
A Wideband Radio Channel Sounder for Non-Stationary Channels: Design, Implementation and Testing



Abstract
:1. Introduction
- Impulse-train. The simplest idea for a wideband channel sounder, it consists in transmitting a very short pulse emulating a delta. At the receiver, the channel impulse response is directly obtained. This system is extremely sensitive to noise and interference. The other main drawback is that very short, high-energy pulses are hard to generate. Examples of this technique include [4,5].
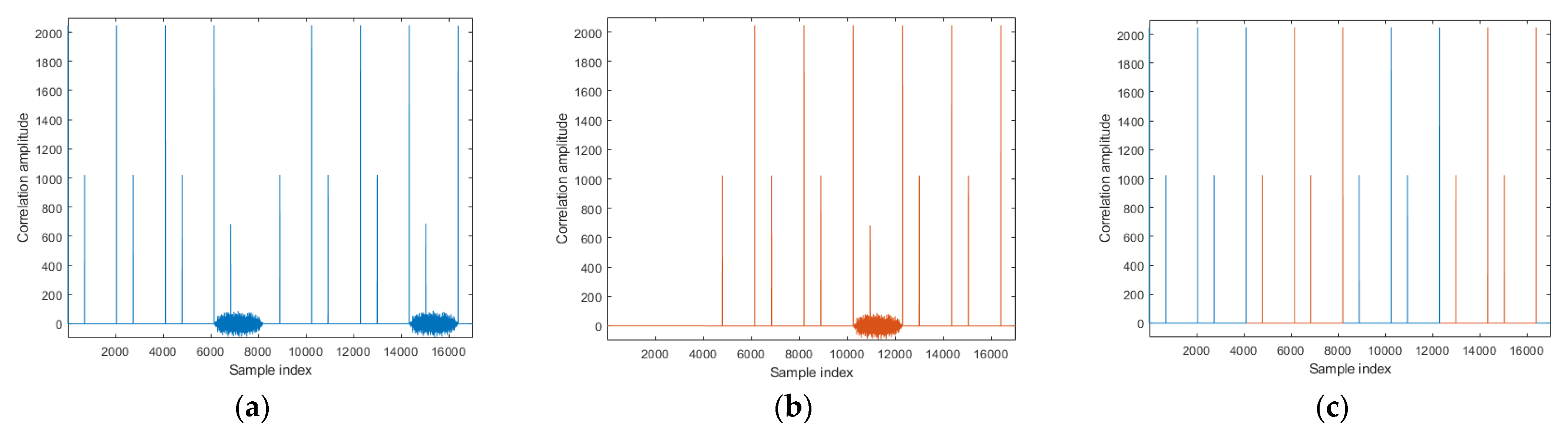
- Swept time delay cross-correlation (STDCC). Based on the pulse-compression principle, it transmits a pseudorandom sequence. As the autocorrelation of such waveforms is a delta, the CIR is obtained by correlating the received signal with a copy of the transmitted one. Nonetheless, as a correlation requires the evaluation of all possible delay combinations between both sequences, STDCC sounders employ a slightly slower clock at reception. This way, one sequence slides over the other. Due to the pulse compression, a processing gain is achieved, enhancing dynamic range over the impulse-train sounder. Since the first use of this technique by Cox [6], it has been extensively employed in measurement campaigns [7,8,9,10,11,12]. This is due to the high bandwidth, dynamic range, and relative simplicity of these sounders. However, these sounders have a reduced channel sampling rate that limits the maximum tolerable Doppler shift.
- Convolution matched filter (CMF). Another way of implementing pulse compression, the matched filter provides a mean to compute correlation. Classic sounders of this type use surface acoustic wave (SAW) filters [13,14]. This allows operation in real time by eliminating the penalty on the channel-sampling rate imposed by STDCC. Nonetheless, SAW filters are hard to manufacture if the sequences are long. Implementing the filter in the digital domain instead is also impractical in these cases, at least to obtain real-time results.
- Offline correlation. In this case, the receiver samples and records the sounding signal. Correlation is then calculated offline. This method allows for an increase of the channel-sampling rate. However, this approach is demanding in terms of data storage speed and capacity. Often, expensive equipment, such as high-speed oscilloscopes, are used. Examples of this category include [15,16,17,18].
- Pulse compression-based sounders, which rely on chirp pulses to achieve bandwidth compression at baseband, may achieve faster probing rates [19].
- Frequency swept. In these sounders, the frequency of a tone is swept over the bandwidth of interest to directly obtain the frequency-transfer function of the channel. Usually, a vector network analyzer (VNA) is used to measure the scattering parameter S21 between transmission and reception. CIRs can be obtained by applying the inverse Fourier transform to the frequency response. Narrow sliding filters allow to achieve a great dynamic range. Nevertheless, the transmitter and receiver have to be directly connected and the slow swept requires the channel to remain stationary for a long time. Thereby, VNA-based sounders are typically used indoors and over short distances. As in the STDCC case, these sounders have been widely used [20,21,22,23].
- Multi-tone sounders. These sounders estimate the frequency response of the channel by transmitting a multi-tone signal like the one resulting from orthogonal frequency division multiplexing (OFDM). These kind of sounders operate quickly, and as such, many responses can be obtained per second [24]. Nonetheless, high sampling rates are required.
2. Channel Sounder Design and Measurement Scenarios
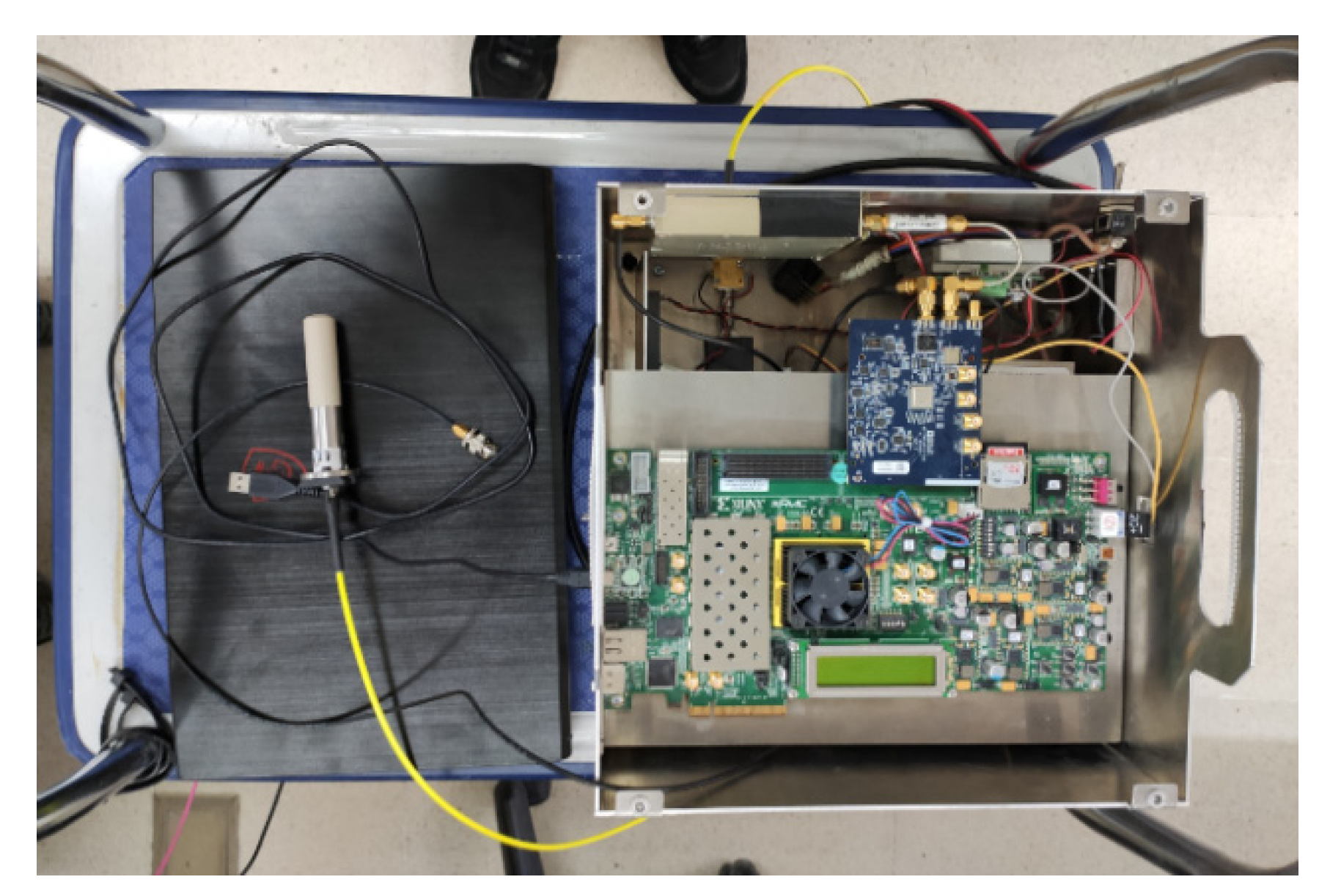
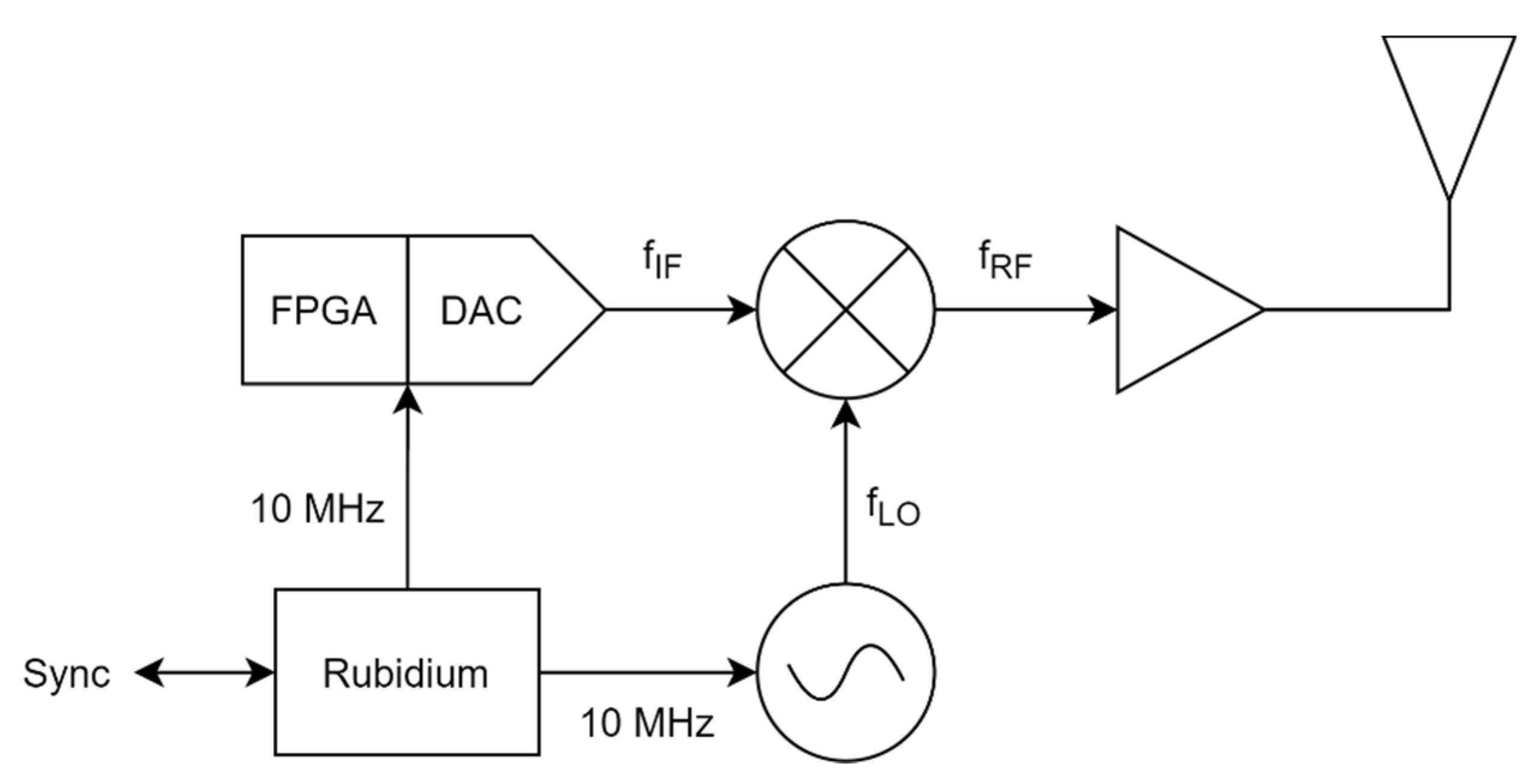
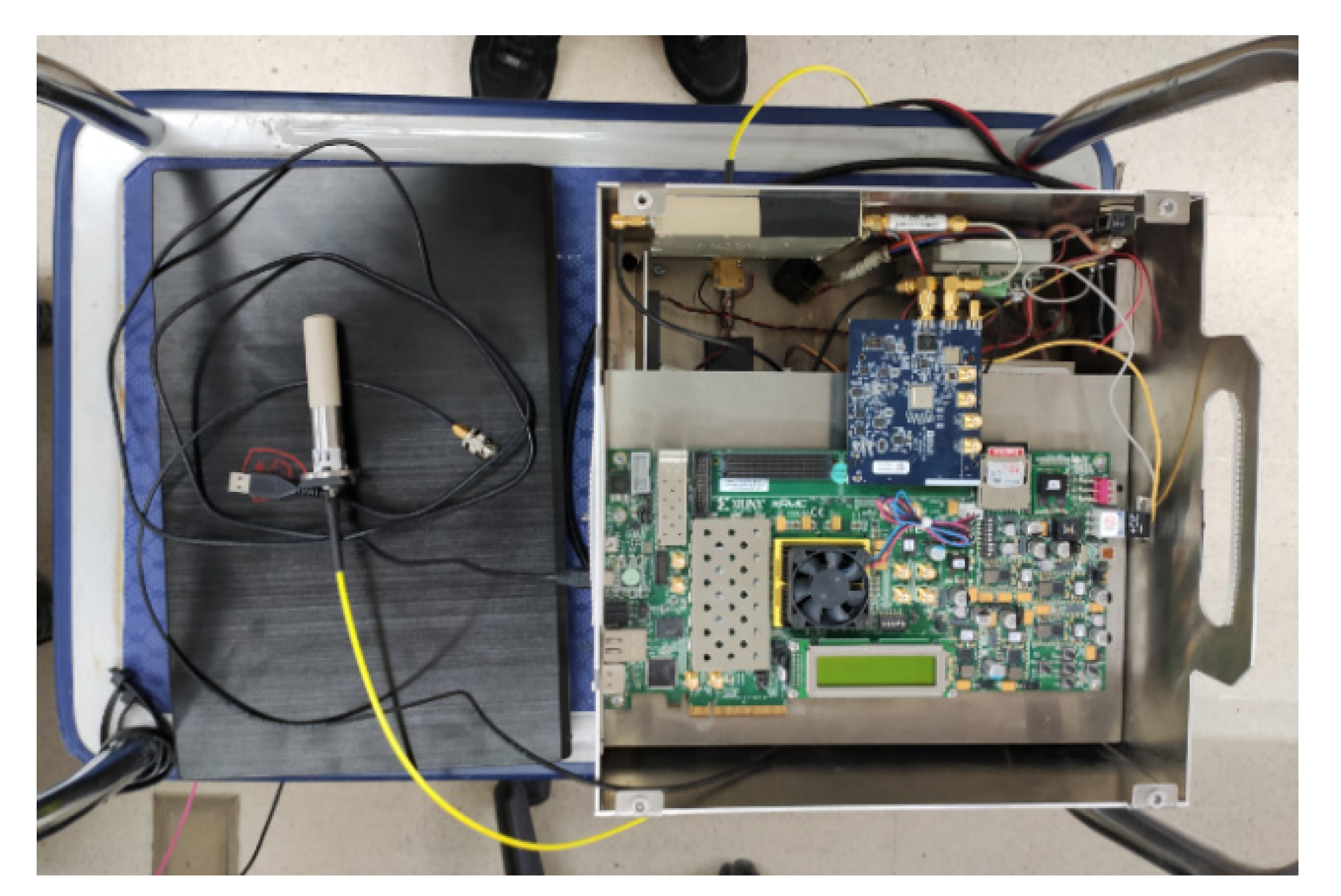
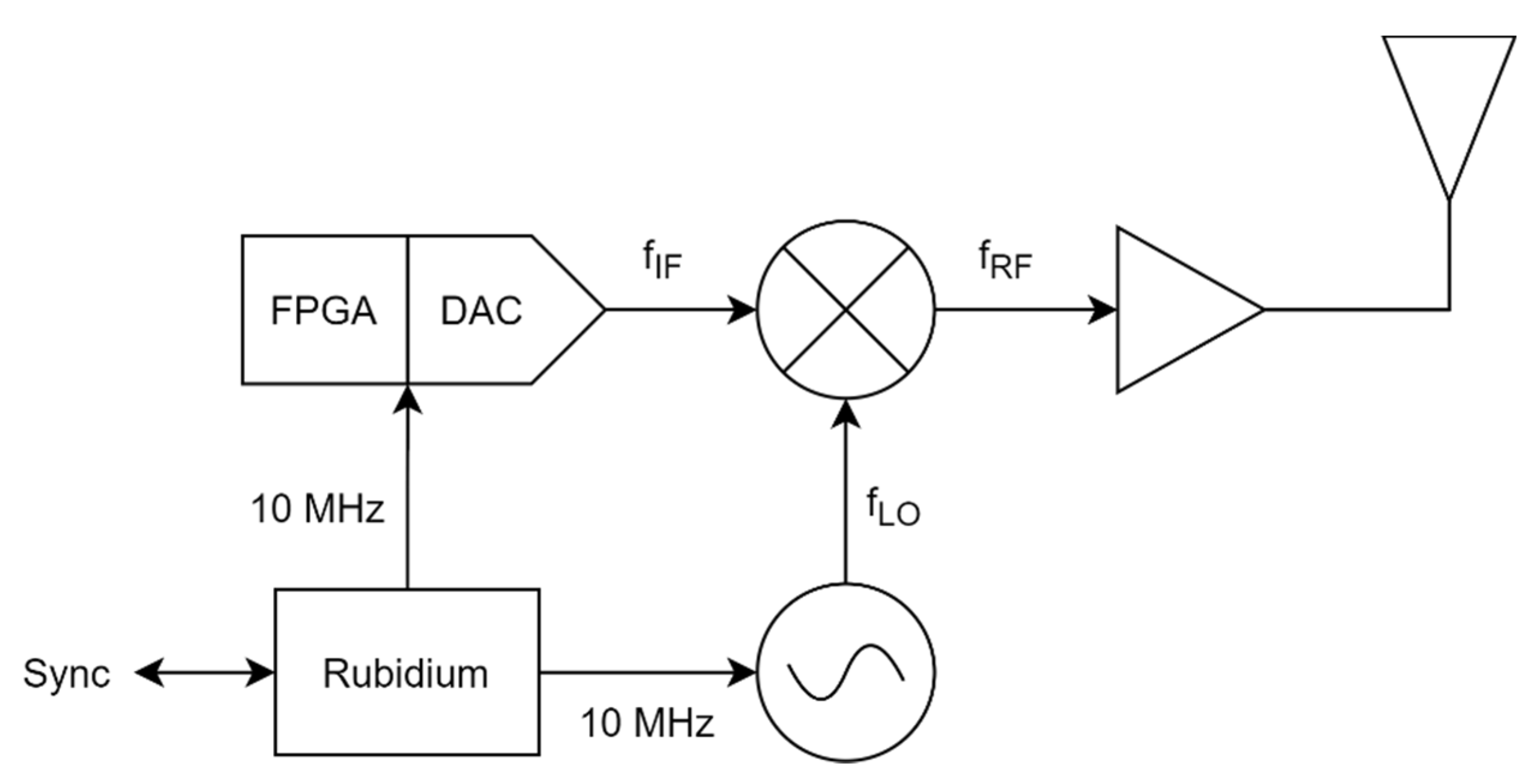
2.1. Transmitter
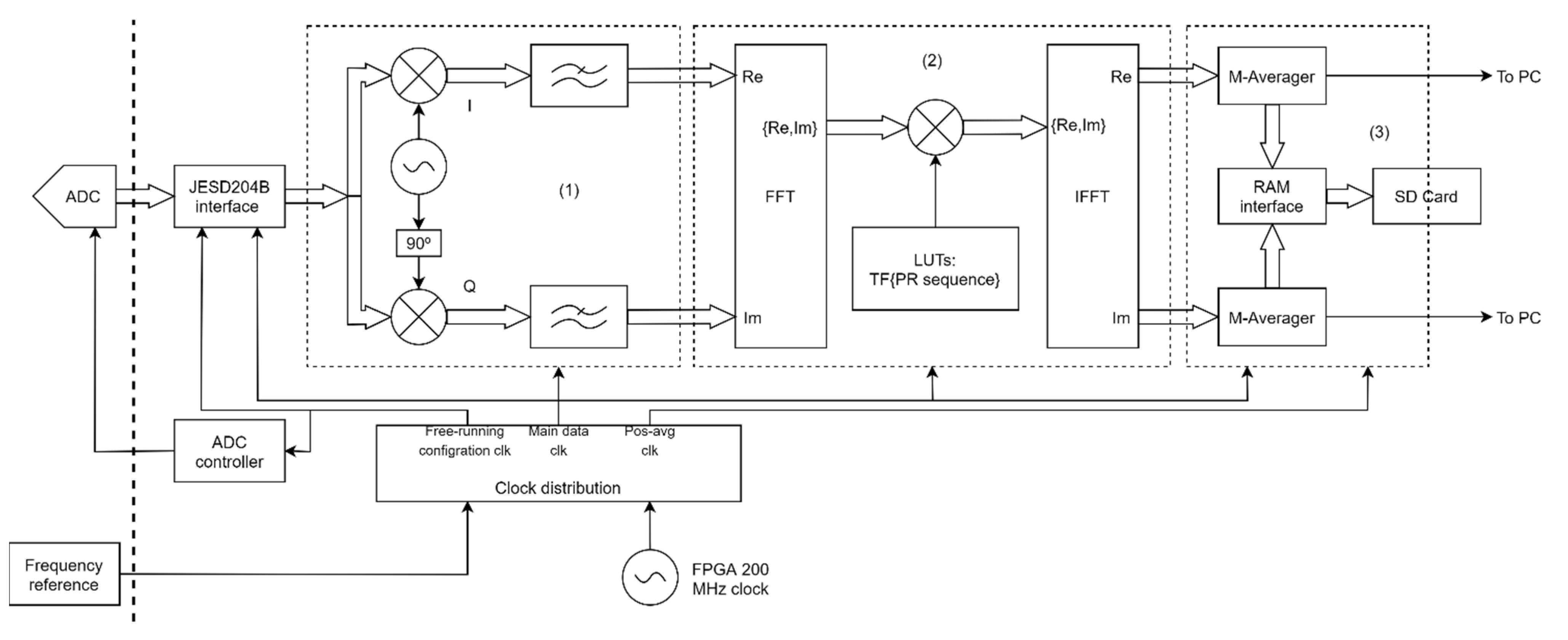
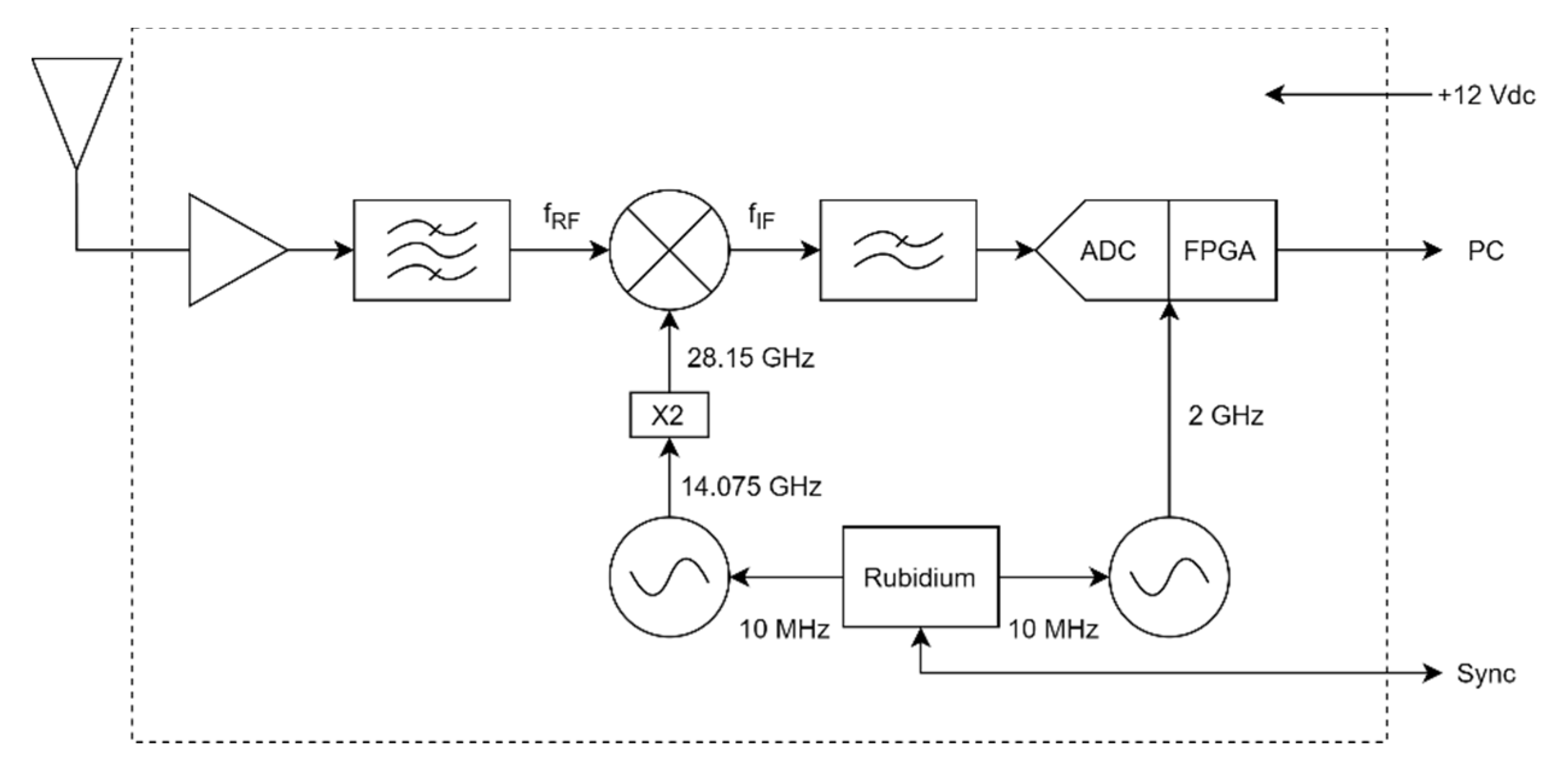
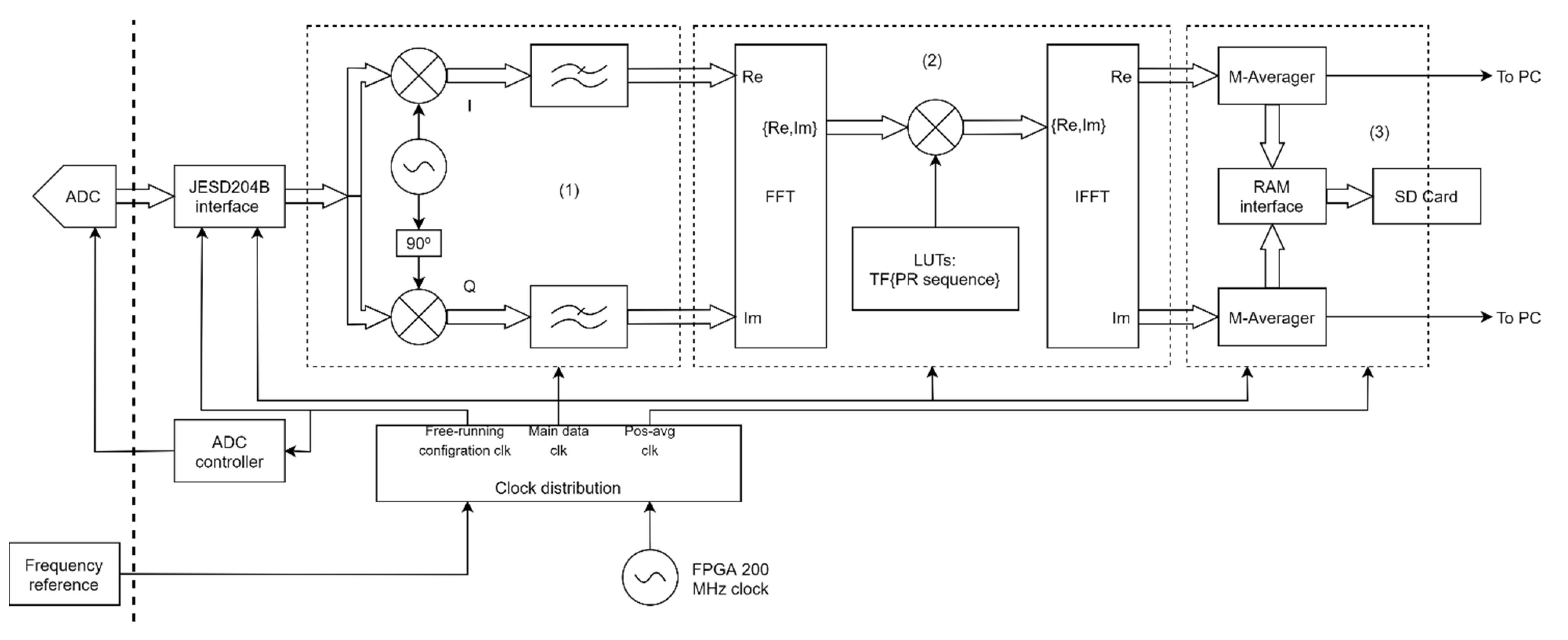
2.2. Receiver
2.3. Sounder Configuration and Parameters
2.4. Campaign Settings
2.4.1. Laboratory Setup
2.4.2. Low-Speed Setup
2.4.3. Highway Setup
3. Results
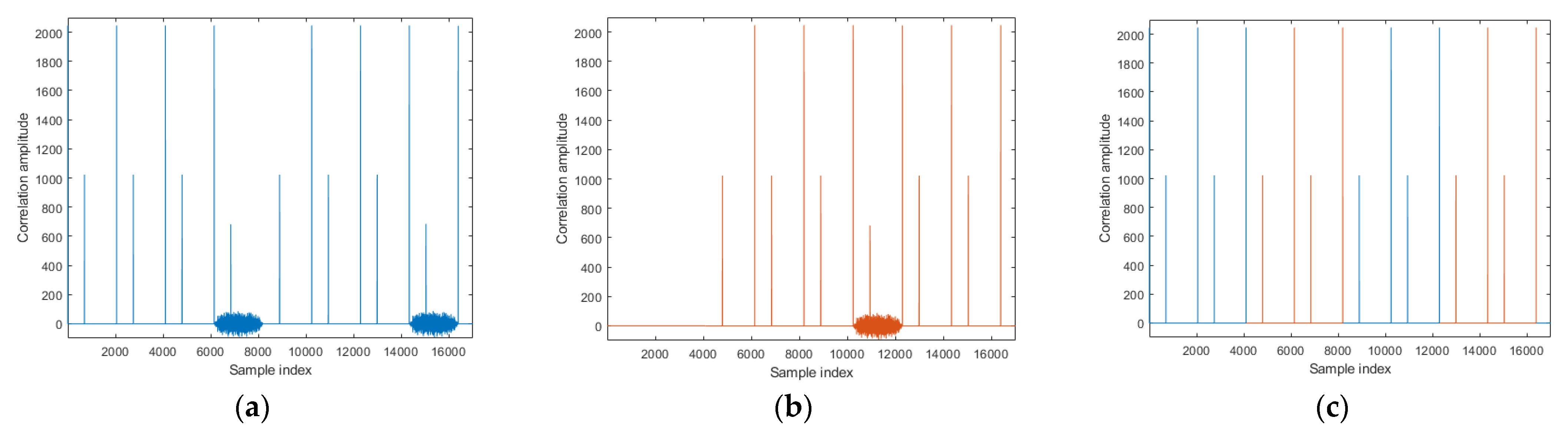
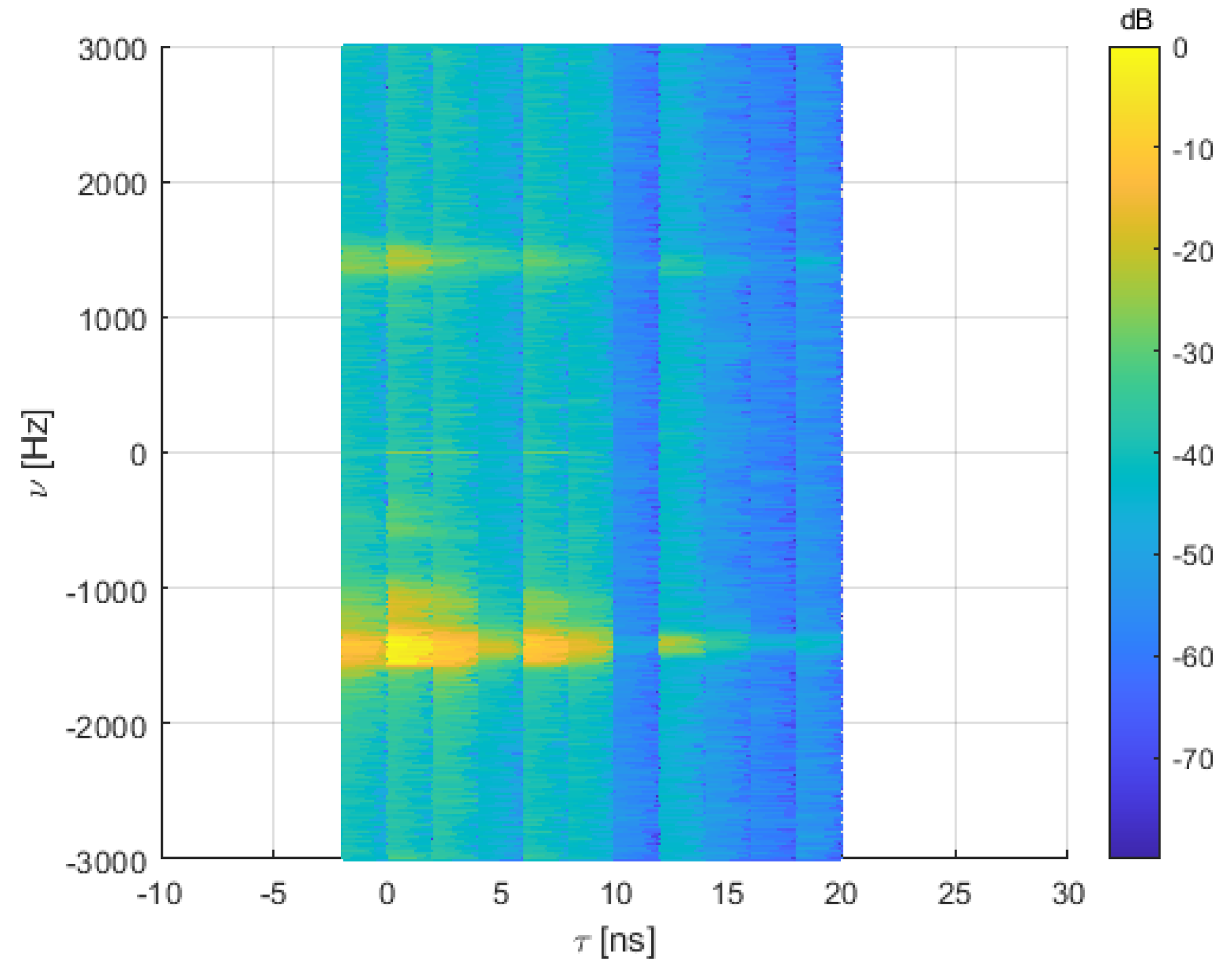
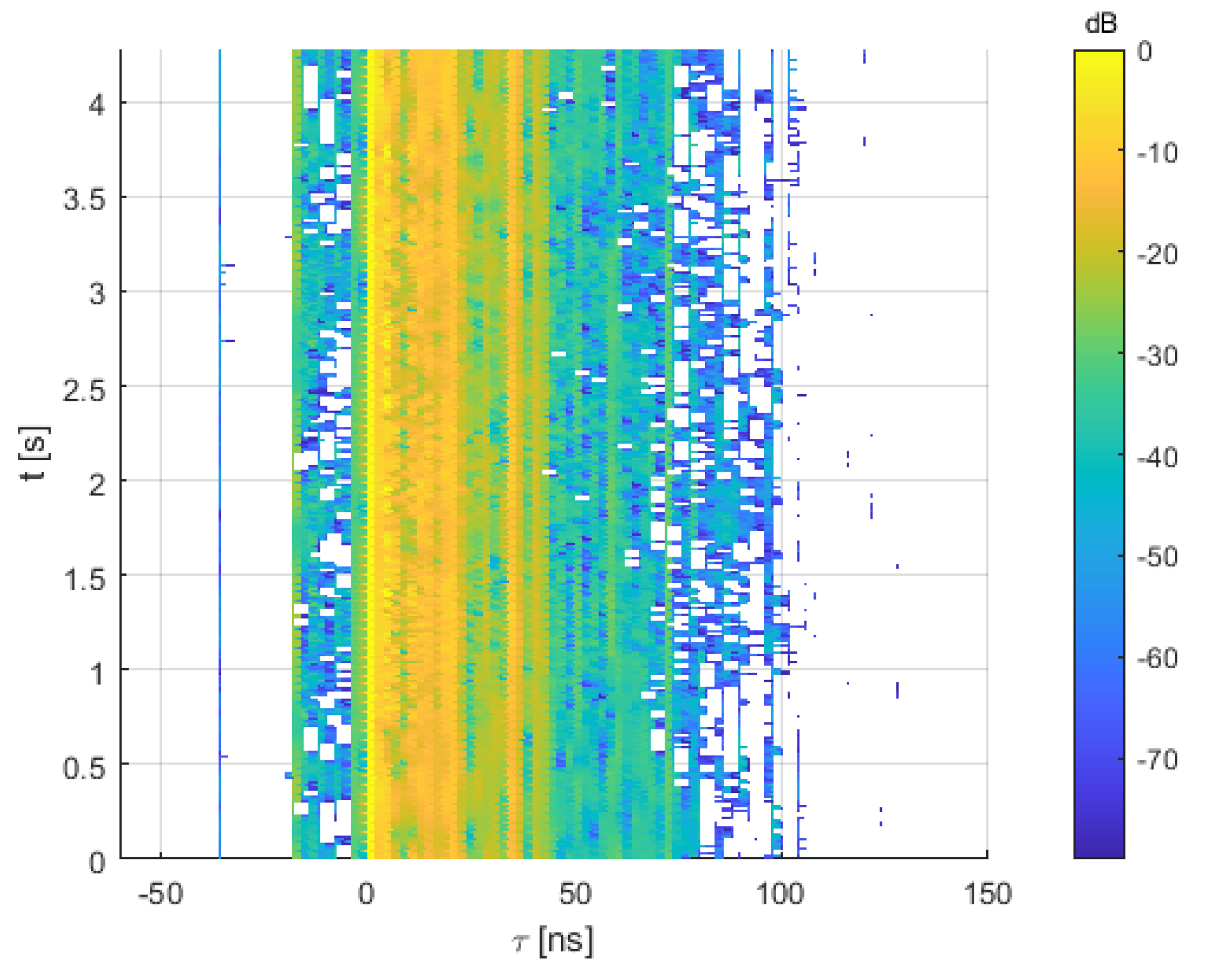
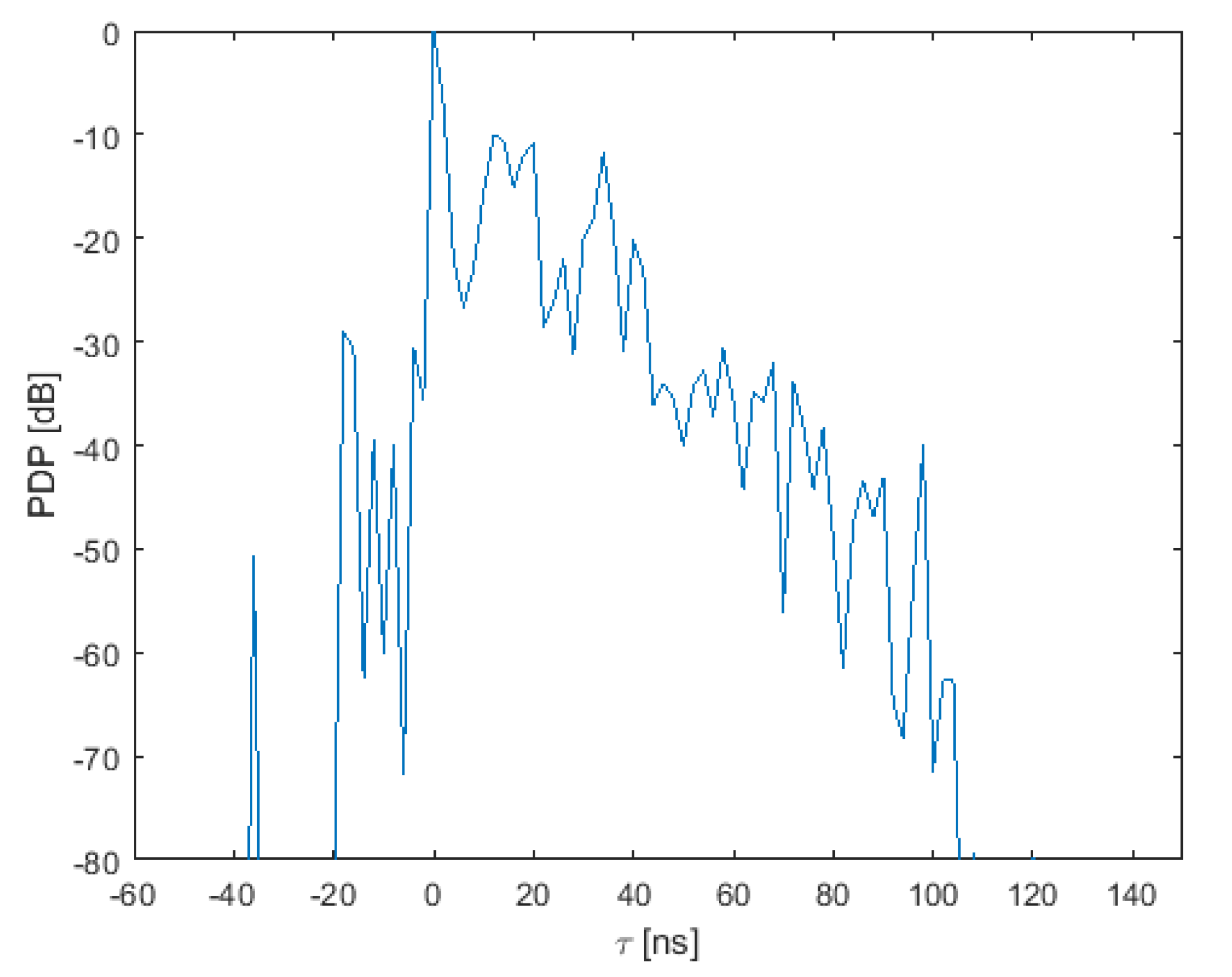
3.1. Laboratory Tests
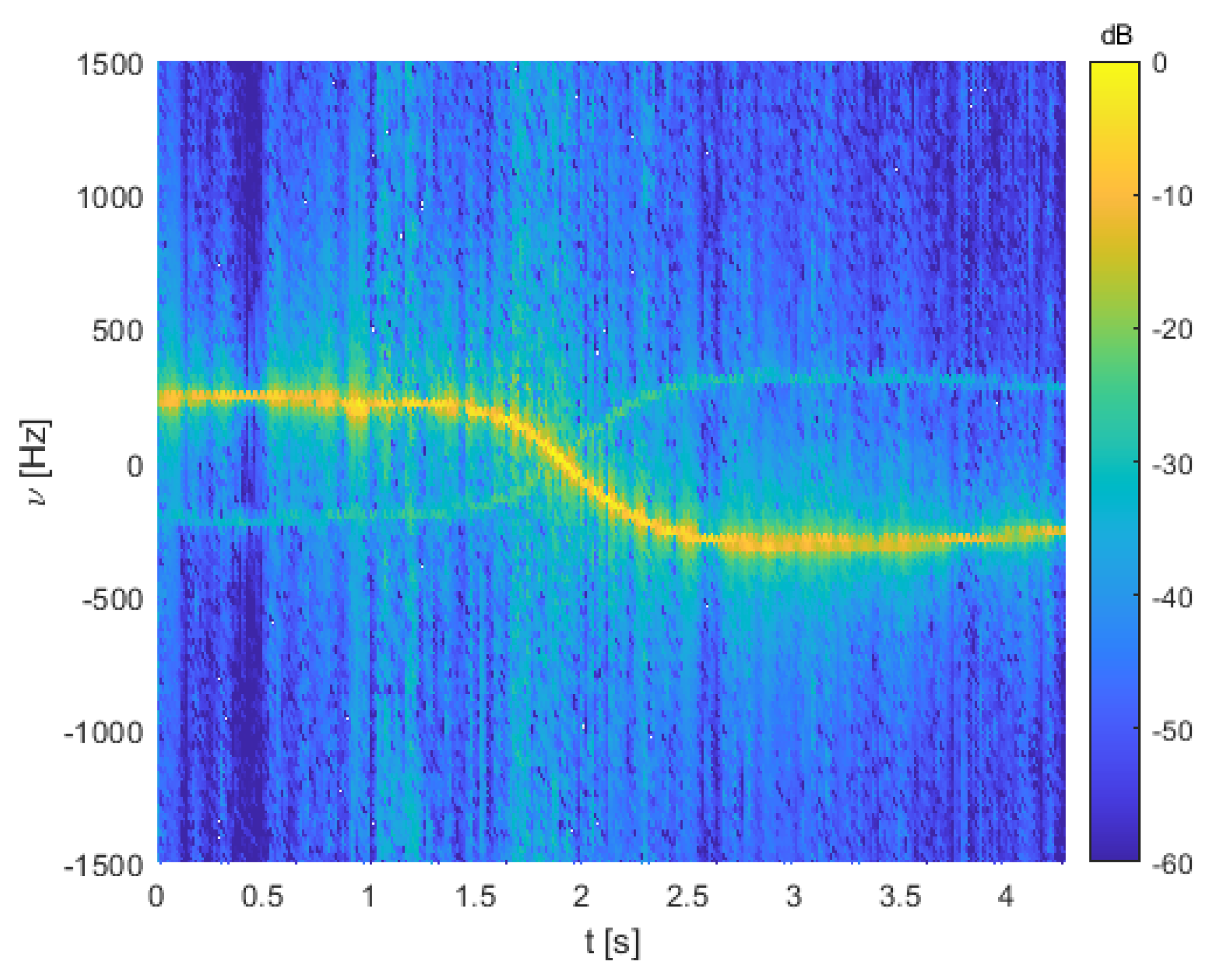
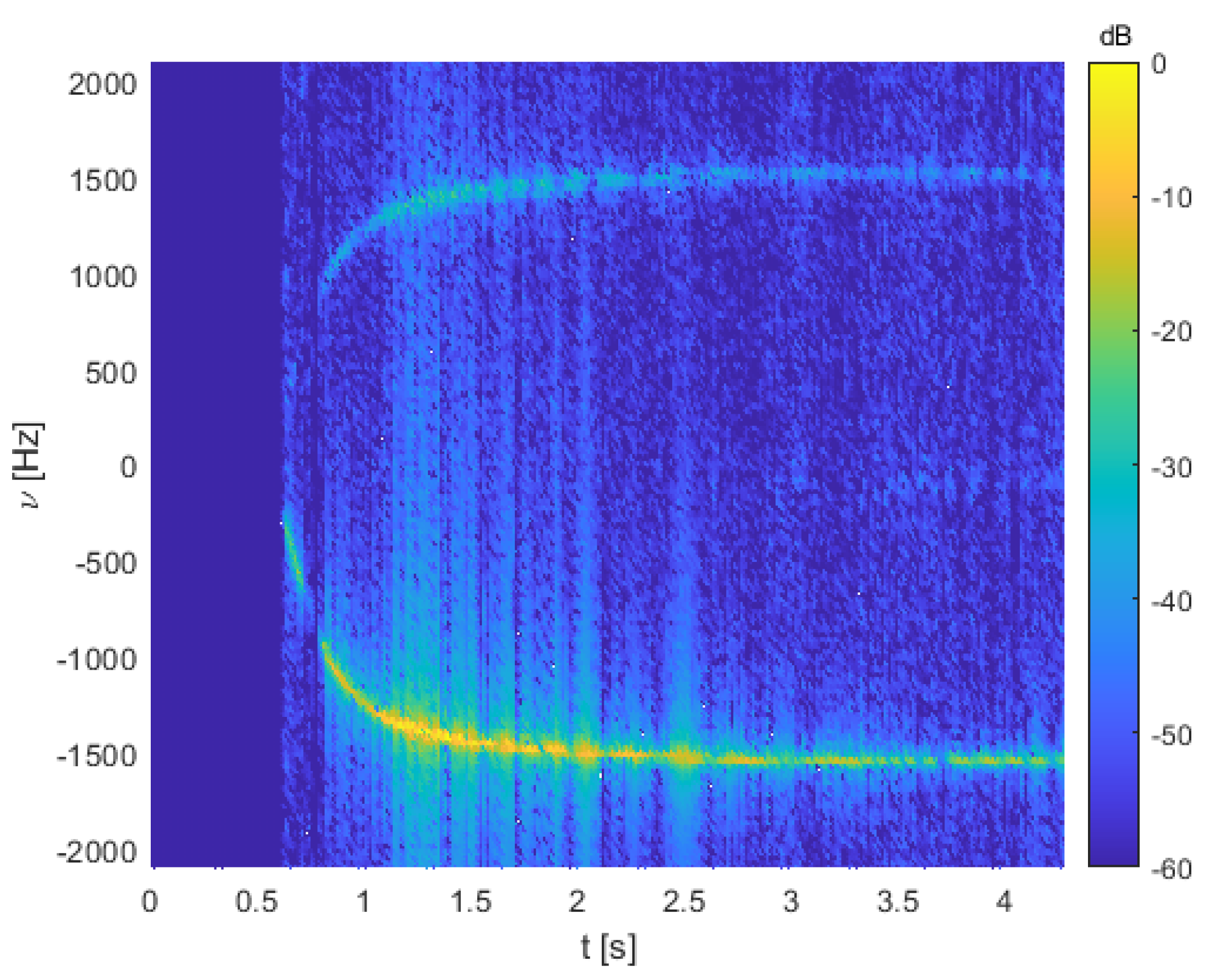
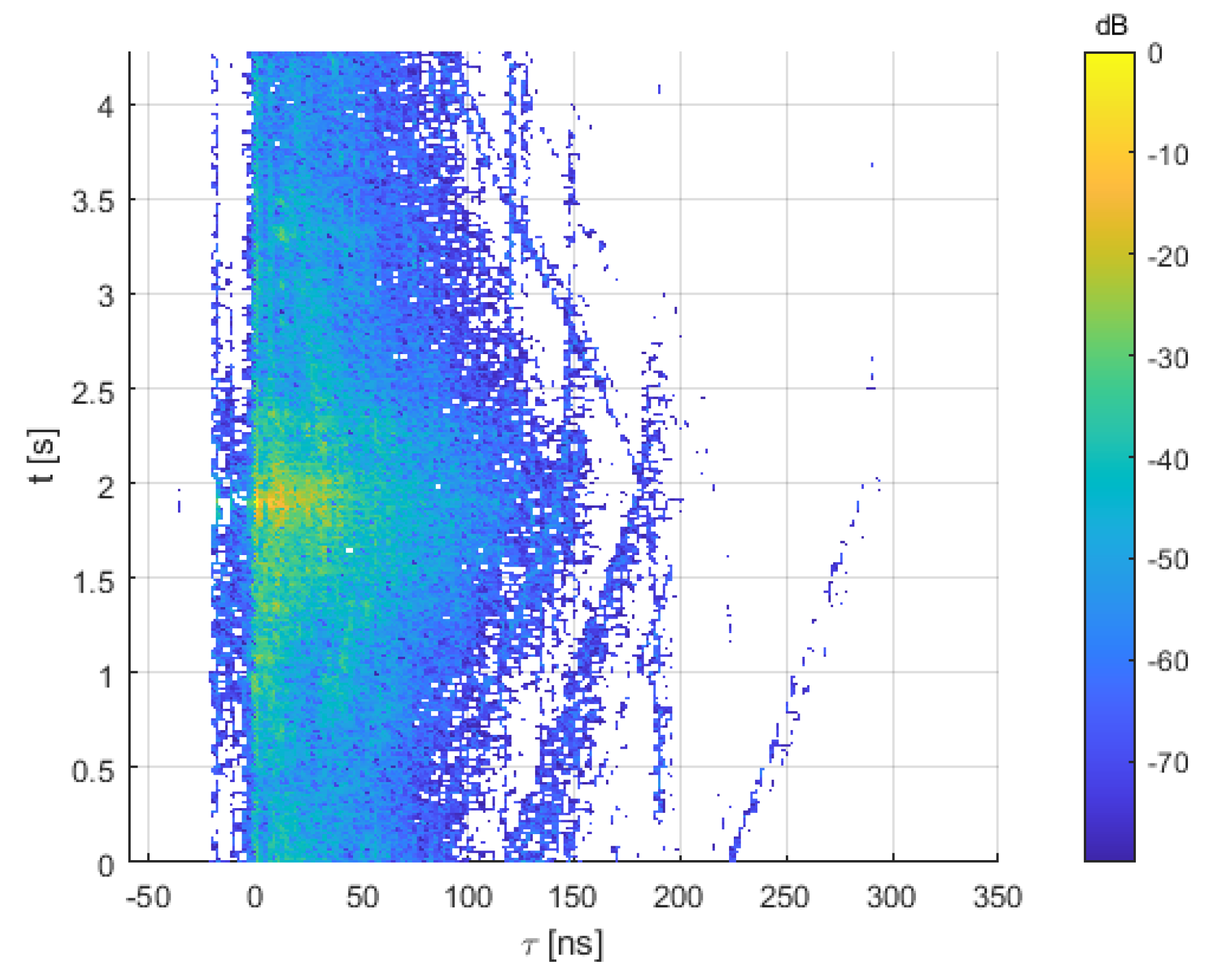
3.2. Low-Speed Scenario
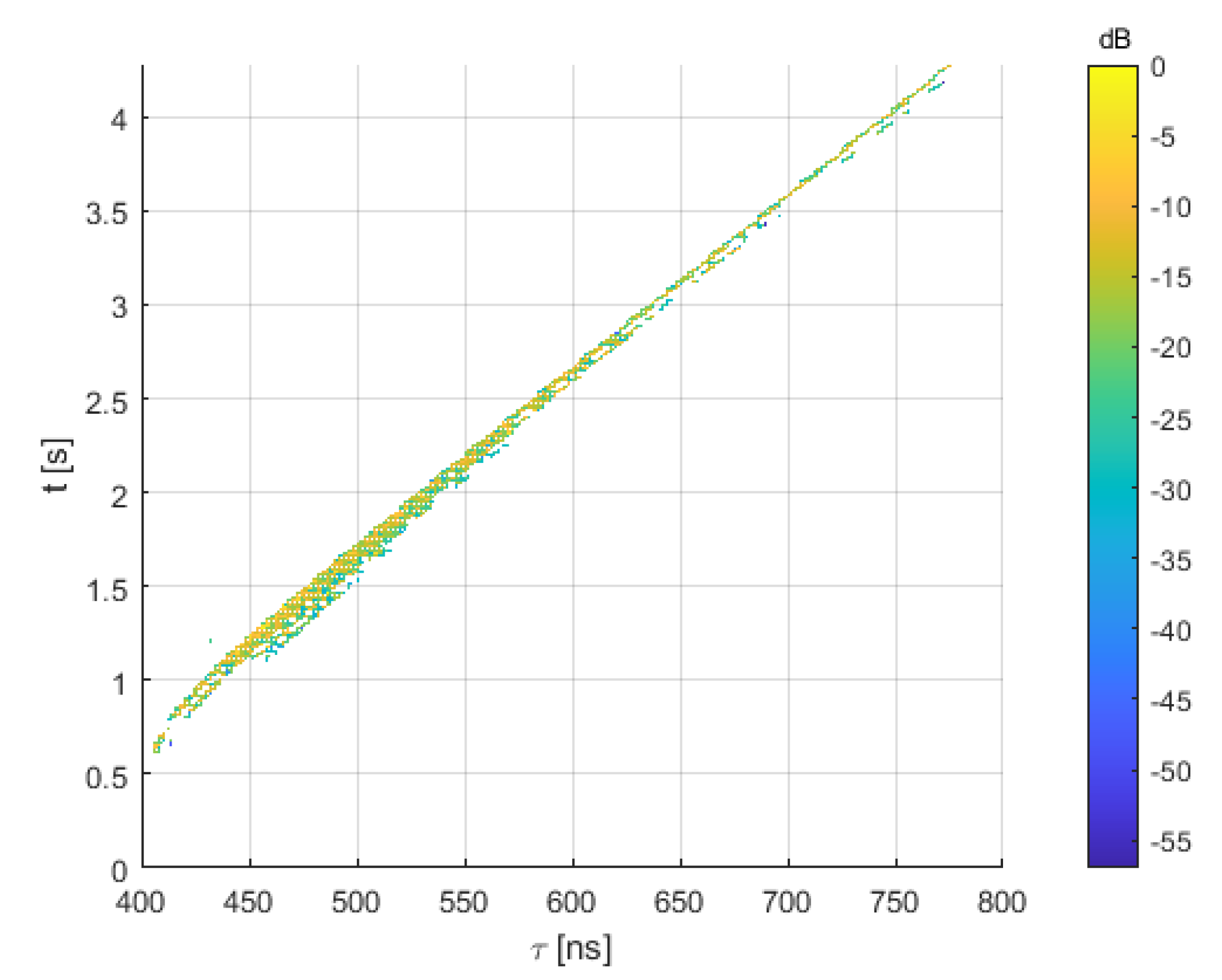
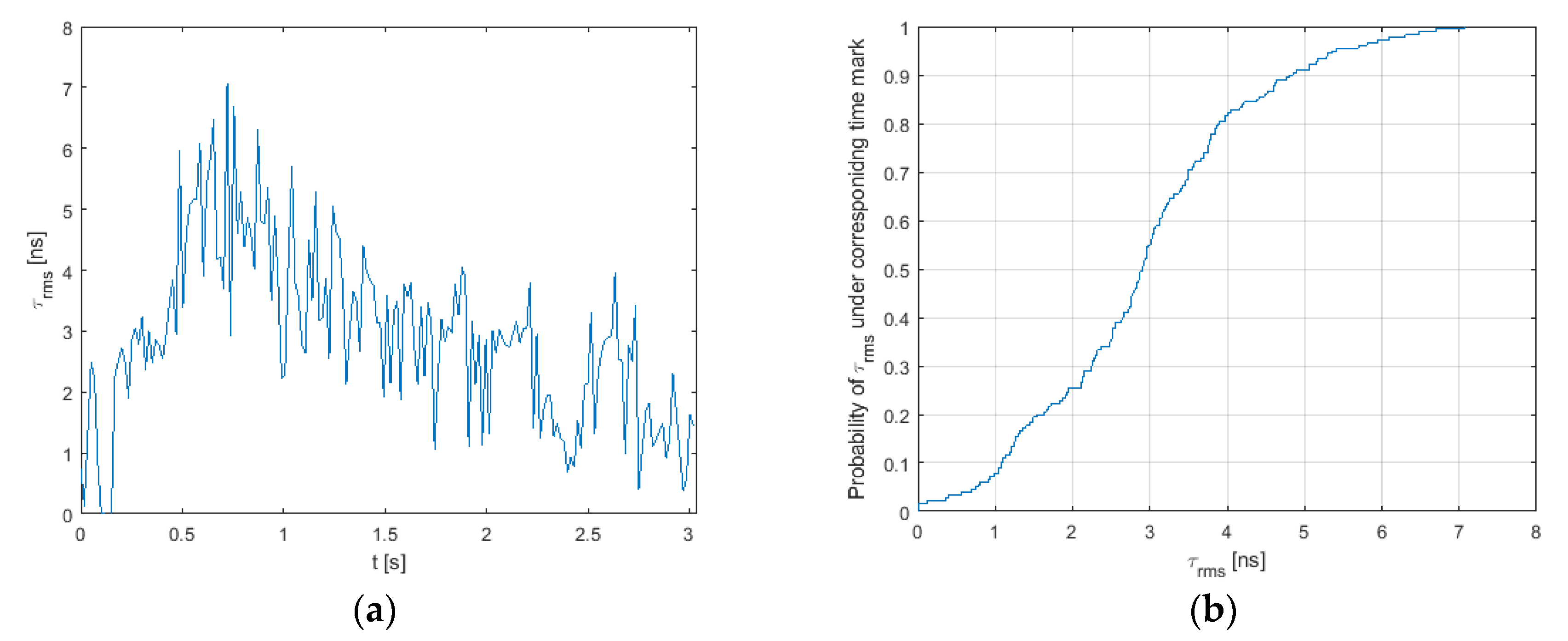
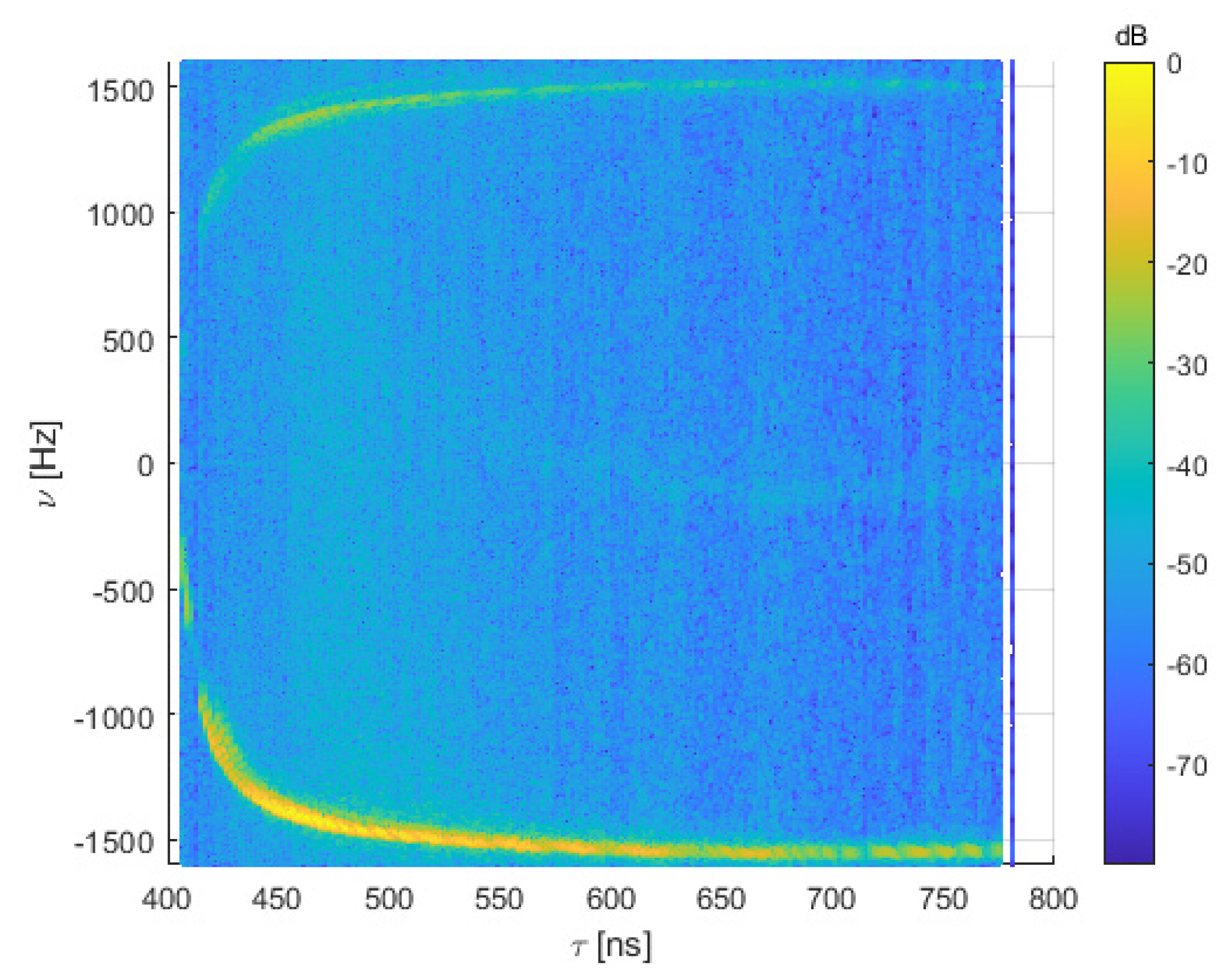
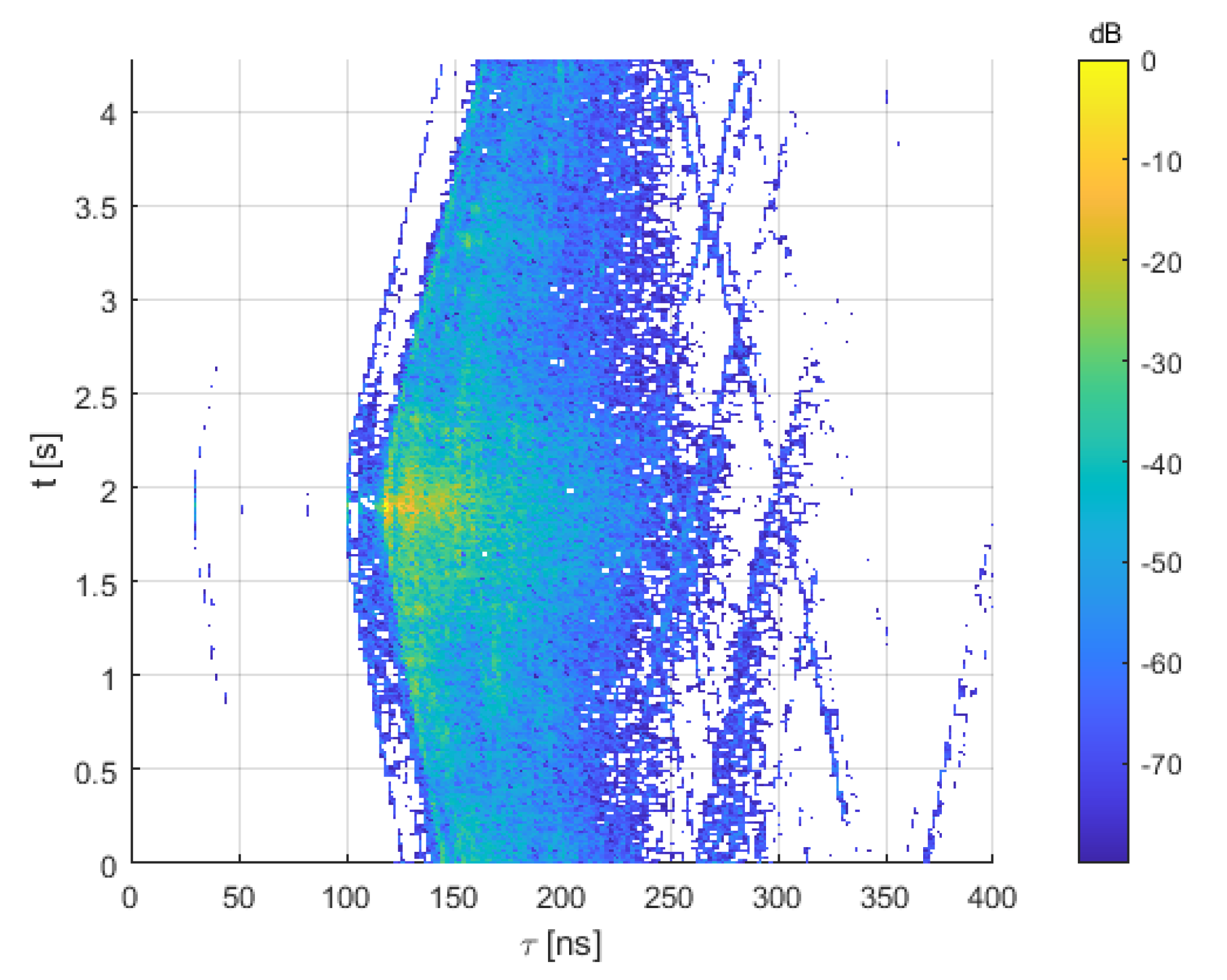
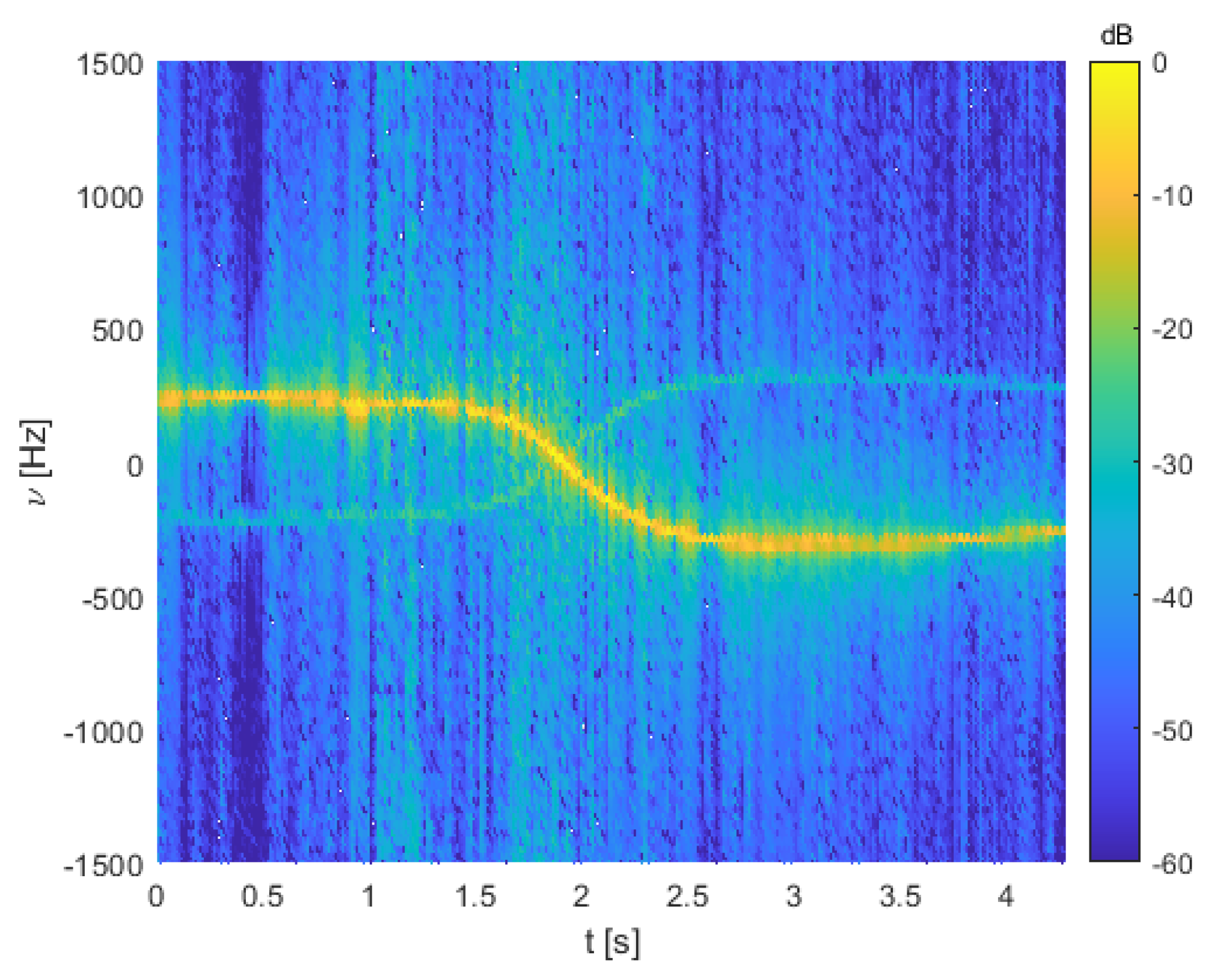
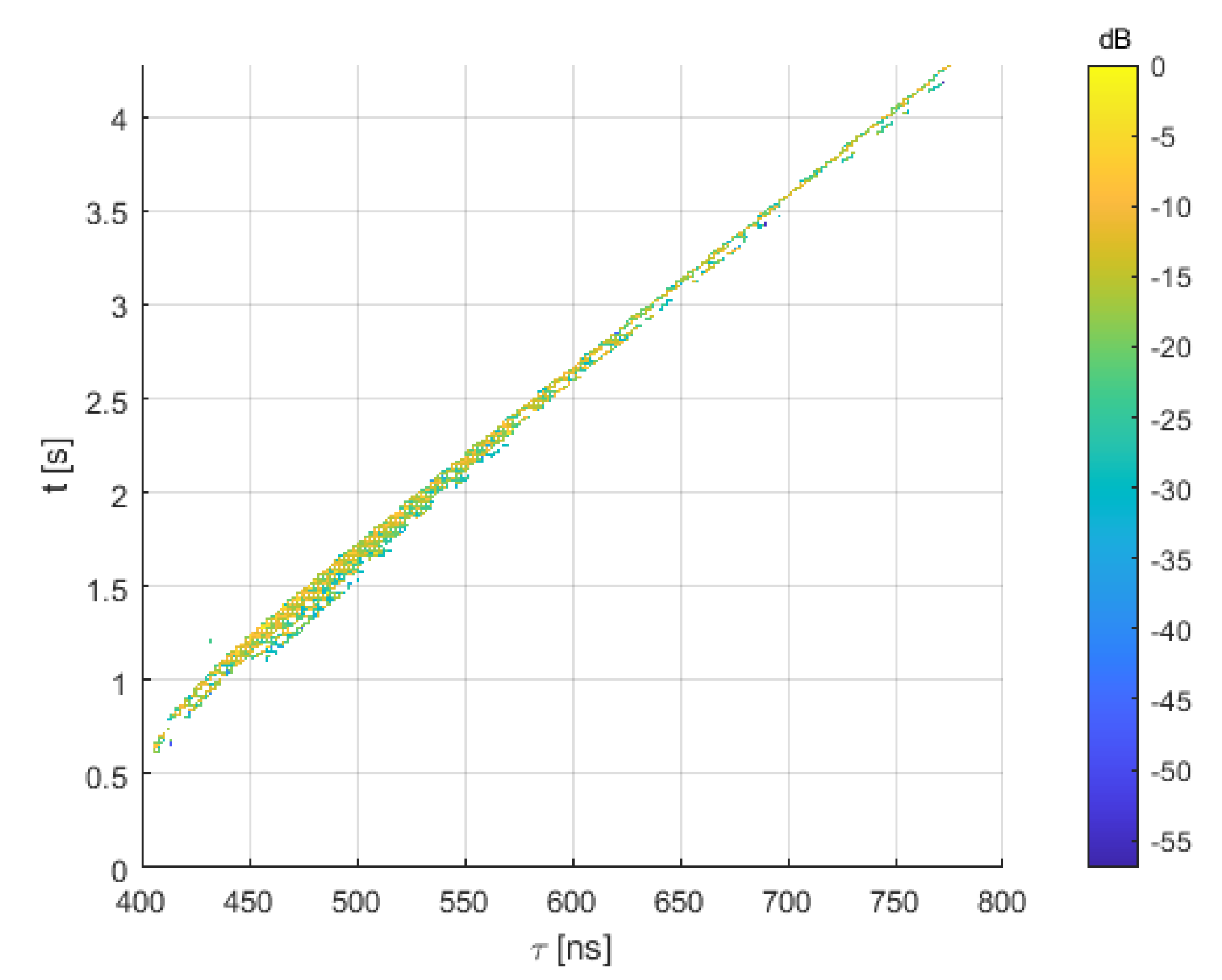
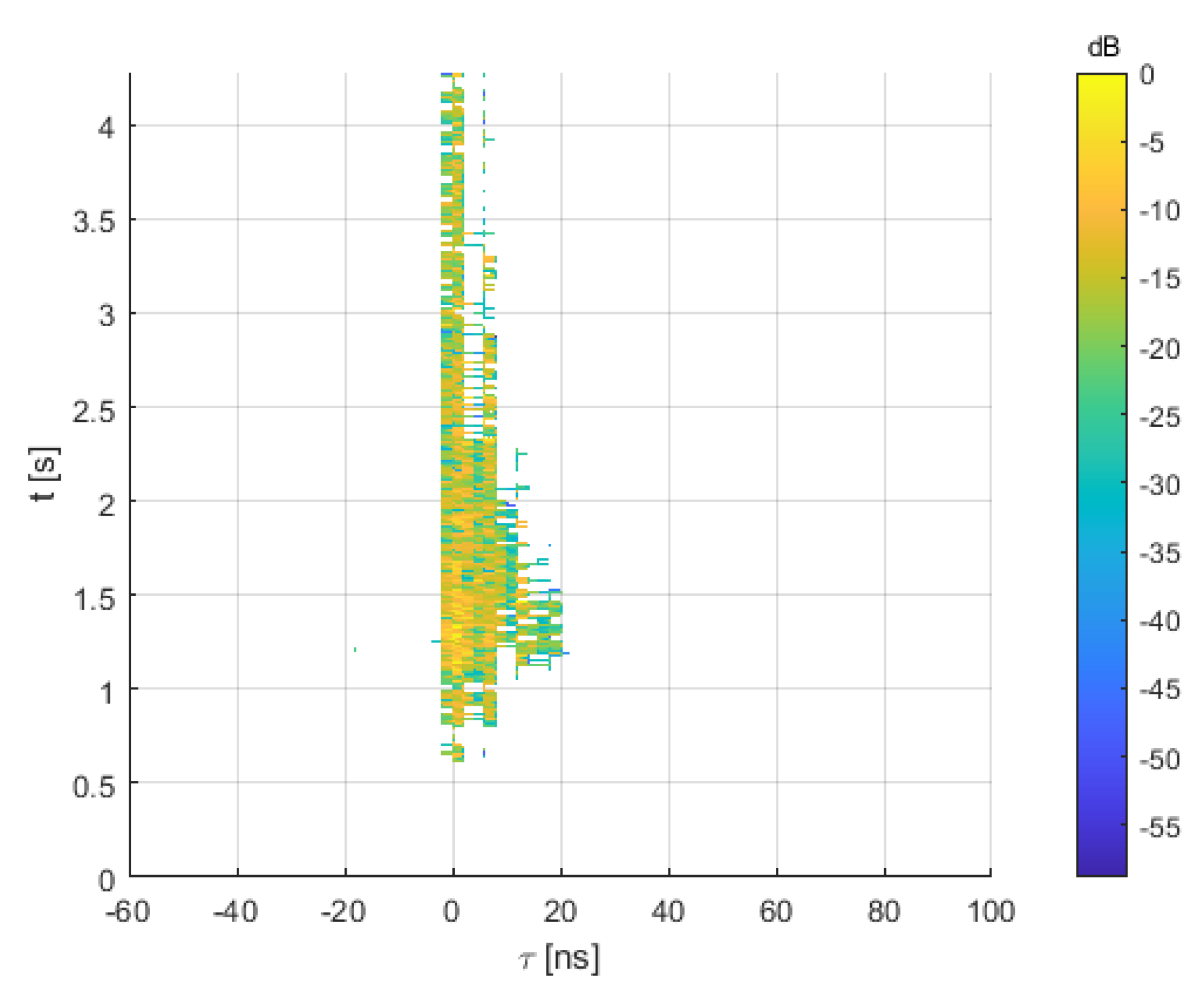
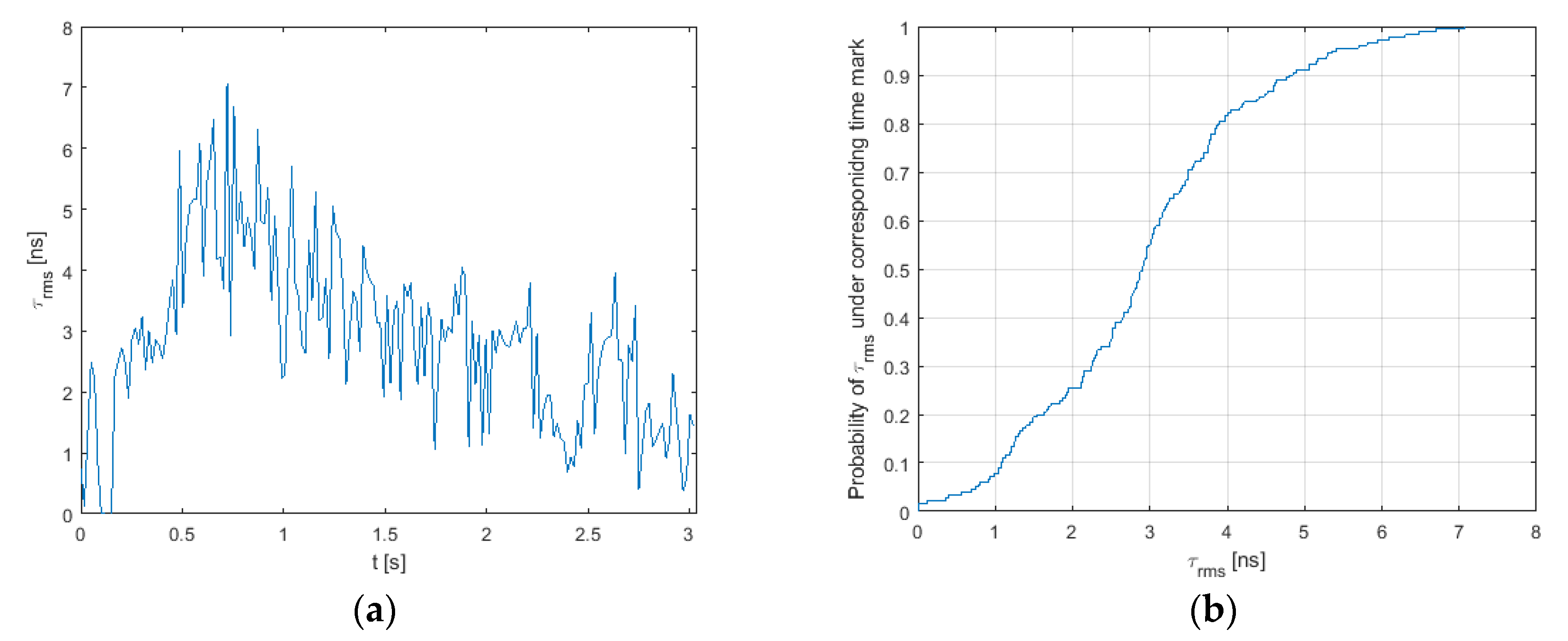
3.3. Highway Scenario
4. Discussion and Conclusions
- Chip rate. By configuration, slower clocks can be generated. This way, delay resolution and channel sampling rate are sacrificed to improve the length of a continuous measurement and the maximum unambiguous delay. Chip rate can be increased by using two converters. Currently, the FPGA boards used have two sockets for converters of the type FPGA Mezzanine Card (FMC). By using both, the chip rate can be doubled, but the deterministic latency described in the JESD204B interface protocol has to be implemented for synchronization [28]. Although the converters and synchronization algorithms were available during the previous campaigns, they were not used, so, at the moment, the maximum allowed chip rate is 500 Mchips/s. This rate gives the delay resolution of 2 ns and RF bandwidth of 1 GHz used in the tests.
- Averaging block size. The length of the averaging inside the FPGA can be modified in powers of 2, with a minimum length of 4 at the moment. Lesser order averages provide higher channel-sampling rates but cut down the duration of a full acquisition and vice versa. Further averaging can be performed offline for different purposes, as seen in Section 3.
- Channel-sounding sequence. It is easily interchangeable. Several of them can be preloaded and swapped without restarting the sounder. A number of options are available here. The simplest of these are to vary the order of the PRBS. Lesser order sequences increase channel-sampling rate at the cost of maximum delay and processing gain and vice versa. Currently, the maximum length for the sequences is 4096, half an FFT block.
- SDRAM depth. The DDR3 chip aboard the FPGA can be swapped by higher capacity models. These are inexpensive and allow to increase the amount of recorded channel responses in a single acquisition period.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bello, P. Characterization of Randomly Time-Variant Linear Channels. IEEE Trans. Commun. Syst. 1963, 11, 360–393. [Google Scholar] [CrossRef] [Green Version]
- Rappaport, T.S. Wireless Communications: Principles and Practice, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Fleury, B.H. An uncertainty relation for WSS processes and its application to WSSUS systems. IEEE Trans. Commun. 1996, 44, 1632–1634. [Google Scholar] [CrossRef]
- Young, W.R.; Lacy, L.Y. Echoes in Transmission at 450 Megacycles from Land-to-Car Radio Units. Proc. IRE 1950, 38, 255–258. [Google Scholar] [CrossRef]
- Rees, J. Measurements of the wide-band radio channel characteristics for rural, residential, and suburban areas. IEEE Trans. Veh. Technol. 1987, 36, 2–6. [Google Scholar] [CrossRef]
- Cox, D. Delay Doppler characteristics of multipath propagation at 910 MHz in a suburban mobile radio environment. IEEE Trans. Antennas Propag. 1972, 20, 625–635. [Google Scholar] [CrossRef]
- Ferreira, D.; Caldeirinha, R.; Leonor, N. A Real Time High-Resolution RF Channel Sounder Based on the Sliding Correlation Principle. IET Microw. Antennas Propag. 2015, 9, 837–846. [Google Scholar] [CrossRef]
- Rappaport, T.S.; MacCartney, G.R.; Samimi, M.K.; Sun, S. Wideband Millimeter-Wave Propagation Measurements and Channel Models for Future Wireless Communication System Design. IEEE Trans. Commun. 2015, 63, 3029–3056. [Google Scholar] [CrossRef]
- Cid, E.L.; Sánchez, M.G.; Alejos, A.V. High speed transmission at 60 GHz for 5G communications. In Proceedings of the IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Vancouver, BC, Canada, 19–24 July 2015; pp. 1007–1008. [Google Scholar] [CrossRef]
- Lee, J.; Liang, J.; Kim, M.D.; Park, J.J.; Park, B.; Chung, H.K. Measurement-Based Propagation Channel Characteristics for Millimeter-Wave 5G Giga Communication Systems. ETRI J. 2016, 38, 1031–1041. [Google Scholar] [CrossRef]
- Miao, R.; Tian, L.; Zheng, Y.; Tang, P.; Huang, F.; Zhang, J. Indoor office channel measurements and analysis of propagation characteristics at 14 GHz. In Proceedings of the 2015 IEEE 26th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Hong Kong, China, 30 August–2 September 2015; pp. 2199–2203. [Google Scholar] [CrossRef]
- Wu, T.; Rappaport, T.S.; Knox, M.E.; Shahrjerdi, D. A Wideband Sliding Correlator-Based Channel Sounder with Synchronization in 65 nm CMOS. In Proceedings of the 2019 IEEE International Symposium on Circuits and Systems (ISCAS), Sapporo, Japan, 26–29 May 2019; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Bajwa, A.S. Wideband Characterisation of UHF Mobile Radio Propagation in Urban and Suburban Areas. PhD’s Thesis, University of Birmingham, Birmingham, UK, 1979. [Google Scholar]
- Berger, G.L.; Safer, H. Channel sounder for the tactical VHF-range. In Proceedings of the MILCOM 97, Monterey, CA, USA, 3–5 November 1997; pp. 1474–1478. [Google Scholar] [CrossRef]
- Prokes, A.; Vychodil, J.; Mikulasek, T.; Blumenstein, J.; Zöchmann, E.; Groll, H.; Mecklenbräuker, C.F.; Hofer, M.; Löschenbrand, D.; Bernadó, L.; et al. Time-Domain Broadband 60 GHz Channel Sounder for Vehicle-to-Vehicle Channel Measurement. In Proceedings of the 2018 IEEE Vehicular Networking Conference (VNC), Taipei, Taiwan, 5–7 December 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Papazian, P.B.; Gentile, C.; Remley, K.A.; Senic, J.; Golmie, N. A Radio Channel Sounder for Mobile Millimeter-Wave Communications: System Implementation and Measurement Assessment. IEEE Trans. Microw. Theory Tech. 2016, 64, 2924–2932. [Google Scholar] [CrossRef]
- Wen, Z.; Kong, H.; Wang, Q.; Li, S.; Zhao, X.; Wang, M.; Sun, S. MmWave channel sounder based on COTS instruments for 5G and indoor channel measurement. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Maharaj, B.T.; Wallace, J.W.; Jensen, M.A.; Linde, L.P. A Low-Cost Open-Hardware Wideband Multiple-Input–Multiple-Output (MIMO) Wireless Channel Sounder. IEEE Trans. Instrum. Meas. 2008, 57, 2283–2289. [Google Scholar] [CrossRef]
- Salous, S.; Feeney, S.M.; Raimundo, X.; Cheema, A.A. Wideband MIMO Channel Sounder for Radio Measurements in the 60 GHz Band. IEEE Trans. Wirel. Commun. 2016, 15, 2825–2832. [Google Scholar] [CrossRef] [Green Version]
- Pahlavan, K.; Howard, S.J. Frequency domain measurements of indoor radio channels. Electron. Lett. 1989, 25, 1645–1647. [Google Scholar] [CrossRef]
- Haneda, K.; Järveläinen, J.; Karttunen, A.; Kyrö, M.; Putkonen, J. Indoor short-range radio propagation measurements at 60 and 70 GHz. In Proceedings of the 8th European Conference on Antennas and Propagation (EuCAP 2014), The Hague, The Netherlands, 6–11 April 2014; pp. 634–638. [Google Scholar] [CrossRef]
- Riobó, M.; Hofman, R.; Cuiñas, I.; García Sánchez, M.; Verhaevert, J. Wideband Performance Comparison between the 40 GHz and 60 GHz Frequency Bands for Indoor Radio Channels. Electronics 2019, 8, 1234. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.; Shao, Y.; Xi, L.; Zhang, H.; Zhang, J. Millimeter-Wave Propagation Measurement and Modeling in Indoor Corridor and Stairwell at 26 and 38 GHz. IEEE Access 2021, 9, 87792–87805. [Google Scholar] [CrossRef]
- Keusgen, W.; Kortke, A.; Peter, M.; Weiler, R. A highly flexible digital radio testbed and 60 GHz application examples. In Proceedings of the 2013 European Microwave Conference, Nuremberg, Germany, 6–10 October 2013; pp. 740–743. [Google Scholar] [CrossRef]
- International Wireless Industry Consortium. Evolutionary & Disruptive Visions towards Ultra High. Capacity Networks White Paper; International Wireless Industry Consortium: Doylestown, PA, USA, 2014. [Google Scholar]
- Turing, G. An introduction to matched filters. IRE Trans. Inf. Theory 1960, 6, 311–329. [Google Scholar] [CrossRef] [Green Version]
- MacCartney, G.R.; Rappaport, T.S. A Flexible Millimeter-Wave Channel Sounder With Absolute Timing. IEEE J. Sel. Areas Commun. 2017, 35, 1402–1418. [Google Scholar] [CrossRef]
- Joint Electron Device Engineering Council (JEDEC). Serial Interface for Data Converters–JESD204B Standard. 2011. Available online: https://www.jedec.org/sites/default/files/docs/JESD204B.pdf (accessed on 29 June 2021).
- Seijo, Ó.; Val, I.; López-Fernández, J.A. Portable Full Channel Sounder for Industrial Wireless Applications With Mobility by Using Sub-Nanosecond Wireless Time Synchronization. IEEE Access 2020, 8, 175576–175588. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Block | Function | Component |
|---|---|---|
| FPGA | Sequence generator | Xilinx VC707 |
| DAC | DAC | AD9161-FMCC-EBZ |
| Rubidium | Frequency reference | SRS PRS10 |
| LO | Local oscillator | HP 83650B |
| Multiplier | Mixer | MITEQ M1826W1 |
| Amplifier | Power amplifier | ERZ-HPA-2700-4200-27 |
| Antenna | Omnidirectional antenna | Flann 21240-20 |
| Directional antenna | MD249-8193 |
| Block | Function | Component |
|---|---|---|
| FPGA | Correlator | Xilinx VC707 |
| ADC | ADC | AD-FMCADC3-EBZ |
| LPF | Anti-aliasing filter | Mini-Circuits SLP-1200+ |
| Multiplier | Mixer | MITEQ DB0440HW1-R |
| Band-pass filter | Band selector | Knowles B280LB0S |
| Amplifier | Low-noise amplifier | MITEQ AMF-5F-26004000-25-13P |
| Antenna | Antenna | Flann MD249-8193 |
| Rubidium | Frequency reference | SRS PRS10 |
| 2 GHz LO | Phase-Locked Loop (PLL) | EMF Systems 52747-443024 |
| 14 GHz LO | PLL | MITEQ DLCRO-010-14075-4-12P |
| Frequency multiplier | Frequency multiplier | MITEQ MAX2M200400-20P |
| Parameter | Value |
|---|---|
| Carrier frequency | 28.65 GHz |
| RF Bandwidth | 1 GHz |
| Delay resolution | 2 ns |
| Channel excitation signal | PRBS-11 |
| Maximum unambiguous delay | 4.09 µs |
| Channel sampling frequency | 15.27 kHz |
| Maximum Doppler shift | 7.63 kHz |
| Maximum sounder speed at fc | 287.74 km/h |
| Maximum continuous acquisition interval | 4.29 s |
| Channel samples per full measurement cycle | 65,536 |
| Processing gain | 33.11 dB |
| Dynamic range | 57 dB |
| t (s) | v (m/s) | α (º) | νth (Hz) | νmeas (Hz) |
|---|---|---|---|---|
| 0 | 5.05 | 62.5 | 222.69 | 223.6 |
| 1 | 5.75 | 66.5 | 218.96 | 223.6 |
| 2 | 7.27 | 97.5 | −90.62 | −89.45 |
| 3 | 7.30 | 117.0 | −316.50 | −313.1 |
| 4 | 5.34 | 124.0 | −285.17 | −283.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
López-Valcárcel, L.A.; García Sánchez, M. A Wideband Radio Channel Sounder for Non-Stationary Channels: Design, Implementation and Testing. Electronics 2021, 10, 1838. https://doi.org/10.3390/electronics10151838
López-Valcárcel LA, García Sánchez M. A Wideband Radio Channel Sounder for Non-Stationary Channels: Design, Implementation and Testing. Electronics. 2021; 10(15):1838. https://doi.org/10.3390/electronics10151838
Chicago/Turabian StyleLópez-Valcárcel, Luis A., and Manuel García Sánchez. 2021. "A Wideband Radio Channel Sounder for Non-Stationary Channels: Design, Implementation and Testing" Electronics 10, no. 15: 1838. https://doi.org/10.3390/electronics10151838
APA StyleLópez-Valcárcel, L. A., & García Sánchez, M. (2021). A Wideband Radio Channel Sounder for Non-Stationary Channels: Design, Implementation and Testing. Electronics, 10(15), 1838. https://doi.org/10.3390/electronics10151838