1. Introduction
Water is required for the survival of all living beings and covers a considerable part of the surface of the Earth. Freshwater makes up only a small percentage of the total. Freshwater is now polluted by effluent discharged without treatment from human activities such as industry and agriculture, which has a negative impact on the aquatic ecosystems of a region. The serious situation in the largest lake in Paraguay, Ypacarai Lake [
1], is one example. The lake has a significant impact on the environment, public health and the local economy. Nonetheless, the lake has been plagued by algae blooms in recent years, which are caused by an abundance of nutrients in the water, a condition known as eutrophication [
2]. Algae blooms are regarded as a major issue because they are not only harmful to human health, but also deplete the oxygen supply in the water [
1,
2].
Monitoring of water resources is one option to address this problem. This task is critical because, with the required sensors, variables such as pH, turbidity, dissolved oxygen and CO
levels, among others, can be calculated and actions can be taken based on the obtained data, with the aim of maintaining or improving the water quality. Nevertheless, the traditional monitoring system has many disadvantages, such as the cost of the equipment, time consumption and the collected data will not be enough for a good modeling of the water quality. Monitoring with three fixed stations, as it is being done in the Ypacarai Lake [
1], will not be efficient either due to the large surface area of the lake. In addition, the data provided do not generate a real model of the conditions of the lake water. In contrast, implementing a monitoring system using Autonomous Surface Vehicles (ASVs) (
Figure 1), as in [
1,
2], will reduce human intervention, cost, and time spent for collecting data [
3]. This monitoring system consists of deploying an ASV or a fleet of ASVs equipped with water quality sensors, in a water body, incorporating a guidance, navigation and control (GNC) system to guide the vehicles across the water surface.
GNC systems allow ASVs to move from one point to another on a determinate path autonomously. In the guidance system, the paths to be followed by the vehicles are generated. They can be generated by a global path planner, which creates an initial path with previous information, and a local path planner, which adapts the trajectories planned by the global planner with environmental information [
4]. In a simple monitoring task, the data collected by the ASVs are not used to recalculate the path; the vehicles only travel through a defined path [
5]. In contrast, an informative global path planning algorithm [
6] generates an optimal path for the monitoring of the water resource and develops a model based on machine learning (ML) with the intention of estimating the state of the water body.
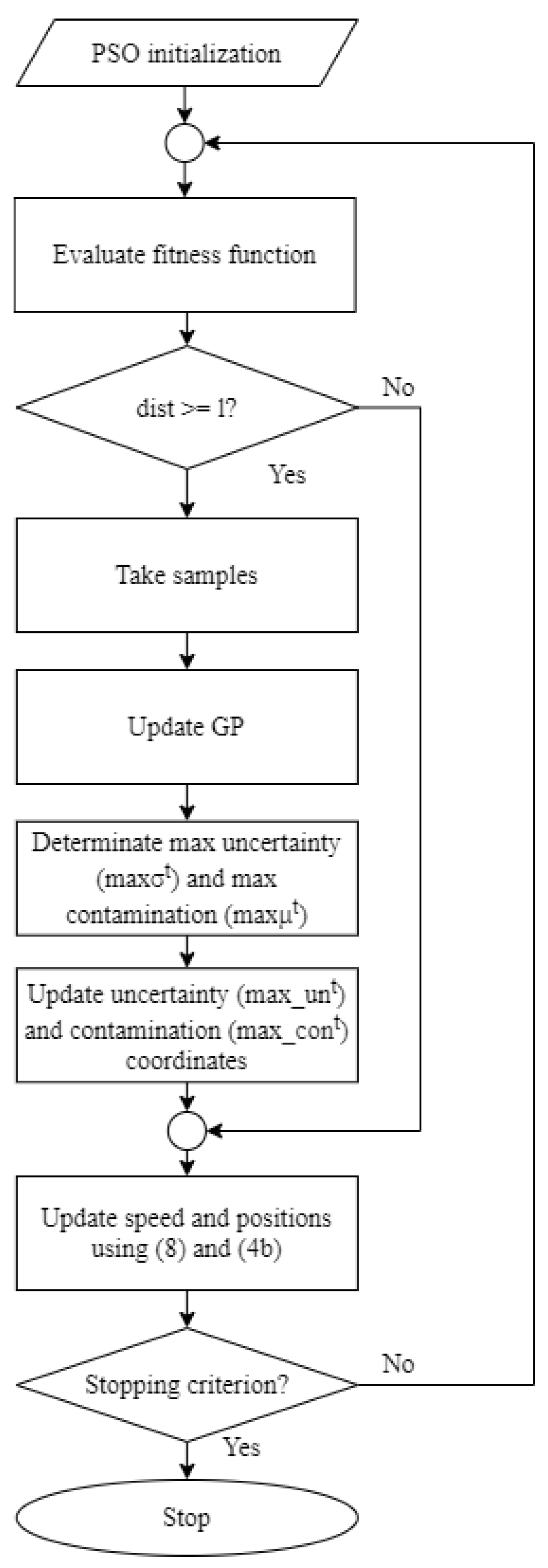
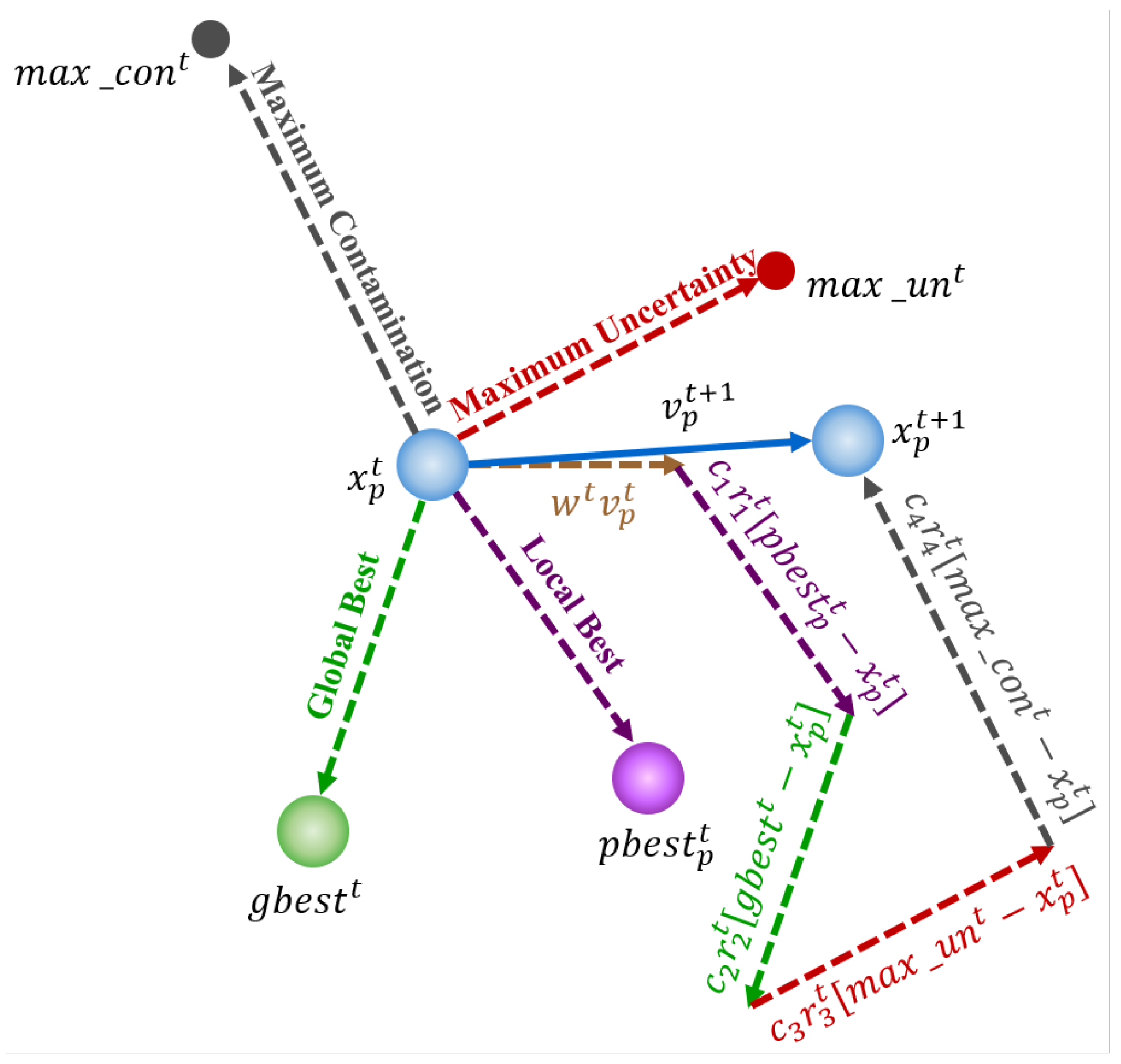
This work seeks to make up for the deficiency of simple monitoring tasks by implementing an informative path planning, an adapted version of a Particle Swarm Optimization (PSO) algorithm [
7] with a Gaussian Process (GP) [
8], as an underlying surrogate model. Each of the ASVs from the fleet is represented by a particle of the swarm. With the proposed algorithm, the movements of the ASVs are determined by the model given by the GP, and also by the parameters of the PSO algorithm. After a certain distance traveled by the ASVs, data is collected, and the GP is updated accordingly. To explore the surface of the water resource, the uncertainty of the GP model is used, and to exploit areas with high contamination levels, the mean of the surrogate model is considered. The objective of the proposed approach is to obtain a suitable regression model of contamination levels of water resources in a limited time. Using the mean of the surrogate model, Ypacarai Lake as ground truth, and the considerable reduction in monitoring time are the main differences between the present work and the previous one [
9].
The main contributions of this paper are:
The development of an informative path planner for a swarm of ASVs for the monitoring system of a water resource based on an improved meta-heuristic algorithm, PSO, with a GP as the underlying surrogate model.
The application of the proposed path planning using as the simulated scenario Ypacarai Lake, showing the superiority of the proposed approach with respect to other techniques.
This paper features the following sections:
Section 2 contains several relevant works related to the proposed approach.
Section 3 includes the statement of the problem and the main assumptions considered solving the monitoring problem. In
Section 4 the proposed approach, based on PSO and GP, is described.
Section 5 contains the simulation results obtained to validate the system.
Section 6 includes the conclusions and future works. Finally,
Appendix A, shows some obtained results of hyper-parameter optimization.
2. Related Works
Autonomous vehicles, both aquatic and aerial, have been the subject of extensive research in the previous decade [
10]. Within the applications of autonomous vehicles, monitoring of water resources can be found [
1,
11,
12]. The task is carried out by equipping an ASV with water quality sensors. To guide the vehicles, in [
1], the authors propose an offline path planning of an ASV using a meta-heuristic technique, Genetic Algorithm (GA), and model the monitoring problem as the classical Travelling Salesman Problem (TSP). The main objective of the proposed offline path planning is to maximize the coverage of the surface of Ypacarai Lake. For this reason, a set of beacons located at the coast of the lake was considered. In [
13], the authors extend the previous work, the main difference lies in the model of the monitoring problem, the problem is modelled using the Chinese Postman Problem (CPP). The CCP allows the planning of a path that repeats the visit to the beacons of the graph, different from TSP. As a result, the distance traveled by the ASV and the covered area increase its values. Furthermore, in [
2], the authors combine exploration and intensification capabilities of their approach by online learning of the scenario. A global path planning is developed in [
11] using Deep Reinforcement Learning (DRL). The authors model the monitoring problem as a Markov Decision Process, the states are represented as an RGB image of Ypacarai Lake and the potential positions of the ASV are the actions. In a more recent work [
3], the authors work with multiple agents and the strategy applied was a centralized approach. In [
14], the authors compare the performance of the Evolutionary Algorithm (EA) and deep reinforcement learning methodologies as monitoring systems. The results demonstrate the efficiency of the DRL technique under high-resolution conditions. The EA, on the other hand, delivers better results with lower resolution scenarios. Furthermore, the number of required hyper-parameters differs for each methodology; the evolutionary method requires few hyper-parameters to achieve a stable operation, whereas the DRL requires many. In addition, the DRL shows a high sensibility with respect to some hyper-parameters. However, DRL outperforms for the non-homogeneous patrolling problem for higher resolution scenarios, which demonstrates that the DRL methodology is more suitable as the complexity of the problem increases.
Bio-inspired techniques have been mainly employed as path planners and monitoring algorithms for water resources [
15]. Bio-inspired techniques based on Swarm Intelligence (SI) have the advantage of working with several agents/particles simultaneously. Another advantage of SI is to efficiently solve nonlinear real world problems [
16]. For path planning, algorithms as Ant Colony Optimization (ACO) [
17,
18], Bat Algorithm (BA) [
19,
20], Firefly Algorithm (FA) [
21,
22], and PSO [
23,
24], among others, can be used. In
Table 1 is shown a comparison between some SI algorithms [
25,
26].
PSO algorithm is selected to be used in this work due to the easy implementation of the algorithm, the low number of parameters that must be adjusted and the large number of articles found where PSO and improved versions of PSO are applied to solve path planning problems for mobile robots and unmanned vehicles. In [
23], three improved versions of PSO are proposed with the objective to enhance the robustness and avoid premature convergence. The strategies applied by the authors are the dynamic modification of the coefficients of PSO (inertia, local best and global best) and a random grouping inversion. The results demonstrate the effectiveness of the modifications, showing that by varying the coefficients and dividing the swarm into subgroups, the algorithm achieves better performance. In [
24], the authors apply the Chaotic and Share-learning Particle Swarm Optimization (CSPSO) to solve the TSP problem and multi-objective path control. The algorithm is employed for marine environments and, in addition to improve the PSO algorithm, two-level collision avoidance rules and the impact of currents are provided. The PSO technique can also be combined with Elite Group-based Evolutionary Algorithms (EGEA), as in [
27]. In EGEA, each individual of the evolutionary algorithm is capable to create its own groups of new solution. Afterward, according to the method, the individual with the best new solution of each group (Group Individual Elitist Selection (GIES)) or the best individuals in the whole group (Whole Population Elitist Selection (WPES)) are selected to the next generation. Based on the results, the best method for the PSO algorithm is the GIES. The reason for this is the influence of the best local of the particle. With the WPES method, particles with poor solutions are discarded and, as a result, huge changes are constantly made and the particle cannot maintain its best position, instead of the GIES method, which helps the selection of the best child of each particle.
A suitable path for monitoring systems can be generated using the data collected by the sensors. However, the collected data must be of high-quality. This problem is known as Informative Path Planning (IPP) problem [
28]. Several approaches based on heuristics and approximation techniques have been proposed to solve this problem [
29]. Informative Path Planning (IPP) techniques based on GP have been used to maximize the information collected by sensors [
12,
30]. Bayesian optimization (BO) based path planning with GP as underlying surrogate model is proposed in [
12]. The authors present an analysis regarding the main components of the strategy, the acquisition functions (probability of improvement, expected improvement, scaled expected improvement, etc.) and the kernel (constant, radial basis function, Matérn, among others). Moreover, new adaptations of the classical methods of the acquisition functions are developed to improve the monitoring task of an ASV. An extension of this work can be found in [
31], where the authors improved the monitoring system by adding a fusion of acquisitions functions. The purpose of the modification is that, when several water quality parameters are considered, a multi-function estimation scenario is generated due to different acquisition functions obtained. In [
5], an online IPP framework is proposed. The authors use a sparse GP method to estimate sea surface temperature values. For the generation of the next point to visit, the path planning algorithm uses the variance in current prediction and remaining mission time. The results of the IPP are compared with the lawn mower paths. The IPP presents better match with the ground truth and lower root mean square error values than the lawn mower paths. IPP can also be used in aerial unmanned autonomous vehicles, as in [
32], where the authors proposed two novel acquisitions functions for IPP with the objective of identifying anomalies in unknown environments.
In monitoring tasks, meta-heuristic algorithms such as GA [
1,
13] and PSO [
23] try to maximize the covered area of the surface of water resources. However, these algorithms are unable to create a model of the water quality. Accordingly, a novel IPP is proposed in this work, combining meta-heuristic algorithm (PSO) with GP as surrogate model. In order to generate an optimal path to collect high-quality samples, the collected data is considered. By considering the collected data, the ASVs will be able to explore the water surface, by taking into consideration the uncertainty of the GP, and to exploit the sites with the highest levels of contamination, by weighting the movements of the ASVs with respect to the mean of the GP. Therefore, the proposed approach tries to balance adequately the mean and uncertainty of the GP in the monitoring task. Since the proposed approach incorporates up to four components (global best, local best, mean of the GP, and uncertainty of the GP) in the movement calculation of the ASV, suitable values for them should be selected. For this purpose, a BO-based hyper-parameter optimization will be applied. It uses prior information to obtain the parameter distribution, and it is widely used for machine learning models [
33,
34,
35].






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







