
Concrete Cracks Detection and Monitoring Using Deep Learning-Based Multiresolution Analysis




Abstract
:1. Introduction
- Wavelet-based multiresolution analysis is a tool that allows analysis at multiple scales or resolutions and mimics the effect of a microscope [10];
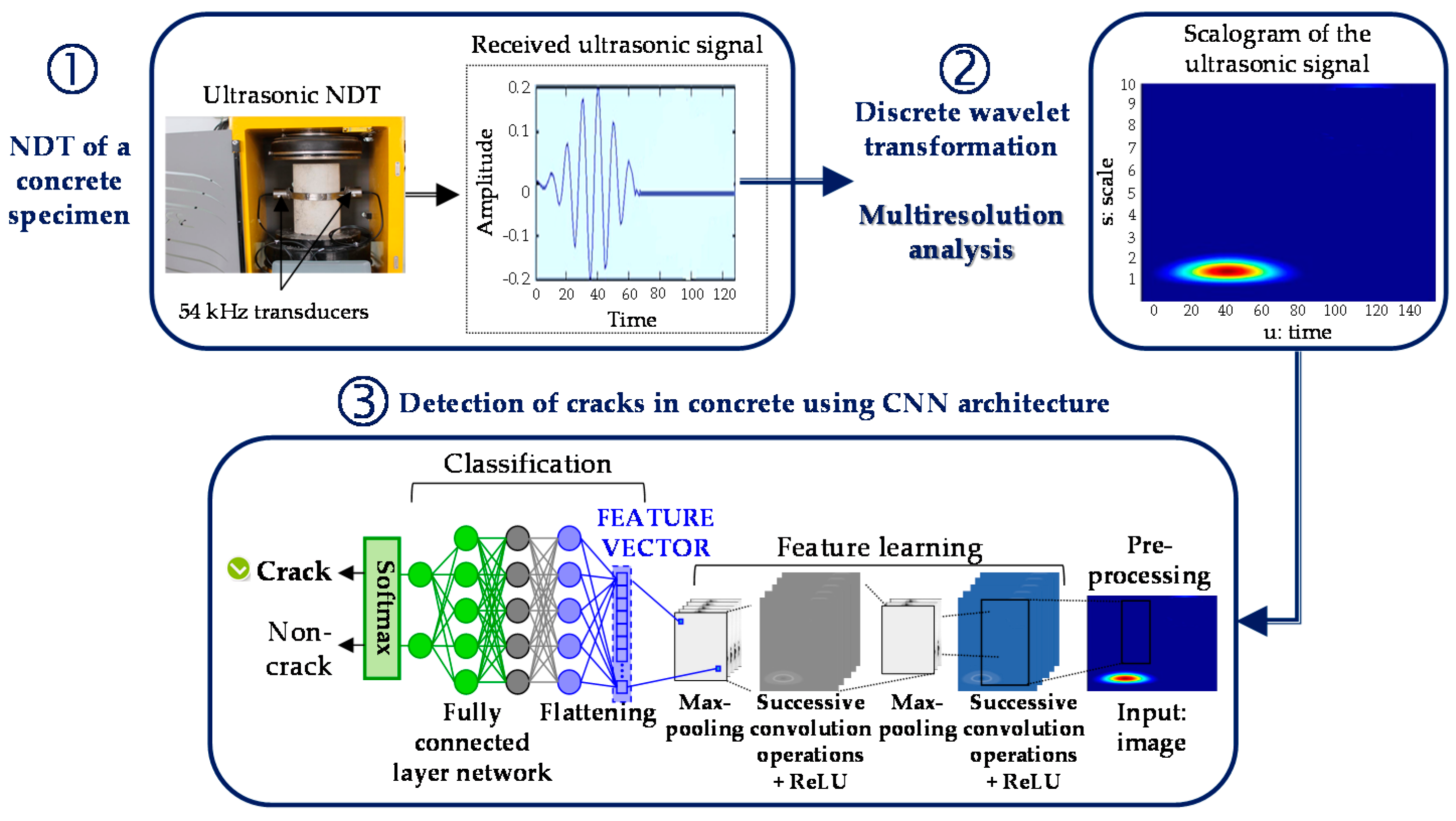
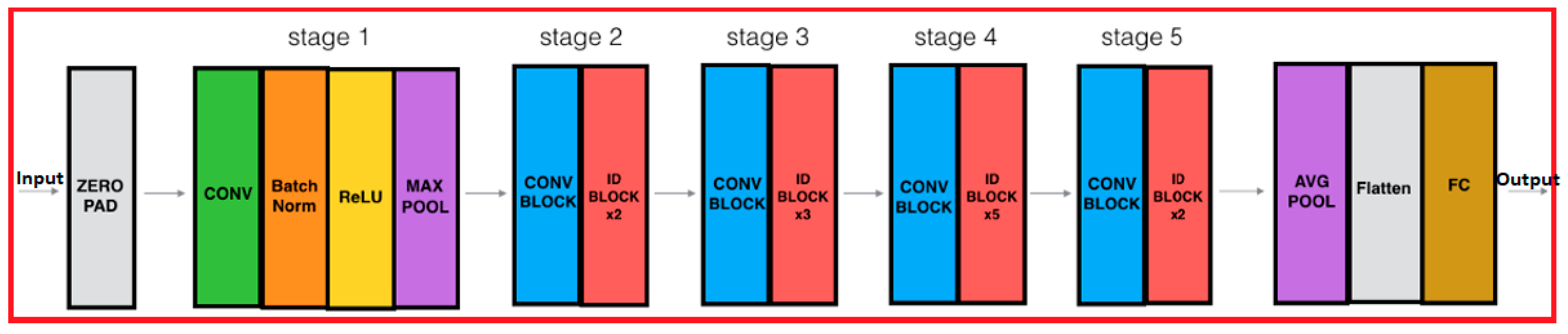
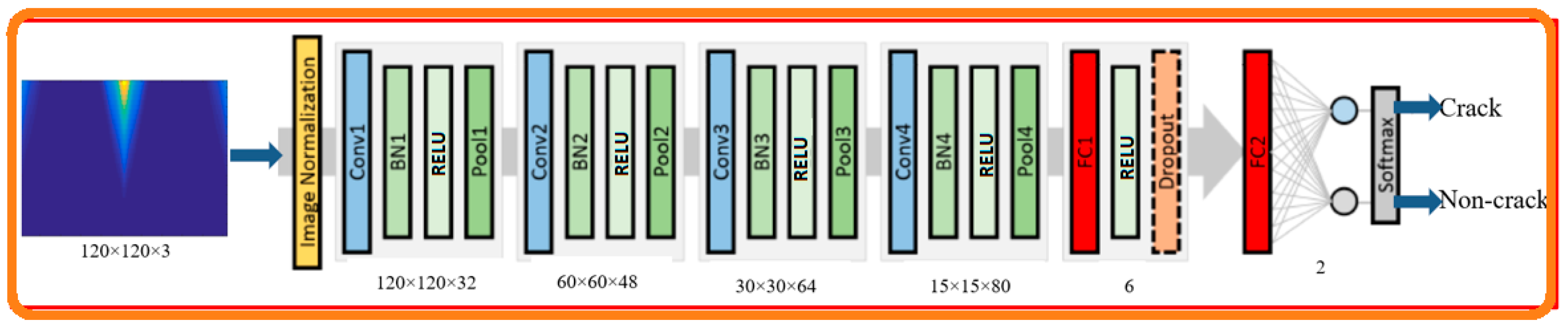
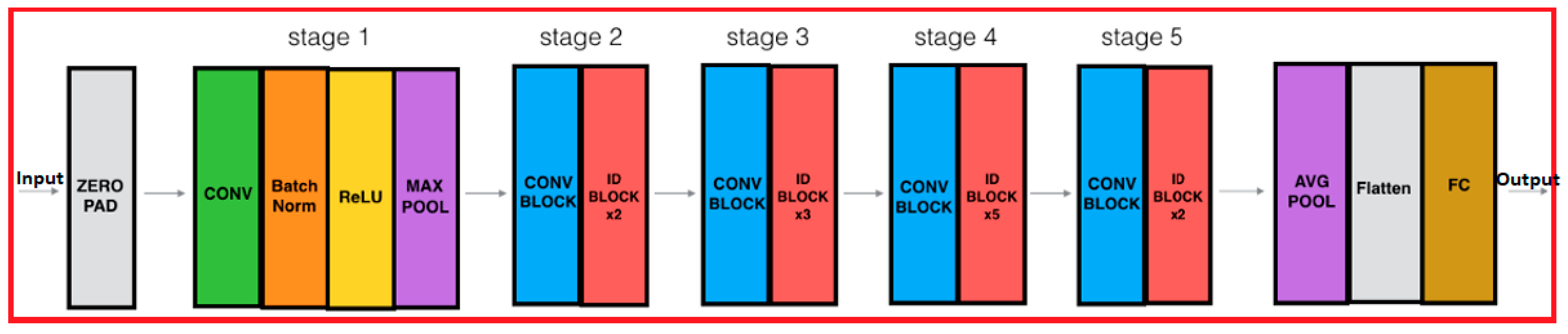
- Deep learning is a type of artificial intelligence where the machine is able to learn by itself, as opposed to programming where it simply executes predetermined rules. Deep learning is based on neural networks with several layers of hidden neurons, each receiving and interpreting information from the previous layer. The most powerful deep learning architecture is called convolutional neural networks (CNN). CNN is broadly composed of three types of layers: convolution, pooling and fully connected layers. CNN receive input images, automatically detect and extract the features of each of them. This is done by the first two layers, i.e. convolution and pooling. The third is a fully connected layer that transforms the extracted features into a final output, such as classification. Moreover, the specific architecture of this network allows the extraction of features of different complexity, from basic or low level as edges, corners, texture to the most complex or high level as patterns, objects. The automatic extraction and prioritization of features, which are adapted to the given problem, is one of the strengths of CNN. In 2012, at the annual ILSVRC (ImageNet Large Scale Visual Recognition Challenge) computer vision competition, a new CNN-based Deep Learning algorithm, named AlexNet, broke all records [11]. CNN has since then been the best performing model for image classification. This is what motivated its use in our experiment.
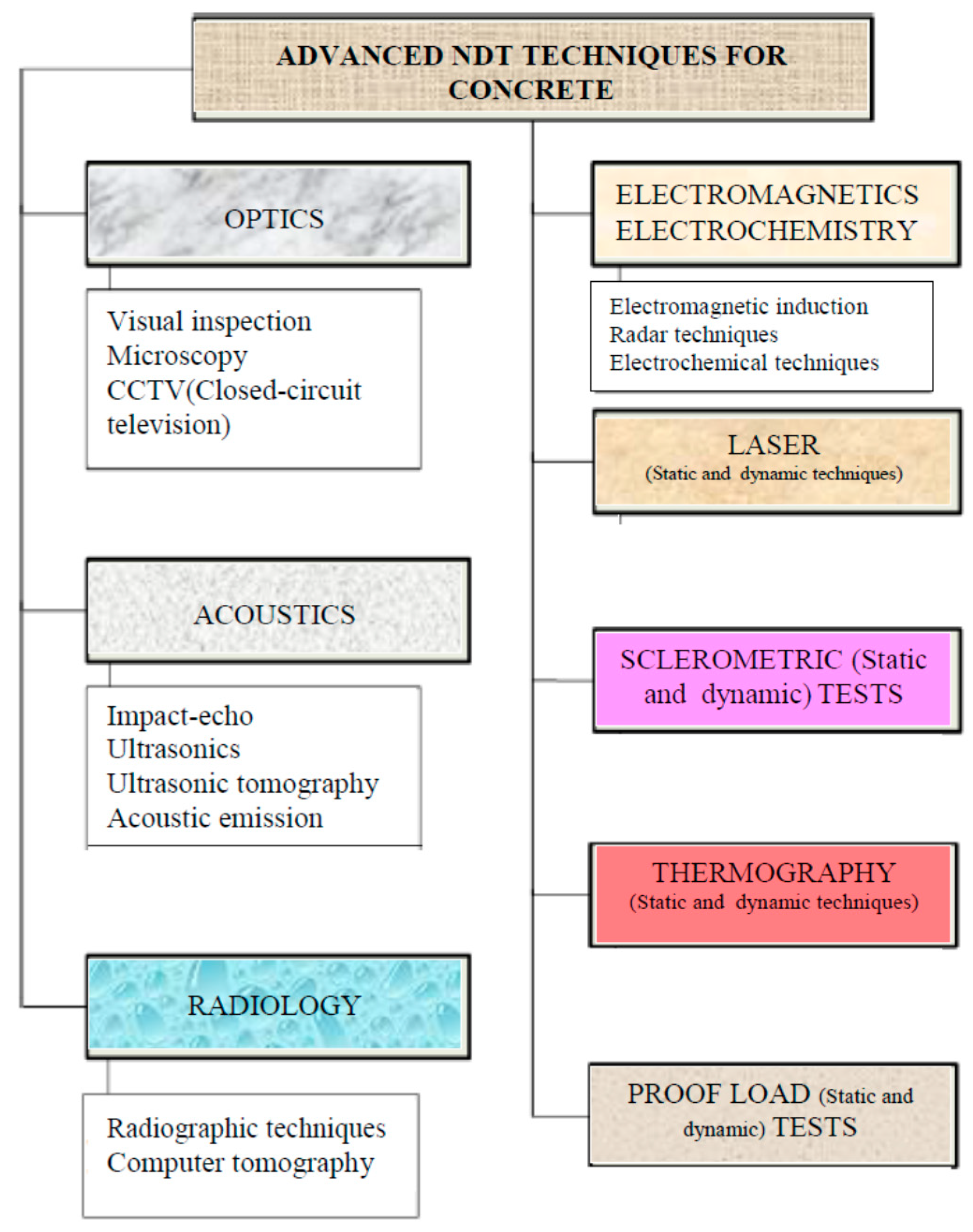
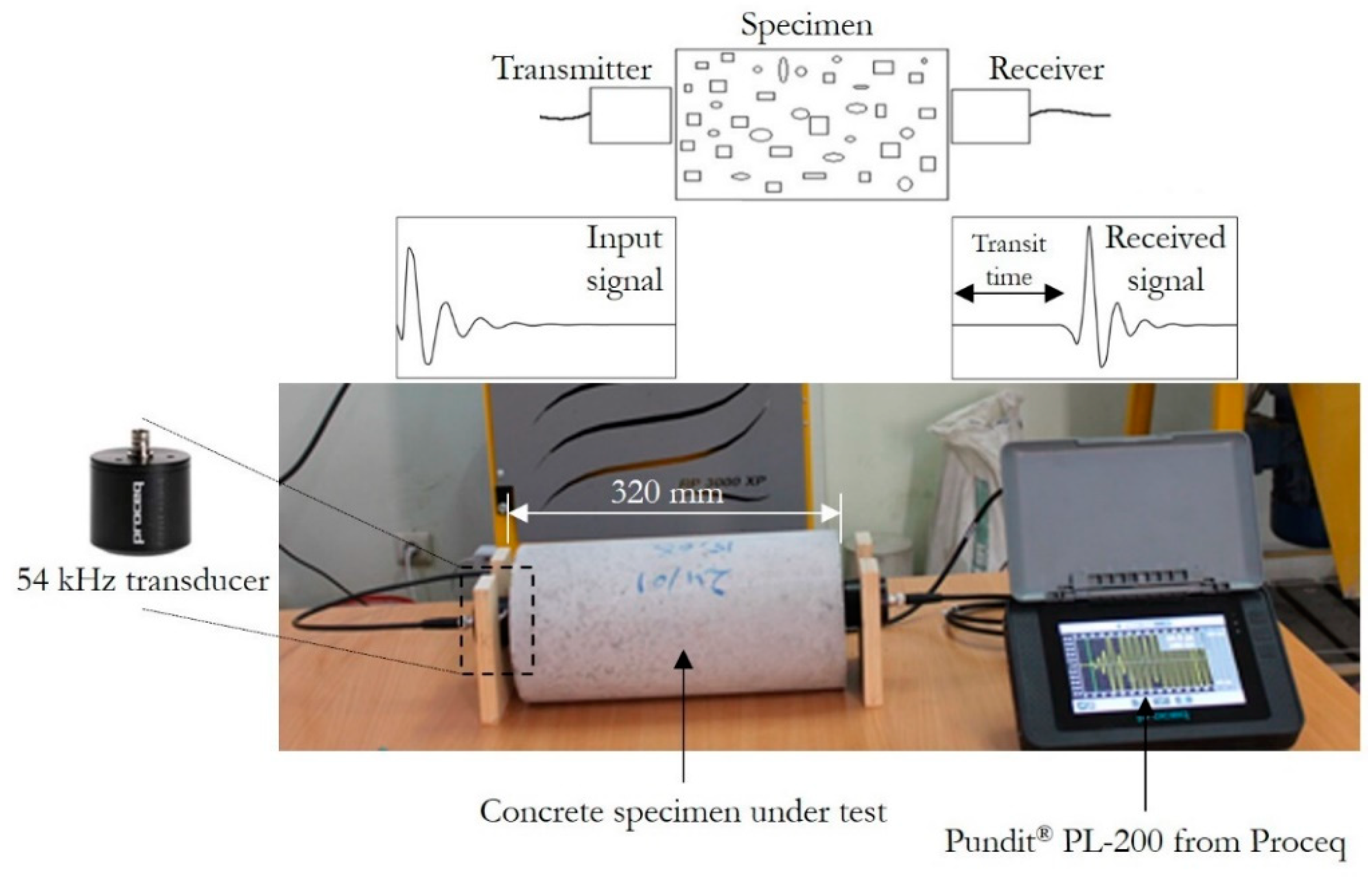
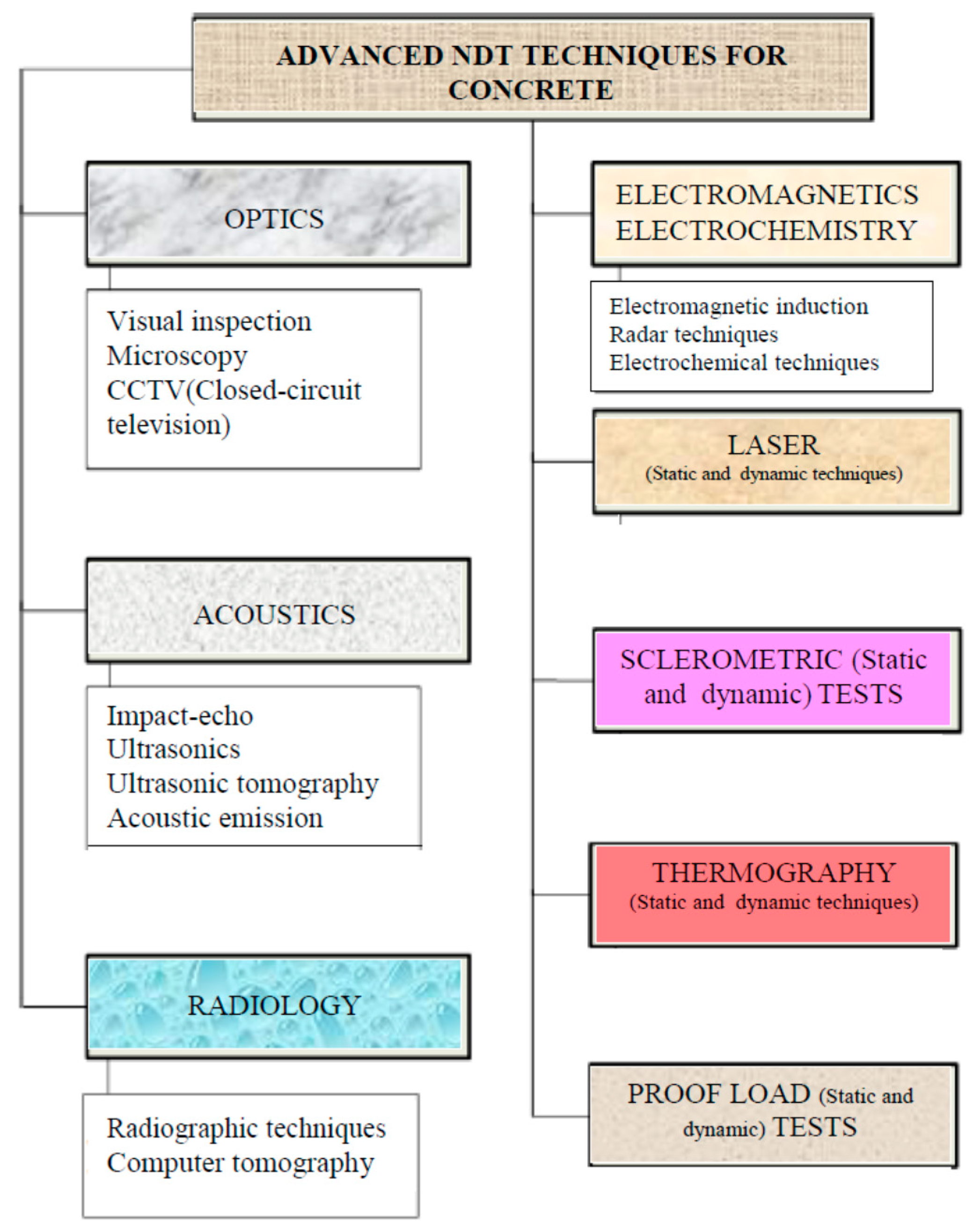
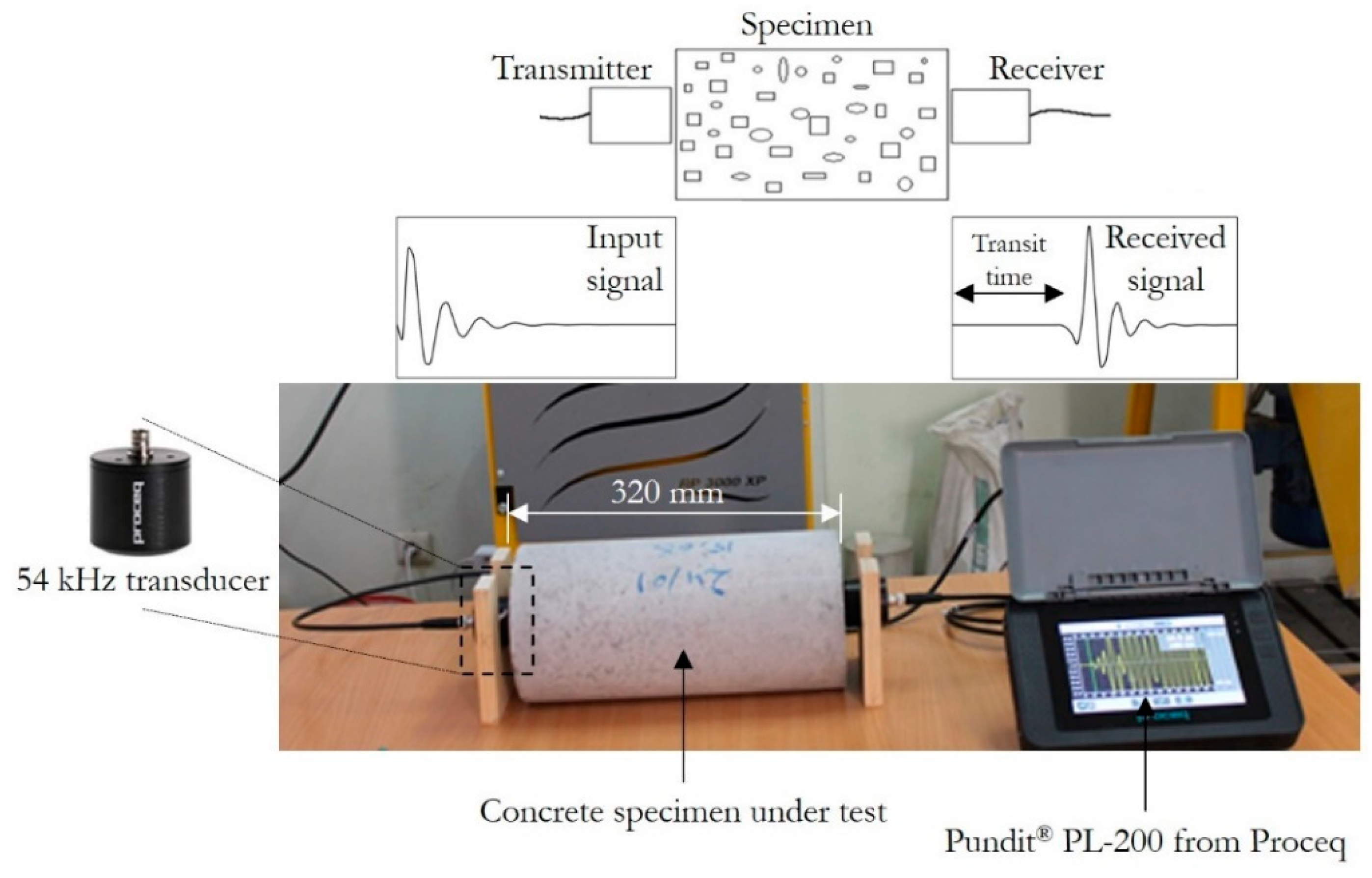
- It presents and recalls NDT methods and techniques as well as the experimental set-up used;
- It introduces the main properties of the wavelet transform and the corresponding multiresolution analysis;
- It recalls the foundations of neural networks and CNN-based Deep Learning, and proposes the adopted architecture to build a classifier for detecting internal cracks from the obtained spatial-scale images.
2. Materials and Methods
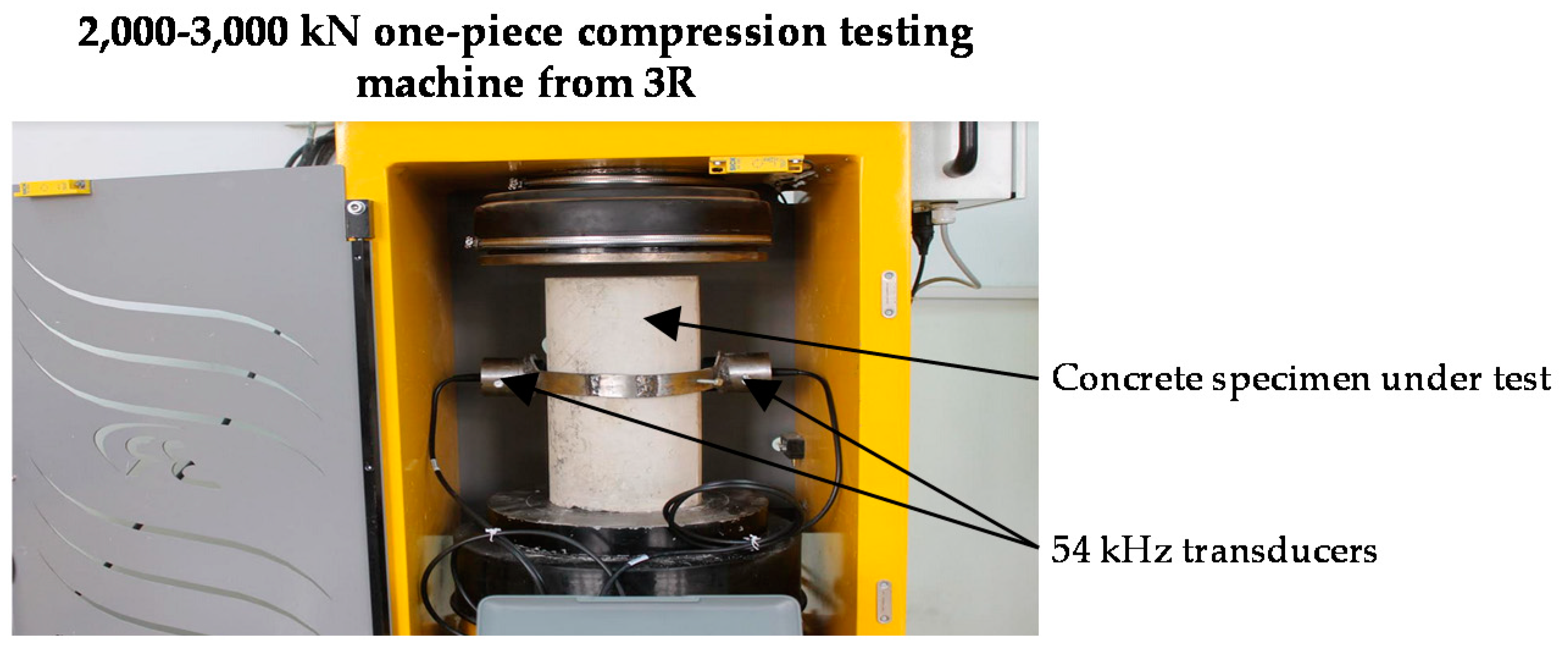
2.1. NDT Methods
2.2. Multiresolution Analysis Based on Wavelets
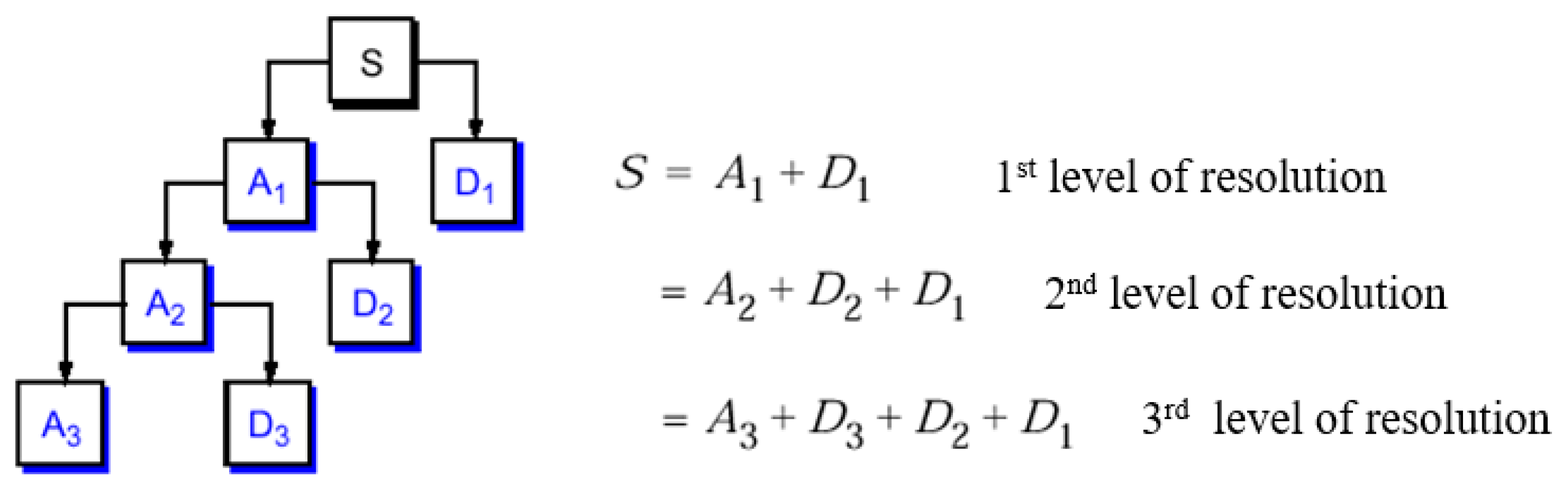
2.2.1. Concepts of Multiresolution Analysis
- Global view at an arbitrary resolution;
- Exact local view;
- Progressive transmission by network;
- Compression.
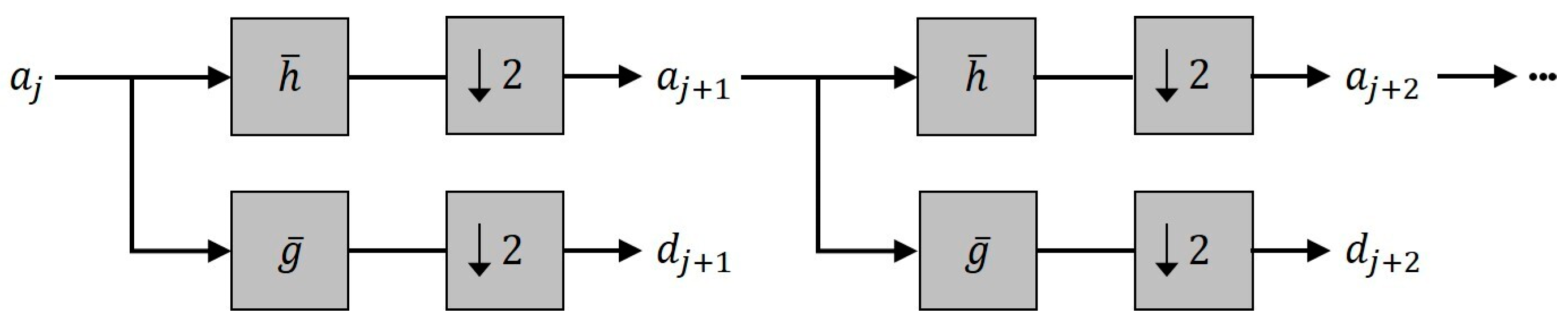
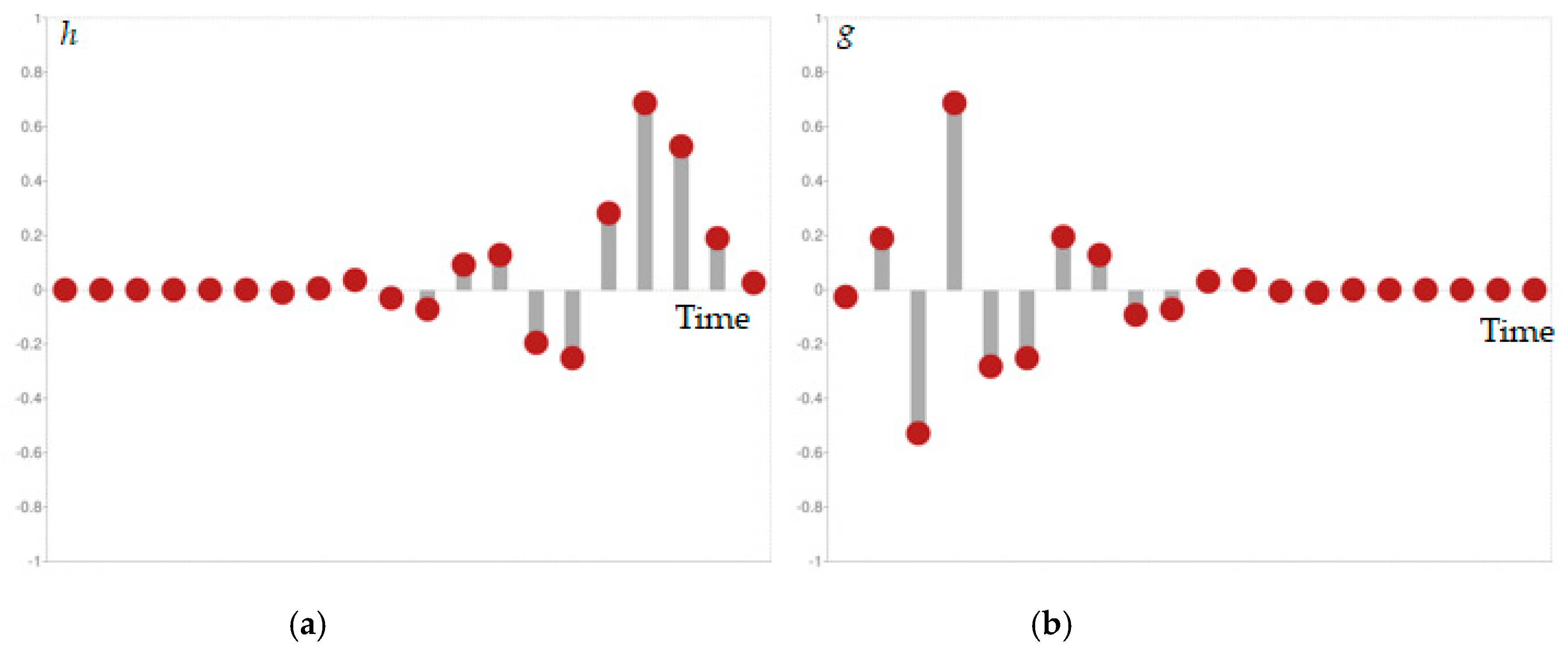
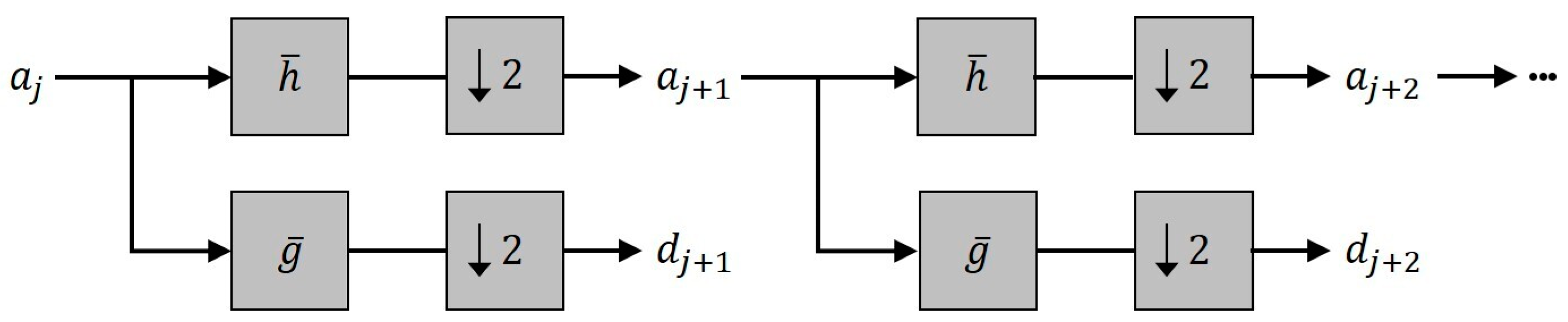
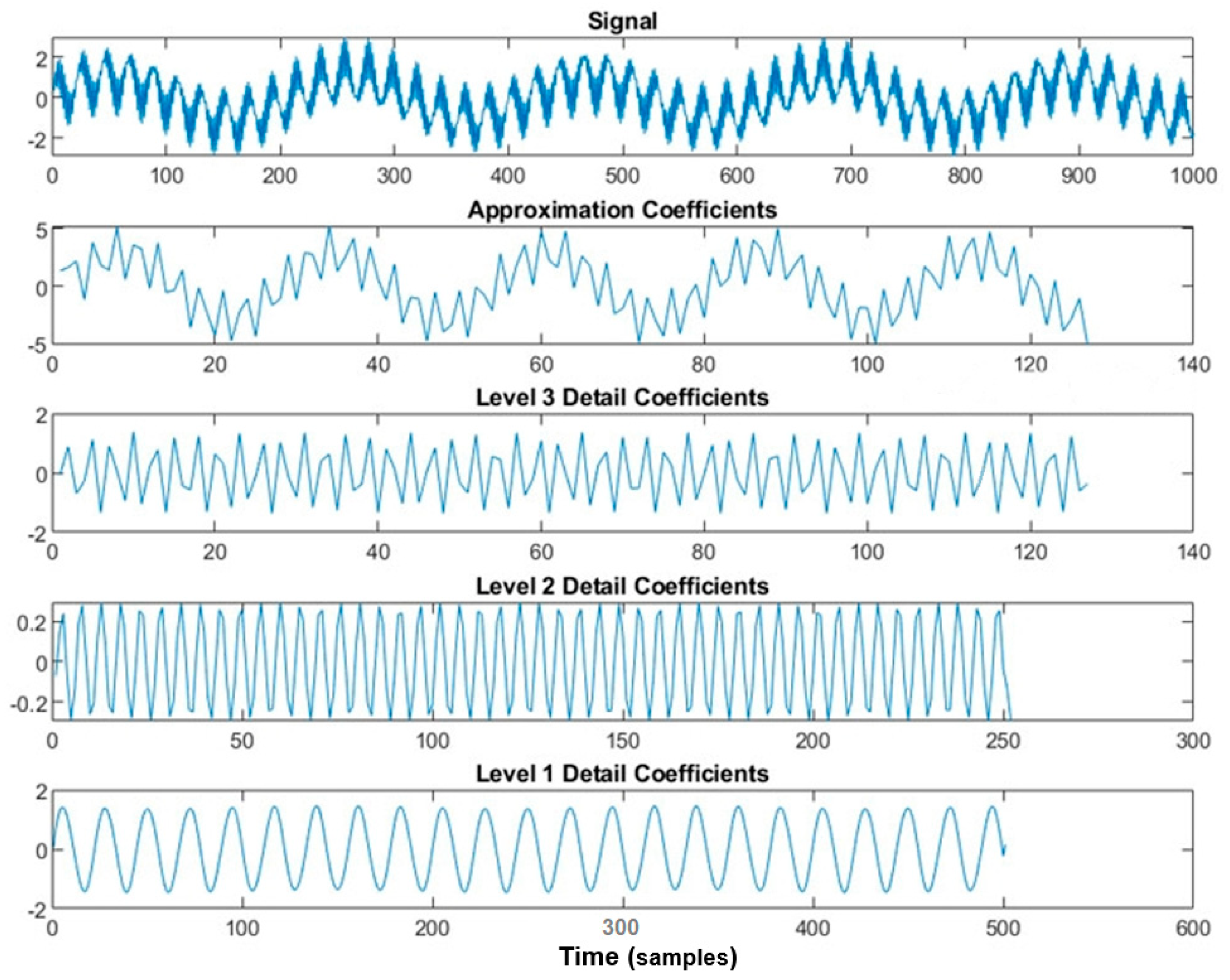
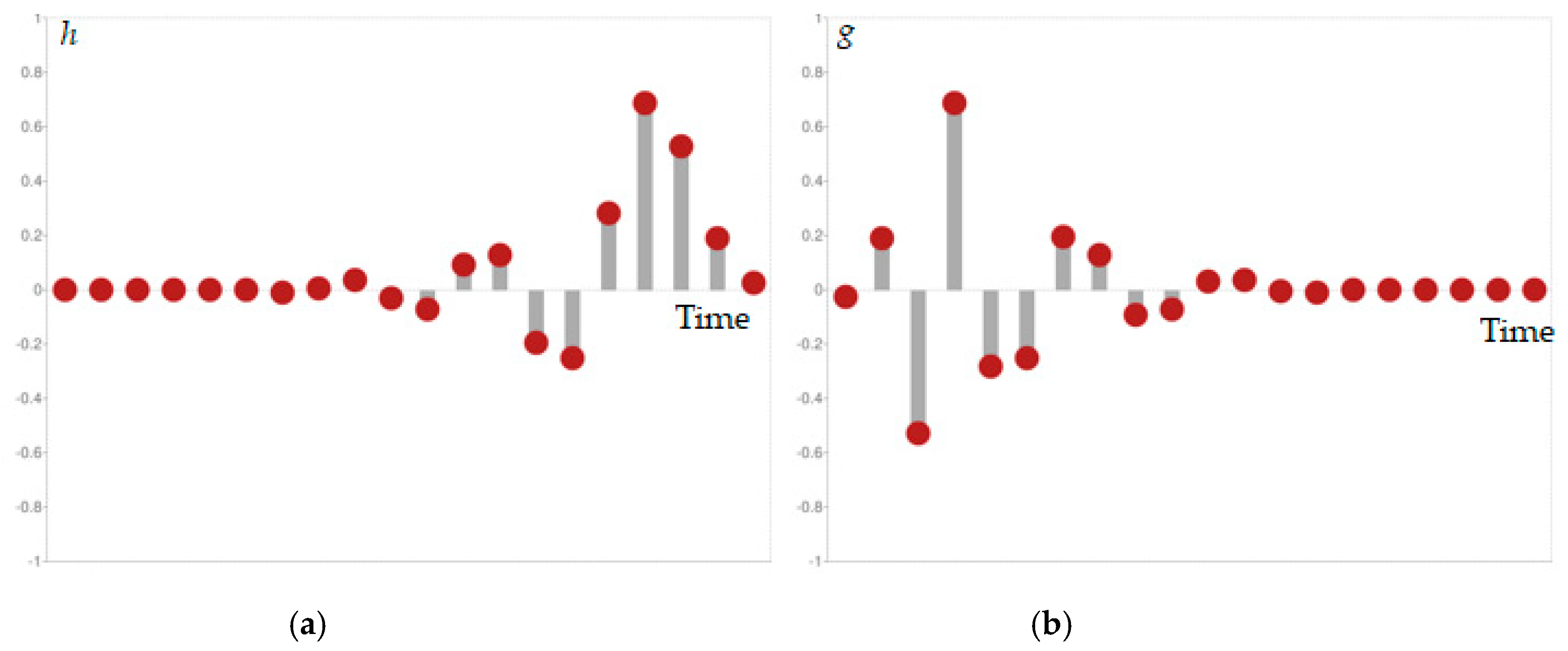
2.2.2. Wavelet Transform and Its Discrete Version
 represents the decimation (down sampling) symbolizing the conservation of one sample out of two.
represents the decimation (down sampling) symbolizing the conservation of one sample out of two.2.2.3. Scalogram of the Received Ultrasound Signal
2.3. From Neurons to CNN and Deep Learning: Basic Concepts
2.3.1. Fundamental Concepts of Neural Networks Used in Our Experiment: A Brief Review
- The combination function: in the initial model, it is simply a weighted sum of the input values.
- The activation function: this is what will determine the output value. It is based on the result of the combination function, as well as on a pre-set threshold. It can, for example, be a simple “staircase function”, which returns 0 if the weighted sum of the inputs is lower than the threshold value, and 1 otherwise.
- Overfitting
- 2.
- Properties of input data
2.3.2. CNN and Deep Learning Principle
- Number of convolution kernels or filters or feature detectors. It’s a power of 2 between and . The use of a large number of filters results in a more powerful model, i.e. it can detect and extract the maximum number of relevant features, but there is a risk of overfitting due to the increase in the number of parameters.
- Filter size. Usually filters are used, but or are also used depending on the application. Keep in mind that these filters are 3D and also have a depth dimension, but since the depth of a filter at a given layer is equal to the depth of its input, it will be omitted.
- Stride controls the overlap of the receptive fields. The smaller the stride, the more the receptive fields overlap and the larger the output volume. This is in fact the sliding step of the filter.
- Zero-padding is sometimes convenient for putting zeros on the edge of the input volume. The size of this zero-padding is the third hyperparameter. This padding allows to control the spatial dimension of the output layer volume.
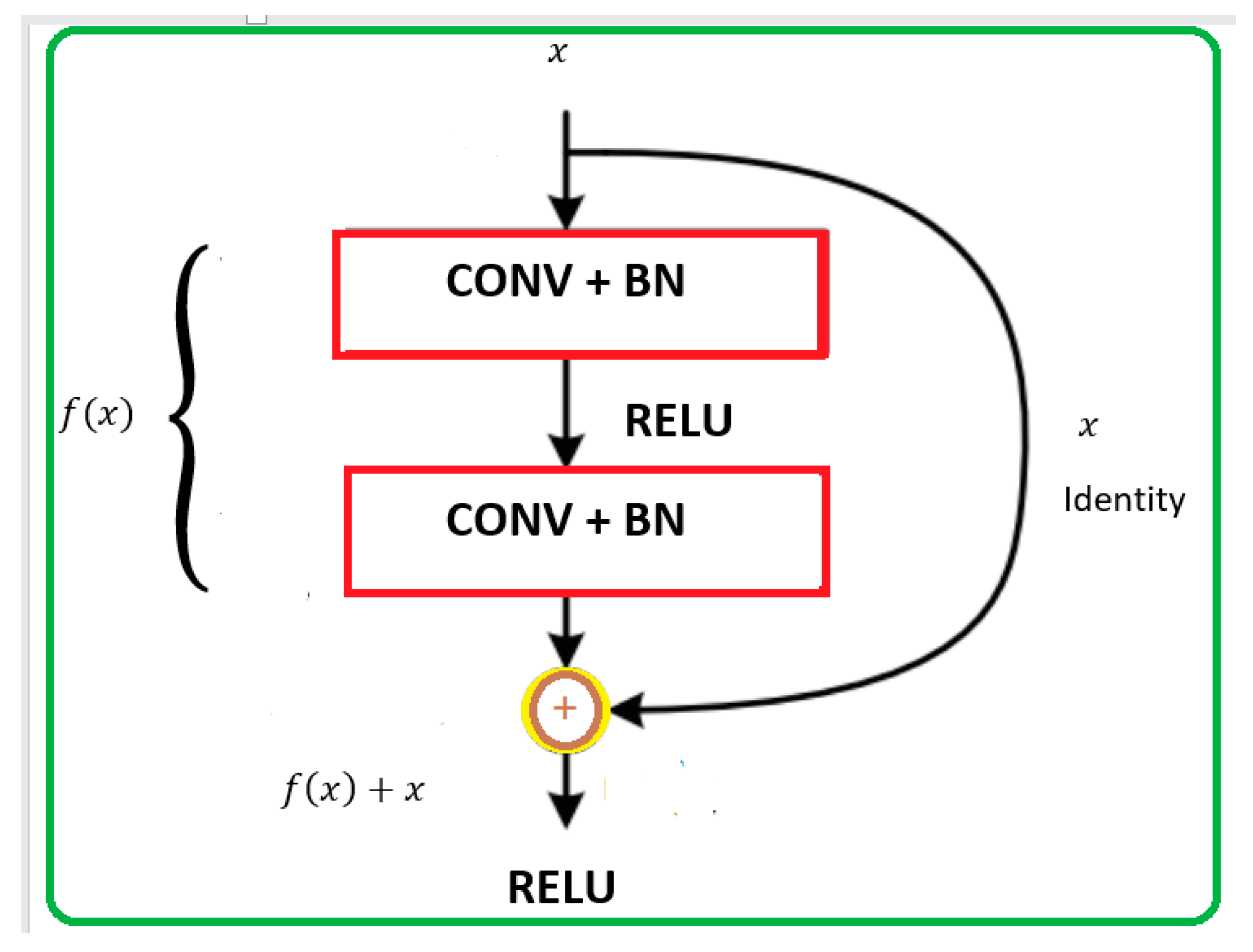
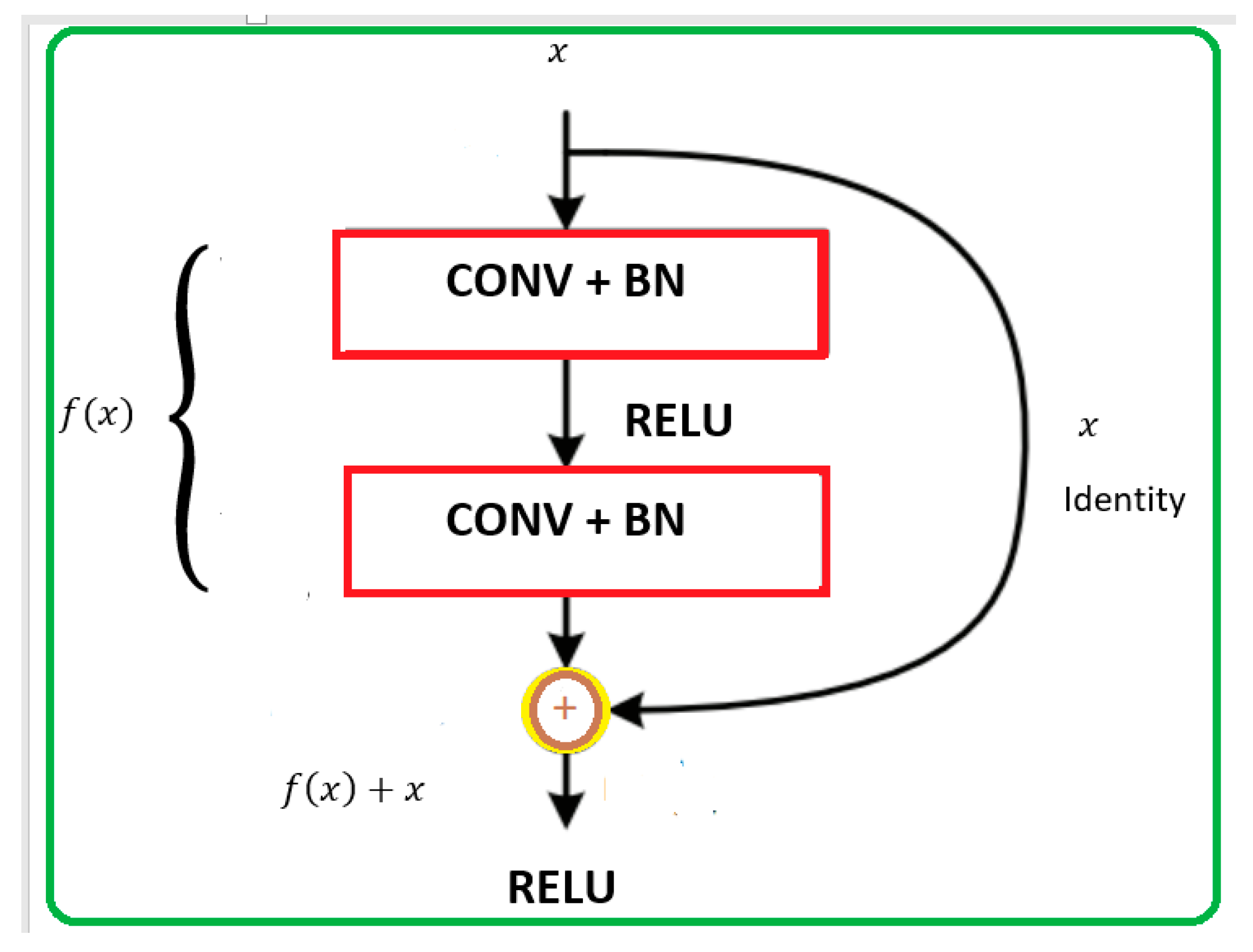
2.3.3. Residual Network Principle
2.3.4. Transfer Learning Concept
3. Results and Discussion
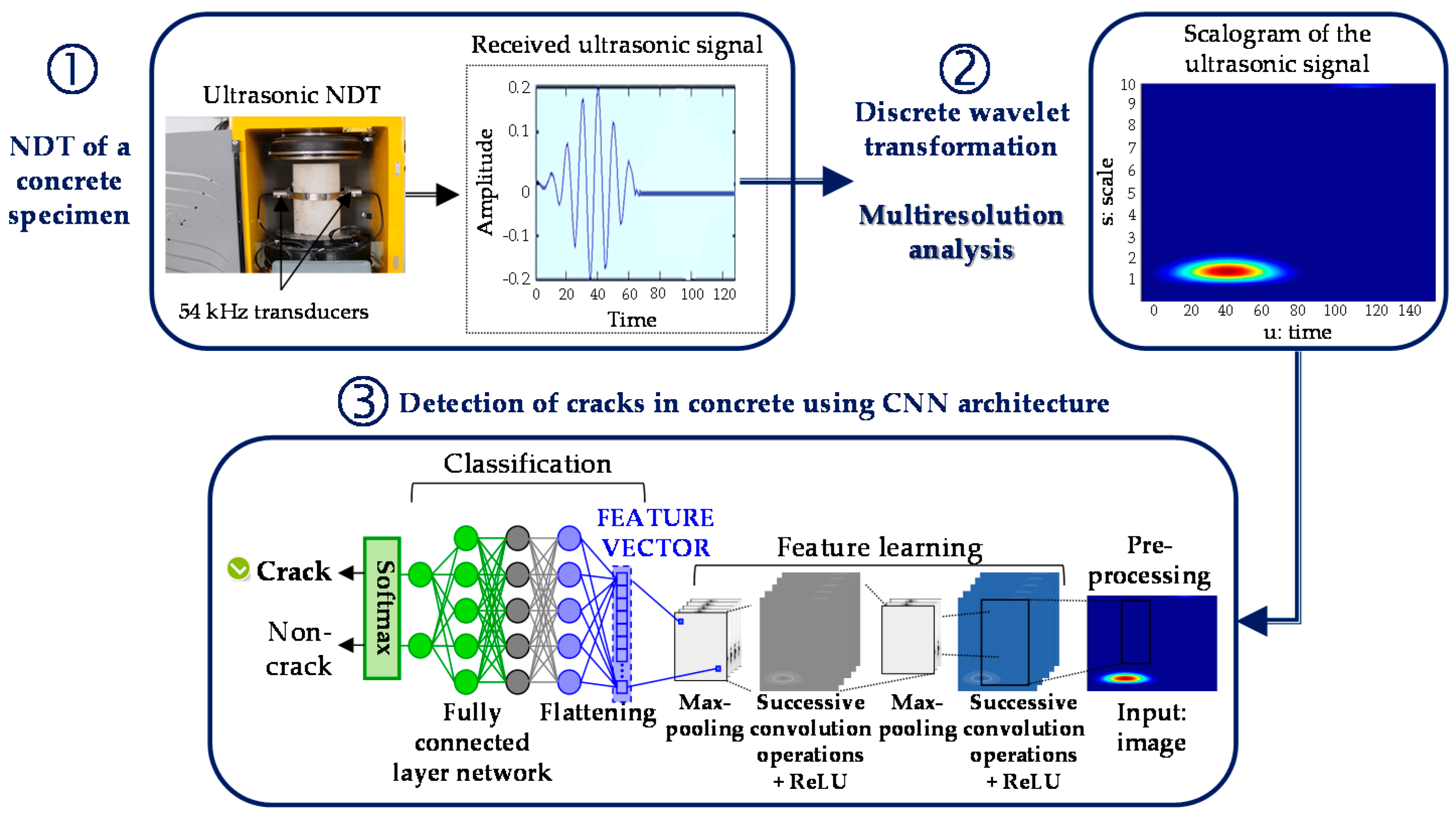
3.1. The Proposed Methodology
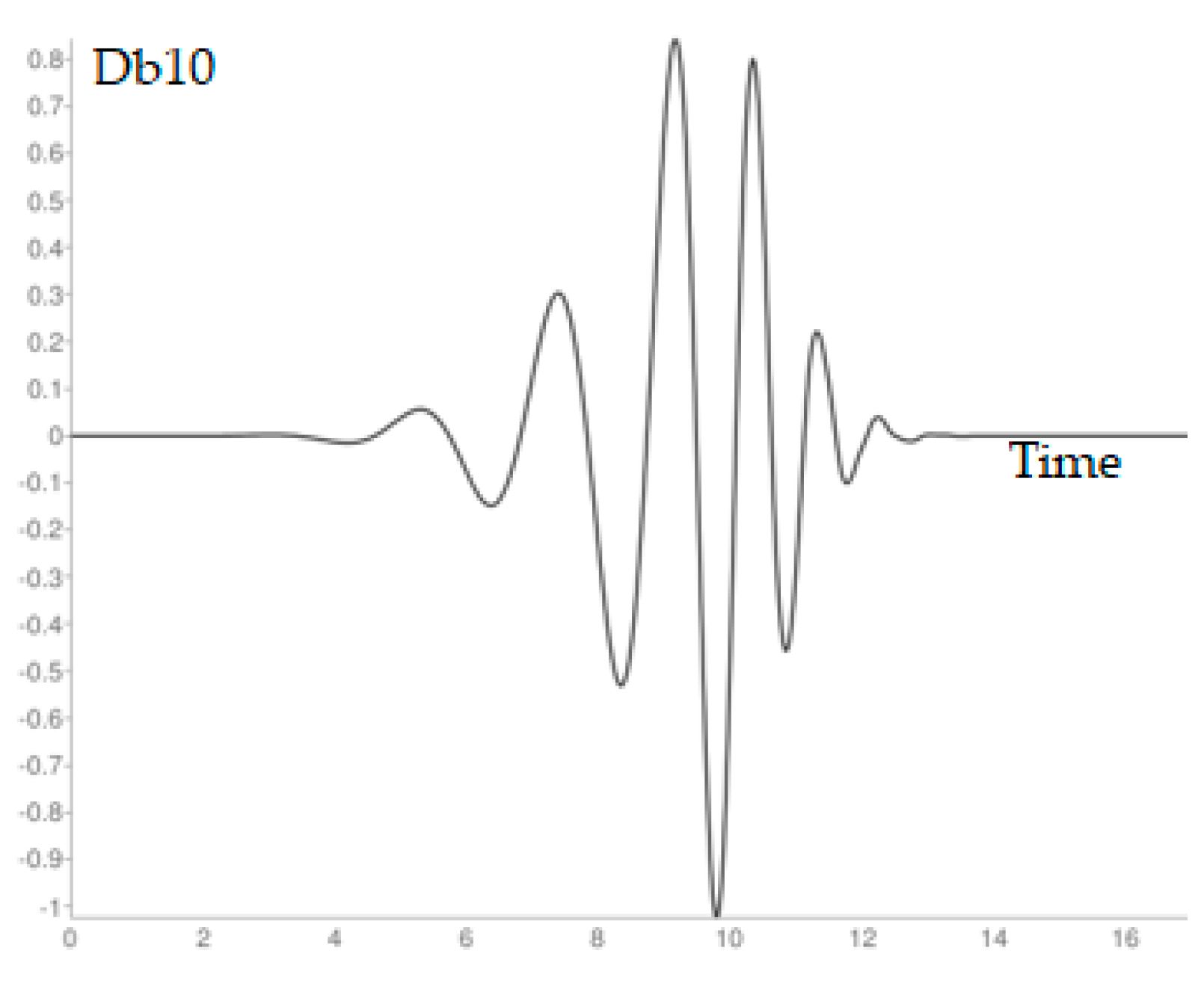
3.2. Wavelet Used for Multiresolution Analysis
3.3. Metrics and Data Used
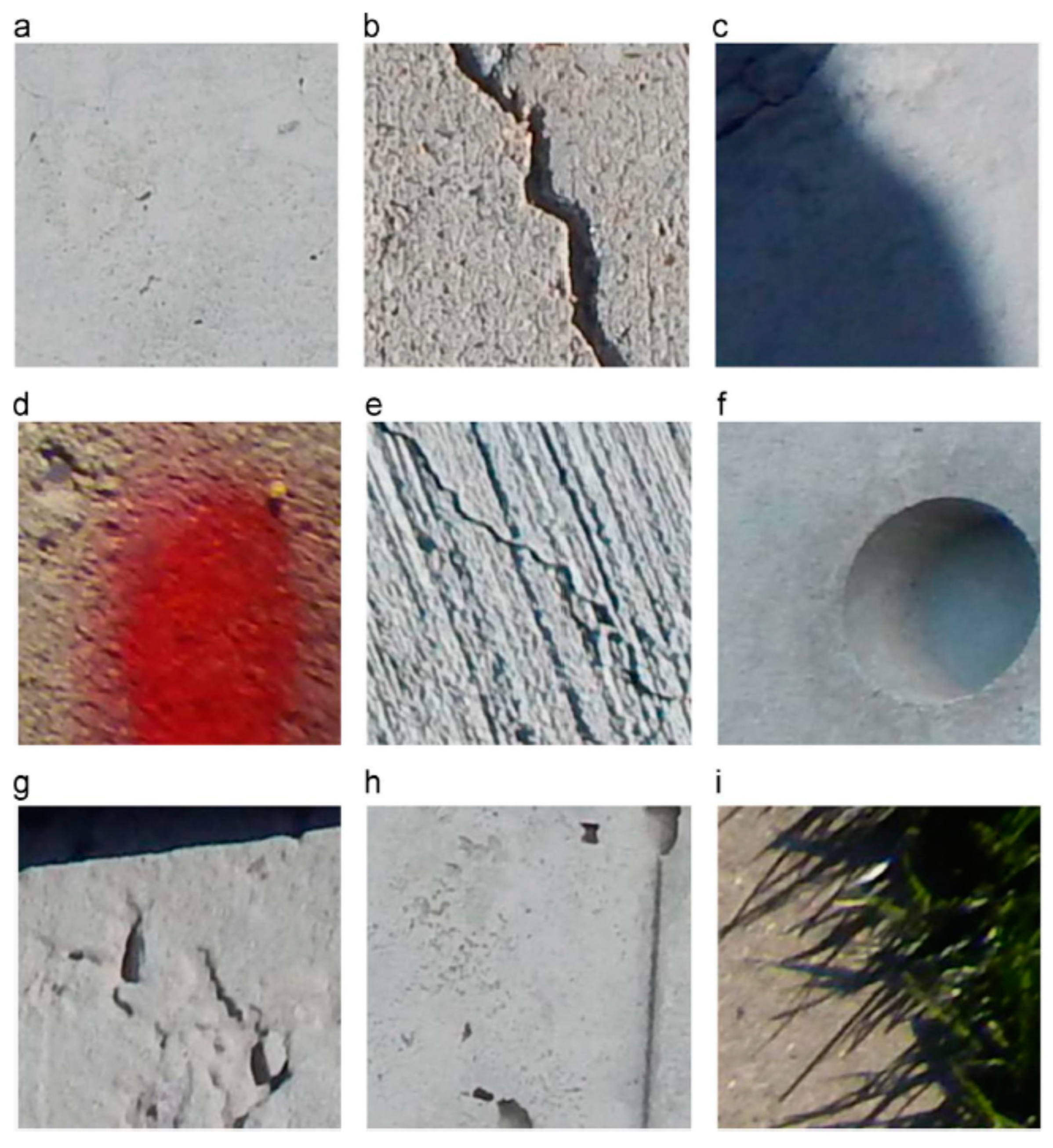
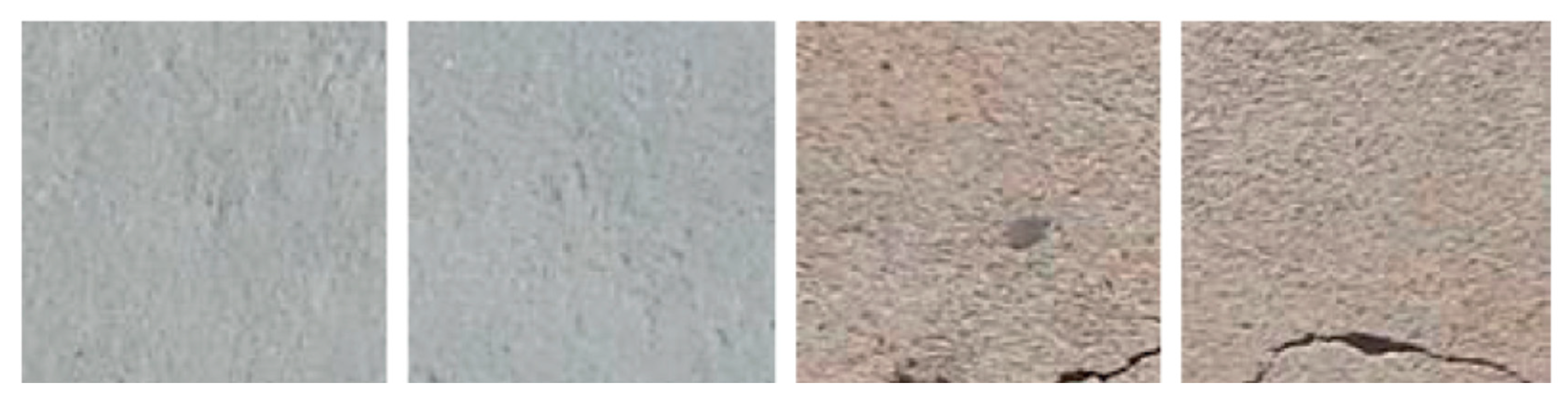
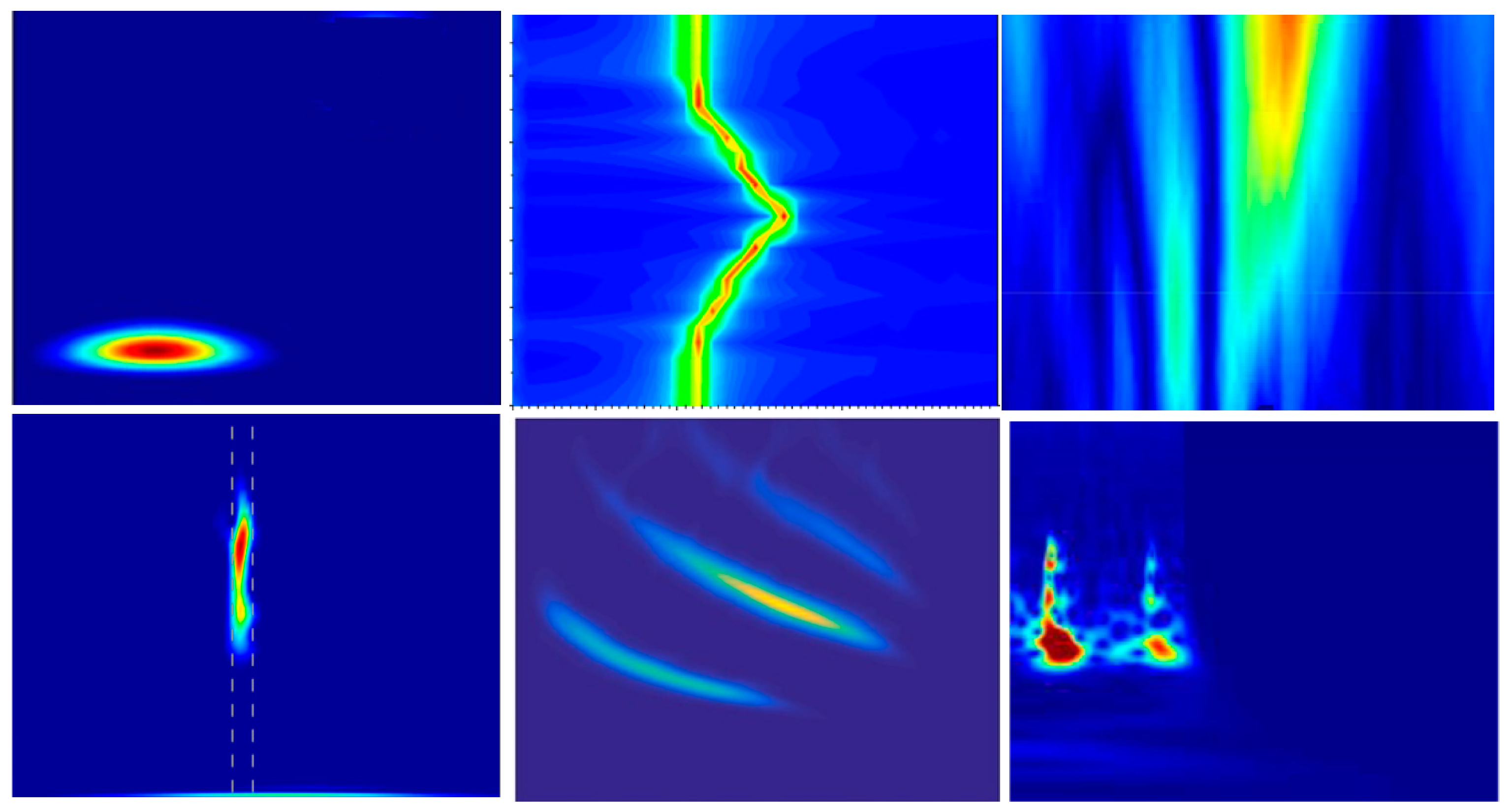
- The first source is derived from ultrasonic non-destructive testing images of internal cracks analyzed by wavelets. The multiresolution images are then classified into cracks/no cracks by deep learning.This original three-step approach is our main contribution.The procedure for obtaining these images is described in Section 3.1. In fact, these images are obtained by multiresolution analysis of the ultrasound signal that passed through the concrete specimen. As shown in Expression (5), it is the square modulus of the wavelet transform or scalogram of the received ultrasound signal.Figure 17 shows some examples of images or scalograms where the defect or crack is represented by a high intensity on the scalogram (yellow-red color).
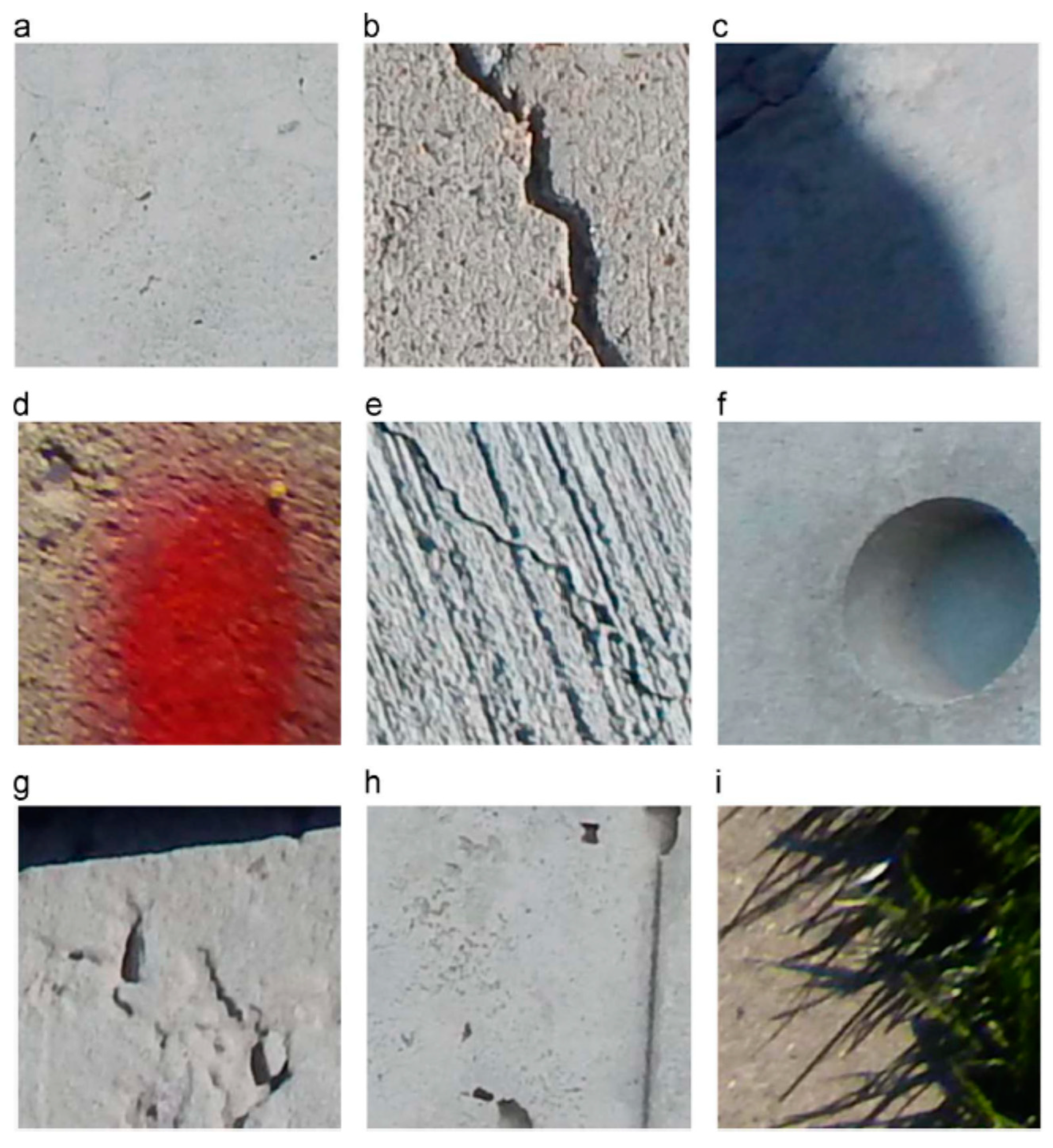
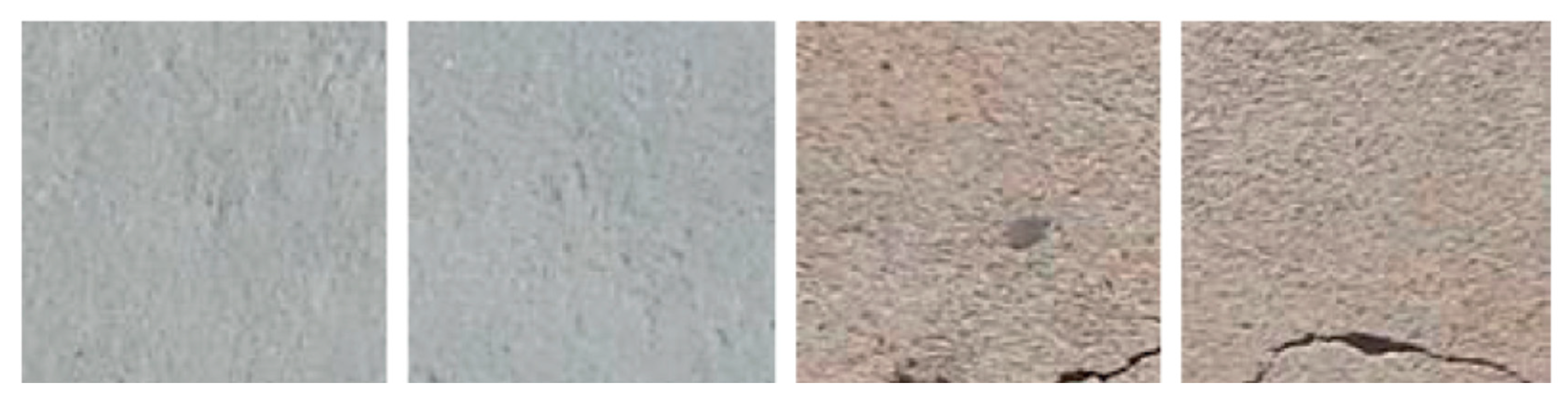
- The second source of images comes from SDNET2018 dataset [56].
3.4. Implementation Aspect and Results Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hassoum, M.N.H.; El-Manaseer, A. Structural Concrete: Theory and Design; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Mehta, P.K.; Monteiro, P.J.M. Concrete: Microstructure, Properties and Materials; McGraw-Hill: New York, NY, USA, 2006. [Google Scholar]
- Mehta, P.K. Durability Critical Issues for the future. Concr. Int. 1997, 9, 27–33. [Google Scholar]
- Bernier, G. Formulation des bétons. Techniques l’ingénieur 2004, C2210v2. [Google Scholar]
- Verma, S.K.; Bhadauria, S.S.; Akhtar, S. Review of Nondestructive Testing Methods for Condition Monitoring of Concrete Structures. J. Constr. Eng. 2013, 2013, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Femmam, S.; M’sirdi, N.K.; Ouahabi, A. Perception and characterization of materials using signal processing techniques. IEEE Trans. Instrum. Meas. 2001, 50, 1203–1211. [Google Scholar] [CrossRef]
- Ouahabi, A. Multifractal analysis for texture characterization: A new approach based on DWT. In Proceedings of the 10th International Conference on Information Science, Signal Processing and Their Applications (ISSPA 2010), Kuala Lumpur, Malaysia, 10–13 May 2010; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2010; pp. 698–703. [Google Scholar]
- Ait Aouit, D.; Ouahabi, A. Monitoring crack growth using thermography. Comptes Rendus Mécanique 2008, 336, 677–683. [Google Scholar] [CrossRef]
- Aouit, D.A.; Ouahabi, A. Nonlinear fracture signal analysis using multifractal approach combined with wavelets. Fractals 2011, 19, 175–183. [Google Scholar] [CrossRef]
- Ouahabi, A. Signal and Image Multiresolution Analysis; ISTE-Wiley: London, UK; Hoboken, NJ, USA, 2013. [Google Scholar]
- Krizhevsky, A.; Hinton, G. Image net classification with deep convolutional neural networks. In Proceedings of the 25th In-ternational Conference on Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; Volume 1, pp. 1097–1105. [Google Scholar]
- Denys, B. Nondestructive evaluation of concrete strength: An historical review and a new perspective by combining NDT methods. Constr. Build. Mater. 2012, 33, 139–163. [Google Scholar]
- Zhu, Y.-K.; Tian, G.-Y.; Lu, R.-S.; Zhang, H. A Review of Optical NDT Technologies. Sensors 2011, 11, 7773–7798. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Girault, J.-M.; Ossant, F.; Ouahabi, A.; Kouame, D.; Patat, F. Time-varying autoregressive spectral estimation for ultrasound attenuation in tissue characterization. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1998, 45, 650–659. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Kang, L.; Yao, S. Research and Application of Acoustic Emission Signal Processing Technology. IEEE Access 2018, 7, 984–993. [Google Scholar] [CrossRef]
- Liao, T.; Ni, J. An automated radiographic NDT system for weld inspection: Part I—Weld extraction. NDT E Int. 1996, 29, 157–162. [Google Scholar] [CrossRef]
- Tang, S.; Ramseyer, C.; Samant, P.; Xiang, L. X-ray-induced acoustic computed tomography of concrete infrastructure. Appl. Phys. Lett. 2018, 112, 63504. [Google Scholar] [CrossRef]
- Zehani, S.; Ouahabi, A.; Oussalah, M.; Mimi, M.; Taleb-Ahmed, A. Trabecular bone microarchitecture characterization based on fractal model in spatial frequency domain imaging. Int. J. Imaging Syst. Technol. 2021, 31, 141–159. [Google Scholar] [CrossRef]
- Chady, T.; Enokizono, M.; Sikora, R. Crack detection and recognition using an eddy current differential probe. IEEE Trans. Magn. 1999, 35, 1849–1852. [Google Scholar] [CrossRef]
- Langenberg, K.; Mayer, K.; Marklein, R. Non-destructive testing of concrete with electromagnetic, acoustic and elastic waves: Modelling and imaging. Non-Destr. Eval. Reinf. Concr. Struct. 2010, 28, 144–162. [Google Scholar] [CrossRef]
- Ouahabi, A.; Depollier, C.; Simon, L.; Koume, D. Spectrum estimation from randomly sampled velocity data [LDV]. IEEE Trans. Instrum. Meas. 1998, 47, 1005–1012. [Google Scholar] [CrossRef]
- Kowalski, R.; Wróblewska, J. Application of a Sclerometer to the Preliminary Assessment of Concrete Quality in Structures after Fire. Arch. Civ. Eng. 2018, 64, 171–186. [Google Scholar] [CrossRef] [Green Version]
- Foudazi, A.; Edwards, C.A.; Ghasr, M.T.; Donnell, K.M. Active Microwave Thermography for Defect Detection of CFRP-Strengthened Cement-Based Materials. IEEE Trans. Instrum. Meas. 2016, 65, 2612–2620. [Google Scholar] [CrossRef]
- Girault, J.; Kouamé, D.; Ouahabi, A.; Patat, F. Estimation of the blood Doppler frequency shift by a time-varying parametric approach. Ultrasonics 2000, 38, 682–687. [Google Scholar] [CrossRef] [Green Version]
- Labat, V.; Remenieras, J.; Matar, O.B.; Ouahabi, A.; Patat, F. Harmonic propagation of finite amplitude sound beams: Experimental determination of the nonlinearity parameter B/A. Ultrasonics 2000, 38, 292–296. [Google Scholar] [CrossRef]
- Ouahabi, Y.; Bensadok, K.; Ouahabi, A. Optimization of the Biomethane Production Process by Anaerobic Digestion of Wheat Straw Using Chemical Pretreatments Coupled with Ultrasonic Disintegration. Sustainability 2021, 13, 7202. [Google Scholar] [CrossRef]
- Sui, K.; Kim, H.-G. Research on application of multimedia image processing technology based on wavelet transform. EURASIP J. Image Video Process. 2019, 2019, 24. [Google Scholar] [CrossRef]
- Haneche, H.; Ouahabi, A.; Boudraa, B. New mobile communication system design for Rayleigh environments based on com-pressed sensing-source coding. IET Commun. 2019, 13, 2375–2385. [Google Scholar] [CrossRef]
- Haneche, H.; Boudraa, B.; Ouahabi, A. A new way to enhance speech signal based on compressed sensing. Measurement 2020, 151, 107117. [Google Scholar] [CrossRef]
- Haneche, H.; Ouahabi, A.; Boudraa, B. Compressed Sensing-Speech Coding Scheme for Mobile Communications. Circuits Syst. Signal Process. 2021, 1–21. [Google Scholar] [CrossRef]
- Djeddi, M.; Ouahabi, A.; Batatia, H.; Basarab, A.; Kouamé, D. Discrete wavelet transform for multifractal texture classification: Application to ultrasound imaging. In Proceedings of the 17th IEEE International Conference on Image Processing (ICIP), Hong Kong, 26–29 September 2010; pp. 637–640. [Google Scholar]
- Guetbi, C.; Kouame, D.; Ouahabi, A.; Remenieras, J. New emboli detection methods [Doppler ultrasound]. In Proceedings of the 1997 IEEE Ultrasonics Symposium Proceedings. An International Symposium (Cat. No.97CH36118), Toronto, ON, Canada, 5–8 October 1997; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2002; pp. 1119–1122. [Google Scholar]
- Calvez, D.; Roqueta, F.; Jacques, S.; Béchou, L.; Ousten, Y.; Ducret, S. Crack Propagation Modeling in Silicon: A Compre-hensive Thermo-Mechanical FEM Approach for Power Devices. IEEE Trans. Compon. Packag. Manuf. Technol. 2014, 4, 360–366. [Google Scholar] [CrossRef]
- Ouahabi, A.; Femmam, S. Wavelet-based multifractal analysis of 1-D and 2-D signals: New results. Analog. Integr. Circuits Signal Process. 2011, 69, 3–15. [Google Scholar] [CrossRef]
- Girault, J.-M.; Kouame, D.; Ouahabi, A. Analytical formulation of the fractal dimension of filtered stochastic signals. Signal Process. 2010, 90, 2690–2697. [Google Scholar] [CrossRef] [Green Version]
- Schneider, K.; Vasilyev, O.V. Wavelet methods in computational fluid dynamics. Annu. Rev. Fluid Mech. 2010, 42, 473–503. [Google Scholar] [CrossRef] [Green Version]
- Arneodo, A.; Bacry, E.; Muzy, J.-F. The thermodynamics of fractals revisited with wavelets. Phys. A Stat. Mech. Its Appl. 1995, 213, 232–275. [Google Scholar] [CrossRef]
- De Moortel, I.; Hood, A.W. Wavelet analysis and the determination of coronal plasma properties. Astron. Astrophys. 2000, 363, 269–278. [Google Scholar]
- Ramsey, J.B. Wavelets in Economics and Finance: Past and Future. Stud. Nonlinear Dyn. Econ. 2002, 6, 3. [Google Scholar] [CrossRef] [Green Version]
- Struzik, Z. Wavelet methods in (financial) time-series processing. Phys. A Stat. Mech. Its Appl. 2001, 296, 307–319. [Google Scholar] [CrossRef] [Green Version]
- Ouahabi, A. A review of wavelet denoising in medical imaging. In Proceedings of the 8th International Workshop on Systems, Signal Processing and Their Applications (IEEE/WoSSPA), Algiers, Algeria, 12–15 May 2013; pp. 19–26. [Google Scholar] [CrossRef]
- Do, M.N.; Vetterli, M. The finite ridgelet transform for image representation. IEEE Trans. Image Process. 2003, 12, 16–28. [Google Scholar] [CrossRef] [Green Version]
- Fadili, J.M.; Starck, J.-L. Curvelets and ridgelets. Encycl. Complex. Syst. Sci. 2009, 3, 1718–1738. [Google Scholar]
- Ahmed, S.S.; Messali, Z.; Ouahabi, A.; Trepout, S.; Messaoudi, C.; Marco, S. Nonparametric Denoising Methods Based on Contourlet Transform with Sharp Frequency Localization: Application to Low Exposure Time Electron Microscopy Images. Entropy 2015, 17, 3461–3478. [Google Scholar] [CrossRef] [Green Version]
- Ferroukhi, M.; Ouahabi, A.; Attari, M.; Habchi, Y.; Taleb-Ahmed, A. Medical Video Coding Based on 2nd-Generation Wavelets: Performance Evaluation. Electronics 2019, 8, 88. [Google Scholar] [CrossRef] [Green Version]
- Shen, X.; Tian, X.; Liu, T.; Xu, F.; Tao, D. Continuous Dropout. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 3926–3937. [Google Scholar] [CrossRef]
- Ouahabi, A.; Taleb-Ahmed, A. Deep learning for real-time semantic segmentation: Application in ultrasound imaging. Pattern Recognit. Lett. 2021, 144, 27–34. [Google Scholar] [CrossRef]
- Ilboudo, W.E.L.; Kobayashi, T.; Sugimoto, K. Robust Stochastic Gradient Descent With Student-t Distribution Based First-Order Momentum. IEEE Trans. Neural Netw. Learn. Syst. 2020, 1–14. [Google Scholar] [CrossRef]
- Adjabi, I.; Ouahabi, A.; Benzaoui, A.; Taleb-Ahmed, A. Past, present, and future of face recognition: A Review. Electronics 2020, 9, 1188. [Google Scholar] [CrossRef]
- Adjabi, I.; Ouahabi, A.; Benzaoui, A.; Jacques, S. Multi-block color-binarized statistical images for single-sample face recognition. Sensors 2021, 21, 728. [Google Scholar] [CrossRef]
- Khaldi, Y.; Benzaoui, A.; Ouahabi, A.; Jacques, S.; Taleb-Ahmed, A. Ear recognition based on Deep Unsupervised Active Learning. IEEE Sens. J. 2021. accepted. [Google Scholar]
- Cha, Y.; Choi, W.; Büyüköztürk, O. Deep Learning-based crack damage detection using Convolutional Neural Networks. Comput. Aided Civil Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Yamashita, R.; Nishio, M.; Do, R.K.G.; Togashi, K. Convolutional neural networks: An overview and application in radiology. Insights Imaging 2018, 9, 611–629. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef] [Green Version]
- Jia, Y.; Shelhamer, E.; Donahue, J.; Karayev, S.; Long, J.; Girshick, R.; Guadarrama, S.; Darrell, T. Caffe: Convolutional Architecture for Fast Feature Embedding. arXiv 2014, arXiv:1408.5093. [Google Scholar]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. SDNET2018: An annotated image dataset for non-contact concrete crack detection using deep convolutional neural networks. Data Brief 2018, 21, 1664–1668. [Google Scholar] [CrossRef] [PubMed]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Frequency | Wavelength | Maximum Grain Size | Bandwidth | Pulse Shape | Weight |
|---|---|---|---|---|---|---|
| P-wave transducer | 54 kHz ± 5 kHz | 68.5 mm | 34 mm | <10 kHz | Square wave | 287 g |
| Model | Accuracy | Precision | Recall | F1 |
|---|---|---|---|---|
| AlexNet | 0.8855 | 0.8921 | 0.8840 | 0.8881 |
| ResNet50 | 0.9068 | 0.9178 | 0.9091 | 0.9099 |
| Model | Accuracy | Precision | Recall | F1 |
|---|---|---|---|---|
| AlexNet | 0.9182 | 0.9322 | 0.9241 | 0.9284 |
| ResNet50 | 0.9691 | 0.9691 | 0.9704 | 0.9798 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arbaoui, A.; Ouahabi, A.; Jacques, S.; Hamiane, M. Concrete Cracks Detection and Monitoring Using Deep Learning-Based Multiresolution Analysis. Electronics 2021, 10, 1772. https://doi.org/10.3390/electronics10151772
Arbaoui A, Ouahabi A, Jacques S, Hamiane M. Concrete Cracks Detection and Monitoring Using Deep Learning-Based Multiresolution Analysis. Electronics. 2021; 10(15):1772. https://doi.org/10.3390/electronics10151772
Chicago/Turabian StyleArbaoui, Ahcene, Abdeldjalil Ouahabi, Sébastien Jacques, and Madina Hamiane. 2021. "Concrete Cracks Detection and Monitoring Using Deep Learning-Based Multiresolution Analysis" Electronics 10, no. 15: 1772. https://doi.org/10.3390/electronics10151772