
Research on Mechanism and Damping Control Strategy of DFIG-Based Wind Farm Grid-Connected System SSR Based on the Complex Torque Method


Abstract
:1. Introduction
2. Materials and Methods
2.1. Model Assumptions
2.2. System Model and Equations
2.3. Transfer Function of RSC Control
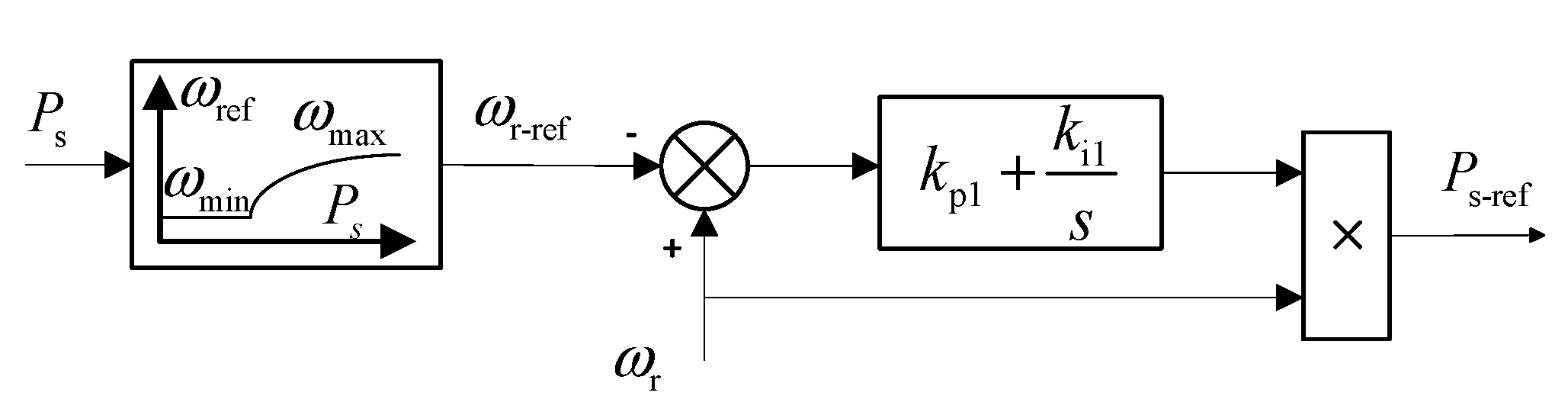
2.4. Transfer Function of Rotor Speed Control
3. Results
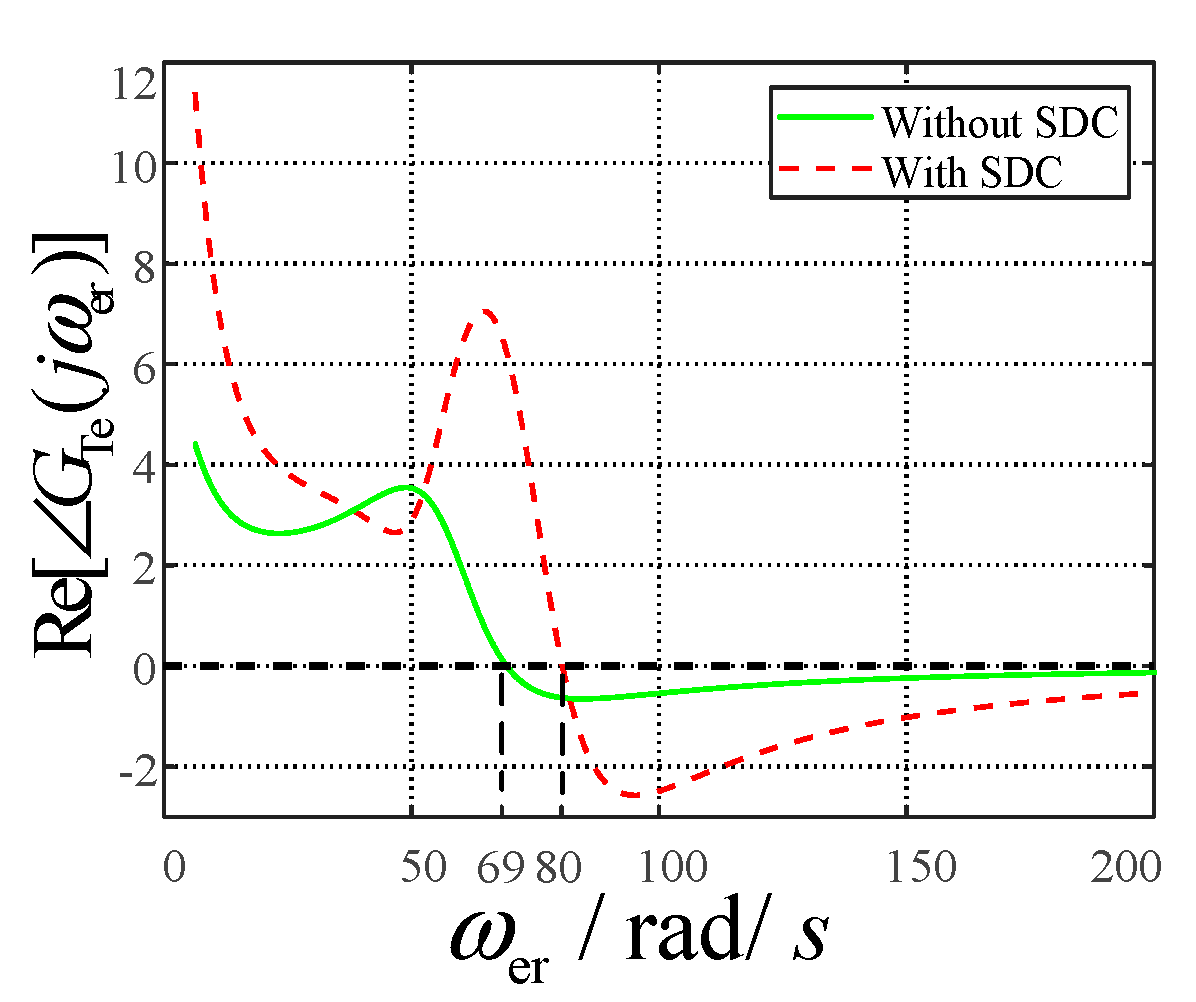
3.1. Electrical Damping Expression
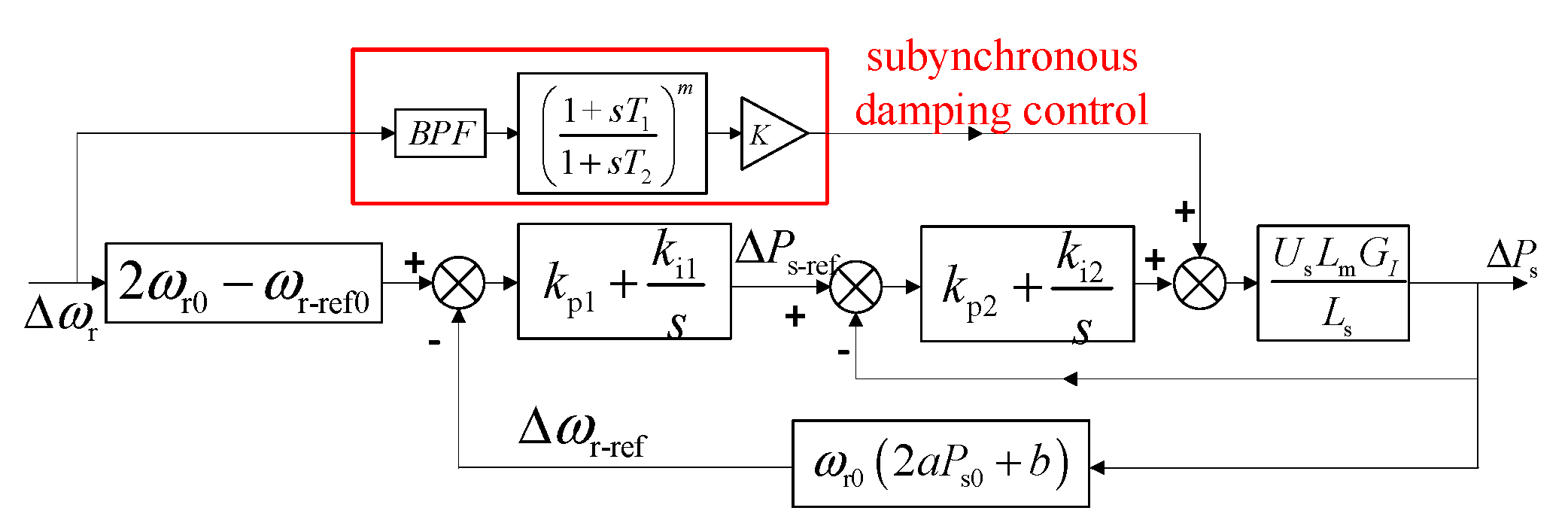
3.2. Design of Proposed Damping Controller
4. Discussion
4.1. Description of Analysis and Simulation Parameters Setting
4.2. Impact Parameters and Sensitivity Analysis
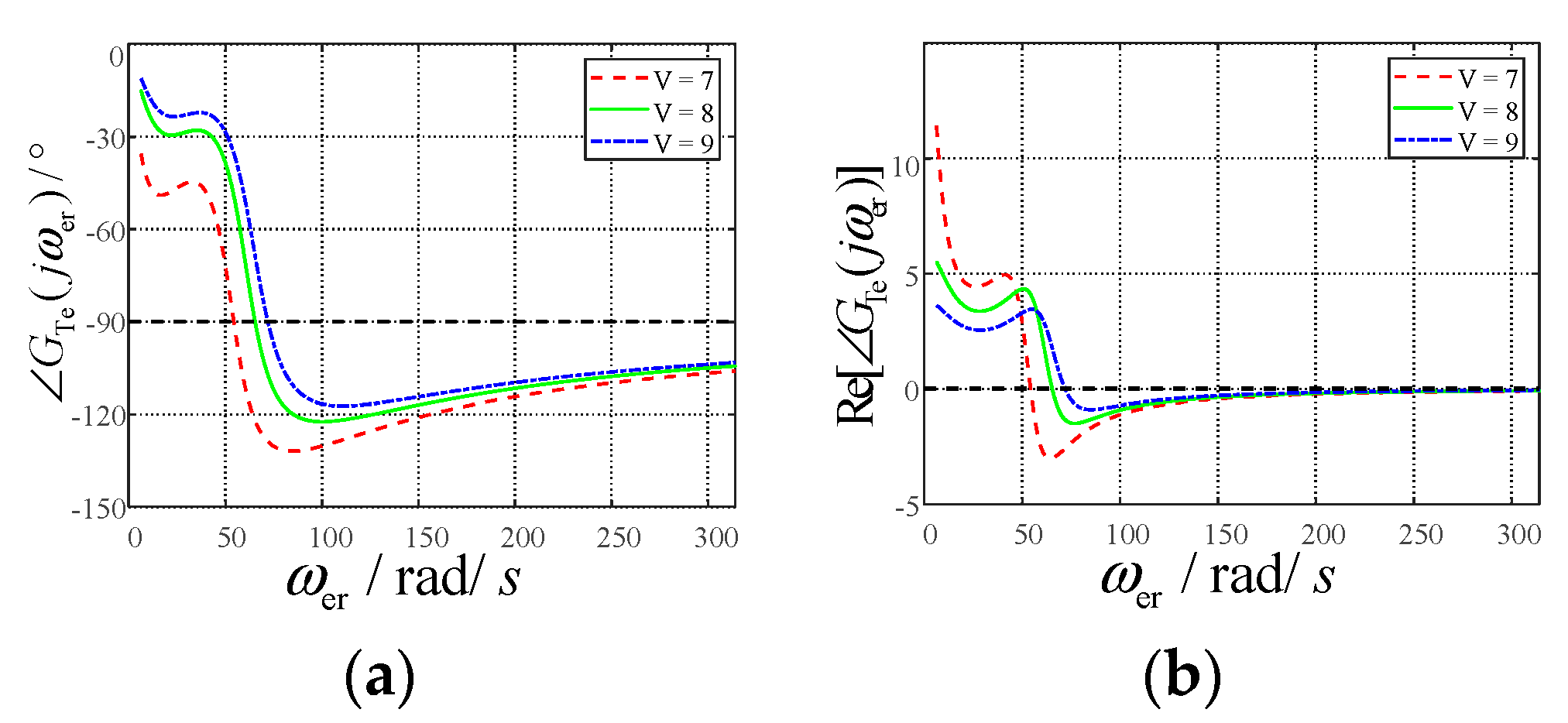
4.2.1. Impact of Wind Speed on SSR Electrical Damping
4.2.2. Impact of Controller Parameters on SSR Electrical Damping
4.2.3. The Sensitivity of the Controller Parameters
4.2.4. Comparison with Other Literature Results
4.3. Time-Domain Simulation Verification
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Rated power | 200 MW |
| Rated voltage | 690 V |
| Ls(p.u.) | 4.60 |
| Lr(p.u.) | 4.61 |
| Lm(p.u.) | 4.50 |
| Rs(p.u.) | 0.0054 |
| Rr(p.u.) | 0.00607 |
| Dm(p.u.) | 0.01 |
| Parameters | Value |
|---|---|
| kp1(p.u.) | 1.5 |
| ki1(p.u.) | 10 |
| kp2(p.u.) | 1.8 |
| ki2(p.u.) | 20 |
| kp3(p.u.) | 0.5 |
| ki3(p.u.) | 2.0 |
References
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Adams, J.; Pappu, V.A.; Dixit, A. Ercot experience screening for Sub-Synchronous Control Interaction in the vicinity of series capacitor banks. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–5. [Google Scholar]
- Mohammadpour, H.A.; Santi, E. Analysis of subsynchronous control interactions in DFIG-based wind farms: ERCOT case study. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition, Montreal, QC, Canada, 20–24 September 2015; pp. 500–505. [Google Scholar]
- Wang, L.; Xie, X.; Jiang, Q.; Liu, H.; Li, Y.; Liu, H. Investigation of SSR in practical DFIG-based wind farms connected to a series-compensated power system. IEEE Trans. Power Syst. 2015, 30, 2772–2779. [Google Scholar] [CrossRef]
- Fan, L.; Kavasseri, R.; Miao, Z.; Zhu, C. Modeling of DFIG-based wind farms for SSR analysis. IEEE Trans. Power Del. 2010, 25, 2073–2082. [Google Scholar] [CrossRef]
- Fan, L.; Zhu, C.; Miao, Z.; Hu, M. Modal analysis of a DFIG-based wind farm interfaced with a series compensated network. IEEE Trans. Energy Convers. 2011, 26, 1010–1020. [Google Scholar] [CrossRef]
- Mohammadpour, H.A.; Santi, E. Modeling and control of gate-controlled series capacitor interfaced with a DFIG-based wind farm. IEEE Trans. Ind. Electron. 2015, 62, 1022–1033. [Google Scholar] [CrossRef]
- Mishra, Y.; Mishra, S.; Tripathy, M.; Senroy, N.; Dong, Z. Improving stability of a DFIG-based wind power system with tuned damping controller. IEEE Trans. Energy Convers. 2009, 24, 650–660. [Google Scholar] [CrossRef]
- ABB. Series Compensation Boosting Transmission Capacity; Reference Case Study; ABB: Zürich, Switzerland, 2010. [Google Scholar]
- Sun, J. Impedance-based stability criterion for grid-connected inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Sun, J. Small-signal methods for ac distributed power systems. IEEE Trans. Power Electron. 2009, 24, 2545–2554. [Google Scholar]
- Miao, Z. Impedance-model-based SSR analysis for type 3 wind generator and series-compensated network. IEEE Trans. Energy Convers. 2012, 27, 984–991. [Google Scholar] [CrossRef]
- Piyasinghe, L.; Miao, Z.; Khazaei, J.; Fan, L. Impedance model-based SSR analysis for TCSC compensated Type-3 wind energy delivery systems. IEEE Trans. Sustain. Energy 2015, 6, 179–187. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; Li, Y.; Liu, H.; Hu, Y. A small-signal impedance method for analyzing the SSR of series-compensated DFIG-based wind farms. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar]
- Badrzadeh, B.; Sahni, M.; Zhou, Y.; Muthumuni, D.; Gole, A. General methodology for analysis of sub-synchronous interaction in wind power plants. IEEE Trans. Power Syst. 2013, 28, 1858–1869. [Google Scholar] [CrossRef]
- Chowdhury, M.A.; Shafiullah, G.M. SSR mitigation of series-compensated DFIG wind farms by a nonlinear damping controller using partial feedback linearization. IEEE Trans. Power Syst. 2018, 33, 2528–2538. [Google Scholar] [CrossRef]
- Huang, P.; Moursi, M.S.E.I.; Xiao, W.; Kirtley, J.L. Subsynchronous resonance mitigation for series-compensated DFIG-Based wind farm by using two-degree-of-freedom control strategy. IEEE Trans. Power Syst. 2015, 30, 1442–1454. [Google Scholar] [CrossRef]
- Azizi, A.H.; Rahimi, M. Analytical assessment of subsynchronous resonance (SSR) impact on doubly fed induction generator wind turbine behavior and efficient suppression of SSR oscillations. Int. Trans. Electr. Energy Syst. 2021, 31, e12798. [Google Scholar] [CrossRef]
- Yang, J.-W.; Sun, X.-F.; Chen, F.-H.; Liao, K.; He, Z.-Y. Subsynchronous resonance suppression strategy for doubly fed induction generators based on phase-shift average of rotor current. Int. Trans. Electr. Energy Syst. 2019, 29, e2831. [Google Scholar] [CrossRef]
- Jannaty, B.H.; Marc, B. Suppression of Sub-Synchronous Resonances Through Excitation Control of Doubly Fed Induction Generators. IEEE Trans. Power Syst. 2019, 34, 4329–4340. [Google Scholar]
- Chen, A.; Xie, D.; Zhang, D.; Gu, C.; Wang, K. PI Parameter Tuning of Converters for Sub-Synchronous Interactions Existing in Grid-Connected DFIG Wind Turbines. IEEE Trans. Power Electron. 2019, 34, 6345–6355. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; Li, Y.; Liu, H.; Hu, Y. Mitigation of SSR by embedding subsynchronous notch filters into DFIG converter controllers. IET Gener. Transm. Distrib. 2017, 11, 2888–2896. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; He, J.; Liu, H.; Li, Y. Damping DFIG-associated SSR by Adding Subsynchronous Suppression Filters to DFIG Converter Controllers. In Proceedings of the IEEE-Power-and-Energy-Society General Meeting, Boston, MA, USA, 17–21 July 2016. [Google Scholar]
- Meng, Y.; Pan, X.; Ma, H.; Li, K.; Yu, J.; Wang, X. Analysis and mitigation of subsynchronous resonance based on integral control for DFIG-based wind farm. IET Gener. Transm. Distrib. 2019, 13, 1718–1725. [Google Scholar] [CrossRef]
- He, H.; Lv, D.; Wen, L.; Geng, H.; Gao, J. Analysis and Suppression Strategies of Sub-synchronous Resonance on DFIG. In Proceedings of the IEEE International Power Electronics and Application Conference and Exposition, Shenzhen, China, 4–7 November 2018; pp. 1016–1020. [Google Scholar]
- Mohammadpour, H.A.; Santi, E. SSR damping controller design and optimal placement in rotor-side and grid-side converters of series compensated DFIG-based wind farm. IEEE Trans. Sustain. Energy 2015, 6, 388–399. [Google Scholar] [CrossRef]
- Li, N.; Wang, L.; Yang, H.; Ma, H. Stability Analysis for SSR of DFIG-Based Wind Farm Considering STATCOM Capacity Constraint. In Proceedings of the 22nd International Conference on Electrical Machines and Systems, Harbin, China, 11–14 August 2019; pp. 1576–1581. [Google Scholar]
- Viqar, Y.; Aijaz, A. Unit Template Based Control Design for Alleviation and Analysis of SSR in Power System Using STATCOM. Electr. Power Compon. Syst. 2019, 47, 1805–1813. [Google Scholar]
- Yao, J.; Wang, X.; Li, J.; Liu, R.; Zhang, H. Sub-synchronous resonance damping control for series-compensated DFIG-based wind farm with improved particle swarm optimization algorithm. IEEE Trans. Energy Convers. 2019, 34, 849–859. [Google Scholar] [CrossRef]
- Leon, A.E. Integration of DFIG-based wind farms into series compensated transmission systems. IEEE Trans. Sustain. Energy 2016, 7, 451–460. [Google Scholar] [CrossRef]
- Varma, R.K.; Auddy, S.; Semsedini, Y. Mitigation of subsynchronous resonance in a series-compensated wind farm using FACTS controllers. IEEE Trans. Power Del. 2008, 23, 1645–1654. [Google Scholar] [CrossRef]
- Moharana, A.; Varma, R.; Seethapathy, R. SSR alleviation by STATCOM in induction-generator-based wind farm connected to series compensated line. IEEE Trans. Sustain. Energy 2014, 5, 947–957. [Google Scholar] [CrossRef]
- Li, W.; Dinh-Nhon, T. Stability enhancement of a power system with a PMSG-based and a DFIG-based offshore wind farm using a SVC with an adaptive-network-based fuzzy inference system. IEEE Trans. Ind. Electron. 2013, 60, 2799–2807. [Google Scholar]
- Fernandez, L.M.; Jurado, F.; Saenz, J.R. Aggregated dynamic model for wind farms with doubly fed induction generator wind turbines. Renew. Energy 2008, 33, 129–140. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; Zhang, C.; Li, Y.; Hu, Y. Quantitative SSR analysis of series-compensated DFIG-Based wind farms using aggregated RLC circuit model. IEEE Trans. Power Syst. 2017, 32, 474–483. [Google Scholar] [CrossRef]
- Kovacs, P.K. Transient Phenomena in Electrical Machines; Elsevier: New York, NY, USA, 1984. [Google Scholar]
- Abad, G.; Lopez, J.; Rodriguez, M.; Marroyo, L.; Iwanski, G. Doubly Fed Induction Machine: Modeling and Control for Wind Energy Generation; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Zhu, X.; Sun, H.; Wen, J.; Cheng, S. Improved complex torque coefficient method using CPCM for multi-machine system SSR analysis. IEEE Trans. Power Syst. 2014, 29, 2060–2068. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, Y.; Fang, R.; Xu, D. Impedance Modeling and SSR Analysis of DFIG Using Complex Vector Theory. IEEE Access 2019, 3, 155860–155870. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, X.; Chen, R.; Zhou, J.; Qin, S.; Bi, R.; Sun, H. Research on Mechanism and Damping Control Strategy of DFIG-Based Wind Farm Grid-Connected System SSR Based on the Complex Torque Method. Electronics 2021, 10, 1640. https://doi.org/10.3390/electronics10141640
Peng X, Chen R, Zhou J, Qin S, Bi R, Sun H. Research on Mechanism and Damping Control Strategy of DFIG-Based Wind Farm Grid-Connected System SSR Based on the Complex Torque Method. Electronics. 2021; 10(14):1640. https://doi.org/10.3390/electronics10141640
Chicago/Turabian StylePeng, Xiaotao, Renjie Chen, Jicheng Zhou, Shiyao Qin, Ran Bi, and Haishun Sun. 2021. "Research on Mechanism and Damping Control Strategy of DFIG-Based Wind Farm Grid-Connected System SSR Based on the Complex Torque Method" Electronics 10, no. 14: 1640. https://doi.org/10.3390/electronics10141640
APA StylePeng, X., Chen, R., Zhou, J., Qin, S., Bi, R., & Sun, H. (2021). Research on Mechanism and Damping Control Strategy of DFIG-Based Wind Farm Grid-Connected System SSR Based on the Complex Torque Method. Electronics, 10(14), 1640. https://doi.org/10.3390/electronics10141640