
Offloading Data through Unmanned Aerial Vehicles: A Dependability Evaluation


 ,
,  ,
,  and
and 
Abstract
:1. Introduction
- Two SPN models (base and extended), which represent and evaluate an architecture based on IoT sensors, UAVs and remote resources, aided by the cloud. The models are highly configurable, as it is possible to calibrate ten timed transitions in the extended model. The models enable system designers to evaluate the studied system according to availability and reliability aspects.
- A sensitivity analysis, which identify the critical points of the architecture, as well as ways to improve it.
- Case studies that provide a practical guide for analyzing the dependability of the proposed architecture. The first case study investigates distinct scenarios for evaluating availability, and the second one focuses on reliability.
2. Related Works
3. Background
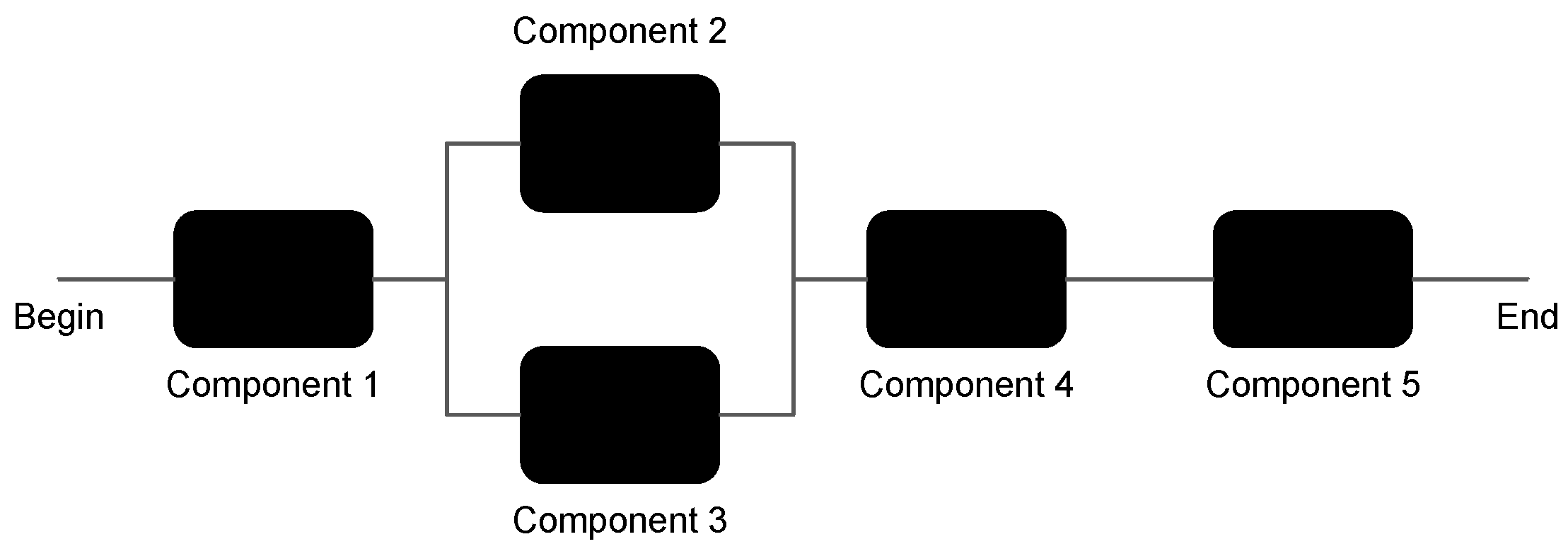
3.1. Reliability Block Diagram
3.2. Stochastic Petri Net
3.3. Sensitivity Analysis with DoE
- The Pareto chart is represented by bars in descending order. The higher the bar, the greater the impact. Each bar represents the influence of each factor on the dependent variable.
- Main effects graphs are used to examine the differences between the level means for one or more factors, graphing the mean response for each factor level connected by a line. It can be applied when using a comparison between the relative strength of the effects of various factors. The signal and magnitude of the main effect can express the mean response value. The magnitude expresses the strength of the effect. The higher the slope of the line, the greater the magnitude of the main effect. It is necessary to consider that the horizontal line means that it has no main effect, that is, each level affects the response in the same way.
- Interaction graphs are responsible for identifying interactions between factors. An interaction occurs when the influence of a given factor on the result is altered (amplified or reduced) by the difference in another factor’s level. Assuming that the lines on the graph are parallel, there is no interaction between the factors. If they are not parallel, there is an interaction between the factors.
4. Evaluated Architecture Overview
- IoT devices are the customers of the application requesting services and sending data. UAVs are controlled via a wireless network (5G, for example). UAVs fly over the communication area, receiving data from mobile devices.
- The base station receives data from UAVs and retransmits them to the cloud.
- The data are processed in the cloud, and the responses are sent back to the IoT devices.
5. SPN Models
5.1. Base Model
5.2. Sensitivity Analysis with DoE
5.3. Extended Model
5.4. Reliability Model
6. Case Study
6.1. Results for Availability
6.2. Reliability
6.3. Discussions
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hassija, V.; Saxena, V.; Chamola, V. A mobile data offloading framework based on a combination of blockchain and virtual voting. Softw. Pract. Exper. 2020. [Google Scholar] [CrossRef]
- Meng, X.; Wang, W.; Zhang, Z. Delay-constrained hybrid computation offloading with cloud and fog computing. IEEE Access 2017, 5, 21355–21367. [Google Scholar] [CrossRef]
- Statista Forecast. Available online: https://www.statista.com/statistics/245501/multiple-mobile-device-ownership-worldwide/ (accessed on 14 February 2021).
- Feng, W.; Tang, J.; Yu, Y.; Song, J.; Zhao, N.; Chen, G.; Wong, K.K.; Chambers, J. UAV-Enabled SWIPT in IoT Networks for Emergency Communications. IEEE Wirel. Commun. 2020, 27, 140–147. [Google Scholar] [CrossRef]
- Ye, H.T.; Kang, X.; Joung, J.; Liang, Y.C. Optimization for Full-Duplex Rotary-Wing UAV-Enabled Wireless-Powered IoT Networks. IEEE Trans. Wirel. Commun. 2020, 19, 5057–5072. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, S.; Zhang, Y. Cooperative Offloading and Resource Management for UAV-Enabled Mobile Edge Computing in Power IoT System. IEEE Trans. Veh. Technol. 2020, 69, 12229–12239. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, K.; Han, J.; Zhu, L.; Xiao, Z.; Xia, X.G. Resource Allocation and 3D Placement for UAV-Enabled Energy-Efficient IoT Communications. IEEE Internet Things J. 2020, 8, 1322–1333. [Google Scholar] [CrossRef]
- Tan, Z.; Qu, H.; Zhao, J.; Zhou, S.; Wang, W. UAV-aided Edge/Fog Computing in Smart IoT Community for Social Augmented Reality. IEEE Internet Things J. 2020, 7, 4872–4884. [Google Scholar] [CrossRef]
- Silva, F.A.; Kosta, S.; Rodrigues, M.; Oliveira, D.; Maciel, T.; Mei, A.; Maciel, P. Mobile cloud performance evaluation using stochastic models. IEEE Trans. Mob. Comput. 2017, 17, 1134–1147. [Google Scholar] [CrossRef]
- Silva, F.A.; Rodrigues, M.; Maciel, P.; Kosta, S.; Mei, A. Planning mobile cloud infrastructures using stochastic petri nets and graphic processing units. In Proceedings of the 2015 IEEE 7th International Conference on Cloud Computing Technology and Science (CloudCom), Vancouver, BC, Canada, 30 November–3 December 2015; pp. 471–474. [Google Scholar]
- Marsan, M.A. Stochastic Petri nets: An elementary introduction. In European Workshop on Applications and Theory in Petri Nets; Springer: Berlin/Heidelberg, Germany, 1988; pp. 1–29. [Google Scholar]
- Lundell, M.; Tang, J.; Nygard, K. Fuzzy petri net for uav decision making. In Proceedings of the 2005 International Symposium on Collaborative Technologies and Systems, St. Louis, MO, USA, 20 May 2005; pp. 347–352. [Google Scholar]
- Gonçalves, P.; Sobral, J.; Ferreira, L.A. Unmanned aerial vehicle safety assessment modelling through petri nets. Reliab. Eng. Syst. Saf. 2017, 167, 383–393. [Google Scholar] [CrossRef]
- Mehta, P. A Petri Net Based Simulation for Multiple Unmanned Aerial Vehicles; North Dakota State University: Fargo, ND, USA, 2019. [Google Scholar]
- Maciel, P.R.; Trivedi, K.S.; Matias, R.; Kim, D.S. Dependability modeling. In Performance and Dependability in Service Computing: Concepts, Techniques and Research Directions; IGI Global: Hershey, PA, USA, 2012; pp. 53–97. [Google Scholar]
- Laprie, J.C. Dependability: Basic concepts and terminology. In Dependability: Basic Concepts and Terminology; Springer: Berlin/Heidelberg, Germany, 1992; pp. 3–245. [Google Scholar]
- Fan, L.; Tang, J.; Ling, Y.; Liu, G.; Li, B. Novel conflict resolution model for multi-UAV based on CPN and 4D Trajectories. Asian J. Control 2016, 18, 721–732. [Google Scholar] [CrossRef]
- Sharma, V.; You, I.; Yim, K.; Chen, R.; Cho, J.H. BRIoT: Behavior rule specification-based misbehavior detection for IoT-embedded cyber-physical systems. IEEE Access 2019, 7, 118556–118580. [Google Scholar] [CrossRef]
- Sharma, V.; Jayakody, D.N.K.; You, I.; Kumar, R.; Li, J. Secure and efficient context-aware localization of drones in urban scenarios. IEEE Commun. Mag. 2018, 56, 120–128. [Google Scholar] [CrossRef]
- Liu, J. Knowledge representation and reasoning for flight control system based on weighted fuzzy Petri nets. In Proceedings of the 2010 5th International Conference on Computer Science & Education, Hefei, China, 24–27 August 2010; pp. 528–534. [Google Scholar]
- Zhou, H.; Zhang, C.; Li, Y.; Gu, Y.; Zhou, S. Verifying the Safety of Aviation Software Based on Extended Colored Petri Net. Math. Probl. Eng. 2019, 2019, 9185910. [Google Scholar] [CrossRef]
- Chen, Z.; Xiao, N.; Han, D. Multilevel Task Offloading and Resource Optimization of Edge Computing Networks Considering UAV Relay and Green Energy. Appl. Sci. 2020, 10, 2592. [Google Scholar] [CrossRef] [Green Version]
- Cheng, N.; Lyu, F.; Quan, W.; Zhou, C.; He, H.; Shi, W.; Shen, X. Space/aerial-assisted computing offloading for IoT applications: A learning-based approach. IEEE J. Sel. Areas Commun. 2019, 37, 1117–1129. [Google Scholar] [CrossRef]
- Faraci, G.; Grasso, C.; Schembra, G. Design of a 5G Network Slice Extension with MEC UAVs Managed with Reinforcement Learning. IEEE J. Sel. Areas Commun. 2020, 38, 2356–2371. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Kim, D.S.; Park, J.S. Availability modeling and analysis of a data center for disaster tolerance. Future Gener. Comput. Syst. 2016, 56, 27–50. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Min, D.; Choi, E. A Hierarchical Modeling and Analysis Framework for Availability and Security Quantification of IoT Infrastructures. Electronics 2020, 9, 155. [Google Scholar] [CrossRef] [Green Version]
- Guo, H.; Yang, X. A simple reliability block diagram method for safety integrity verification. Reliab. Eng. Syst. Saf. 2007, 92, 1267–1273. [Google Scholar] [CrossRef]
- Čepin, M. Reliability block diagram. In Assessment of Power System Reliability; Springer: Berlin/Heidelberg, Germany, 2011; pp. 119–123. [Google Scholar]
- Nannapaneni, S.; Dubey, A.; Abdelwahed, S.; Mahadevan, S.; Neema, S. A model-based approach for reliability assessment in component-based systems. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, Fort Worth, TX, USA, 29 September–2 October 2014. [Google Scholar]
- Kim, M.C. Reliability block diagram with general gates and its application to system reliability analysis. Ann. Nucl. Energy 2011, 38, 2456–2461. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Min, D.; Choi, E.; Thang, T.D. Reliability and Availability Evaluation for Cloud Data Center Networks using Hierarchical Models. IEEE Access 2019, 7, 9273–9313. [Google Scholar] [CrossRef]
- Carvalho, D.; Rodrigues, L.; Endo, P.T.; Kosta, S.; Silva, F.A. Mobile Edge Computing Performance Evaluation using Stochastic Petri Nets. In Proceedings of the 2020 IEEE Symposium on Computers and Communications (ISCC), Rennes, France, 7–10 July 2020; pp. 1–6. [Google Scholar]
- Silva, F.A.; Fé, I.; Gonçalves, G. Stochastic models for performance and cost analysis of a hybrid cloud and fog architecture. J. Supercomput. 2020, 77, 1537–1561. [Google Scholar] [CrossRef]
- Santos, G.L.; Gomes, D.; Kelner, J.; Sadok, D.; Silva, F.A.; Endo, P.T.; Lynn, T. The internet of things for healthcare: Optimising e-health system availability in the fog and cloud. Int. J. Comput. Sci. Eng. 2020, 21, 615–628. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Min, D.; Choi, E.; Lee, J.W. Dependability and Security Quantification of an Internet of Medical Things Infrastructure based on Cloud-Fog-Edge Continuum for Healthcare Monitoring using Hierarchical Models. IEEE Internet Things J. 2021. [Google Scholar] [CrossRef]
- Ferreira, L.; da Silva Rocha, E.; Monteiro, K.H.C.; Santos, G.L.; Silva, F.A.; Kelner, J.; Sadok, D.; Bastos Filho, C.J.; Rosati, P.; Lynn, T.; et al. Optimizing Resource Availability in Composable Data Center Infrastructures. In Proceedings of the 2019 9th Latin-American Symposium on Dependable Computing (LADC), Natal, Brazil, 19–21 November 2019; pp. 1–10. [Google Scholar]
- Rodrigues, L.; Endo, P.T.; Silva, F.A. Stochastic Model for Evaluating Smart Hospitals Performance. In Proceedings of the 2019 IEEE Latin-American Conference on Communications (LATINCOM), Salvador, Brazil, 11–13 November 2019; pp. 1–6. [Google Scholar]
- Pinheiro, T.; Silva, F.A.; Fé, I.; Oliveira, D.; Maciel, P. Performance and Resource Consumption Analysis of Elastic Systems on Public Clouds. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 2115–2120. [Google Scholar]
- Campolongo, F.; Tarantola, S.; Saltelli, A. Tackling quantitatively large dimensionality problems. Comput. Phys. Commun. 1999, 117, 75–85. [Google Scholar] [CrossRef]
- Kleijnen, J.P. Sensitivity analysis and optimization in simulation: Design of experiments and case studies. In Proceedings of the Winter Simulation Conference, Arlington, VA, USA, 3–6 December 1995; pp. 133–140. [Google Scholar]
- Melo, C.; Matos, R.; Dantas, J.; Maciel, P. Capacity-oriented availability model for resources estimation on private cloud infrastructure. In Proceedings of the 2017 IEEE 22nd Pacific Rim International Symposium on Dependable Computing (PRDC), Christchurch, New Zealand, 22–25 January 2017; pp. 255–260. [Google Scholar]
- Gillespie, A.M. Reliability & maintainability applications in logistics & supply chain. In Proceedings of the 2015 Annual Reliability and Maintainability Symposium (RAMS), Palm Harbor, FL, USA, 26–29 January 2015; pp. 1–6. [Google Scholar]
- Rusnak, P.; Kvassay, M.; Zaitseva, E.; Kharchenko, V.; Fesenko, H. Reliability Assessment of Heterogeneous Drone Fleet with Sliding Redundancy. In Proceedings of the 2019 10th International Conference on Dependable Systems, Services and Technologies (DESSERT), Leeds, UK, 5–7 June 2019; pp. 19–24. [Google Scholar] [CrossRef]
- Santos, G.L.; Endo, P.T.; da Silva Lisboa, M.F.F.; da Silva, L.G.F.; Sadok, D.; Kelner, J.; Lynn, T. Analyzing the availability and performance of an e-health system integrated with edge, fog and cloud infrastructures. J. Cloud Comput. 2018, 7, 16. [Google Scholar] [CrossRef] [Green Version]
- Andrade, E.; Nogueira, B. Dependability evaluation of a disaster recovery solution for IoT infrastructures. J. Supercomput. 2018, 76, 1828–1849. [Google Scholar] [CrossRef]
- Silva, B.; Matos, R.; Callou, G.; Figueiredo, J.; Oliveira, D.; Ferreira, J.; Dantas, J.; Junior, A.; Alves, V.; Maciel, P. Mercury: An Integrated Environment for Performance and Dependability Evaluation of General Systems. In Proceedings of the Industrial Track at 45th Dependable Systems and Networks Conference (DSN), Rio de Janeiro, Brazil, 22–25 June 2015. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Context | Metric | Type of Model | Offloading Application? | Use of Cloud/Edge | Sensitivity Analysis |
|---|---|---|---|---|---|---|
| [13] | Security | Collisions and Forced Landings | Petri Net | No | No | No |
| [17] | Route Planning | Distance between UAVs | Colored Petri Net | No | No | No |
| [18] | Malfunction detection | Possibilities of error identification and Reliability | Hierarchical Context-Aware Aspect-Oriented Petri Net | No | No | Yes |
| [19] | Collision avoidance and location | Memory and decision time | Hierarchical Context-Aware Aspect-Oriented Petri Net | No | No | No |
| [20] | Fault detection | Abnormality rate in components | Fuzzy Petri Net | No | No | No |
| [21] | Security | Security level | Colored Petri Net | No | No | No |
| [22] | Multi-task offloading | Reliability | Markov Decision Process | Yes | Yes | No |
| [23] | Offloading and Consumption Reduction | Performance | Markov Decision Process with Reinforcement Learning | Yes | Yes | No |
| [24] | Multiprocess Offloading | Performance | Markov Decision Process with Reinforcement Learning | Yes | Yes | No |
| This work | Offloading using UAVs | Availability and Reliability | Stochastic Petri Net and RBD | Yes | Yes | Yes |
| Parameter | Level 1 | Level 2 |
|---|---|---|
| BS_MTTF | 250,000 | 750,000 |
| BS_MTTR | 1 | 3 |
| NET_MTTF | 41,610 | 124,830 |
| NET_MTTR | 6 | 18 |
| UAV_MTTF | 17,711.7 | 53,135 |
| UAV_MTTR | 0.5 | 1.5 |
| CLOUD_MTTF | 62.94 | 189 |
| CLOUD_MTTR | 0.45 | 1.37 |
| Scenario | BS_MTTF | BS_MTTR | NET_MTTF | NET_MTTR | UAV_MTTF | UAV_MTTR | CLOUD_MMTF | CLOUD_MTTR |
|---|---|---|---|---|---|---|---|---|
| #1 | 250,000 | 1 | 124,830 | 6 | 17,711.7 | 1.5 | 62.94 | 0.45 |
| #2 | 750,000 | 1 | 41,610 | 6 | 17,711.7 | 1.5 | 189.00 | 1.37 |
| #3 | 750,000 | 3 | 41,610 | 18 | 17,711.7 | 0.5 | 189.00 | 1.37 |
| #4 | 750,000 | 1 | 41,610 | 6 | 53,135.0 | 1.5 | 189.00 | 0.45 |
| #5 | 250,000 | 1 | 41,610 | 6 | 53,135.0 | 0.5 | 62.94 | 0.45 |
| #6 | 250,000 | 3 | 124,830 | 18 | 53,135.0 | 0.5 | 62.94 | 1.37 |
| #7 | 250,000 | 1 | 124,830 | 18 | 53,135.0 | 1.5 | 189.00 | 0.45 |
| #8 | 250,000 | 1 | 41,610 | 18 | 17,711.7 | 0.5 | 189.00 | 0.45 |
| #9 | 250,000 | 1 | 124,830 | 6 | 53,135.0 | 1.5 | 62.94 | 1.37 |
| #10 | 750,000 | 3 | 41,610 | 6 | 17,711.7 | 0.5 | 62.94 | 0.45 |
| #11 | 750,000 | 3 | 124,830 | 18 | 17,711.7 | 1.5 | 189.00 | 0.45 |
| #12 | 250,000 | 1 | 124,830 | 18 | 17,711.7 | 1.5 | 189.00 | 1.37 |
| #13 | 750,000 | 1 | 41,610 | 18 | 17,711.7 | 1.5 | 62.94 | 0.45 |
| #14 | 250,000 | 3 | 124,830 | 18 | 17,711.7 | 0.5 | 62.94 | 0.45 |
| #15 | 750,000 | 3 | 124,830 | 6 | 53,135.0 | 1.5 | 62.94 | 0.45 |
| #16 | 250,000 | 3 | 124,830 | 6 | 53,135.0 | 0.5 | 189.00 | 0.45 |
| #17 | 750,000 | 3 | 124,830 | 18 | 53,135.0 | 1.5 | 189.00 | 1.37 |
| #18 | 250,000 | 3 | 124,830 | 6 | 17,711.7 | 0.5 | 189.00 | 1.37 |
| #19 | 250,000 | 3 | 41,610 | 6 | 53,135.0 | 1.5 | 189.00 | 1.37 |
| #20 | 750,000 | 3 | 41,610 | 6 | 53,135.0 | 0.5 | 62.94 | 1.37 |
| #21 | 250,000 | 1 | 41,610 | 6 | 17,711.7 | 0.5 | 62.94 | 1.37 |
| #22 | 750,000 | 1 | 124,830 | 6 | 17,711.7 | 0.5 | 189.00 | 0.45 |
| #23 | 750,000 | 3 | 41,610 | 18 | 53,135.0 | 0.5 | 189.00 | 0.45 |
| #24 | 750,000 | 1 | 124,830 | 6 | 53,135.0 | 0.5 | 189.00 | 1.37 |
| #25 | 750,000 | 1 | 124,830 | 18 | 53,135.0 | 0.5 | 62.94 | 0.45 |
| #26 | 250,000 | 1 | 41,610 | 18 | 53,135.0 | 0.5 | 189.00 | 1.37 |
| #27 | 750,000 | 3 | 124,830 | 6 | 17,711.7 | 1.5 | 62.94 | 1.37 |
| #28 | 750,000 | 1 | 124,830 | 18 | 17,711.7 | 0.5 | 62.94 | 1.37 |
| #29 | 750,000 | 1 | 41,610 | 18 | 53,135.0 | 1.5 | 62.94 | 1.37 |
| #30 | 250,000 | 3 | 41,610 | 18 | 17,711.7 | 1.5 | 62.94 | 1.37 |
| #31 | 250,000 | 3 | 41,610 | 6 | 17,711.7 | 1.5 | 189.00 | 0.45 |
| #32 | 250,000 | 3 | 41,610 | 18 | 53,135.0 | 1.5 | 62.94 | 0.45 |
| Component | MTTF (h) | MTTR (h) |
|---|---|---|
| Base Station | 500,000 | 2 |
| Network | 83,220 | 12 |
| UAV | 35,423.31 | 1.5 |
| Cloud | 125.89 | 0.91 |
| Edge | 4765.79 | 3.47 |
| Component | MTTF (h) | MTTR (h) |
|---|---|---|
| HW | 8760 | 1.67 |
| OS | 2893 | 0.25 |
| CM | 788.4 | 1 |
| PM | 788.4 | 1 |
| BBS | 788.4 | 1 |
| FBS | 788.4 | 1 |
| Hypervisor | 2990 | 1 |
| +IM | 788.4 | 1 |
| VM | 2880 | 0.019 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brito, C.; Silva, L.; Callou, G.; Nguyen, T.A.; Min, D.; Lee, J.-W.; Silva, F.A. Offloading Data through Unmanned Aerial Vehicles: A Dependability Evaluation. Electronics 2021, 10, 1916. https://doi.org/10.3390/electronics10161916
Brito C, Silva L, Callou G, Nguyen TA, Min D, Lee J-W, Silva FA. Offloading Data through Unmanned Aerial Vehicles: A Dependability Evaluation. Electronics. 2021; 10(16):1916. https://doi.org/10.3390/electronics10161916
Chicago/Turabian StyleBrito, Carlos, Leonardo Silva, Gustavo Callou, Tuan Anh Nguyen, Dugki Min, Jae-Woo Lee, and Francisco Airton Silva. 2021. "Offloading Data through Unmanned Aerial Vehicles: A Dependability Evaluation" Electronics 10, no. 16: 1916. https://doi.org/10.3390/electronics10161916
APA StyleBrito, C., Silva, L., Callou, G., Nguyen, T. A., Min, D., Lee, J.-W., & Silva, F. A. (2021). Offloading Data through Unmanned Aerial Vehicles: A Dependability Evaluation. Electronics, 10(16), 1916. https://doi.org/10.3390/electronics10161916