. [Google Scholar] [CrossRef]
- QasMarrogy, G.A.; Fadhil, A.J. A Comparative Study of Different FANET 802.11 Wireless Protocols with Different Data Loads. Polytech. J. 2022, 12, 61–66. [Google Scholar] [CrossRef]
- Paredes, W.D.; Kaushal, H.; Vakilinia, I.; Prodanoff, Z. LoRa Technology in Flying Ad Hoc Networks: A Survey of Challenges and Open Issues. Sensors 2023, 23, 2403. [Google Scholar] [CrossRef]
- Noor, F.; Khan, M.A.; Al-Zahrani, A.; Ullah, I.; Al-Dhlan, K.A. A review on communications perspective of flying ad hoc networks: Key enabling wireless technologies, applications, challenges and open research topics. Drones 2020, 4, 65. [Google Scholar] [CrossRef]
- Martinez-Caro, J.M.; Cano, M.D. IoT system integrating unmanned aerial vehicles and LoRa technology: A performance evaluation study. Wirel. Commun. Mob. Comput. 2019, 2019, 4307925. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Yin, D.; Yang, J.; Shen, L. Research of remote measurement and control technology of UAV based on mobile communication networks. In Proceedings of the IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 2517–2522. [Google Scholar]
- Xu, Y.; Gui, G. Optimal resource allocation for wireless powered multi-carrier backscatter communication networks. IEEE Wirel. Commun. Lett. 2020, 9, 1191–1195. [Google Scholar] [CrossRef]
- Nguyen, H.C.; Amorim, R.; Wigard, J.; Kovács, I.Z.; Sørensen, T.B.; Mogensen, P.E. How to ensure reliable connectivity for aerial vehicles over cellular networks. IEEE Access 2018, 6, 12304–12317. [Google Scholar] [CrossRef]
- Hosseini, N.; Jamal, H.; Haque, J.; Magesacher, T.; Matolak, D.W. UAV command and control, navigation and surveillance: A review of potential 5G and satellite systems. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–10. [Google Scholar]
- Colajanni, G.; Daniele, P.; Galluccio, L.; Grasso, C.; Schembra, G. Service Chain Placement Optimization in 5G FANET-Based Network Edge. IEEE Commun. Mag. 2022, 60, 60–65. [Google Scholar] [CrossRef]
- Amponis, G.; Lagkas, T.; Zevgara, M.; Katsikas, G.; Xirofotos, T.; Moscholios, I.; Sarigiannidis, P. Drones in B5G/6G networks as flying base stations. Drones 2022, 6, 39. [Google Scholar] [CrossRef]
- Grasso, C.; Raftopoulos, R.; Schembra, G. Tailoring fanet-based 6g network slices in remote areas for low-latency applications. Procedia Comput. Sci. 2022, 203, 69–78. [Google Scholar] [CrossRef]
- Oliveira, M.T.d.; Miranda, R.K.; da Costa, J.P.C.; de Almeida, A.L.; Sousa, R.T.d. Low cost antenna array based drone tracking device for outdoor environments. Wirel. Commun. Mob. Comput. 2019, 2019, 5437908. [Google Scholar] [CrossRef]
- Ganti, S.R.; Kim, Y. Design of low-cost on-board auto-tracking antenna for small UAS. In Proceedings of the 12th International Conference on Information Technology-New Generations, Las Vegas, NV, USA, 13–15 April 2015; pp. 273–279. [Google Scholar]
- Carneiro, A.F.A.; Torres, J.P.N.; Baptista, A.; Martins, M.J.M. Smart Antenna for Application in UAVs. Information 2018, 9, 328. [Google Scholar] [CrossRef] [Green Version]
- Abdelmaboud, A. The internet of drones: Requirements, taxonomy, recent advances, and challenges of research trends. Sensors 2021, 21, 5718. [Google Scholar] [CrossRef] [PubMed]
- Goyal, N.; Sharma, S.; Rana, A.K.; Tripathi, S.L. Internet of Things: Robotic and Drone Technology; CRC Press: Boca Raton, FL, USA, 2022. [Google Scholar]
- Israr, A.; Abro, G.E.M.; Sadiq Ali Khan, M.; Farhan, M.; Bin Mohd Zulkifli, S.U.A. Internet of things (IoT)-Enabled unmanned aerial vehicles for the inspection of construction sites: A vision and future directions. Math. Probl. Eng. 2021, 2021, 9931112. [Google Scholar] [CrossRef]
- Aldeen, Y.; Abdulhadi, H.M. Data communication for drone-enabled internet of things. Indones. J. Electr. Eng. Comput. Sci. 2021, 22, 1216–1222. [Google Scholar] [CrossRef]
- Sun, Y.; Fesenko, H.; Kharchenko, V.; Zhong, L.; Kliushnikov, I.; Illiashenko, O.; Morozova, O.; Sachenko, A. UAV and IoT-Based Systems for the Monitoring of Industrial Facilities Using Digital Twins: Methodology, Reliability Models, and Application. Sensors 2022, 22, 6444. [Google Scholar] [CrossRef] [PubMed]
- Lakshman, S.A.; Ebenezer, D. Integration of internet of things and drones and its future applications. Mater. Today Proc. 2021, 47, 944–949. [Google Scholar] [CrossRef]
- Shen, S.; Mulgaonkar, Y.; Michael, N.; Kumar, V. Multi-sensor fusion for robust autonomous flight in indoor and outdoor environments with a rotorcraft MAV. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 1 May–7 June 2014; pp. 4974–4981. [Google Scholar]
- Xin, L.; Tang, Z.; Gai, W.; Liu, H. Vision-Based Autonomous Landing for the UAV: A Review. Aerospace 2022, 9, 634. [Google Scholar] [CrossRef]
- Choi, S.Y.; Cha, D. Unmanned aerial vehicles using machine learning for autonomous flight; state-of-the-art. Adv. Robot. 2019, 33, 265–277. [Google Scholar] [CrossRef]
- Noor, M.Y.B.M.; Ismail, M.; b Khyasudeen, M.F.; Shariffuddin, A.; Kamel, N.; Azzuhri, S.R. Autonomous precision landing for commercial UAV: A review. Fuzzy Syst. Data Min. III Proc. Fsdm 2017, 298, 459–468. [Google Scholar]
- Zulu, A.; John, S. A review of control algorithms for autonomous quadrotors. arXiv 2016, arXiv:1602.02622. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Chen, W.H.; Liu, C. Review of UAV-Based Autonomous Search Algorithms for Hazardous Sources. Loughb. Univ. Sci. Sin. Inform. 2016, 52, 1579. [Google Scholar] [CrossRef]
- Crommelinck, S.; Bennett, R.; Gerke, M.; Nex, F.; Yang, M.Y.; Vosselman, G. Review of automatic feature extraction from high-resolution optical sensor data for UAV-based cadastral mapping. Remote Sens. 2016, 8, 689. [Google Scholar] [CrossRef] [Green Version]
- Corradi, F.; Fioranelli, F. Radar Perception for Autonomous Unmanned Aerial Vehicles: A Survey. Syst. Eng. Constrained Embed. Syst. 2022, 14–20. [Google Scholar]
- Sun, Z.; Wang, X.; Wang, Z.; Yang, L.; Xie, Y.; Huang, Y. UAVs as remote sensing platforms in plant ecology: Review of applications and challenges. J. Plant Ecol. 2021, 14, 1003–1023. [Google Scholar] [CrossRef]
- Guan, S.; Zhu, Z.; Wang, G. A review on UAV-based remote sensing technologies for construction and civil applications. Drones 2022, 6, 117. [Google Scholar] [CrossRef]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A review of UAV monitoring in mining areas: Current status and future perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef] [Green Version]
- Bailon-Ruiz, R.; Lacroix, S. Wildfire remote sensing with UAVs: A review from the autonomy point of view. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 412–420. [Google Scholar]
- Merino, L.; Caballero, F.; Ferruz, J.; Wiklund, J.; Forssén, P.E.; Ollero, A. Multi-UAV cooperative perception techniques. Mult. Heterog. Unmanned Aer. Veh. 2007, 37, 67–110. [Google Scholar]
- Chodnicki, M.; Siemiatkowska, B.; Stecz, W.; Stępień, S. Energy Efficient UAV Flight Control Method in an Environment with Obstacles and Gusts of Wind. Energies 2022, 15, 3730. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Amici, C.; Ceresoli, F.; Pasetti, M.; Saponi, M.; Tiboni, M.; Zanoni, S. Review of propulsion system design strategies for unmanned aerial vehicles. Appl. Sci. 2021, 11, 5209. [Google Scholar] [CrossRef]
- Gur, O.; Rosen, A. Optimizing electric propulsion systems for unmanned aerial vehicles. J. Aircr. 2009, 46, 1340–1353. [Google Scholar] [CrossRef] [Green Version]
- Betancourth, N.J.P.; Villamarin, J.E.P.; Rios, J.J.V.; Bravo-Mosquera, P.D.; Cerón-Muñoz, H.D. Design and manufacture of a solar-powered unmanned aerial vehicle for civilian surveillance missions. J. Aerosp. Technol. Manag. 2016, 8, 385–396. [Google Scholar] [CrossRef] [Green Version]
- Rajendran, P.; Smith, H. Review of solar and battery power system development for solar-powered electric unmanned aerial vehicles. Adv. Mater. Res. 2015, 1125, 641–647. [Google Scholar] [CrossRef]
- Nemer, I.A.; Sheltami, T.R.; Belhaiza, S.; Mahmoud, A.S. Energy-efficient UAV movement control for fair communication coverage: A deep reinforcement learning approach. Sensors 2022, 22, 1919. [Google Scholar] [CrossRef]
- Xiao, T.; Wei, W.; Hongliang, H.; Zhang, R. Energy-efficient data collection for UAV-assisted IoT: Joint trajectory and resource optimization. Chin. J. Aeronaut. 2022, 35, 95–105. [Google Scholar]
- Do, H.T.; Truong, L.H.; Nguyen, M.T.; Chien, C.F.; Tran, H.T.; Hua, H.T.; Nguyen, C.V.; Nguyen, H.T.; Nguyen, N.T. Energy-efficient unmanned aerial vehicle (UAV) surveillance utilizing artificial intelligence (AI). Wirel. Commun. Mob. Comput. 2021, 2021, 8615367. [Google Scholar] [CrossRef]
- Jiao, R.; Wang, Z.; Chu, R.; Dong, M.; Rong, Y.; Chou, W. An intuitive end-to-end human-UAV interaction system for field exploration. Front. Neur. 2020, 13, 117. [Google Scholar] [CrossRef]
- Kassab, M.A.; Ahmed, M.; Maher, A.; Zhang, B. Real-time human-UAV interaction: New dataset and two novel gesture-based interacting systems. IEEE Access 2020, 8, 195030–195045. [Google Scholar] [CrossRef]
- Müezzinoğlu, T.; Karaköse, M. An intelligent human–unmanned aerial vehicle interaction approach in real time based on machine learning using wearable gloves. Sensors 2021, 21, 1766. [Google Scholar] [CrossRef]
- Chen, B.; Hua, C.; Li, D.; He, Y.; Han, J. Intelligent Human–UAV interaction system with joint cross-validation over Action–Gesture recognition and scene understanding. Appl. Sci. 2019, 9, 3277. [Google Scholar] [CrossRef] [Green Version]
- Maher, A.; Li, C.; Hu, H.; Zhang, B. Realtime human-UAV interaction using deep learning. In Proceedings of the Biometric Recognition: 12th Chinese Conference, CCBR 2017, Shenzhen, China, 28–29 October 2017; Proceedings 12. Springer: Singapore, 2017; pp. 511–519. [Google Scholar]
- Rajappa, S.; Bülthoff, H.; Stegagno, P. Design and implementation of a novel architecture for physical human-UAV interaction. Int. J. Robot. Res. 2017, 36, 800–819. [Google Scholar] [CrossRef]
- Rajappa, S. Towards Human-UAV Physical Interaction and Fully Actuated Aerial Vehicles. Ph.D. Thesis, University Tübingen, Wilhelmstrasse, Germany, 2017. [Google Scholar]
- Nisser, T.; Westin, C. Human Factors Challenges in Unmanned Aerial Vehicles (Uavs): A Literature Review; School of Aviation of the Lund University: Ljungbyhed, Sweden, 2006. [Google Scholar]
- Hart, S.; Steane, V.; Bullock, S.; Noyes, J.M. Understanding Human Decision-Making when Controlling UAVs in a Search and Rescue Application. Hum. Interact. Emerg. Technol. 2022, 68. [Google Scholar] [CrossRef]
- Tezza, D.; Andujar, M. The state-of-the-art of human–drone interaction: A survey. IEEE Access 2019, 7, 167438–167454. [Google Scholar] [CrossRef]
- Zhou, Y.; Rao, B.; Wang, W. Uav swarm intelligence: Recent advances and future trends. IEEE Access 2020, 8, 183856–183878. [Google Scholar] [CrossRef]
- Khelifi, M.; Butun, I. Swarm Unmanned Aerial Vehicles (SUAVs): A Comprehensive Analysis of Localization, Recent Aspects, and Future Trends. J. Sens. 2022, 2022, 8600674. [Google Scholar] [CrossRef]
- Campion, M.; Ranganathan, P.; Faruque, S. A review and future directions of UAV swarm communication architectures. In Proceedings of the IEEE International Conference on Electro/Information Technology (EIT), Rochester, MI, USA, 3–5 May 2018; pp. 0903–0908. [Google Scholar]
- Paulsson, M. High-Level Control of UAV Swarms with RSSI Based Position Estimation. Master’s Thesis, Lund University, Lund, Sweden, 2017. [Google Scholar]
- KA, V.K.; Priyadarshini, R.; Kathik, P.; Madhan, E.; Sonya, A. Self-co-ordination algorithm (SCA) for multi-UAV systems using fair scheduling queue. Sens. Rev. 2022. ahead-of-print. [Google Scholar] [CrossRef]
- Iqbal, M.M.; Ali, Z.A.; Khan, R.; Shafiq, M. Motion Planning of UAV Swarm: Recent Challenges and Approaches. In Aeronautics-New Advances; IntechOpen: London, UK, 2022. [Google Scholar]
- Zhu, X.; Liu, Z.; Yang, J. Model of collaborative UAV swarm toward coordination and control mechanisms study. Procedia Comput. Sci. 2015, 51, 493–502. [Google Scholar] [CrossRef] [Green Version]
- Peng, Q.; Wu, H.; Xue, R. Review of dynamic task allocation methods for UAV swarms oriented to ground targets. Complex Syst. Model. Simul. 2021, 1, 163–175. [Google Scholar] [CrossRef]
- Qamar, S.; Khan, S.H.; Arshad, M.A.; Qamar, M.; Khan, A. Autonomous drone swarm navigation and multi-target tracking in 3D environments with dynamic obstacles. arXiv 2022, arXiv:2202.06253. [Google Scholar]
- Taha, B.; Shoufan, A. Machine learning-based drone detection and classification: State-of-the-art in research. IEEE Access 2019, 7, 138669–138682. [Google Scholar] [CrossRef]
- Bhalara, R.; Shilu, R.J.; Nandi, D. A Review on Aircraft Detection Techniques and Feature Extraction Using Deep Learning. IJAEM 2020, 7, 305–307. [Google Scholar]
- Zhou, L.; Yan, H.; Shan, Y.; Zheng, C.; Liu, Y.; Zuo, X.; Qiao, B. Aircraft detection for remote sensing images based on deep convolutional neural networks. J. Electr. Comput. Eng. 2021, 2021, 4685644. [Google Scholar] [CrossRef]
- Kiyak, E.; Unal, G. Small aircraft detection using deep learning. Aircr. Eng. Aerosp. Technol. 2021, 93, 671–681. [Google Scholar] [CrossRef]
- Thoudoju, A.K. Detection of Aircraft, Vehicles and Ships in Aerial and Satellite Imagery Using Evolutionary Deep Learning. Master’s Thesis, Blekinge Institute of Technology, Karlskrona, Sweden, 2021. [Google Scholar]
- Ferraz, M.F.; Júnior, L.B.; Komori, A.S.; Rech, L.C.; Schneider, G.H.; Berger, G.S.; Cantieri, Á.R.; Lima, J.; Wehrmeister, M.A. Artificial Intelligence Architecture Based on Planar LiDAR Scan Data to Detect Energy Pylon Structures in a UAV Autonomous Detailed Inspection Process. In Proceedings of the Optimization, Learning Algorithms and Applications: First International Conference, OL2A 2021, Bragança, Portugal, 19–21 July 2021; Revised Selected Papers 1. Springer: Berlin/Heidelberg, Germany, 2021; pp. 430–443. [Google Scholar]
- Himeur, Y.; Sohail, S.S.; Bensaali, F.; Amira, A.; Alazab, M. Latest trends of security and privacy in recommender systems: A comprehensive review and future perspectives. Comput. Secur. 2022, 118, 102746. [Google Scholar] [CrossRef]
- Hendria, W.F.; Phan, Q.T.; Adzaka, F.; Jeong, C. Combining transformer and CNN for object detection in UAV imagery. ICT Express 2021, 98, 258–263. [Google Scholar] [CrossRef]
- Radovic, M.; Adarkwa, O.; Wang, Q. Object recognition in aerial images using convolutional neural networks. J. Imaging 2017, 3, 21. [Google Scholar] [CrossRef] [Green Version]
- Rahnemoonfar, M.; Murphy, R.; Miquel, M.V.; Dobbs, D.; Adams, A. Flooded area detection from UAV images based on densely connected recurrent neural networks. In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 1788–1791. [Google Scholar]
- Bejiga, M.B.; Zeggada, A.; Melgani, F. Convolutional neural networks for near real-time object detection from UAV imagery in avalanche search and rescue operations. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 693–696. [Google Scholar]
- Himeur, Y.; Al-Maadeed, S.; Kheddar, H.; Al-Maadeed, N.; Abualsaud, K.; Mohamed, A.; Khattab, T. Video surveillance using deep transfer learning and deep domain adaptation: Towards better generalization. Eng. Appl. Artif. Intell. 2023, 119, 105698. [Google Scholar] [CrossRef]
- Li, S.; Jia, Y.; Yang, F.; Qin, Q.; Gao, H.; Zhou, Y. Collaborative Decision-Making Method for Multi-UAV Based on Multiagent Reinforcement Learning. IEEE Access 2022, 10, 91385–91396. [Google Scholar] [CrossRef]
- Rezwan, S.; Choi, W. Artificial intelligence approaches for UAV navigation: Recent advances and future challenges. IEEE Access 2022, 10, 26320–26339. [Google Scholar] [CrossRef]
- Yin, R.; Li, W.; Wang, Z.Q.; Xu, X.X. The application of artificial intelligence technology in UAV. In Proceedings of the 2020 5th International Conference on Information Science, Computer Technology and Transportation (ISCTT), Shenyang, China, 13–15 November 2020; pp. 238–241. [Google Scholar]
- OpenAI ChatGPT. Available online: https://chat.openai.com/ (accessed on 21 July 2023).
- Sohail, S.S.; Madsen, D.; Himeur, Y.; Ashraf, M. Using ChatGPT to Navigate Ambivalent and Contradictory Research Findings on Artificial Intelligence. Available at SSRN 4413913. 2023. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4413913 (accessed on 22 July 2023).
- Zhang, B.; Soh, H. Large Language Models as Zero-Shot Human Models for Human-Robot Interaction. arXiv 2023, arXiv:2303.03548. [Google Scholar]
- Liu, J.X.; Yang, Z.; Idrees, I.; Liang, S.; Schornstein, B.; Tellex, S.; Shah, A. Lang2LTL: Translating Natural Language Commands to Temporal Robot Task Specification. arXiv 2023, arXiv:2302.11649. [Google Scholar]
- Sohail, S.S.; Farhat, F.; Himeur, Y.; Nadeem, M.; Madsen, D.Ø.; Singh, Y.; Atalla, S.; Mansoor, W. The Future of GPT: A Taxonomy of Existing ChatGPT Research, Current Challenges, and Possible Future Directions. Curr. Challenges Possible Future Dir. 2023. [Google Scholar] [CrossRef]
- Hong, Y.; Wu, Q.; Qi, Y.; Rodriguez-Opazo, C.; Gould, S. A recurrent vision-and-language bert for navigation. arXiv 2020, arXiv:2011.13922. [Google Scholar]
- Bucker, A.; Figueredo, L.; Haddadinl, S.; Kapoor, A.; Ma, S.; Bonatti, R. Reshaping robot trajectories using natural language commands: A study of multi-modal data alignment using transformers. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 978–984. [Google Scholar]
- Vemprala, S.; Bonatti, R.; Bucker, A.; Kapoor, A. Chatgpt for robotics: Design principles and model abilities. Microsoft Auton. Syst. Robot. Res. 2023, 2, 20. [Google Scholar]
- Microsoft AirSim ChatGPT. Available online: https://youtu.be/NYd0QcZcS6Q (accessed on 22 July 2023).
- AirSim-ChatGPT, PromptCraft Code. Available online: https://github.com/microsoft/PromptCraft-Robotics (accessed on 22 July 2023).
- Microsoft AirSim ChatGPT for Industrial Inspection. Available online: https://www.youtube.com/watch?v=38lA3U2J43w&feature=youtu.be (accessed on 22 July 2023).
- Tiwary, A.; Rimal, B.; Himeur, Y.; Amira, A. Monitoring Nature-Based Engineering Projects in Mountainous Region Incorporating Spatial Imaging: Case Study of a Hydroelectric Project in Nepal. In Proceedings of the CITIES 20.50–Creating Habitats for the 3rd Millennium: Smart–Sustainable–Climate Neutral. Proceedings of REAL CORP 2021, 26th International Conference on Urban Development, Regional Planning and Information Society. CORP–Competence Center of Urban and Regional Planning, Vienna, Austria, 7–10 September 2021; pp. 535–538. [Google Scholar]
- Himeur, Y.; Rimal, B.; Tiwary, A.; Amira, A. Using artificial intelligence and data fusion for environmental monitoring: A review and future perspectives. Inf. Fusion 2022, 86–87, 44–75. [Google Scholar]
- Serna, J.G.; Vanegas, F.; Gonzalez, F.; Flannery, D. A review of current approaches for UAV autonomous mission planning for Mars biosignatures detection. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–15. [Google Scholar]
- Himeur, Y.; Elnour, M.; Fadli, F.; Meskin, N.; Petri, I.; Rezgui, Y.; Bensaali, F.; Amira, A. AI-big data analytics for building automation and management systems: A survey, actual challenges and future perspectives. Artif. Intell. Rev. 2022, 56, 4929–5021. [Google Scholar] [CrossRef] [PubMed]
- Wójcik, K.A.; Bialik, R.J.; Osińska, M.; Figielski, M. Investigation of Sediment-Rich glacial meltwater plumes using a high-resolution multispectral sensor mounted on an unmanned aerial vehicle. Water 2019, 11, 2405. [Google Scholar] [CrossRef] [Green Version]
- Bauranov, A.; Rakas, J. Designing airspace for urban air mobility: A review of concepts and approaches. Prog. Aerosp. Sci. 2021, 125, 100726. [Google Scholar]
- Garrow, L.A.; German, B.J.; Leonard, C.E. Urban air mobility: A comprehensive review and comparative analysis with autonomous and electric ground transportation for informing future research. Transp. Res. Part Emerg. Technol. 2021, 132, 103377. [Google Scholar]
- Rothfeld, R.; Straubinger, A.; Fu, M.; Al Haddad, C.; Antoniou, C. Urban air mobility. In Demand for Emerging Transportation Systems; Elsevier: Amsterdam, The Netherlands, 2020; pp. 267–284. [Google Scholar]
- Shrestha, R.; Oh, I.; Kim, S. A survey on operation concept, advancements, and challenging issues of urban air traffic management. Front. Future Transp. 2021, 2, 1. [Google Scholar]
- Di Giovanni, D.; Fumian, F.; Chierici, A.; Bianchelli, M.; Martellucci, L.; Carminati, G.; Malizia, A.; d’Errico, F.; Gaudio, P. Design of Miniaturized Sensors for a Mission-Oriented UAV Application: A New Pathway for Early Warning. Int. J. Saf. Secur. Eng. 2021, 11, 435–444. [Google Scholar]
- Matalonga, S.; White, S.; Hartmann, J.; Riordan, J. A review of the legal, regulatory and practical aspects needed to unlock autonomous beyond visual line of sight unmanned aircraft systems operations. J. Intell. Robot. Syst. 2022, 106, 10. [Google Scholar]
- Skowron, M.; Chmielowiec, W.; Glowacka, K.; Krupa, M.; Srebro, A. Sense and avoid for small unmanned aircraft systems: Research on methods and best practices. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 6044–6062. [Google Scholar]
- Hartley, R.J.A.L.; Henderson, I.L.; Jackson, C.L. BVLOS Unmanned Aircraft Operations in Forest Environments. Drones 2022, 6, 167. [Google Scholar]
- Gray, J. Design Optimization of a Boundary Layer Ingestion Propulsor Using a Coupled Aeropropulsive Model. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2018. [Google Scholar]
- Chen, Y. Overview of Solar UAV Power System. Acad. J. Sci. Technol. 2022, 4, 80–82. [Google Scholar] [CrossRef]
- Pal, S.; Mishra, A.; Singh, P. Recent Trends in Long Endurance Solar Powered UAVs: A Review. Int. J. Adv. Sci. Technol. 2021, 19, 6009–6018. [Google Scholar]
- Harun, M.; Abdullah, S.; Aras, M.; Bahar, M. Collision Avoidance Control for Unmanned Autonomous Vehicles (UAV): Recent Advancements and Future Prospects; NIScPR-CSIR: New Delhi, India, 2021. [Google Scholar]
- Gan, X.; Wu, Y.; Liu, P.; Wang, Q. Dynamic collision avoidance zone modeling method based on UAV emergency collision avoidance trajectory. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Information Systems (ICAIIS), Dalian, China, 20–22 March 2020; pp. 693–696. [Google Scholar]
- Kakaletsis, E.; Symeonidis, C.; Tzelepi, M.; Mademlis, I.; Tefas, A.; Nikolaidis, N.; Pitas, I. Computer vision for autonomous UAV flight safety: An overview and a vision-based safe landing pipeline example. Acm Comput. Surv. 2021, 54, 1–37. [Google Scholar]
- Hadi, G.S.; Varianto, R.; Trilaksono, B.; Budiyono, A. Autonomous UAV system development for payload dropping mission. J. Instrum. Autom. Syst. 2014, 1, 72–77. [Google Scholar] [CrossRef]
- Cruz, P.J.; Fierro, R. Cable-suspended load lifting by a quadrotor UAV: Hybrid model, trajectory generation, and control. Auton. Robot. 2017, 41, 1629–1643. [Google Scholar]
- Santos, M.A.; Rego, B.; Raffo, G.V.; Ferramosca, A. Suspended load path tracking control strategy using a tilt-rotor UAV. J. Adv. Transp. 2017, 1–22. [Google Scholar] [CrossRef]
- Mohammadi, K. Passivity-Based Control of Multiple Quad-Copters with a Cable-Suspended Payload. Ph.D. Thesis, McMaster University, Hamilton, ON, Canada, 2021. [Google Scholar]
- Derrouaoui, S.H.; Bouzid, Y.; Guiatni, M.; Dib, I. A comprehensive review on reconfigurable drones: Classification, characteristics, design and control technologies. Unmanned Syst. 2022, 10, 3–29. [Google Scholar]
- Moosavian, A.; Xi, F.; Hashemi, S.M. Design and motion control of fully variable morphing wings. J. Aircr. 2013, 50, 1189–1201. [Google Scholar] [CrossRef]
- Ajanic, E.; Feroskhan, M.; Mintchev, S.; Noca, F.; Floreano, D. Bioinspired wing and tail morphing extends drone flight capabilities. Sci. Robot. 2020, 5, eabc2897. [Google Scholar] [CrossRef]
- Jiakun, H.; Zhe, H.; Fangbao, T.; Gang, C. Review on bio-inspired flight systems and bionic aerodynamics. Chin. J. Aeronaut. 2021, 34, 170–186. [Google Scholar]
- Kilian, L.; Shahid, F.; Zhao, J.S.; Nayeri, C.N. Bioinspired morphing wings: Mechanical design and wind tunnel experiments. Bioinspirat. Biomimet. 2022, 17, 046019. [Google Scholar] [CrossRef] [PubMed]
- Miller, E.J.; Lokos, W.A.; Cruz, J.; Crampton, G.; Stephens, C.A.; Kota, S.; Ervin, G.; Flick, P. Approach for structurally clearing an adaptive compliant trailing edge flap for flight. In Proceedings of the Society of Flight Test Engineers International Annual Symposium, Lancaster, CA, USA, 14–17 September 2015. [Google Scholar]
- Frigioescu, T.F.; Condruz, M.R.; Badea, T.A.; Paraschiv, A. A Preliminary Study on the Development of a New UAV Concept and the Associated Flight Method. Drones 2023, 7, 166. [Google Scholar] [CrossRef]
- Gökbel, E.; Güllü, A.; Ersoy, S. Improvement of UAV: Design and implementation on launchability. Aircr. Eng. Aerosp. Technol. 2023, 95, 734–740. [Google Scholar] [CrossRef]
- DeFrangesco, R.; DeFrangesco, S. The Big Book of Drones; CRC Press: Boca Raton, FL, USA, 2022. [Google Scholar]
- Falanga, D.; Kleber, K.; Mintchev, S.; Floreano, D.; Scaramuzza, D. The foldable drone: A morphing quadrotor that can squeeze and fly. IEEE Robot. Autom. Lett. 2018, 4, 209–216. [Google Scholar] [CrossRef] [Green Version]
- The Foldable Drone, Laboratory of Intelligent Systems at EPFL. Available online: https://actu.epfl.ch/news/new-foldable-drone-flies-through-narrow-holes-in-r (accessed on 22 July 2023).
- Podsędkowski, M.; Konopiński, R.; Obidowski, D.; Koter, K. Variable pitch propeller for UAV-experimental tests. Energies 2020, 13, 5264. [Google Scholar]
- Abhishek, A.; Duhoon, A.; Kothari, M.; Kadukar, S.; Rane, L.; Suryavanshi, G. Design, development, and closed-loop flight-testing of a single power plant variable pitch quadrotor unmanned air vehicle. In Proceedings of the 73rd American Helicopter Society Annual Forum, Fort Worth, TX, USA, 9–11 May 2017; pp. 205–218. [Google Scholar]
- Wu, X. Design and Development of Variable Pitch Quadcopter for Long Endurance Flight. Ph.D. Thesis, Oklahoma State University, Stillwater, OK, USA, 2018. [Google Scholar]
- Liu, Z.; He, Y.; Yang, L.; Han, J. Control techniques of tilt rotor unmanned aerial vehicle systems: A review. Chin. J. Aeronaut. 2017, 30, 135–148. [Google Scholar]
- Misra, A.; Jayachandran, S.; Kenche, S.; Katoch, A.; Suresh, A.; Gundabattini, E.; Selvaraj, S.K.; Legesse, A.A. A Review on Vertical Take-Off and Landing (VTOL) Tilt-Rotor and Tilt Wing Unmanned Aerial Vehicles (UAVs). J. Eng. 2022, 2022, 1803638. [Google Scholar]
- Kamel, M.; Verling, S.; Elkhatib, O.; Sprecher, C.; Wulkop, P.; Taylor, Z.; Siegwart, R.; Gilitschenski, I. The voliro omniorientational hexacopter: An agile and maneuverable tiltable-rotor aerial vehicle. IEEE Robot. Autom. Mag. 2018, 25, 34–44. [Google Scholar] [CrossRef] [Green Version]
- Voliro Hexcopter, ETH Zurich Team. Available online: https://voliro.com (accessed on 22 July 2023).
- GL-10, NASA Greased Lightning. Available online: https://ntrs.nasa.gov/citations/20180000765 (accessed on 22 July 2023).
- Kangunde, V.; Jamisola, R.S.; Theophilus, E.K. A review on drones controlled in real-time. Int. J. Dyn. Control 2021, 9, 1832–1846. [Google Scholar]
- Rubí, B.; Pérez, R.; Morcego, B. A survey of path following control strategies for UAVs focused on quadrotors. J. Intell. Robot. Syst. 2020, 98, 241–265. [Google Scholar]
- Sonugur, G. A Review of quadrotor UAV: Control and SLAM methodologies ranging from conventional to innovative approaches. Robot. Auton. Syst. 2022, 161, 104342. [Google Scholar]
- Hanif, A.S.; Han, X.; Yu, S.H. Independent Control Spraying System for UAV-Based Precise Variable Sprayer: A Review. Drones 2022, 6, 383. [Google Scholar]
- Idrissi, M.; Salami, M.; Annaz, F. A review of quadrotor unmanned aerial vehicles: Applications, architectural design and control algorithms. J. Intell. Robot. Syst. 2022, 104, 22. [Google Scholar]
- López, Y.Á.; Garcia-Fernandez, M.; Alvarez-Narciandi, G.; Andrés, F.L.H. Unmanned aerial vehicle-based ground-penetrating radar systems: A review. IEEE Geosci. Remote Sens. Mag. 2022, 10, 66–86. [Google Scholar] [CrossRef]
- Farid, G.; Hongwei, M.; Ali, S.M.; Liwei, Q. A review on linear and nonlinear control techniques for position and attitude control of a quadrotor. Control Intell. Syst. 2017, 45, 43–57. [Google Scholar]
- Derrouaoui, S.H.; Bouzid, Y.; Guiatni, M. Nonlinear robust control of a new reconfigurable unmanned aerial vehicle. Robotics 2021, 10, 76. [Google Scholar] [CrossRef]
- Priya, P.; Kamlu, S.S. Robust Control Algorithm for Drones. In Aeronautics-New Advances; IntechOpen: London, UK, 2022. [Google Scholar]
- Cao, S.; Yu, H. An Adaptive Control Framework for the Autonomous Aerobatic Maneuvers of Fixed-Wing Unmanned Aerial Vehicle. Drones 2022, 6, 316. [Google Scholar]
- Nguen, V.; Putov, A.; Nguen, T. Adaptive control of an unmanned aerial vehicle. In AIP Conference Proceedings; AIP Publishing LLC.: Melville, NY, USA, 2017; Volume 1798, p. 020124. [Google Scholar]
- Dief, T.N.; Yoshida, S. Modeling and classical controller of quad-rotor. arXiv 2017, arXiv:1707.04173. [Google Scholar]
- Dolega, B.; Kopecki, G.; Kordos, D.; Rogalski, T. Review of Chosen Control Algorithms Used for Small UAV Control. In Solid State Phenomena; Trans Tech Publications: Stafa-Zurich, Switzerland, 2017; Volume 260, pp. 175–183. [Google Scholar]
- Joukhadar, A.; Alchehabi, M.; Jejeh, A. Advanced UAVs nonlinear control systems and applications. In Unmanned Robotic Systems and Applications; IntechOpen: London, UK, 2019; p. 79. [Google Scholar]
- Jafari, M.; Xu, H. Intelligent control for unmanned aerial systems with system uncertainties and disturbances using artificial neural network. Drones 2018, 2, 30. [Google Scholar] [CrossRef] [Green Version]
- Vachtsevanos, G.; Tang, L.; Drozeski, G.; Gutierrez, L. Intelligent control of unmanned aerial vehicles for improved autonomy and reliability. IFAC Proc. Vol. 2004, 37, 852–861. [Google Scholar] [CrossRef]
- Azar, A.T.; Koubaa, A.; Ali Mohamed, N.; Ibrahim, H.A.; Ibrahim, Z.F.; Kazim, M.; Ammar, A.; Benjdira, B.; Khamis, A.M.; Hameed, I.A.; et al. Drone deep reinforcement learning: A review. Electronics 2021, 10, 999. [Google Scholar]
- Goel, A.; Paredes, J.A.; Dadhaniya, H.; Islam, S.A.U.; Salim, A.M.; Ravela, S.; Bernstein, D. Experimental implementation of an adaptive digital autopilot. In Proceedings of the 2021 American Control Conference (ACC), New Orleans, LA, USA, 25–28 May 2021; pp. 3737–3742. [Google Scholar]
- Park, D.; Yu, H.; Xuan-Mung, N.; Lee, J.; Hong, S.K. Multicopter PID attitude controller gain auto-tuning through reinforcement learning neural networks. In Proceedings of the 2019 2nd International Conference on Control and Robot Technology, Jeju, Republic of Korea, 12–14 December 2019; pp. 80–84. [Google Scholar]
- Trilaksono, B.R.; Nasution, S.H.; Purwanto, E.B. Design and implementation of hardware-in-the-loop-simulation for uav using pid control method. In Proceedings of the 2013 3rd International Conference on Instrumentation, Communications, Information Technology and Biomedical Engineering (ICICI-BME), Bandung, Indonesia, 7–8 November 2013; pp. 124–130. [Google Scholar]
- Bangura, M.; Mahony, R. Real-time model predictive control for quadrotors. IFAC Proc. Vol. 2014, 47, 11773–11780. [Google Scholar] [CrossRef]
- Amadi, C.A. Design and Implementation of a Model Predictive Control on a Pixhawk Flight Controller. Ph.D. Thesis, Stellenbosch University, Stellenbosch, South Africa, 2018. [Google Scholar]
- Niit, E.A.; Smit, W.J. Integration of model reference adaptive control (MRAC) with PX4 firmware for quadcopters. In Proceedings of the 2017 24th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Auckland, New Zealand, 21–23 November 2017; pp. 1–6. [Google Scholar]
- Yadav, A.K.; Gaur, P. AI-based adaptive control and design of autopilot system for nonlinear UAV. Sadhana 2014, 39, 765–783. [Google Scholar]
- Zheng, E.H.; Xiong, J.J.; Luo, J.L. Second order sliding mode control for a quadrotor UAV. ISA Trans. 2014, 53, 1350–1356. [Google Scholar] [CrossRef]
- Benallegue, A.; Mokhtari, A.; Fridman, L. High-order sliding-mode observer for a quadrotor UAV. Int. J. Robust Nonlinear Control IFAC-Affil. J. 2008, 18, 427–440. [Google Scholar] [CrossRef]
- Chandler, P.R.; Pachter, M.; Swaroop, D.; Fowler, J.M.; Howlett, J.K.; Rasmussen, S.; Schumacher, C.; Nygard, K. Complexity in UAV cooperative control. In Proceedings of the 2002 American Control Conference (IEEE Cat. No. CH37301), Anchorage, AK, USA, 8–10 May 2002; Volume 3, pp. 1831–1836. [Google Scholar]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Lee, H.; Utkin, V.I. Chattering suppression methods in sliding mode control systems. Annu. Rev. Control 2007, 31, 179–188. [Google Scholar] [CrossRef]
- Young, K.D.; Utkin, V.I.; Ozguner, U. A control engineer’s guide to sliding mode control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef] [Green Version]
- Tokat, S.; Fadali, M.S.; Eray, O. A classification and overview of sliding mode controller sliding surface design methods. Recent Adv. Sliding Modes Control Intell. Mech. 2015, 24, 417–439. [Google Scholar]
- Bartoszewicz, A.; Leśniewski, P. New switching and nonswitching type reaching laws for SMC of discrete time systems. IEEE Trans. Control Syst. Technol. 2015, 24, 670–677. [Google Scholar] [CrossRef]
- Latosiński, P.; Herkt, M. Non-switching Reaching Law Based DSMC Strategies in the Context of Robustness Comparison. In Proceedings of the 27th International Conference on Systems Engineering, ICSEng 2020; Springer: Berlin/Heidelberg, Germany, 2021; pp. 81–92. [Google Scholar]
- Khan, A.I.; Al-Mulla, Y. Unmanned aerial vehicle in the machine learning environment. Procedia Comput. Sci. 2019, 160, 46–53. [Google Scholar] [CrossRef]
- Ben Aissa, S.; Ben Letaifa, A. UAV Communications with machine learning: Challenges, applications and open issues. Arab. J. Sci. Eng. 2022, 47, 1559–1579. [Google Scholar]
- Gu, W.; Valavanis, K.P.; Rutherford, M.J.; Rizzo, A. UAV model-based flight control with artificial neural networks: A survey. J. Intell. Robot. Syst. 2020, 100, 1469–1491. [Google Scholar]
- Cordoba, G.M.A. Autonomous intelligent fuzzy logic guidance, and flight control system for the EFIGENIA EJ-1B MOZART unmanned aerial vehicle UAV. IFAC Proc. Vol. 2007, 40, 31–36. [Google Scholar] [CrossRef]
- Hajiyev, C.; Ersin Soken, H.; Yenal Vural, S.; Hajiyev, C.; Soken, H.E.; Vural, S.Y. Fuzzy Logic-Based Controller Design. In State Estimation and Control for Low-Cost Unmanned Aerial Vehicles; Springer: Cham, Switzerland, 2015; pp. 201–221. [Google Scholar]
- Kurnaz, S.; Cetin, O.; Kaynak, O. Adaptive neuro-fuzzy inference system based autonomous flight control of unmanned air vehicles. Expert Syst. Appl. 2010, 37, 1229–1234. [Google Scholar] [CrossRef]
- Sargolzaei, A.; Abbaspour, A.; Crane, C.D. Control of cooperative unmanned aerial vehicles: Review of applications, challenges, and algorithms. Optim. Learn. Control Interdependent Complex Netw. 2020, 1123, 229–255. [Google Scholar]
- Ziquan, Y.; Zhang, Y.; Jiang, B.; Jun, F.; Ying, J. A review on fault-tolerant cooperative control of multiple unmanned aerial vehicles. Chin. J. Aeronaut. 2022, 35, 1–18. [Google Scholar]
- Ryan, A.; Zennaro, M.; Howell, A.; Sengupta, R.; Hedrick, J.K. An overview of emerging results in cooperative UAV control. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No. 04CH37601), Nassau, Bahamas, 14–17 December 2004; Volume 1, pp. 602–607. [Google Scholar]
- Kada, B.; Khalid, M.; Shaikh, M.S. Distributed cooperative control of autonomous multi-agent UAV systems using smooth control. J. Syst. Eng. Electron. 2020, 31, 1297–1307. [Google Scholar] [CrossRef]
- Sadeghzadeh, I.; Zhang, Y. A review on fault-tolerant control for unmanned aerial vehicles (UAVs). Infotech@ Aerosp. 2011, 2011, 1472. [Google Scholar]
- Bondyra, A.; Kołodziejczak, M.; Kulikowski, R.; Giernacki, W. An Acoustic Fault Detection and Isolation System for Multirotor UAV. Energies 2022, 15, 3955. [Google Scholar] [CrossRef]
- Puchalski, R.; Giernacki, W. UAV Fault Detection Methods, State-of-the-Art. Drones 2022, 6, 330. [Google Scholar] [CrossRef]
- Ducard, G. Actuator Fault Detection in UAVs, in Handbook of Unmanned Aircraft. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Fourlas, G.K.; Karras, G.C. A survey on fault diagnosis and fault-tolerant control methods for unmanned aerial vehicles. Machines 2021, 9, 197. [Google Scholar] [CrossRef]
- Gao, B.; Liu, Y.J.; Liu, L. Adaptive neural fault-tolerant control of a quadrotor UAV via fast terminal sliding mode. Aerosp. Sci. Technol. 2022, 129, 107818. [Google Scholar] [CrossRef]
- Bu, X. Prescribed performance control approaches, applications and challenges: A comprehensive survey. Asian J. Control 2023, 25, 241–261. [Google Scholar] [CrossRef]
- Song, H.; Zhang, T.; Zhang, G.; Lu, C. Integrated interceptor guidance and control with prescribed performance. Int. J. Robust Nonlinear Control 2015, 25, 3179–3194. [Google Scholar] [CrossRef]
- Huang, H.; Luo, C.; Han, B. Prescribed performance fuzzy back-stepping control of a flexible air-breathing hypersonic vehicle subject to input constraints. J. Intell. Manuf. 2022, 33, 853–866. [Google Scholar] [CrossRef]
- Chen, B.W.; Tan, L.G. Adaptive anti-saturation tracking control with prescribed performance for hypersonic vehicle. Int. J. Control Autom. Syst. 2020, 18, 394–404. [Google Scholar] [CrossRef]
- Bu, X.; Xiao, Y. Prescribed performance-based low-computational cost fuzzy control of a hypersonic vehicle using non-affine models. Adv. Mech. Eng. 2018, 10, 1687814018757261. [Google Scholar] [CrossRef] [Green Version]
- Bu, X.; Xiao, Y.; Wang, K. A prescribed performance control approach guaranteeing small overshoot for air-breathing hypersonic vehicles via neural approximation. Aerosp. Sci. Technol. 2017, 71, 485–498. [Google Scholar] [CrossRef]
- Li, S.; Ma, T.; Luo, X.; Yang, Z. Adaptive fuzzy output regulation for unmanned surface vehicles with prescribed performance. Int. J. Control Autom. Syst. 2020, 18, 405–414. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Y.; Liu, Z.; Qu, Y.; Su, C.Y.; Jiang, B. Decentralized finite-time adaptive fault-tolerant synchronization tracking control for multiple UAVs with prescribed performance. J. Frankl. Inst. 2020, 357, 11830–11862. [Google Scholar] [CrossRef]
- Koksal, N.; An, H.; Fidan, B. Backstepping-based adaptive control of a quadrotor UAV with guaranteed tracking performance. ISA Trans. 2020, 105, 98–110. [Google Scholar] [CrossRef]
- Han, B.; Zhou, Y.; Deveerasetty, K.K.; Hu, C. A review of control algorithms for quadrotor. In Proceedings of the 2018 IEEE International Conference on Information and Automation (ICIA), Wuyi Mountain, China, 11–13 August 2018; pp. 951–956. [Google Scholar]
- Roy, R.; Islam, M.; Sadman, N.; Mahmud, M.P.; Gupta, K.D.; Ahsan, M.M. A review on comparative remarks, performance evaluation and improvement strategies of quadrotor controllers. Technologies 2021, 9, 37. [Google Scholar] [CrossRef]
- Hasseni, S.E.I.; Abdou, L.; Glida, H.E. Parameters tuning of a quadrotor PID controllers by using nature-inspired algorithms. Evol. Intell. 2021, 14, 61–73. [Google Scholar] [CrossRef]
- Hasseni, S.E.I.; Abdou, L. Decentralized PID control by using GA optimization applied to a quadrotor. J. Autom. Mob. Robot. Intell. Syst. 2018, 12, 33–44. [Google Scholar] [CrossRef]
- Castillo-Zamora, J.J.; Camarillo-Gomez, K.A.; Perez-Soto, G.I.; Rodriguez-Resendiz, J. Comparison of PD, PID and sliding-mode position controllers for V–tail quadcopter stability. IEEE Access 2018, 6, 38086–38096. [Google Scholar] [CrossRef]
- Guo, X.; Hou, S.; Niu, P.; Zhao, D. A Review of Control Methods for Quadrotor UAVs. In Proceedings of the 2022 5th International Conference on Electronics and Electrical Engineering Technology (EEET), Beijing, China, 2–4 December 2022; pp. 132–138. [Google Scholar] [CrossRef]
- Okasha, M.; Kralev, J.; Islam, M. Design and Experimental Comparison of PID, LQR and MPC Stabilizing Controllers for Parrot Mambo Mini-Drone. Aerospace 2022, 9, 298. [Google Scholar] [CrossRef]
- Massé, C.; Gougeon, O.; Nguyen, D.T.; Saussié, D. Modeling and Control of a Quadcopter Flying in a Wind Field: A Comparison Between LQR and Structured ∞ Control Techniques. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 1408–1417. [Google Scholar] [CrossRef]
- Rugh, W.J.; Shamma, J.S. Research on gain scheduling. Automatica 2000, 36, 1401–1425. [Google Scholar] [CrossRef]
- Bouzid, Y.; Derrouaoui, S.H.; Guiatni, M. PID gain scheduling for 3D trajectory tracking of a quadrotor with rotating and extendable arms. In Proceedings of the 2021 International Conference on Recent Advances in Mathematics and Informatics (ICRAMI), Tebessa, Algeria, 21–22 September 2021; pp. 1–4. [Google Scholar]
- Glida, H.E.; Abdou, L.; Chelihi, A.; Sentouh, C.; Hasseni, S.E.I. Optimal model-free backstepping control for a quadrotor helicopter. Nonlinear Dyn. 2020, 100, 3449–3468. [Google Scholar] [CrossRef]
- Abdou, L. Integral backstepping/LFT-LPV ∞ control for the trajectory tracking of a quadcopter. In Proceedings of the 2018 7th International Conference on Systems and Control (ICSC), Valencia, Spain, 24–26 October 2018; pp. 348–353. [Google Scholar]
- Seif-El-Islam, H.; Abdou, L. Robust LPV control for attitude stabilization of a quadrotor helicopter under input saturations. Adv. Technol. Innov. 2020, 5, 98. [Google Scholar]
- Baldi, S.; Sun, D.; Xia, X.; Zhou, G.; Liu, D. ArduPilot-based adaptive autopilot: Architecture and software-in-the-loop experiments. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4473–4485. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Taniguchi, T.; Eciolaza, L.; Campos, V.; Palhares, R.; Sugeno, M. Fuzzy control systems: Past, present and future. IEEE Comput. Intell. Mag. 2019, 14, 56–68. [Google Scholar] [CrossRef]
- Ferdaus, M.M.; Anavatti, S.G.; Pratama, M.; Garratt, M.A. Towards the use of fuzzy logic systems in rotary wing unmanned aerial vehicle: A review. Artif. Intell. Rev. 2020, 53, 257–290. [Google Scholar] [CrossRef]
- Wai, R.J.; Prasetia, A.S. Adaptive neural network control and optimal path planning of UAV surveillance system with energy consumption prediction. IEEE Access 2019, 7, 126137–126153. [Google Scholar] [CrossRef]
- Fahlstrom, P.G.; Gleason, T.J.; Sadraey, M.H. Introduction to UAV Systems 5th Edition; John Wiley & Sons: Hoboken, NJ, USA, 2022. [Google Scholar]
- Bigazzi, L.; Basso, M.; Boni, E.; Innocenti, G.; Pieraccini, M. A Multilevel Architecture for Autonomous UAVs. Drones 2021, 5, 55. [Google Scholar] [CrossRef]
- Ahmed, F.; Jenihhin, M. A Survey on UAV Computing Platforms: A Hardware Reliability Perspective. Sensors 2022, 22, 6286. [Google Scholar] [CrossRef] [PubMed]
- Changpradith, W. Application of Object Detection Using Hardware Acceleration for Autonomous UAV; California State Polytechnic University: Pomona, CA, USA, 2022. [Google Scholar]
- Hristov, G.V.; Zahariev, P.Z.; Beloev, I.H. A review of the characteristics of modern unmanned aerial vehicles. Acta Technol. Agric. 2016, 19, 33–38. [Google Scholar] [CrossRef] [Green Version]
- Colorado Montaño, J. Towards MAV Autonomous Flight: A Modeling and Control Approach. Master’s Thesis, Industriales, University of Madrid, Madrid, Spain, 2010. [Google Scholar]
- Sharma, B.L.; Khatri, N.; Sharma, A. An analytical review on FPGA based autonomous flight control system for small UAVs. In Proceedings of the 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 1369–1372. [Google Scholar]
- Chao, H.; Cao, Y.; Chen, Y. Autopilots for small unmanned aerial vehicles: A survey. Int. J. Control Autom. Syst. 2010, 8, 36–44. [Google Scholar] [CrossRef]
- Monterrosa, N.; Montoya, J.; Jarquín, F.; Bran, C. Design, development and implementation of a UAV flight controller based on a state machine approach using a FPGA embedded system. In Proceedings of the 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC), Sacramento, CA, USA, 25–29 September 2016; pp. 1–8. [Google Scholar]
- Sohail, S.S.; Himeur, Y.; Amira, A.; Fadli, F.; Mansoor, W.; Atalla, S.; Copiaco, A. Deep Transfer Learning for 3d Point Cloud Understanding: A Comprehensive Survey. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4348272 (accessed on 22 July 2023).
- Pádua, L.; Vanko, J.; Hruška, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, sensors, and data processing in agroforestry: A review towards practical applications. Int. J. Remote Sens. 2017, 38, 2349–2391. [Google Scholar] [CrossRef]
- Amarasingam, N.; Salgadoe, S.; Powell, K.; Gonzalez, L.F.; Natarajan, S. A review of UAV platforms, sensors, and applications for monitoring of sugarcane crops. Remote Sens. Appl. Soc. Environ. 2022, 26, 100712. [Google Scholar] [CrossRef]
- Olson, D.; Anderson, J. Review on unmanned aerial vehicles, remote sensors, imagery processing, and their applications in agriculture. Agron. J. 2021, 113, 971–992. [Google Scholar] [CrossRef]
- Kim, S.G.; Lee, E.; Hong, I.P.; Yook, J.G. Review of intentional electromagnetic interference on UAV sensor modules and experimental study. Sensors 2022, 22, 2384. [Google Scholar] [CrossRef] [PubMed]
- Samaras, S.; Diamantidou, E.; Ataloglou, D.; Sakellariou, N.; Vafeiadis, A.; Magoulianitis, V.; Lalas, A.; Dimou, A.; Zarpalas, D.; Votis, K.; et al. Deep learning on multi sensor data for counter UAV applications—A systematic review. Sensors 2019, 19, 4837. [Google Scholar] [CrossRef] [Green Version]
- Ecke, S.; Dempewolf, J.; Frey, J.; Schwaller, A.; Endres, E.; Klemmt, H.J.; Tiede, D.; Seifert, T. UAV-based forest health monitoring: A systematic review. Remote Sens. 2022, 14, 3205. [Google Scholar] [CrossRef]
- Joshi, D.; Deb, D.; Muyeen, S. Comprehensive Review on Electric Propulsion System of Unmanned Aerial Vehicles. Front. Energy Res. 2022, 10, 739. [Google Scholar] [CrossRef]
- Teubl, D.; Bitenc, T.; Hornung, M. Design and Development of an Actuator Control and Monitoring Unit for Small and Medium Size Research UAVs; Deutsche Gesellschaft für Luft-und Raumfahrt-Lilienthal-Oberth eV: Bonn, Germany, 2021. [Google Scholar]
- Grundmann, S.; Frey, M.; Tropea, C. Unmanned aerial vehicle (UAV) with plasma actuators for separation control. In Proceedings of the 47th AIAA Aerospace Sciences Meeting including The New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009; p. 698. [Google Scholar]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. Power supply architectures for drones—A review. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 5826–5831. [Google Scholar]
- Mohsan, S.A.H.; Othman, N.Q.H.; Khan, M.A.; Amjad, H.; Żywiołek, J. A comprehensive review of micro UAV charging techniques. Micromachines 2022, 13, 977. [Google Scholar] [CrossRef]
- Chittoor, P.K.; Chokkalingam, B.; Mihet-Popa, L. A review on UAV wireless charging: Fundamentals, applications, charging techniques and standards. IEEE Access 2021, 9, 69235–69266. [Google Scholar] [CrossRef]
- Xu, L.; Huangfu, Y.; Ma, R.; Xie, R.; Song, Z.; Zhao, D.; Yang, Y.; Wang, Y.; Xu, L. A Comprehensive Review on Fuel Cell UAV Key Technologies: Propulsion System, Management Strategy and Design Procedure. IEEE Trans. Transp. Electrif. 2022, 8, 4118–4139. [Google Scholar] [CrossRef]
- Zhang, C.; Qiu, Y.; Chen, J.; Li, Y.; Liu, Z.; Liu, Y.; Zhang, J.; Hwa, C.S. A comprehensive review of electrochemical hybrid power supply systems and intelligent energy managements for unmanned aerial vehicles in public services. Energy AI 2022, 9, 100175. [Google Scholar] [CrossRef]
- Townsend, A.; Jiya, I.N.; Martinson, C.; Bessarabov, D.; Gouws, R. A comprehensive review of energy sources for unmanned aerial vehicles, their shortfalls and opportunities for improvements. Heliyon 2020, 6, e05285. [Google Scholar] [CrossRef]
- Alsuhli, G.; Fahim, A.; Gadallah, Y. A survey on the role of UAVs in the communication process: A technological perspective. Comput. Commun. 2022, 194, 86–123. [Google Scholar] [CrossRef]
- Sharma, A.; Vanjani, P.; Paliwal, N.; Basnayaka, C.M.W.; Jayakody, D.N.K.; Wang, H.C.; Muthuchidambaranathan, P. Communication and networking technologies for UAVs: A survey. J. Netw. Comput. Appl. 2020, 168, 102739. [Google Scholar] [CrossRef]
- Chen, X.; Tang, J.; Lao, S. Review of unmanned aerial vehicle swarm communication architectures and routing protocols. Appl. Sci. 2020, 10, 3661. [Google Scholar] [CrossRef]
- Ghazali, M.H.M.; Teoh, K.; Rahiman, W. A systematic review of real-time deployments of UAV-based LoRa communication network. IEEE Access 2021, 9, 124817–124830. [Google Scholar] [CrossRef]
- Islam, N.; Rashid, M.M.; Pasandideh, F.; Ray, B.; Moore, S.; Kadel, R. A review of applications and communication technologies for internet of things (Iot) and unmanned aerial vehicle (uav) based sustainable smart farming. Sustainability 2021, 13, 1821. [Google Scholar] [CrossRef]
- Scott, J.; Scott, C. Drone Delivery Models for Healthcare. In Proceedings of the 50th Hawaii International Conference on System Sciences, Hilton Waikoloa Village, Hawaii; 2017; pp. 3297–3304, ISBN 978-0-9981331-0-2. Available online: https://scholarspace.manoa.hawaii.edu/items/947f05d9-71f2-467a-8291-084642e402ad (accessed on 22 July 2023).
- Brischetto, S.; Torre, R. Preliminary Finite Element Analysis and Flight Simulations of a Modular Drone Built through Fused Filament Fabrication. J. Compos. Sci. 2021, 5, 293. [Google Scholar] [CrossRef]
- Martinetti, A.; Margaryan, M.; van Dongen, L. Simulating mechanical stress on a micro Unmanned Aerial Vehicle (UAV) body frame for selecting maintenance actions. Procedia Manuf. 2018, 16, 61–66. [Google Scholar] [CrossRef]
- Mishra, A.; Pal, S.; Malhi, G.; Singh, P. Structural analysis of UAV airframe by using FEM techniques: A review. Int. J. Mech. Prod. ISSN 2020, 10, 2249–6890. [Google Scholar]
- Ferreira, J.F.M.A. Structural Analysis and Optimization of a UAV Wing. Master’s Thesis, Técnico Lisboa, Lisboa, Portugal, 2018. [Google Scholar]
- Landolfo, G.; Altman, A. Aerodynamic and structural design of a small nonplanar wing UAV. In Proceedings of the 47th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009; p. 1068. [Google Scholar]
- Kim, M.; Joo, H.; Jang, B. Conceptual multicopter sizing and performance analysis via component database. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 105–109. [Google Scholar]
- Souza, L.S.; Rocha, F.G.; Soares, M.S. A Review on Software/Systems Architecture Description for Autonomous Systems. Recent Adv. Comput. Sci. Commun. 2023, 16, 52–60. [Google Scholar]
- Spica, R.; Giordano, P.R.; Ryll, M.; Bülthoff, H.H.; Franchi, A. An open-source hardware/software architecture for quadrotor UAVs. IFAC Proc. Vol. 2013, 46, 198–205. [Google Scholar] [CrossRef]
- Madridano, Á.; Al-Kaff, A.; Flores, P.; Martín, D.; de la Escalera, A. Software architecture for autonomous and coordinated navigation of uav swarms in forest and urban firefighting. Appl. Sci. 2021, 11, 1258. [Google Scholar] [CrossRef]
- Kekec, T.; Ustundag, B.C.; Guney, M.A.; Yildirim, A.; Unel, M. A modular software architecture for UAVs. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 4037–4042. [Google Scholar]
- Pastor, E.; Lopez, J.; Royo, P. A hardware/Software architecture for UAV payload and mission control. In Proceedings of the 2006 Ieee/Aiaa 25TH Digital Avionics Systems Conference, Portland, OR, USA, 15–19 October 2006; pp. 1–8. [Google Scholar]
- York, D.D.; Al-Bayati, A.J.; Al-Shabbani, Z.Y. Potential Applications of UAV within the Construction Industry and the Challenges Limiting Implementation. In Construction Research Congress 2020: Project Management and Controls, Materials, and Contracts; American Society of Civil Engineers: Reston, VA, USA, 2020; pp. 31–39. [Google Scholar]
- Opfer, N.D.; Shields, D.R. Unmanned aerial vehicle applications and issues for construction. In Proceedings of the 2014 ASEE Annual Conference & Exposition; 2014; pp. 24–1302. Available online: https://peer.asee.org/unmanned-aerial-vehicle-applications-and-issues-for-construction (accessed on 22 July 2023).
- Javaid, M.; Haleem, A.; Khan, I.H.; Singh, R.P.; Suman, R.; Mohan, S. Significant features and applications of Drones for Healthcare: An overview. J. Ind. Integr. Manag. 2022, 2250024. [Google Scholar] [CrossRef]
- Ahirwar, S.; Swarnkar, R.; Bhukya, S.; Namwade, G. Application of drone in agriculture. Int. J. Curr. Microbiol. Appl. Sci. 2019, 8, 2500–2505. [Google Scholar] [CrossRef]
- Li, Y.; Liu, C. Applications of multirotor drone technologies in construction management. Int. J. Constr. Manag. 2019, 19, 401–412. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Majeed, R.; Abdullah, N.A.; Mushtaq, M.F.; Kazmi, R. Drone security: Issues and challenges. Parameters 2021, 2, 5. [Google Scholar] [CrossRef]
- Mirri, S.; Prandi, C.; Salomoni, P. Human-Drone Interaction: State of the art, open issues and challenges. In Proceedings of the ACM SIGCOMM 2019 Workshop on Mobile AirGround Edge Computing, Systems, Networks, and Applications, Beijing, China, 19 August 2019; pp. 43–48. [Google Scholar]
- PX4, PIXHAWK Engineering Team. Available online: https://github.com/PX4/jMAVSim (accessed on 22 July 2023).
- He, L.; Aouf, N.; Song, B. Explainable Deep Reinforcement Learning for UAV autonomous path planning. Aerosp. Sci. Technol. 2021, 118, 107052. [Google Scholar] [CrossRef]
- Available online: https://ardupilot.org/ardupilot (accessed on 22 July 2023).
- TensorFlow. Available online: https://www.tensorflow.org (accessed on 22 July 2023).
- Topalli, M.T.; Yilmaz, M.; Çorapsiz, M.F. Real Time Implementation of Drone Detection using TensorFlow and MobileNetV2-SSD. In Proceedings of the 2021 7th International Conference on Electrical, Electronics and Information Engineering (ICEEIE), Malang, Indonesia, 2 October 2021; pp. 436–439. [Google Scholar]
- Jiang, Z.; Liu, Y.; Wu, B.; Zhu, Q. Monocular Vision Based UAV Target Detection and Ranging System Implemented on OpenCV and Tensor Flow. In Proceedings of the 2019 18th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES), Wuhan, China, 8–10 November 2019; pp. 88–91. [Google Scholar]
- Available online: https://wiki.paparazziuav.org (accessed on 1 August 2023).
- Remes, B.; Hensen, D.; Van Tienen, F.; De Wagter, C.; Van der Horst, E.; De Croon, G. Paparazzi: How to make a swarm of parrot ar drones fly autonomously based on gps. In Proceedings of the International Micro Air Vehicle Conference and Flight Competition (IMAV2013), Toulouse, France, 17–20 September 2013; pp. 17–20. [Google Scholar]
- Garcia, J.; Brock, A.; Saporito, N.; Hattenberger, G.; Paris, X.; Gorraz, M.; Jestin, Y. Designing human-drone interactions with the Paparazzi UAV System. In Proceedings of the 1st International Workshop on Human-Drone Interaction-CHI’19, Glasgow, UK, 14 May 2019. [Google Scholar]
- Available online: http://www.qgroundcontrol.org (accessed on 22 July 2023).
- Mission Planner. Available online: http://ardupilot.org/planner (accessed on 22 July 2023).
- APM Planner 2. Available online: https://ardupilot.org/planner2/ (accessed on 22 July 2023).
- UgCS. Available online: https://www.ugcs.com (accessed on 22 July 2023).
- Ramirez-Atencia, C.; Camacho, D. Extending QGroundControl for automated mission planning of UAVs. Sensors 2018, 18, 2339. [Google Scholar] [CrossRef] [Green Version]
- Dardoize, T.; Ciochetto, N.; Hong, J.H.; Shin, H.S. Implementation of ground control system for autonomous multi-agents using qgroundcontrol. In Proceedings of the 2019 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED UAS), Cranfield, UK, 25–27 November 2019; pp. 24–30. [Google Scholar]
- Vachtsevanos, G.; Tang, L.; Drozeski, G.; Gutierrez, L. From mission planning to flight control of unmanned aerial vehicles: Strategies and implementation tools. Annu. Rev. Control 2005, 29, 101–115. [Google Scholar] [CrossRef]
- AirSim. Available online: https://microsoft.github.io/AirSim (accessed on 22 July 2023).
- Madaan, R.; Gyde, N.; Vemprala, S.; Brown, M.; Nagami, K.; Taubner, T.; Cristofalo, E.; Scaramuzza, D.; Schwager, M.; Kapoor, A. Airsim drone racing lab. In Proceedings of the Neurips 2019 Competition and Demonstration Track, PMLR; 2020; pp. 177–191. Available online: http://proceedings.mlr.press/v123/madaan20a.html (accessed on 22 July 2023).
- Villota Miranda, D.; Gil Martínez, M.; Rico-Azagra, J. A3C for drone autonomous driving using Airsim. In XLII Jornadas de Automática; Universidade da Coruña, Servizo de Publicacións: A Coruña, Spain, 2021; pp. 203–209. [Google Scholar]
- Ma, C.; Zhou, Y.; Li, Z. A new simulation environment based on AirSim, ROS, and PX4 for quadcopter aircrafts. In Proceedings of the 2020 6th International Conference on Control, Automation and Robotics (ICCAR), Singapore, 20–23 April 2020; pp. 486–490. [Google Scholar]
- JdeRobot. Available online: https://jderobot.github.io/projects/drones/drones (accessed on 1 August 2023).
- Cañas, J.M.; Perdices, E.; García-Pérez, L.; Fernández-Conde, J. A ROS-based open tool for intelligent robotics education. Appl. Sci. 2020, 10, 7419. [Google Scholar] [CrossRef]
- Arias-Perez, P.; Fernández-Conde, J.; Martin Gomez, D.; Cañas, J.M.; Campoy, P. A Middleware Infrastructure for Programming Vision-Based Applications in UAVs. Drones 2022, 6, 369. [Google Scholar] [CrossRef]
- DroneKit. Available online: https://dronekit.io (accessed on 22 July 2023).
- DroneKit-Python. Available online: dronekit-python.readthedocs.io (accessed on 22 July 2023).
- Gaber, A.M.; Rashid, R.A.; Nasir, N.; Rahim, R.A.; Sarijari, M.A.; Abdullah, A.S.; Aziz, O.A.; Hamid, S.Z.A.; Ali, S. Development of an Autonomous IoT-Based Drone for Campus Security. ELEKTRIKA-J. Electr. Eng. 2021, 20, 70–76. [Google Scholar]
- Lee, M.T.; Chuang, M.L.; Kuo, S.T.; Chen, Y.R. UAV swarm real-time rerouting by edge computing D* lite algorithm. Appl. Sci. 2022, 12, 1056. [Google Scholar] [CrossRef]
- Ingle, P.Y.; Kim, Y.; Kim, Y.G. Dvs: A drone video synopsis towards storing and analyzing drone surveillance data in smart cities. Systems 2022, 10, 170. [Google Scholar] [CrossRef]
- MAVLink. Available online: https://mavlink.io/ (accessed on 22 July 2023).
- Pratik, P.; Agarwal, P. Review on MAV Link for Unmanned Air Vehicle to Ground Control Station Communication. Think India J. 2019, 22, 7093–7103. [Google Scholar]
- Badole, S.; Choudhary, S.; Titarmare, A.; Khergade, P. Review On Ground Control Station Design for Remotely Piloted Aircraft System. In Proceedings of the 2022 10th International Conference on Emerging Trends in Engineering and Technology-Signal and Information Processing (ICETET-SIP-22), Nagpur, India, 29–30 April 2022; pp. 1–6. [Google Scholar]
- Mogili, U.R.; Deepak, B. An intelligent drone for agriculture applications with the aid of the MAVlink protocol. In Innovative Product Design and Intelligent Manufacturing Systems: Select Proceedings of ICIPDIMS 2019; Springer: Berlin/Heidelberg, Germany, 2020; pp. 195–205. [Google Scholar]
- Koubâa, A.; Allouch, A.; Alajlan, M.; Javed, Y.; Belghith, A.; Khalgui, M. Micro air vehicle link (mavlink) in a nutshell: A survey. IEEE Access 2019, 7, 87658–87680. [Google Scholar] [CrossRef]
- ROS Robot Operating System. Available online: https://www.ros.org (accessed on 22 July 2023).
- Abbyasov, B.; Lavrenov, R.; Zakiev, A.; Tsoy, T.; Magid, E.; Svinin, M.; Martinez-Garcia, E.A. Comparative analysis of ROS-based centralized methods for conducting collaborative monocular visual SLAM using a pair of UAVs. In Proceedings of the 23rd International Conference on Climbing and Walking Robots and Support Technologies for Mobile Machines, Moscow, Russia, 24–26 August 2020; pp. 113–120. [Google Scholar]
- Canpolat Tosun, D.; Işık, Y. A ROS-based hybrid algorithm for the UAV path planning problem. Aircr. Eng. Aerosp. Technol. 2023, 95, 784–798. [Google Scholar] [CrossRef]
- Megalingam, R.K.; Prithvi, D.V.; Kumar, N.C.S.; Egumadiri, V. Drone Stability Simulation Using ROS and Gazebo. In Proceedings of the Advanced Computing and Intelligent Technologies: Proceedings of ICACIT 2021; Springer: New Delhi, India, 2022; pp. 131–143. [Google Scholar]
- Mardiyanto, R.; Hisak, M.N.; Mujiono, T.; Suryoatmojo, H. Robot Operating System (ROS) Framework for Swarm Drone Flight Controller. In Proceedings of the 2022 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 20–21 July 2022; pp. 297–303. [Google Scholar]
- Jain, N.; Gupta, A.K.; Mathur, P. Autonomous drone using ROS for surveillance and 3D mapping using satellite map. In Proceedings of the Second International Conference on Information Management and Machine Intelligence: ICIMMI 2020; Springer: Jaipur, India, 2021; pp. 255–266. [Google Scholar]
- Yu, Y.; Wang, X.; Zhong, Z.; Zhang, Y. ROS-based UAV control using hand gesture recognition. In Proceedings of the 2017 29th Chinese Control Furthermore, Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 6795–6799. [Google Scholar]
- Zhao, T.; Jiang, H. Landing system for AR. Drone 2.0 using onboard camera and ROS. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 1098–1102. [Google Scholar]
- Meng, W.; Hu, Y.; Lin, J.; Lin, F.; Teo, R. ROS+ unity: An efficient high-fidelity 3D multi-UAV navigation and control simulator in GPS-denied environments. In Proceedings of the IECON 2015-41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 002562–002567. [Google Scholar]
- Lamping, A.P.; Ouwerkerk, J.N.; Cohen, K. Multi-UAV control and supervision with ROS. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; p. 4245. [Google Scholar]
- Gazebosim, Gazebo. Available online: https://gazebosim.org/home (accessed on 22 July 2023).
- Webots, CyberBotics. Available online: https://cyberbotics.com (accessed on 22 July 2023).
- Morse, LAAS and ONERA Lab. Available online: https://github.com/morse-simulator/morse (accessed on 22 July 2023).
- Paparazzi. Available online: https://github.com/paparazzi (accessed on 22 July 2023).
- HackflightSim. Available online: https://github.com/simondlevy/HackflightSim (accessed on 22 July 2023).
- UAV Toolbox. Available online: https://www.mathworks.com/products/uav.html (accessed on 22 July 2023).
- Horri, N.; Pietraszko, M. A Tutorial and Review on Flight Control Co-Simulation Using Matlab/Simulink and Flight Simulators. Automation 2022, 3, 486–510. [Google Scholar] [CrossRef]
- Aliane, N.; Muñoz, C.Q.G.; Sánchez-Soriano, J. Web and MATLAB-Based Platform for UAV Flight Management and Multispectral Image Processing. Sensors 2022, 22, 4243. [Google Scholar] [CrossRef]
- Xing, Z.; He, Y.; Jian, C. Design and implementation of UAV flight simulation based on Matlab/Simulink. In Proceedings of the 2015 International Conference on Advances in Mechanical Engineering and Industrial Informatics; 2015; pp. 190–193. Available online: https://www.atlantis-press.com/proceedings/ameii-15/21706 (accessed on 22 July 2023).
- Pineda-Torres, F.; Arias-Barragán, L.A. PRM Navigation in Trading Drone and Gazebo Simulation. Vis. Electr. 2020, 14, 43–50. [Google Scholar] [CrossRef]
- Ivaldi, S.; Padois, V.; Nori, F. Tools for dynamics simulation of robots: A survey based on user feedback. arXiv 2014, arXiv:1402.7050. [Google Scholar]
- Multiwii Series. Available online: https://github.com/multiwii (accessed on 22 July 2023).
- Cleanflight. Available online: http://cleanflight.com/ (accessed on 22 July 2023).
- Betaflight. Available online: https://github.com/betaflight/betaflight/wiki/670 (accessed on 22 July 2023).
- INAV, iNav Flight. Available online: https://github.com/iNavFlight/inav/wiki (accessed on 22 July 2023).
- OpenPilot, OpenPilot wiki. Available online: https://opwiki.readthedocs.io/en/latest (accessed on 22 July 2023).
- LibrePilot Project. Available online: http://librepilot.org (accessed on 22 July 2023).
- dRonin. Available online: http://dronin.org/ (accessed on 22 July 2023).
- OpenCV. Available online: https://opencv.org (accessed on 22 July 2023).
- Pytorch. Available online: https://pytorch.org (accessed on 22 July 2023).
- Azmat, M.; Kummer, S. Potential applications of unmanned ground and aerial vehicles to mitigate challenges of transport and logistics-related critical success factors in the humanitarian supply chain. Asian J. Sustain. Soc. Responsib. 2020, 5, 3. [Google Scholar] [CrossRef] [Green Version]
- Vattapparamban, E.; Güvenç, I.; Yurekli, A.I.; Akkaya, K.; Uluağaç, S. Drones for smart cities: Issues in cybersecurity, privacy, and public safety. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 216–221. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Kirschstein, T. Energy demand of parcel delivery services with a mixed fleet of electric vehicles. Clean. Eng. Technol. 2021, 5, 100322. [Google Scholar] [CrossRef]
- Gautam, T.; Johari, R. Drone: A Systematic Review of UAV Technologies. In Proceedings of the International Conference on Computing, Communications, and Cyber-Security; Springer: Delhi, India, 2022; pp. 147–158. [Google Scholar]
- Elmeseiry, N.; Alshaer, N.; Ismail, T. A detailed survey and future directions of unmanned aerial vehicles (uavs) with potential applications. Aerospace 2021, 8, 363. [Google Scholar] [CrossRef]
- Heidari, A.; Navimipour, N.J.; Unal, M. A Secure Intrusion Detection Platform Using Blockchain and Radial Basis Function Neural Networks for Internet of Drones. IEEE Internet Things J. 2023, 10, 8445–8454. [Google Scholar] [CrossRef]
- Himeur, Y.; Sayed, A.; Alsalemi, A.; Bensaali, F.; Amira, A.; Varlamis, I.; Eirinaki, M.; Sardianos, C.; Dimitrakopoulos, G. Blockchain-based recommender systems: Applications, challenges and future opportunities. Comput. Sci. Rev. 2022, 43, 100439. [Google Scholar] [CrossRef]
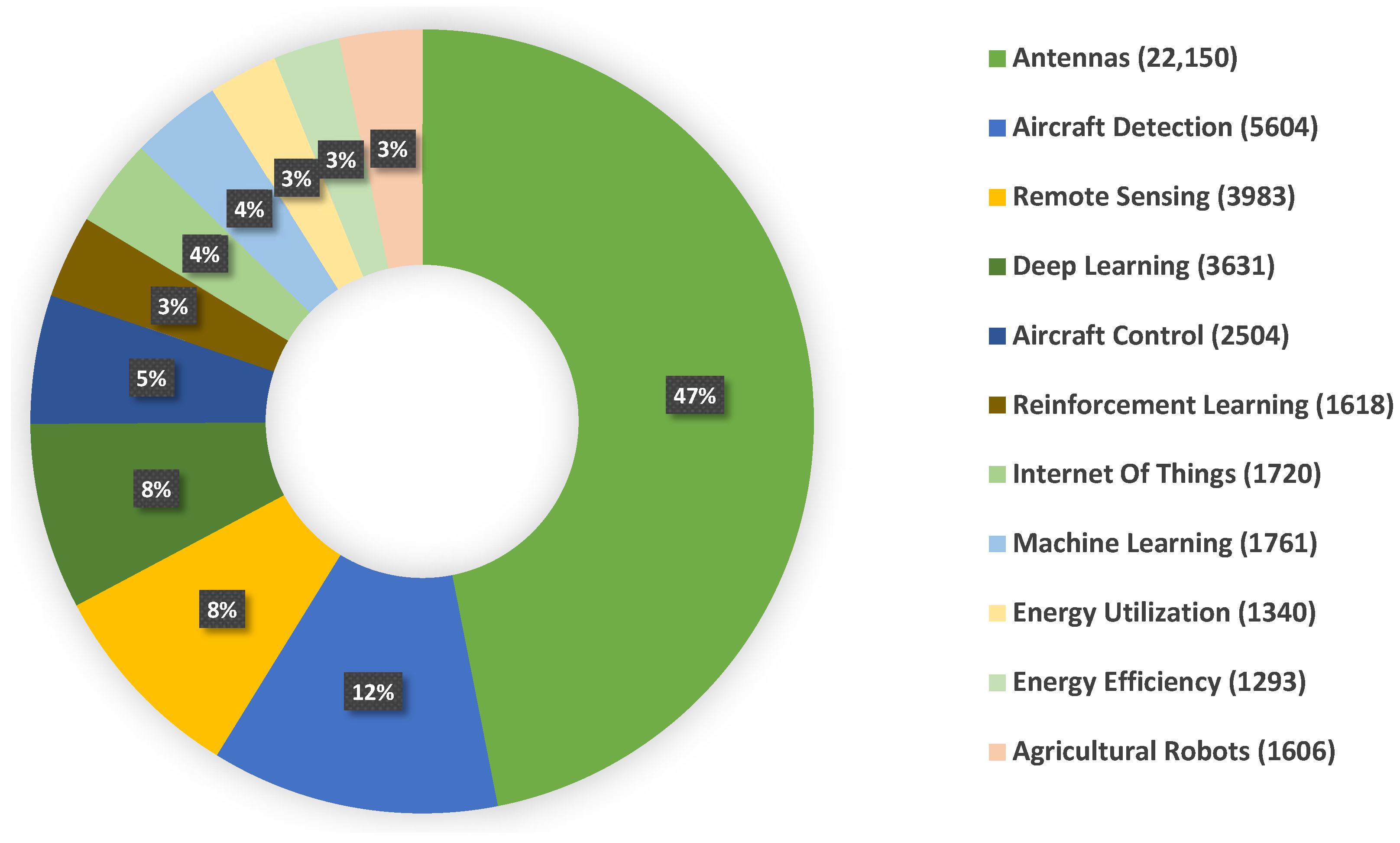
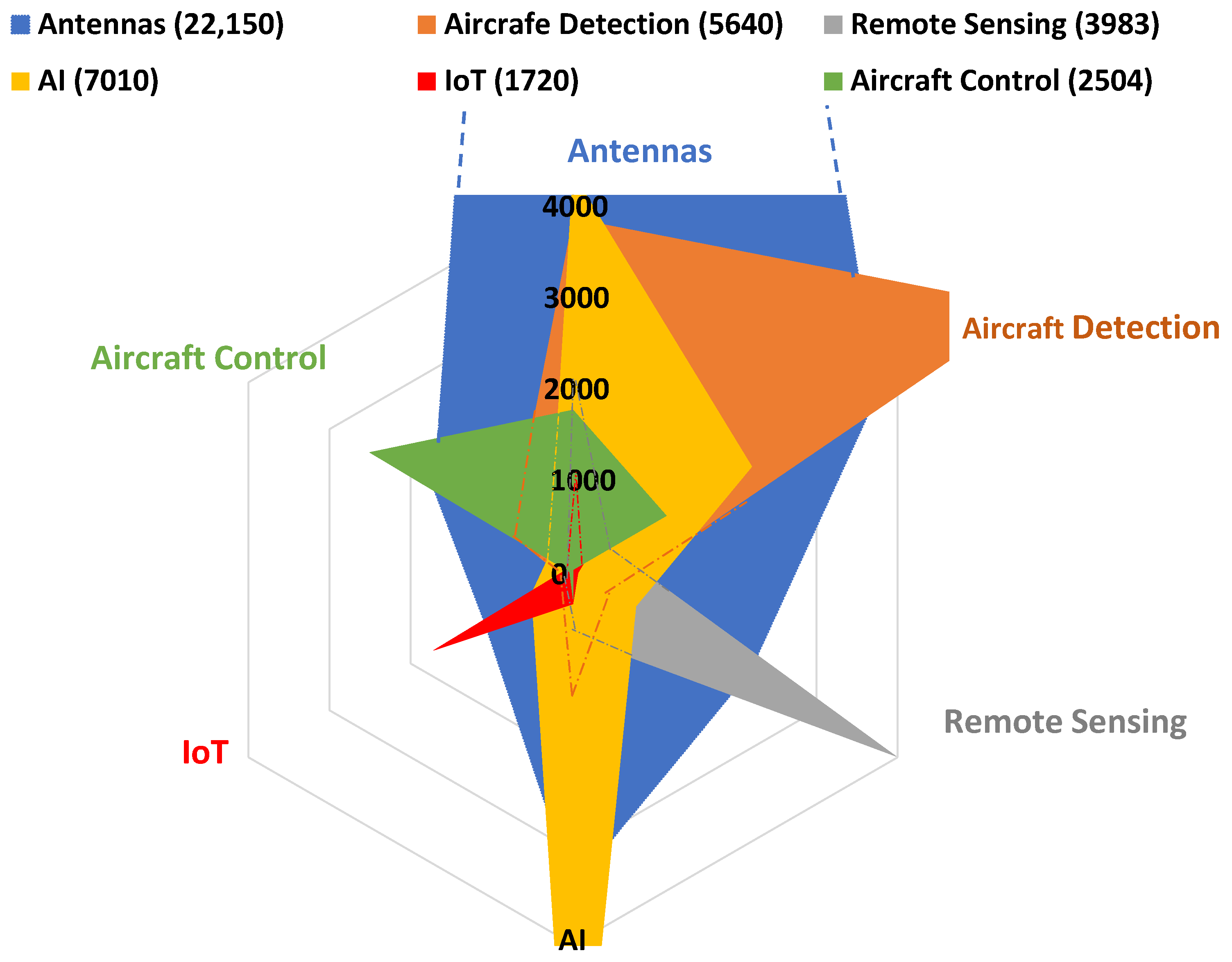
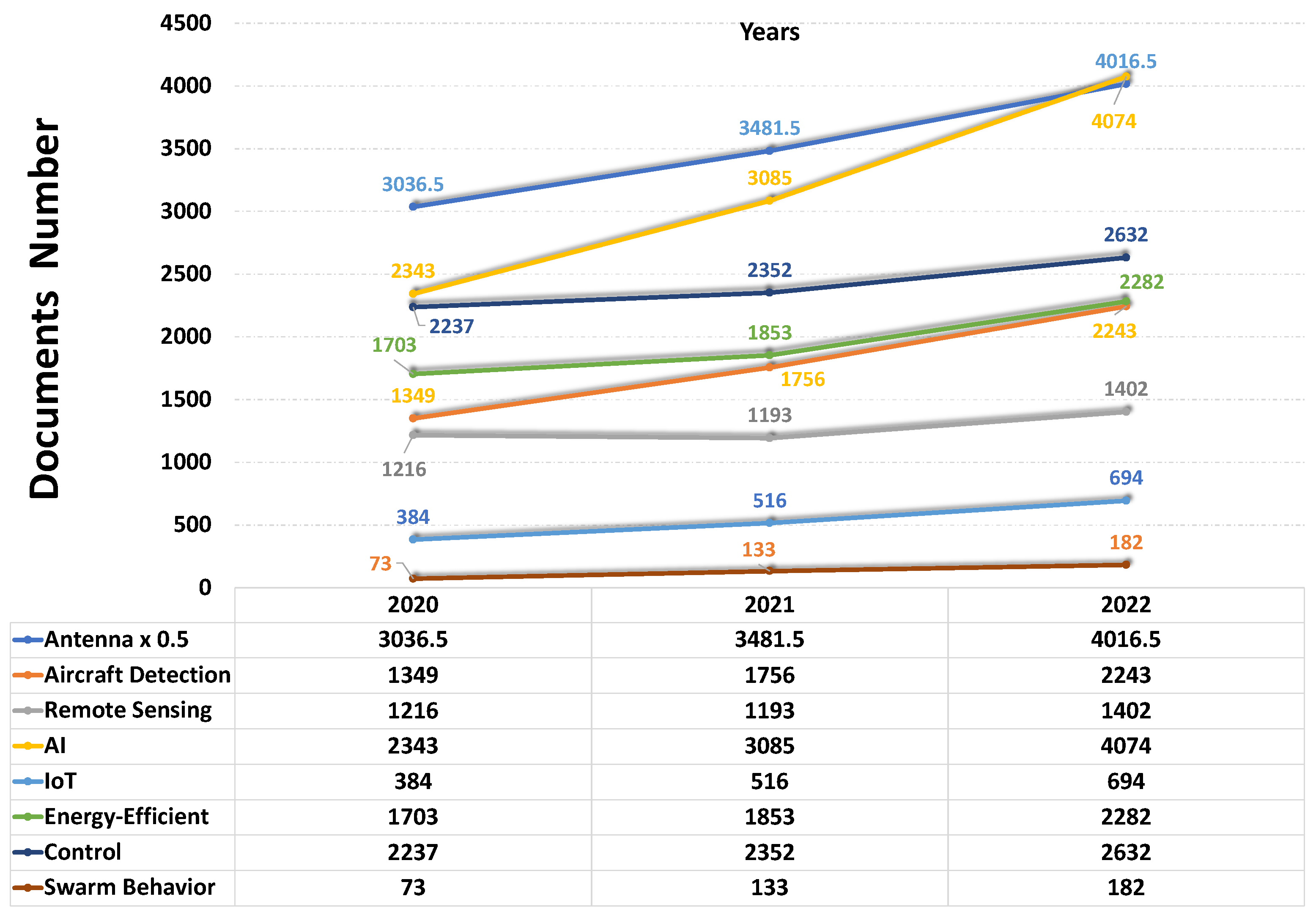
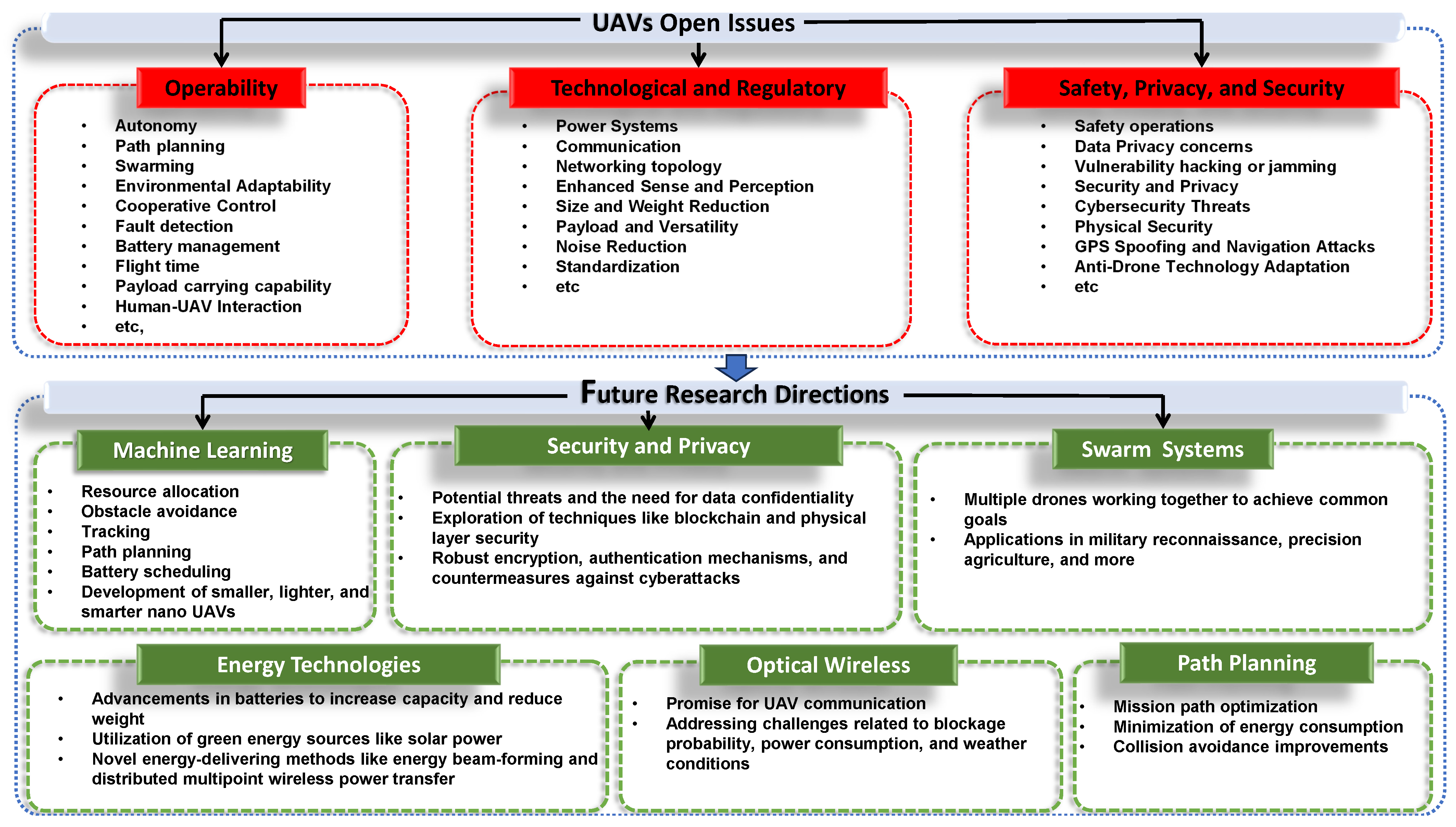

{kind=link}
{kind=link}
{kind=link}
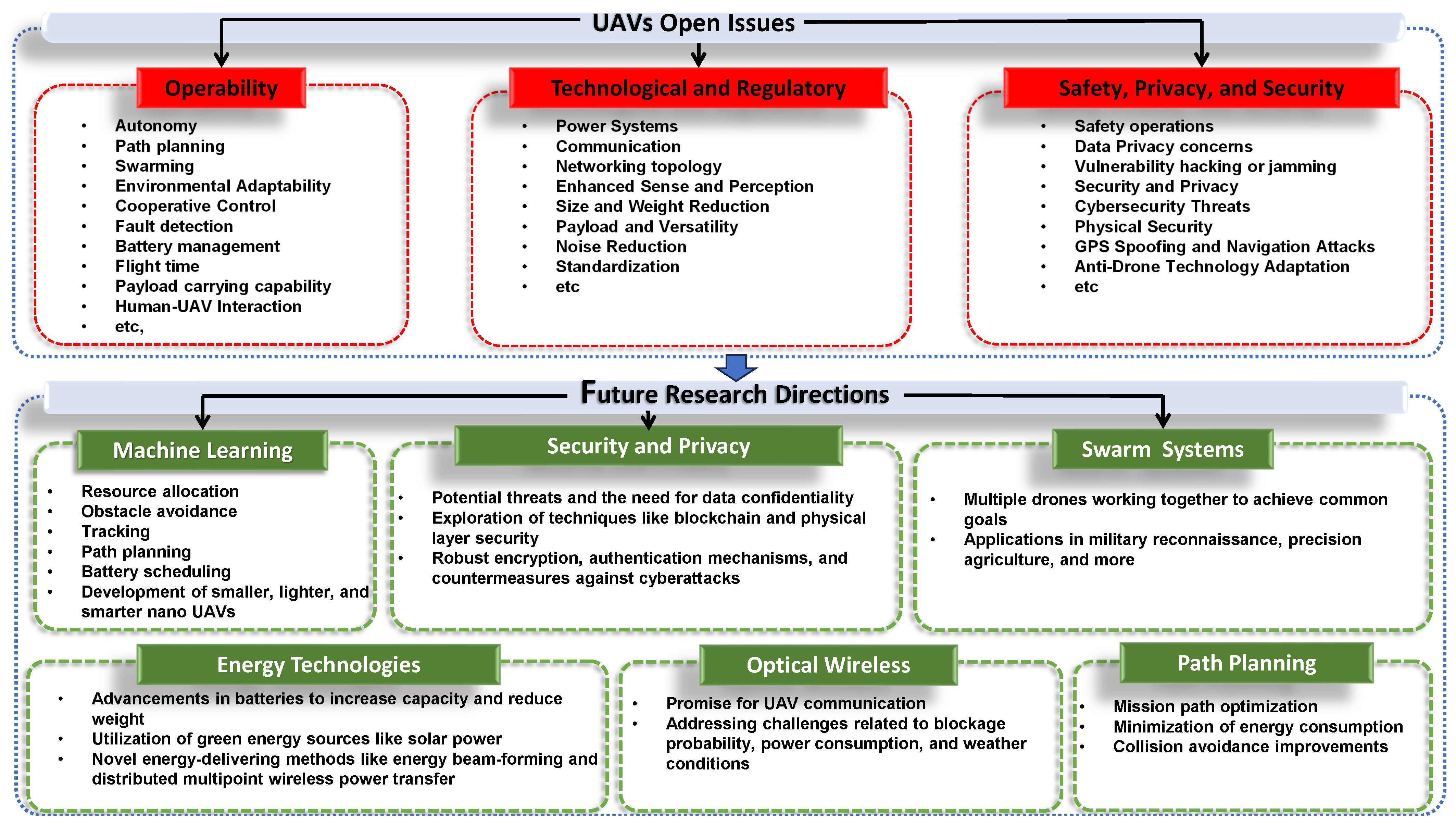{kind=link}
| Research Direction | Antennas | Aircraft Detection | Remote Sensing | AI | IoT | Aircraft Control |
|---|---|---|---|---|---|---|
| Antennas | 22.150 | 3749 | 2176 | 3380 | 1092 | 1707 |
| Aircraft Detection | 3749 | 5604 | 0462 | 1343 | 0133 | 0758 |
| Remote Sensing | 2176 | 0462 | 3983 | 0707 | 0063 | 0 |
| AI | 4231 | 2203 | 0777 | 7010 | 0512 | 0294 |
| IoT | 1092 | 0133 | 0063 | 0365 | 1720 | 0043 |
| Aircraft Control | 1707 | 1152 | 0 | 0311 | 0043 | 2504 |
| Technology | Standard | Data Rate | Range |
|---|---|---|---|
| WiFi [63,64,65,66,67] | 802.11 [13] | Up to 2 Mbps | Up to 100 m |
| LCY < 5 ms|DM:Y| | 802.11 a [64] | Up to 54 Mbps | Up to 120 m |
| UL NT:WLAN | 802.11 b [63] | Up to 11 Mbps | Up to 140 m |
| 802.11 n [65] | Up to 600 Mbps | Up to 250 m | |
| 802.11 g [66] | Up to 54 Mbps | Up to 140 m | |
| 802.11 ac [67] | Up to 866.7 Mbps | Up to 120 m | |
| ZigBee [68,69] | 802.15.4 | Up to 25 kbps | Up to 100 m |
| LCY < 15 ms|DM:Y|UL | |||
| Bluetooth V5 [70] | 802.15.1 | Up to 2 Mbps | Up to 200 m |
| LCY < 3 ms|DM:Y|UL | |||
| LoRaWAN [71] | IEEE | Up to 50 kbps | Up to 15 km |
| DCD|DM:Y|UL | 802.15.4 g | ||
| NT:WPAN | |||
| Sigfox [72] | - | Up to 100 bps | Up to 30 km |
| LCY about 2 s|DM:Y|UL | |||
| NB-IoT [73] | - | Up to 250 kbps | Up to 35 km |
| LCY:1.6 to 10 s|DM:Y|L | |||
| Cellular: | |||
| 3G [74,75,76] | HSPA+ | Up to 21.1 Mbps | Wide area |
| LTE/LTEM | Up to 100 Mbps | ||
| LCY:500 ms NT:LPWAN | |||
| 4G [72] LCY:4ms | HSPA+ | Up to 100 Mbps | Wide area |
| 5G [31,72,77,78] | mMTC | Up to 1 Gbps | Wide area |
| LCY:1 ms |DM:Y|L | URLLC | Up to 1 Gbps | Wide area |
| B5G [79] | eMBB/hybrid | Up to 100 Gbps | Wide area |
| LCY:1 ms |DM:Y|L | URLLC | Up to 100 Gbps | Wide area |
| 6G [79,80] | MBRLLC | Up to 1 Tbps | Wide area |
| LCY< 1 ms|DM:Y|L | mURLLC | Up to 1 Tbps | Wide area |
| HCS / MPS | Up to 1 Tbps | Wide area |
| Research Direction | Rate of Growth/Year (Number of Documents/Year) | Acceleration of Growth |
|---|---|---|
| Antenna | 980 | 1.20 |
| Aircraft detection | 447 | 1.19 |
| Remote sensing | 93 | 9.08 |
| AI | 865 | 1.33 |
| IoT | 155 | 1.34 |
| Energy efficiency | 289 | 2.86 |
| Control | 197 | 2.43 |
| Swarm | 54 | 0.81 |
| Control Technique | Advantage | Disadvantage |
|---|---|---|
| PID [27,94,203,211,217,218,257,258,259,260] | (1) Implementation is simple. (2) The reduction in steady state error can be achieved by increasing parameter gains. (3) It consumes minimal memory. (4) The design is user-friendly and it responds well. | (1) Conducting experiments can be a time-consuming process. (2) In certain cases, aggressive gain and overshooting may occur. (3) There is a possibility of overshoot occurrences when adjusting the parameters. |
| SMC [27,94,203,211,223,257,258,261,262] | (1) It exhibits high insensitivity to variations in parameters and disturbances. (2) It is capable of delivering significant implementation efforts. (3) Linearization of dynamics is not necessary for its operation. (4) It is efficient in terms of time. (5) Filtering techniques can be employed to reduce chattering effects. | (1) Severe chattering effects occur during switching. (2) The process of designing such a controller is intricate. (3) The sliding control scheme heavily depends on the sliding surface, and an incorrect design can result in unsatisfactory performance. |
| LQR [27,94,203,211,257,258,263,264] | (1) Achieves robust stability while minimizing energy consumption. (2) Demonstrates computational efficiency. (3) The effectiveness of the system is enhanced by incorporating the Kalman filter. | (1) Complete access to the system states is necessary, but this is not always feasible. (2) There is no assurance regarding the speed of response. (3) It is not suitable for systems that demand a consistently minimal steady-state error. |
| Gain Scheduling [27,94,203,211,257,258,265,266] | (1) Facilitates the rapid response of the controller to dynamic changes in operating conditions. (2) The design approach seamlessly integrates with the overall problem, even when dealing with challenging nonlinear problems. | (1) It is not time-efficient. (2) Gain scheduling heavily relies on conducting extensive simulations. (3) There are no guaranteed performance outcomes. |
| Backstepping [27,94,203,211,257,258,267,268] | (1) Demonstrates robustness in the face of constant external disturbances. (2) Handles all states within the system and is capable of dealing with nonlinear systems. | (1) It is not efficient in terms of time. (2) It is sensitive to variations in parameters. (3) Implementation can be challenging. |
| H-Infinity [27,94,203,211,257,258,264,268,269] | (1) Capable of operating in the presence of uncertainties within a system. (2) Complex control problems are addressed in two subsections: stability and performance. (3) Offers robust performance. | (1) Involves intricate mathematical algorithms. (2) Implementation can be challenging. (3) It necessitates a reasonably accurate model of the system to be controlled. |
| Adaptive control [27,94,203,208,209,211,216,221,222,257,258,270] | (1) Capable of handling systems with unpredictable parameter variations and disturbances. (2) Capable of handling unmodeled dynamics. (3) Exhibits rapid responsiveness to varying parameters. | (1) An accurate model of the system is necessary. (2) Implementing the design can be time-consuming. (3) It requires extensive design work before final implementations. |
| AI: Fuzzy Logic and Neural Network [27,94,203,211,213,217,257,258,271,272,273] | (1) The control action is heavily influenced by the provided rules. (2) The controller can be manually prepared. (3) Capable of withstanding unknown disturbances. (4) Offers adaptive parameters for uncertain models. (5) The selected control system can be trained. | (1) Stability cannot be guaranteed. (2) Continuous tuning is necessary for critical systems. (3) It consumes a significant amount of computational power. (4) Offline learning may fail when uncertainties are present. |
| Simulation Software | Pros | Cons |
|---|---|---|
| UAV Toolbox MATLAB [372,373,374,375] PL: SOS: L: |
|
|
| GazeBoSim [367,376,377] PL: SOS: L: |
|
|
| AirSim [156,340,341,342,343] PL: SOS: L: |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs). Systems 2023, 11, 400. https://doi.org/10.3390/systems11080400
Telli K, Kraa O, Himeur Y, Ouamane A, Boumehraz M, Atalla S, Mansoor W. A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs). Systems. 2023; 11(8):400. https://doi.org/10.3390/systems11080400
Chicago/Turabian StyleTelli, Khaled, Okba Kraa, Yassine Himeur, Abdelmalik Ouamane, Mohamed Boumehraz, Shadi Atalla, and Wathiq Mansoor. 2023. "A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs)" Systems 11, no. 8: 400. https://doi.org/10.3390/systems11080400
APA StyleTelli, K., Kraa, O., Himeur, Y., Ouamane, A., Boumehraz, M., Atalla, S., & Mansoor, W. (2023). A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs). Systems, 11(8), 400. https://doi.org/10.3390/systems11080400