A Hybrid Maximum Power Point Tracking Method for Photovoltaic Systems for Dynamic Weather Conditions

Abstract
:1. Introduction
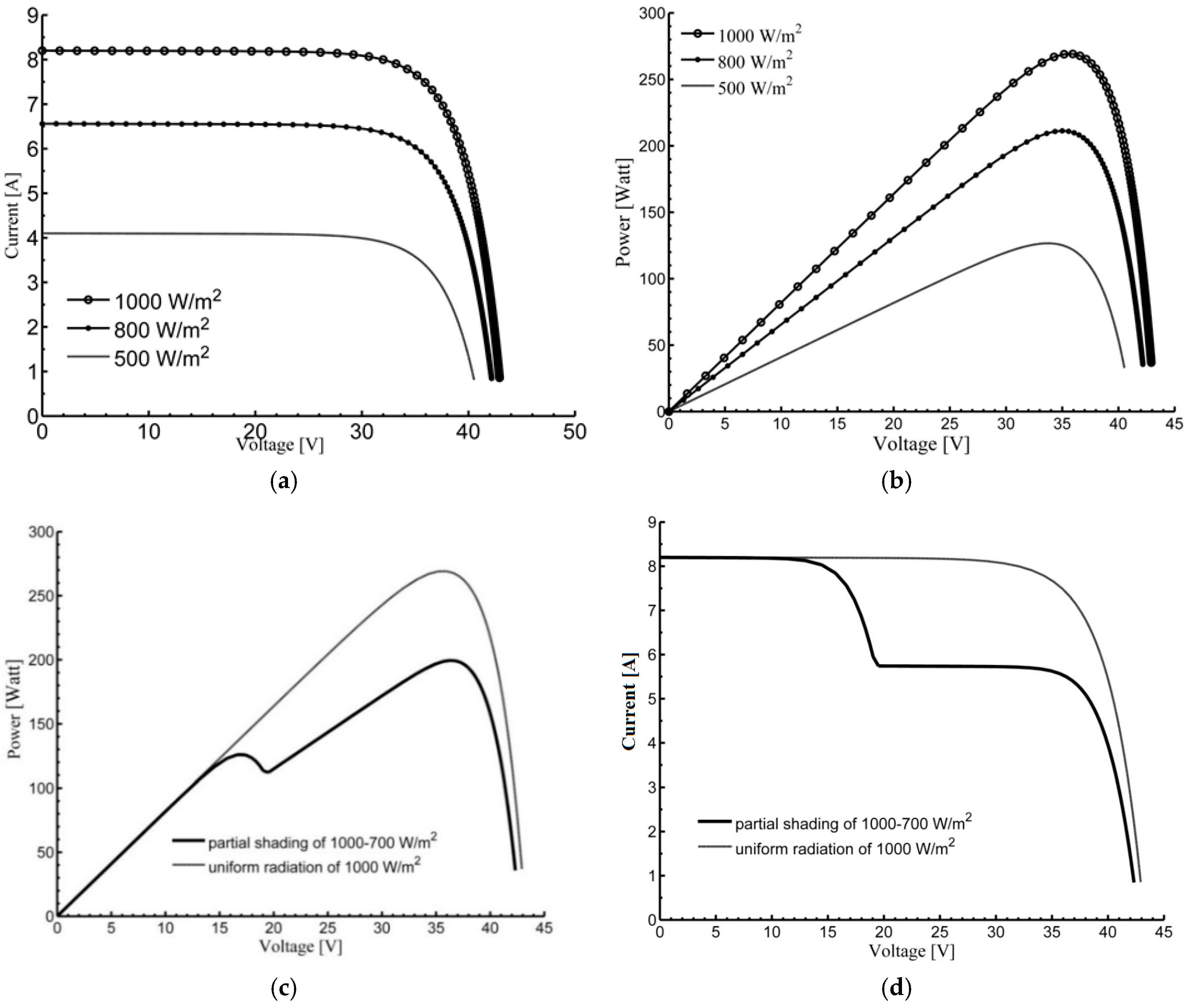
2. PV Modeling and Characteristics
3. MPPT Algorithms
3.1. P&O Algorithm
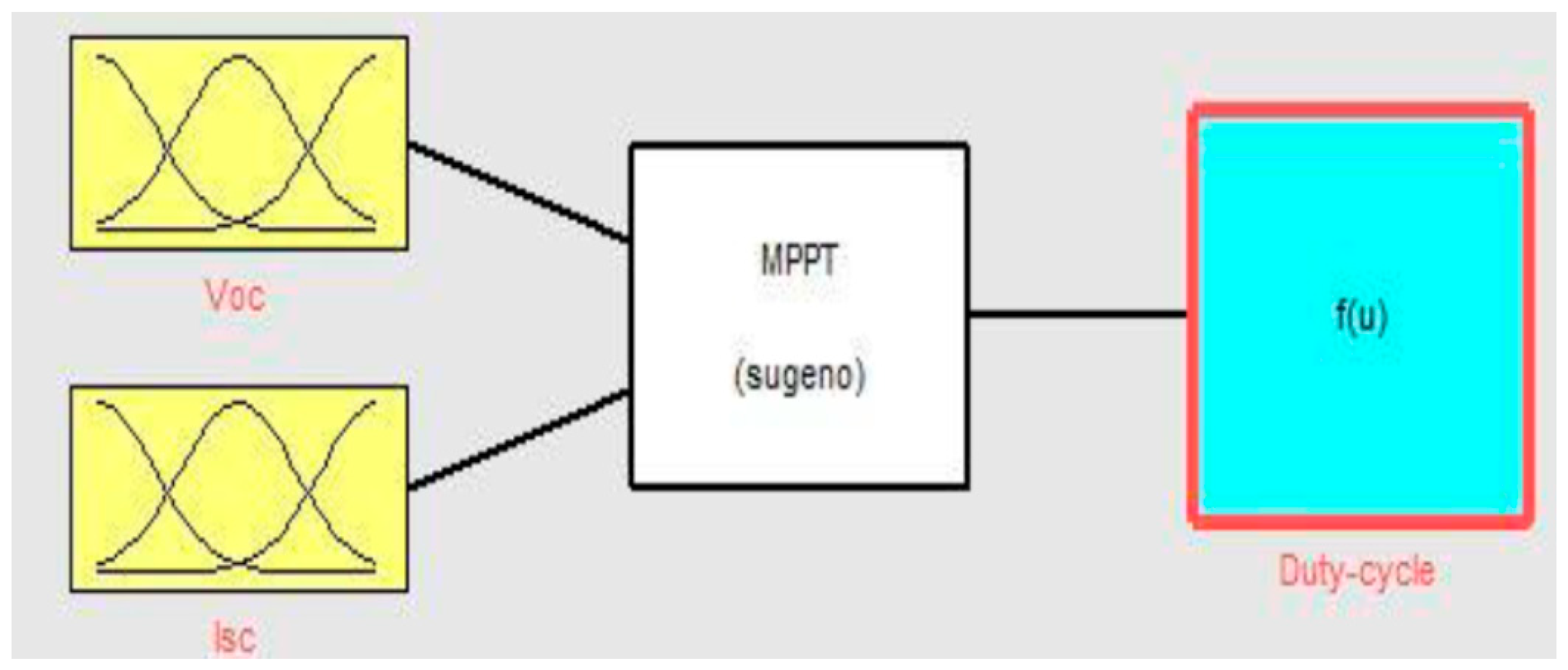
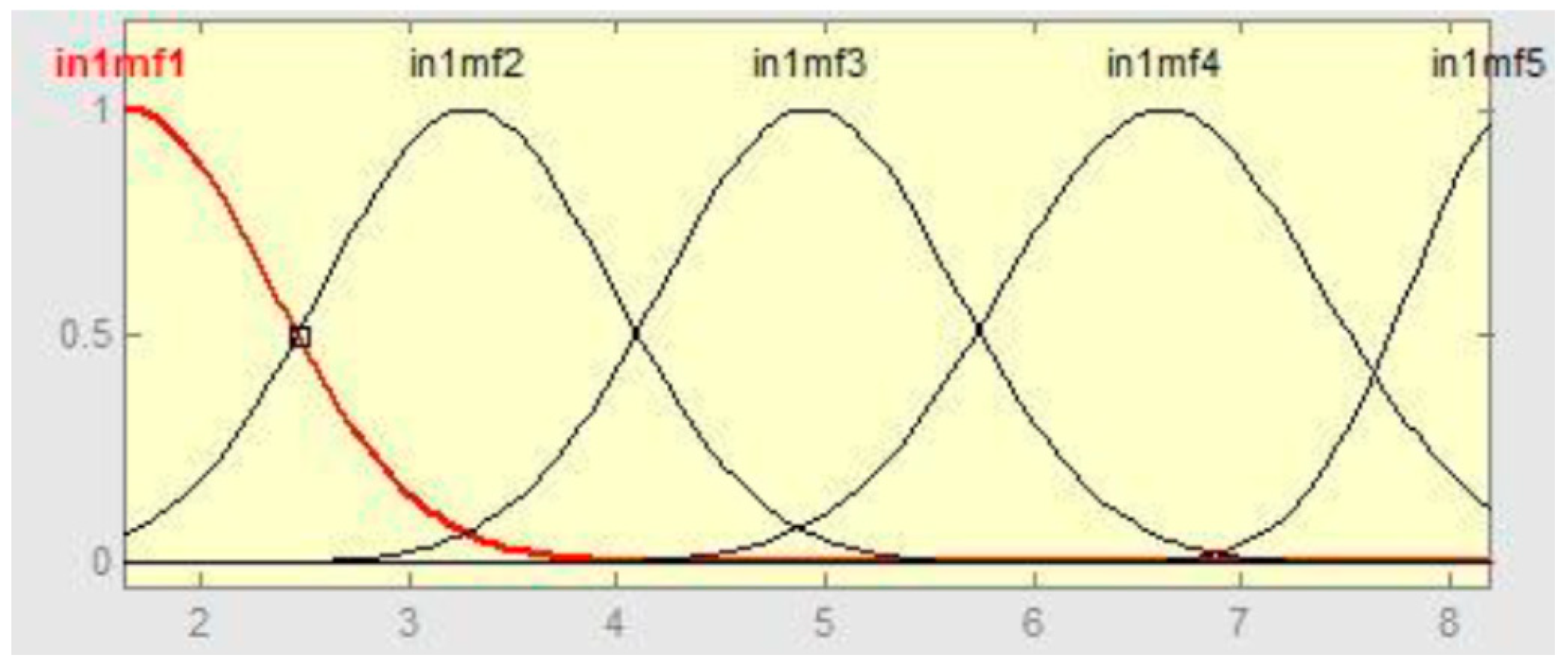
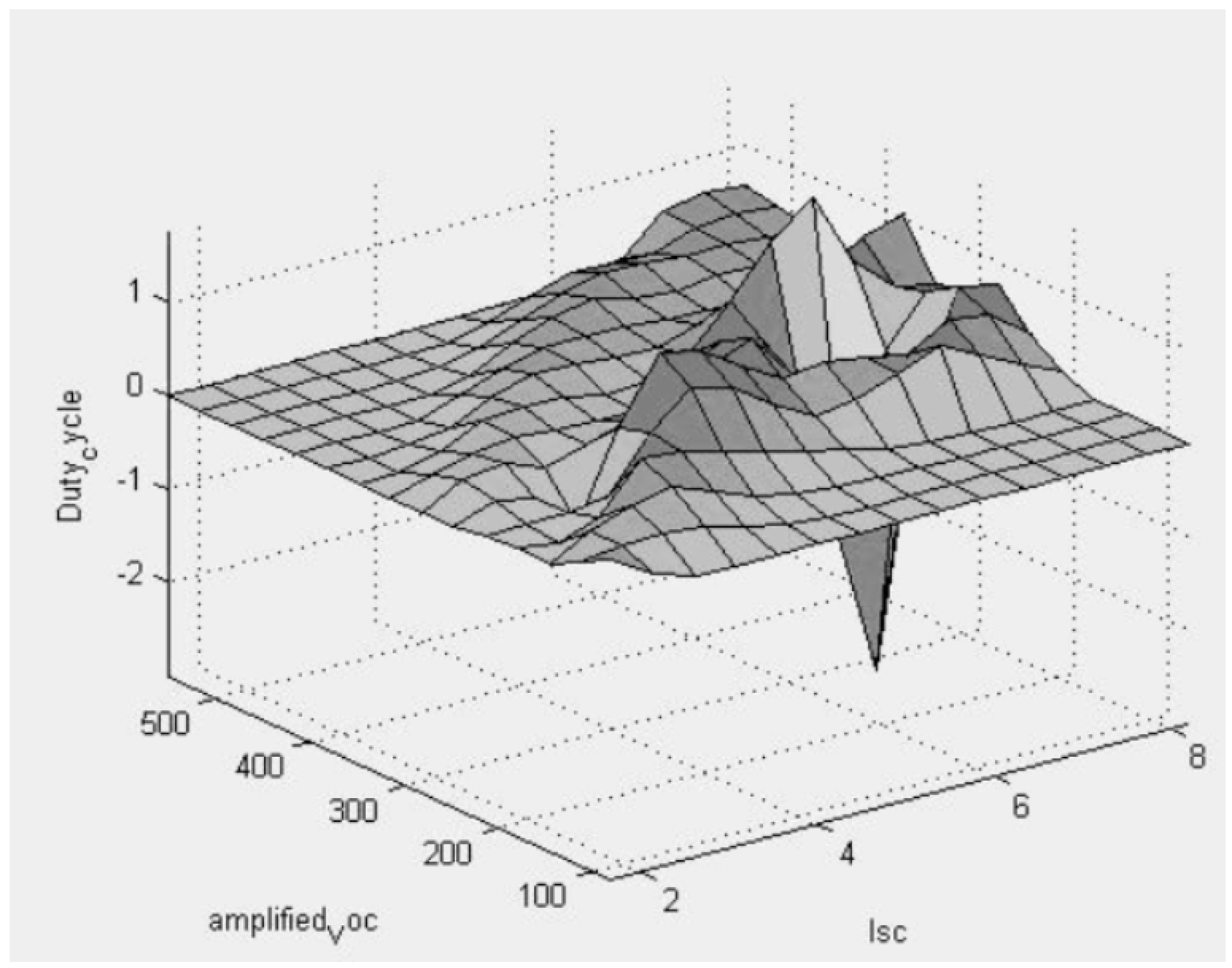
3.2. Fuzzy Logic Controller (FLC)
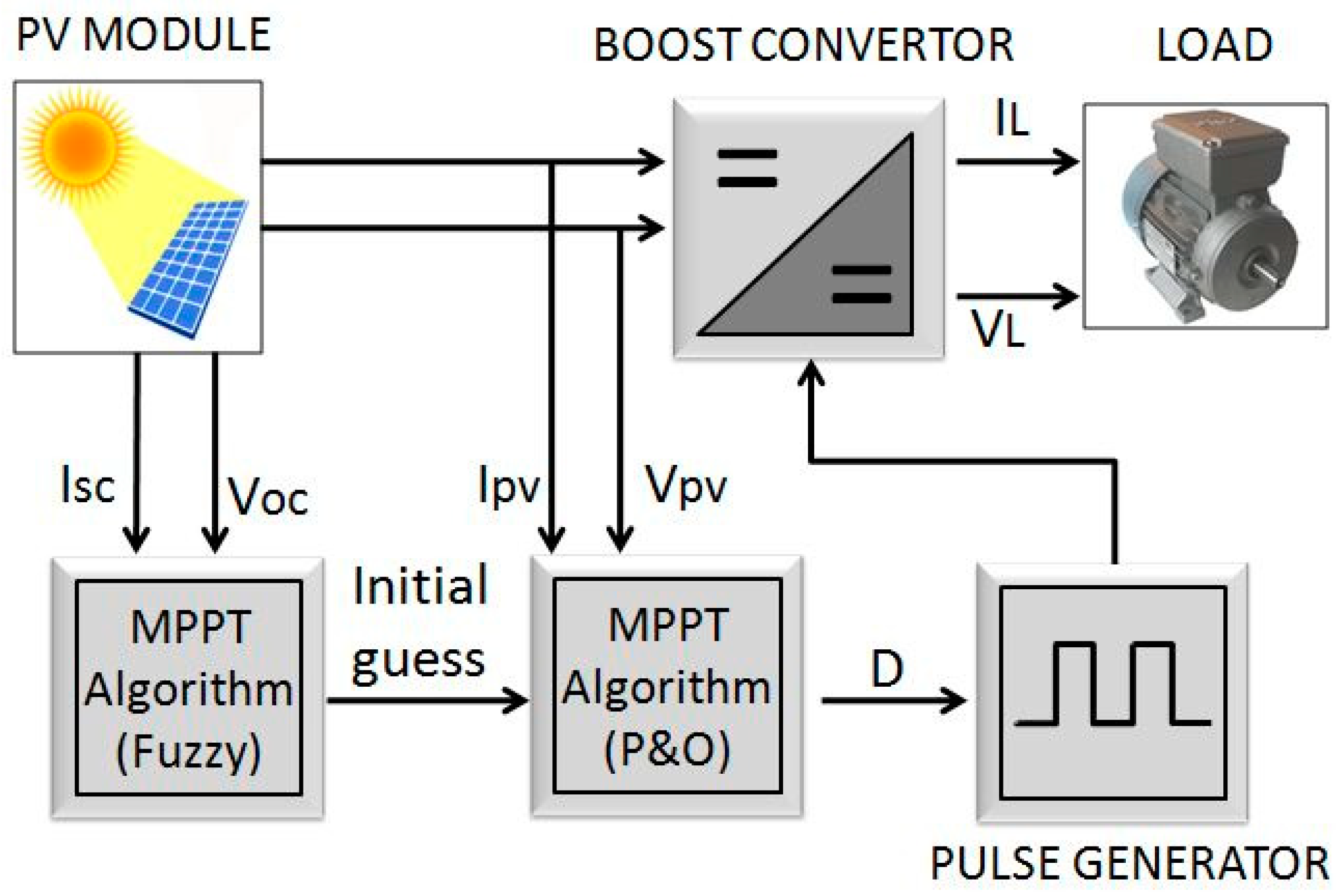
3.3. Proposed Hybrid MPPT Algorithm
4. Results and Discussion
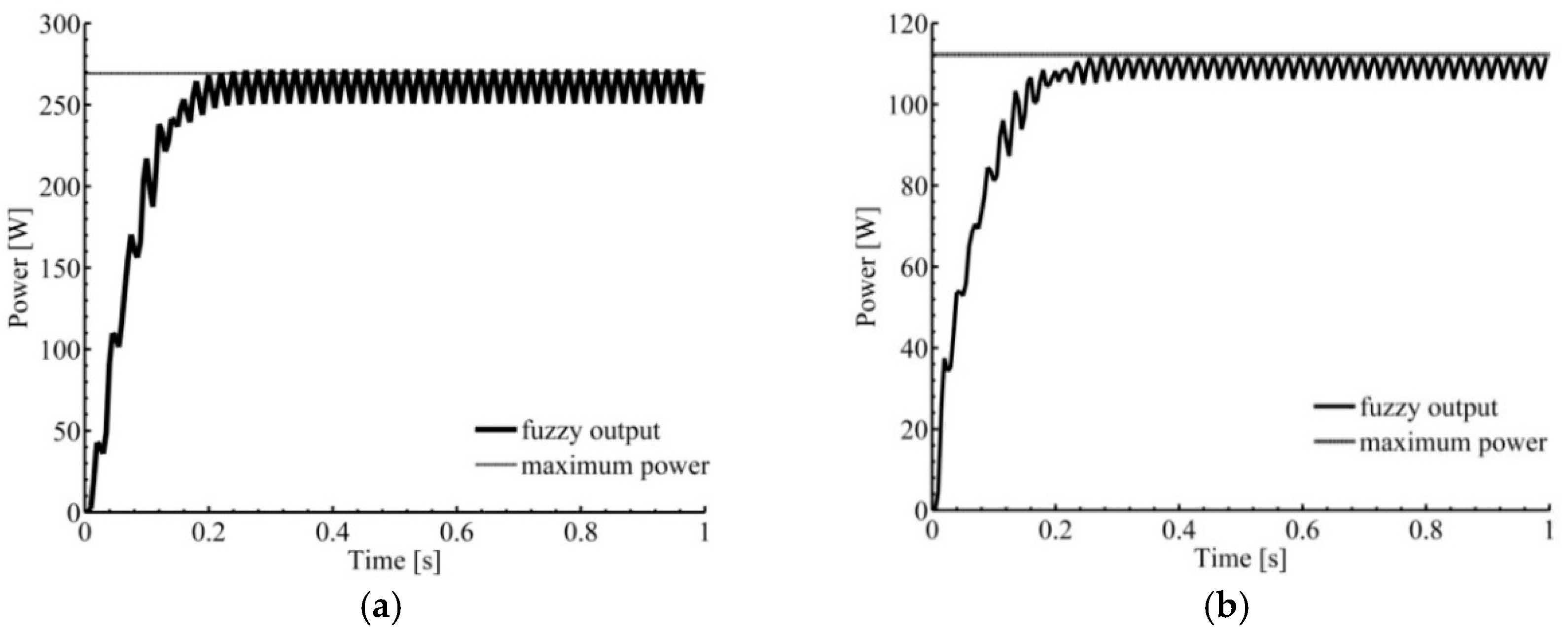
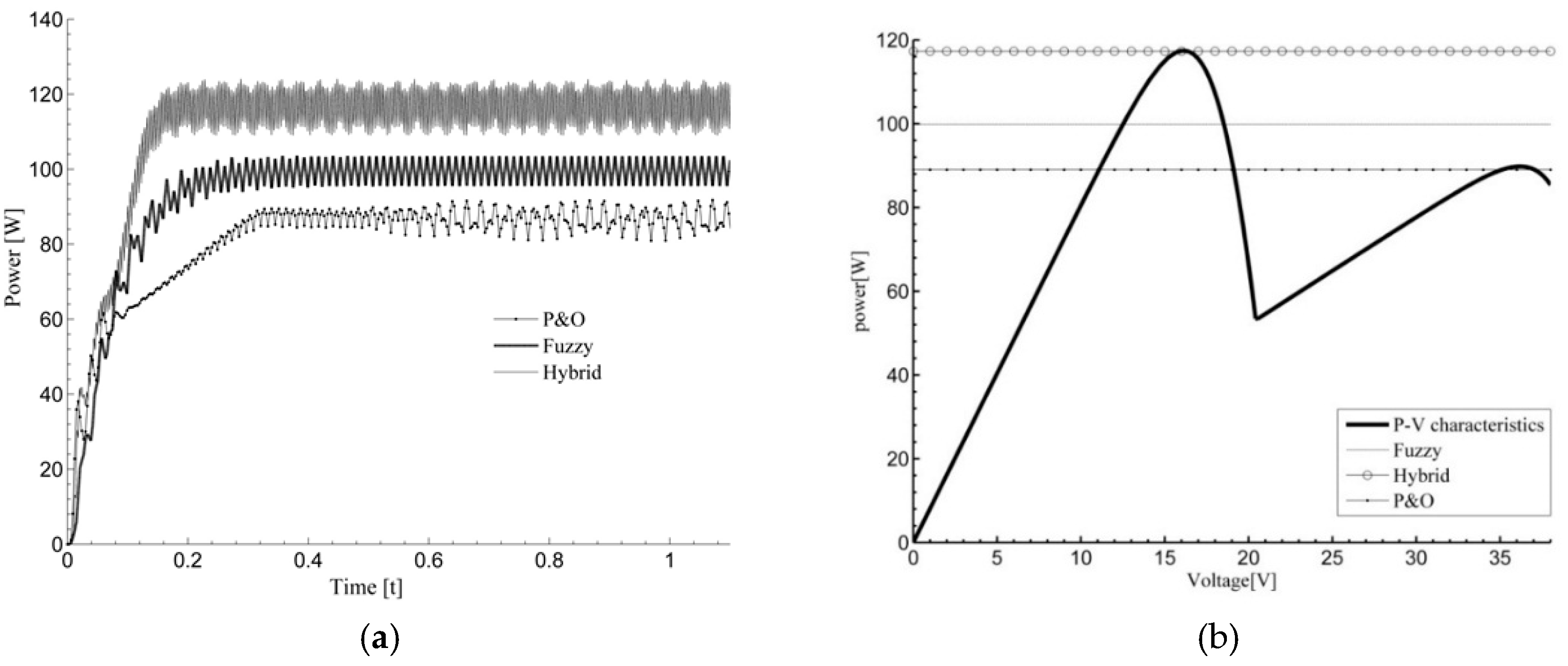
4.1. Performance of FLC Alone
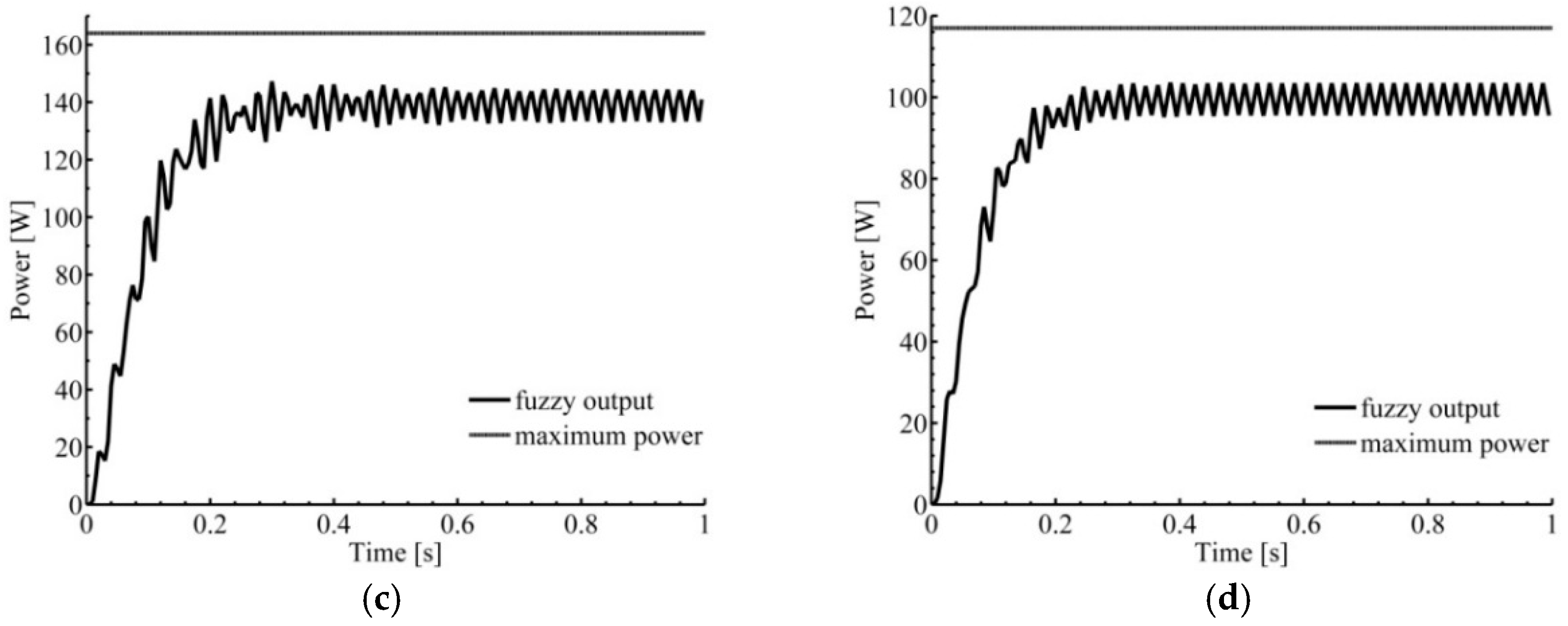
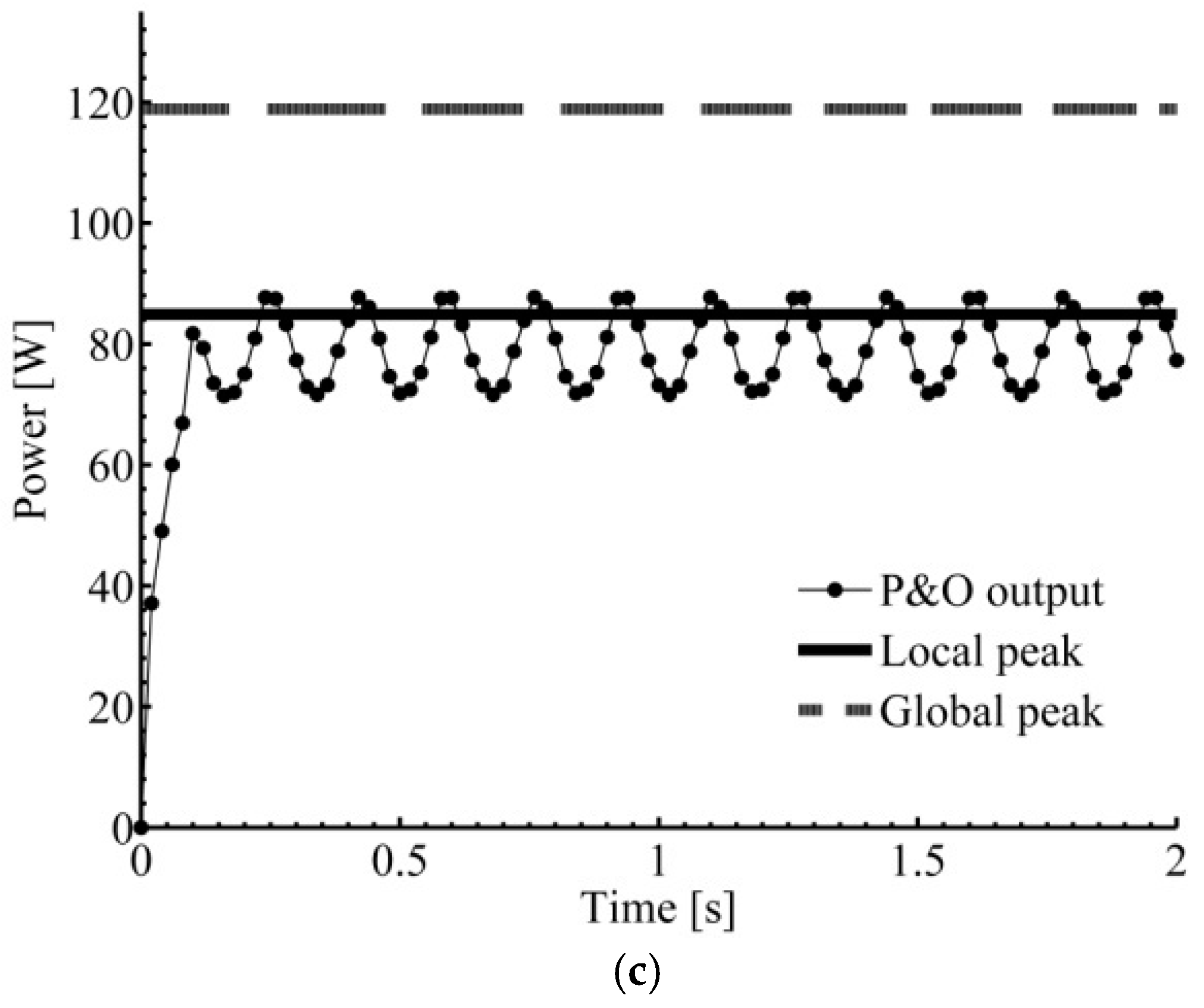
4.2. Performance of P&O Alone
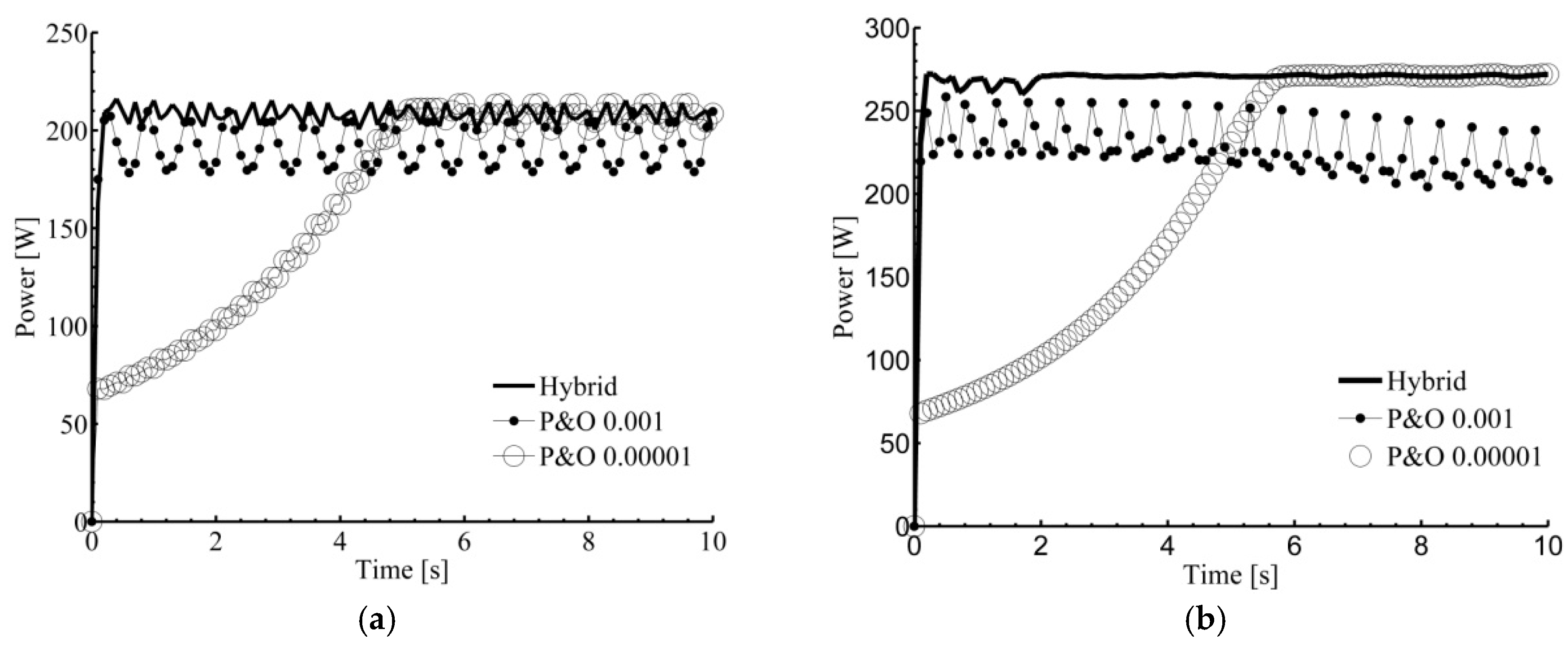
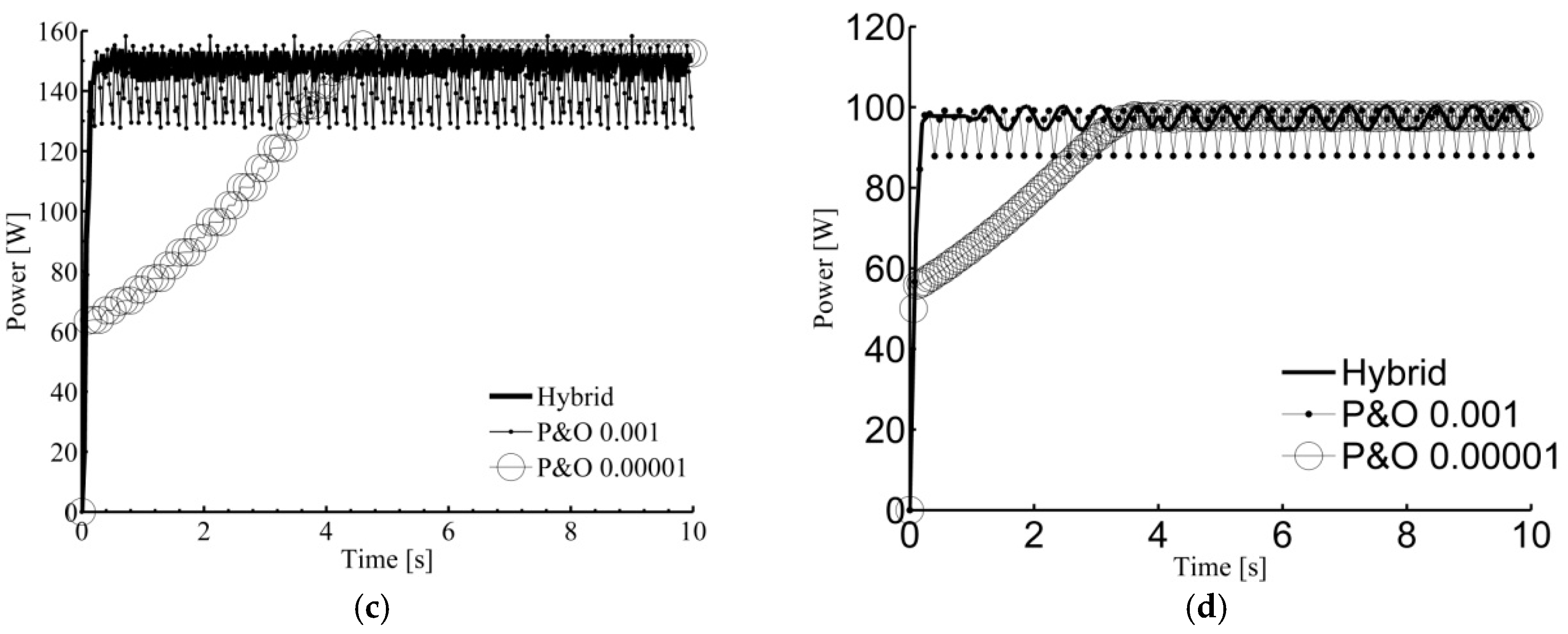
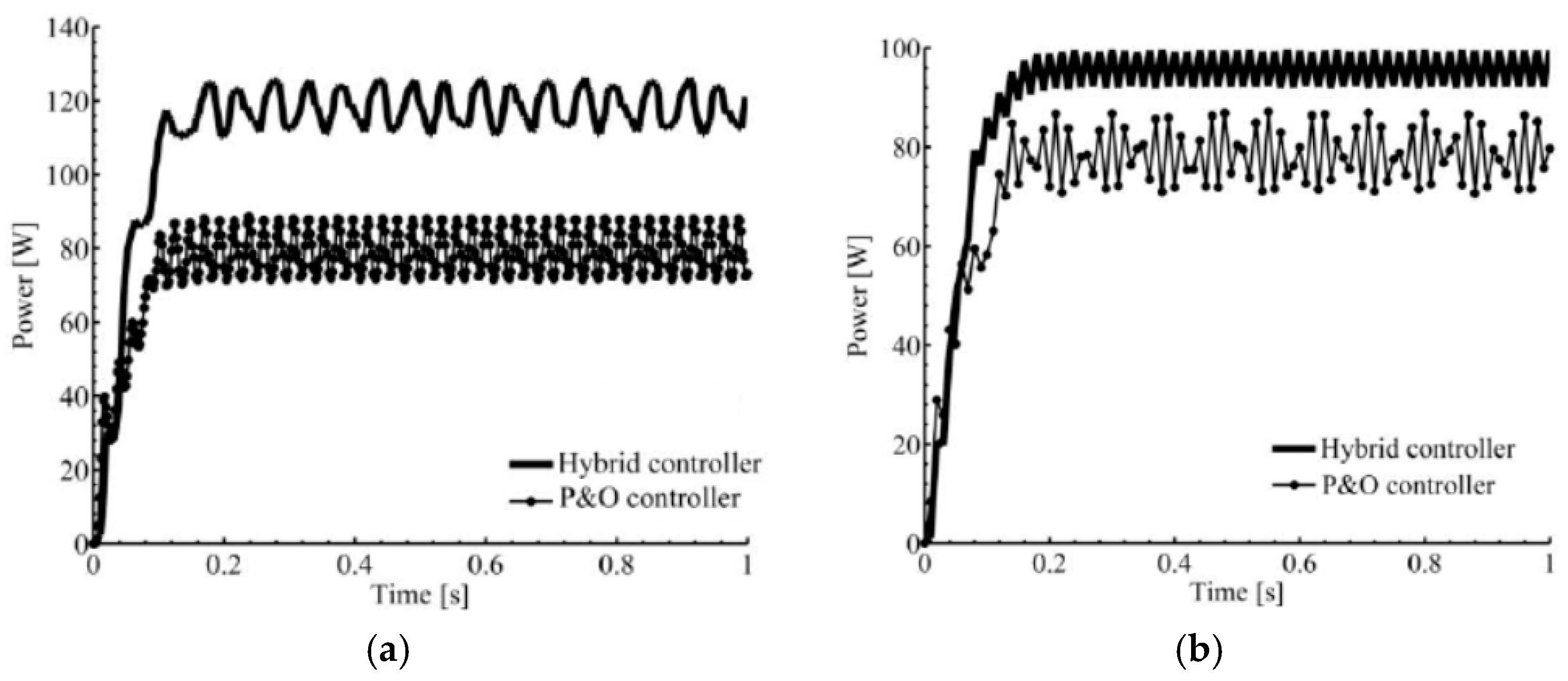
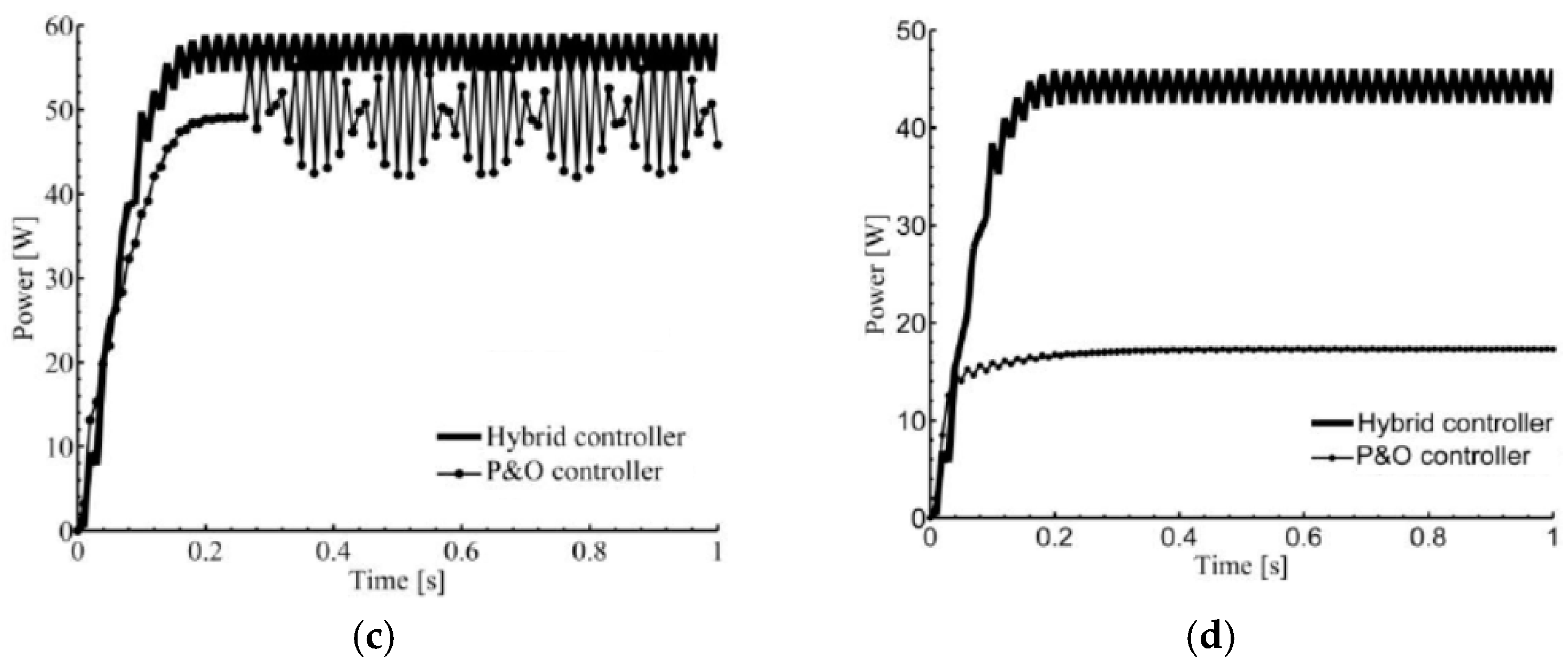
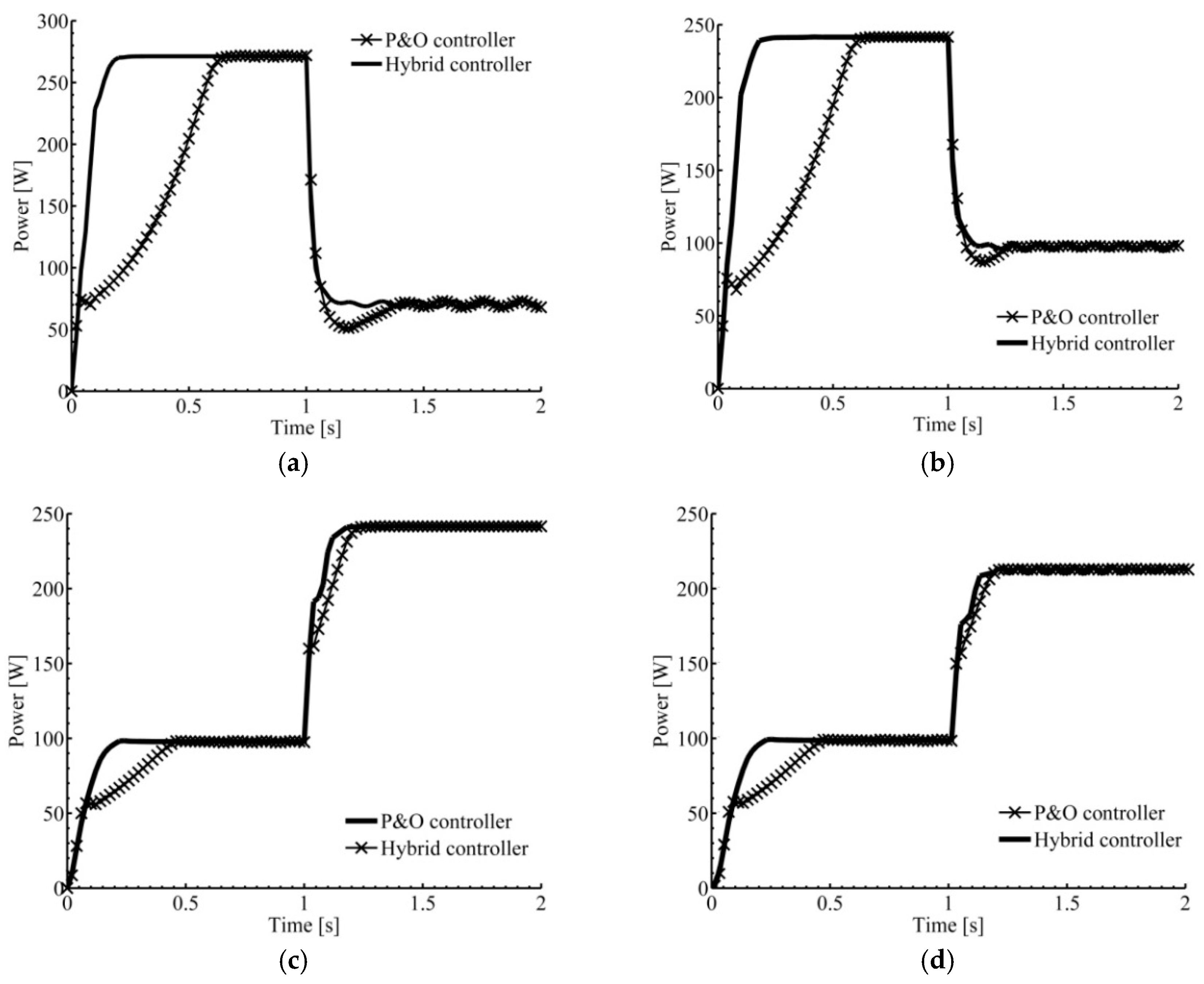
4.3. Performance of the Hybrid Proposed Algorithm
4.4. Testing the Performance at Random Weather Conditions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bataineh, K.M. Optimisation analysis of solar powered organic Rankine cycle system. IET Renew. Power Gen. 2016, 11, 342–350. [Google Scholar] [CrossRef]
- Allataifeh, A.; Bataineh, K.; Al-Khedher, M. Maximum Power Point Tracking Using Fuzzy Logic Controller Under Partial Conditions. Smart Grid Renew. Energy 2015, 6, 1–13. [Google Scholar] [CrossRef]
- Parida, B.; Iniyan, S.; Goic, R. A review of solar photovoltaic technologies. Renew. Sustain. Energy Rev. 2011, 15, 1625–1636. [Google Scholar] [CrossRef]
- Salas, V.; Olías, E.; Barrado, A.; Lázaro, A. Review of the maximum power point tracking algorithms for stand-alone photovoltaic systems. Sol. Energy Mater. Sol. Cells 2006, 90, 1555–1578. [Google Scholar] [CrossRef]
- Abdelsalam, A.K.; Massoud, A.M.; Ahmed, S.; Enjeti, P. High-performance adaptive perturb and observe MPPT technique for photovoltaic-based microgrids. IEEE Trans. Power Electron. 2011, 26, 1010–1021. [Google Scholar] [CrossRef]
- Patel, H.; Agarwal, V. Investigations into the performance of photovoltaics-based active filter configurations and their control schemes under uniform and non-uniform radiation conditions. IET Renew. Power Gen. 2010, 4, 12–22. [Google Scholar] [CrossRef]
- Salem, F.; Moteleb, M.S.A.; Dorrah, H.T. An enhanced fuzzy-PI controller applied to the MPPT problem. J. Sci. Eng. 2005, 8, 147–153. [Google Scholar]
- Tafticht, T.; Agbossou, K.; Doumbia, M.L.; Cheriti, A. An improved maximum power poin FLC algorithm t tracking method for photovoltaic systems. Renew. Energy 2008, 33, 1508–1516. [Google Scholar] [CrossRef]
- Ramprava, R.; Mathur, B.L. Intelligent controller based maximum power point tracking for solar PV system. Int. J. Comput. Appl. 2011, 12, 37–41. [Google Scholar]
- Chowdhury, S.; Saha, H. Maximum power point tracking of partially shaded solar photovoltaic arrays. Sol. Energy Mater Sol. Cells 2010, 94, 1441–1447. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Low, K. A Global Maximum Power Point Tracking Scheme Employing DIRECT Search Algorithm for Photovoltaic Systems. IEEE Trans. Ind. Electron. 2010, 57, 3456–3467. [Google Scholar] [CrossRef]
- Cui, Y.; Yao, W.; Luo, J. A Research and Improvement on a Maximum Power Point Tracking Method for PV System under Partially Shaded Conditions. Procedia Eng. 2012, 29, 2583–2589. [Google Scholar] [CrossRef]
- Lin, C.H.; Huang, C.; Du, Y.; Chen, J. Maximum photovoltaic power tracking for the PV array using the fractional-order incremental conductance method. Appl. Energy 2011, 88, 4840–4847. [Google Scholar] [CrossRef]
- Ahmed, R.; Namaane, A.; M’Sirdi, N.K. Improvement in Perturb and Observe Method Using State Flow Approach. Energy Procedia 2013, 42, 614–623. [Google Scholar] [CrossRef]
- Taheri, H.; Salam, Z.; Ishaque, K. A Novel Maximum Power Point Tracking Control of Photovoltaic System Under Partial and Rapidly Fluctuating Shadow Conditions Using Differential Evolution. In Proceedings of the IEEE Symposium on Industrial Electronics and Applications, Penang, Malaysia, 3–5 October 2010; pp. 82–87. [Google Scholar]
- Jiang, L.; Maskell, D.L.; Patra, J.C. A novel ant colony optimization-based maximum power point tracking for photovoltaic systems under partially shaded conditions. Energy Build. 2013, 58, 227–236. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, C.; Huang, J.; Chen, J. Neural-network-based maximum power point tracking methods for photovoltaic systems operating under fast changing environments. Sol. Energy 2013, 89, 42–53. [Google Scholar] [CrossRef]
- Punitha, K.; Devaraj, D.; Sakthivel, S. Artificial neural network based modified incremental conductance algorithm for maximum power point tracking in photovoltaic system under partial shading conditions. Energy 2013, 62, 330–340. [Google Scholar] [CrossRef]
- Younis, M.A.; Khatib, T.; Najeeb, M.; Ariffin, A.M. An Improved Maximum Power Point Tracking Controller for PV Systems Using Artificial Neural Network. Przegląd Elektrotechniczny (Electr. Rev.) 2012, 88, 116–121. [Google Scholar]
- Subiyanto, S.; Mohamed, A.; Hannan, M.A. Intelligent maximum power point tracking for PV system using Hopfield neural network optimized fuzzy logic controller. Energy Build. 2012, 51, 29–38. [Google Scholar] [CrossRef]
- Alajmi, B.N.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. A Maximum Power Point Tracking Technique for Partially Shaded Photovoltaic Systems in Microgrids. IEEE Trans. Ind. Electron. 2013, 60, 1596–1606. [Google Scholar] [CrossRef]
- Singh, S.; Mathew, L.; Shimi, S.L. Design and Simulation of Intelligent Control MPPT Technique for PV Module Using MATLAB/SIMSCAPE. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2013, 2, 4554–4566. [Google Scholar]
- Rezaei, A.; Gholamian, S. Optimization of New Fuzzy Logic Controller by Genetic Algorithm for Maximum Power Point Tracking in Photovoltaic System. ISESCO J. Sci. Technol. 2013, 9, 9–16. [Google Scholar]
- Kharb, R.K.; Ansari, M.F.; Shimi, S.L. Design and Implementation of ANFIS based MPPT Scheme with Open Loop Boost Converter for Solar PV Module. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 3, 6517–6524. [Google Scholar]
- Zaki, A.M.; Amer, S.I.; Mostafa, M. Maximum Power Point Tracking for PV System Using Advanced Neural Networks Technique. Int. J. Emerg. Technol. Adv. Eng. 2012, 2, 58–63. [Google Scholar]
- Messalti, S.; Harrag, A.; Loukriz, A. A new neural networks MPPT controller for PV systems. In Proceedings of the 2015 6th International Renewable Energy Congress (IREC), Sousse, Tunisia, 24–26 March 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Radjai, T.; Gaubert, J.P.; Rahmani, L.; Mekhilef, S. Experimental verification of po mppt algorithm with direct control based on fuzzy logic control using CUK converter. Int. Trans. Electr. Energy Syst. 2015, 25, 492–508. [Google Scholar] [CrossRef]
- Radjai, T.; Rahmani, L.; Mekhilef, S.; Gaubert, J.P. Implementation of a modified incremental conductance {MPPT} algorithm with direct control based on a fuzzy duty cycle change estimator using dspace. Sol. Energy 2014, 110, 325–337. [Google Scholar] [CrossRef]
- D’Souza, N.S.; Lopes, A.C.; Liu, X. Comparative study of variable size perturbation and observation maximum power point trackers for PV systems. Electr. Power Syst. Res. 2010, 80, 296–305. [Google Scholar] [CrossRef]
- Salah, B.; Ouali, B. Comparison of fuzzy logic and neural network in maximum power point tracker for PV systems. Electr. Power Syst. Res. 2011, 81, 43–50. [Google Scholar] [CrossRef]
- Algarín, C.R.; Giraldo, J.T.; Álvarez, O.R. Fuzzy Logic Based MPPT Controller for a PV System. Energies 2017, 10, 2036. [Google Scholar] [CrossRef]
- Lee, C.; Ko, J.; Seo, T.; Chung, D. MPPT control of photovoltaic system using FLC-PI controller. In Proceedings of the 13th International Conference on Control, Automation and Systems (ICCAS 2013), Gwangju, Korea, 20–23 October 2013. [Google Scholar]
- Cheng, P.C.; Peng, B.R.; Liu, Y.H.; Cheng, Y.S.; Huang, J.W. Optimization of a Fuzzy-Logic-Control-Based MPPT Algorithm Using the Particle Swarm Optimization Technique. Energies 2015, 8, 5338–5360. [Google Scholar] [CrossRef] [Green Version]
- Abu-Rub, H.; Iqbal, A.; Ahmed, S.M.; Peng, F.Z.; Li, Y.; Ge, B. Quasi-Z-source inverter-based photovoltaic generation system with maximum power tracking control using ANFIS. IEEE Trans. Sustain. Energy 2013, 4, 11–20. [Google Scholar] [CrossRef]
- Karlis, A.D.; Kottas, T.L.; Boutalis, Y.S. A novel maximum power point tracking method for PV systems using fuzzy cognitive networks (FCN). Electr. Power Syst. Res. 2007, 77, 315–327. [Google Scholar] [CrossRef]
- Chiu, C.S. fuzzy maximum power point tracking control of solar power generation systems. IEEE Trans. Energy Convers. 2010, 25, 1123–1132. [Google Scholar] [CrossRef]
- Algarín, C.; Hernández, D.; Leal, D. A Low-Cost Maximum Power Point Tracking System Based on Neural Network Inverse Model Controller. Electronics 2018, 7, 4. [Google Scholar] [CrossRef]
- Wang, Y.; Ding, L.; Li, N. The application of fuzzy parameters self-tuning PID controller in MPPT of photovoltaic power system. In Proceedings of the Transportation, Mechanical, and Electrical Engineering (TMEE), Changchun, China, 16–18 December 2011; pp. 1129–1132. [Google Scholar]
- Dounis, A.I.; Kofinas, P.; Alafodimos, C.; Tseles, D. Adaptive fuzzy gain scheduling PID controller for maximum power point tracking of photovoltaic system. Renew. Energy 2013, 60, 202–214. [Google Scholar] [CrossRef]
- Jiang, L.L.; Nayanasiri, D.; Maskell, D.L.; Vilathgamuwa, D. A hybrid maximum power point tracking for partially shaded photovoltaic systems in the tropics. Renew. Energy 2015, 76, 53–65. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Rahmani, R.; Mekhilef, S.; Maung Than Oo, A.; Stojcevski, A.; Soon, T.K.; Ghandhari, A.S. Simulation and hardware implementation of new maximum power point tracking technique for partially shaded PV system using hybrid DEPSO method. IEEE Trans. Sustain. Energy 2015, 6, 850–862. [Google Scholar] [CrossRef]
- Daraban, S.; Petreus, D.; Morel, C. A novel {MPPT} (maximum power point tracking) algorithm based on a modified genetic algorithm specialized on tracking the global maximum power point in photovoltaic systems affected by partial shading. Energy 2014, 74, 374–388. [Google Scholar] [CrossRef]
- Lian, K.; Jhang, J.; Tian, I. A maximum power point tracking method based on perturb-and-observe combined with particle swarm optimization. IEEE J. Photovolt. 2014, 4, 626–633. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Kumar, V.V.; Palani, S. Application of a combined particle swarm optimization and perturb and observe method for {MPPT} in {PV} systems under partial shading conditions. Renew. Energy 2015, 75, 308–317. [Google Scholar] [CrossRef]
- Tsai, H.; Tu, C.; Su, Y. Development of Generalized Photovoltaic Model Using MATLAB/SIMULINK. In Proceedings of the World Congress on Engineering and Computer Science (WCECS), San Francisco, CA, USA, 22–24 October 2008. [Google Scholar]
- Seyedmahmoudian, M.; Mekhilef, S.; Rahmani, R.; Yusof, R.; Renani, E. Analytical Modeling of Partially Shaded Photovoltaic Systems. Energies 2013, 6, 128–144. [Google Scholar] [CrossRef] [Green Version]
- Ramabadran, R. MATLAB Based Modelling and Performance Study of Series Connected SPVA under Partial Shaded Conditions. J. Sustain. Dev. 2009, 2, 85–94. [Google Scholar] [CrossRef]
- Salmi, T.; Bouzguenda, M.; Gastli, A.; Masmoudi, A. MATLAB/Simulink Based Modelling of Solar Photovoltaic Cell. Int. J. Renew. Energy Res. 2012, 2, 213–218. [Google Scholar]
- Arcman Solar Power. Available online: http://www.arcmansolar.com/products/28.aspx?cid=7-12-11 (accessed on 16 November 2016).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electrical Characteristic | STP270-24/Vd |
|---|---|
| Optimum Operating Voltage (Vmp) | 35.0 V |
| Optimum Operating Current (Imp) | 7.71 A |
| Open-Circuit Voltage (Voc) | 44.5 V |
| Short-Circuit Current (Isc) | 8.20 A |
| Maximum Power at STC (Pmax) | 270 W |
| Temperature Coefficient of Voc | −0.34%/°C |
| Temperature Coefficient of Isc | 0.045%/°C |
| Fuzzy Logic Type | Sugeno |
|---|---|
| Number of inputs | 2 |
| Number of membership function | 10 |
| No of TRAINING a epochs | 3000 |
| Input membership function type | Gaussian |
| output membership function type | Linear |
| Algorithm used | Grid partitioning |
| Optimization method | Hybrid |
| Case No. | Weather Condition | Ir1 (Watt/m2) | Ir2 (Watt/m2) | Nominal Power (Watt) | Power after Fuzzy (Watt) | Efficiency |
|---|---|---|---|---|---|---|
| 1 | Uniform Irradiation | 1000 | 1000 | 258 | 258 | 100% |
| 2 | 900 | 900 | 232 | 232 | 100% | |
| 3 | 800 | 800 | 207 | 206 | 99.6% | |
| 4 | 700 | 700 | 181 | 179.1 | 99% | |
| 5 | 600 | 600 | 155 | 154.2 | 99.5% | |
| 6 | 500 | 500 | 128.5 | 127.6 | 99.3% | |
| 7 | 400 | 400 | 103.2 | 102.6 | 99.6% | |
| 8 | 740 | 740 | 190.3 | 163.4 | 85.7 | |
| 9 | 585 | 585 | 150.63 | 139.2 | 92.4 | |
| 10 | 597 | 597 | 153.8 | 151.6 | 98.5 | |
| 11 | Partial Shading | 1000 | 300 | 128.1 | 122.5 | 96% |
| 12 | 800 | 300 | 101.4 | 99.3 | 98% | |
| 13 | 500 | 200 | 58.1 | 56.2 | 96.7% | |
| 14 | 400 | 100 | 46.3 | 44.8 | 96.5% | |
| 15 | 700 | 300 | 48.7 | 47.5 | 99% | |
| 16 | 892 | 407 | 126.3 | 106.8 | 84.4% | |
| 17 | 644 | 596 | 103.7 | 92.3 | 89.0% | |
| 18 | 400 | 100 | 46.3 | 38 | 82.1% |
| Controller | Accuracy | Convergence | Oscillations | Trapping |
|---|---|---|---|---|
| Fuzzy | Moderate | Fast | Low | No |
| P&O/large step size | Low | Fast | High | Yes |
| P&O/small step size | High | Slow | Moderate | Yes |
| Hybrid | High | Fast | Moderate | No |
| Case No. | Ir1 (Watt/m2) | Ir2 (Watt/m2) | Nominal Power (Watt) | FLC Alone (Watt) | Hybrid Proposed Algorithm (Watt) |
|---|---|---|---|---|---|
| 1 | 1000 | 300 | 128.1 | 122.5 | 127.9 |
| 2 | 800 | 300 | 101.4 | 99.3 | 101.2 |
| 3 | 500 | 200 | 58.1 | 56.2 | 57.9 |
| 4 | 400 | 100 | 46.3 | 44.8 | 46.2 |
| 5 | 700 | 300 | 48.7 | 47.5 | 48.5 |
| 6 | 892 | 407 | 126.3 | 106.8 | 126.2 |
| 7 | 644 | 596 | 103.7 | 92.3 | 103.5 |
| 8 | 400 | 100 | 46.3 | 38 | 46.1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bataineh, K.; Eid, N. A Hybrid Maximum Power Point Tracking Method for Photovoltaic Systems for Dynamic Weather Conditions. Resources 2018, 7, 68. https://doi.org/10.3390/resources7040068
Bataineh K, Eid N. A Hybrid Maximum Power Point Tracking Method for Photovoltaic Systems for Dynamic Weather Conditions. Resources. 2018; 7(4):68. https://doi.org/10.3390/resources7040068
Chicago/Turabian StyleBataineh, Khaled, and Naser Eid. 2018. "A Hybrid Maximum Power Point Tracking Method for Photovoltaic Systems for Dynamic Weather Conditions" Resources 7, no. 4: 68. https://doi.org/10.3390/resources7040068
APA StyleBataineh, K., & Eid, N. (2018). A Hybrid Maximum Power Point Tracking Method for Photovoltaic Systems for Dynamic Weather Conditions. Resources, 7(4), 68. https://doi.org/10.3390/resources7040068