
Electro-Magnetic and Structural Analysis of Six-Pole Hybrid-Excited Permanent Magnet Motors



Abstract
:1. Introduction
- the torque increases during the flux-weakening operations,
- the power increases accordingly, and
- the motor efficiency remains high for a wider speed range.
- to verify that the rotor flux reduction yields an improvement of the performance of the motor during the flux-weakening operations,
- to verify that with less saliency ratio, it is possible reach high speed with high torque and almost constant power, above the base speed,
- to compare different rotor topologies (series and parallel configuration) in order to highlight the advantages and drawbacks of each one,
- to introduce a magnetic network that is used to explain the different contribution of the excitation winding to the rotor flux,
- to verify that the harmonic content in the electro-motive force is reduced even varying the excitation current, and
- the excitation losses represent a minimum component of the total losses.
2. Analysis and Design of the HEPM/IPM Motor
2.1. Equations and Control Adopted in Flux-Weakening Region
- , which is the sum of PMs flux linkage and Excitation flux linkage,
- p, which are the poles pair,
- , which is the direct axis current,
- , which is the quadrature axis current, and
- , which is the electrical speed
2.2. Magnetic Network
3. SRC-6 Configuration
3.1. Air Gap Flux Density Controlled by the Rotor Excitation Current
3.2. Flux Linkage and Electromotive Force
3.3. Performance of the SRC-6 Machine
4. PRC-6 Configuration
4.1. Air Gap Flux Density Modulated by the Rotor Excitation Current
4.2. Flux Linkage and Electromotive Force
4.3. Performance of the PRC-6 Machine
5. PRC-2 Motor Configuration
5.1. Air Gap Flux Density Controlled by the Rotor Excitation Current
5.2. Flux Linkage and Electromotive Force
5.3. Performance of the PRC-2 Machine
6. Overall Comparison
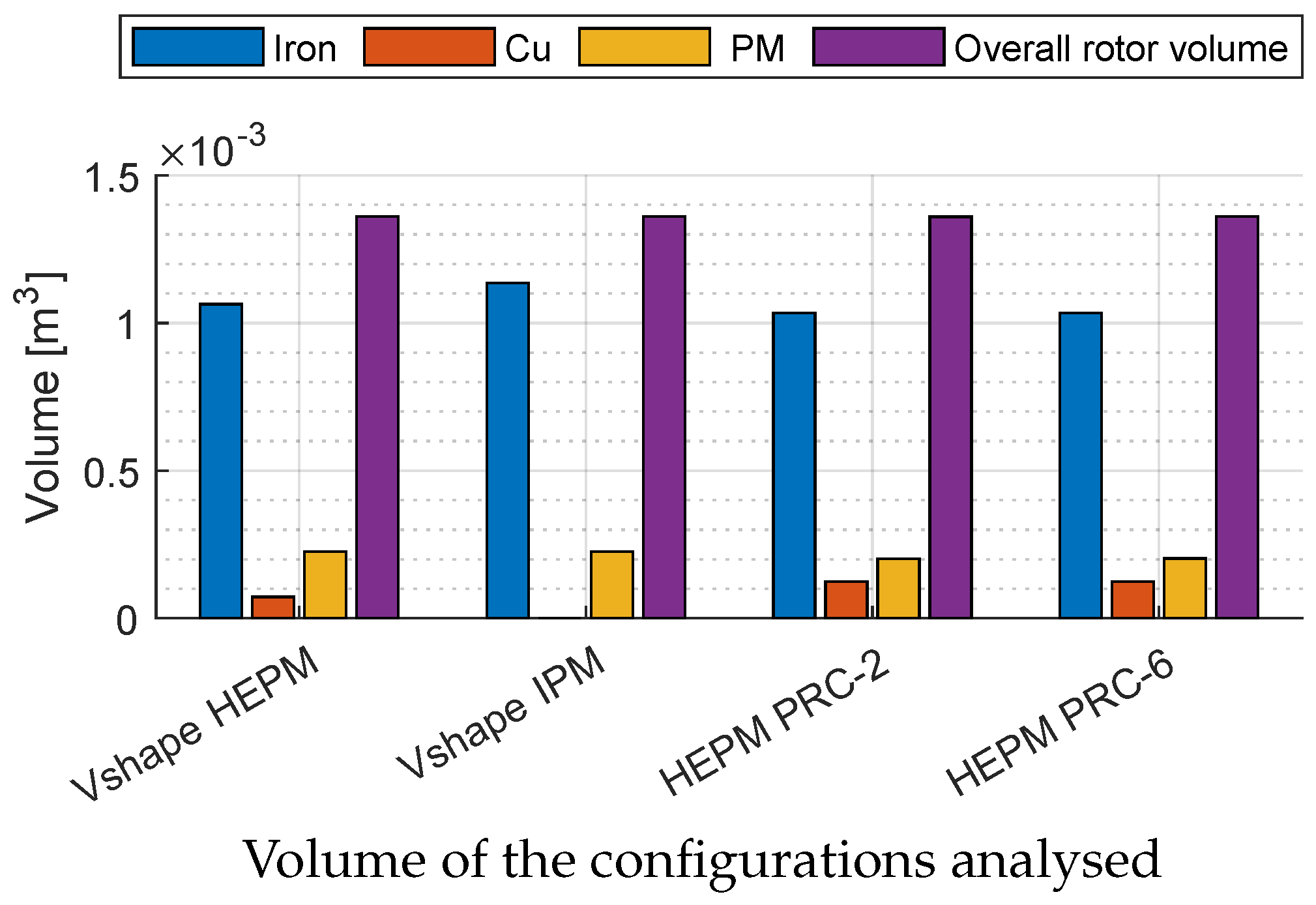
6.1. Volume and Cost of the Motors Comparison
6.2. Performance Comparison
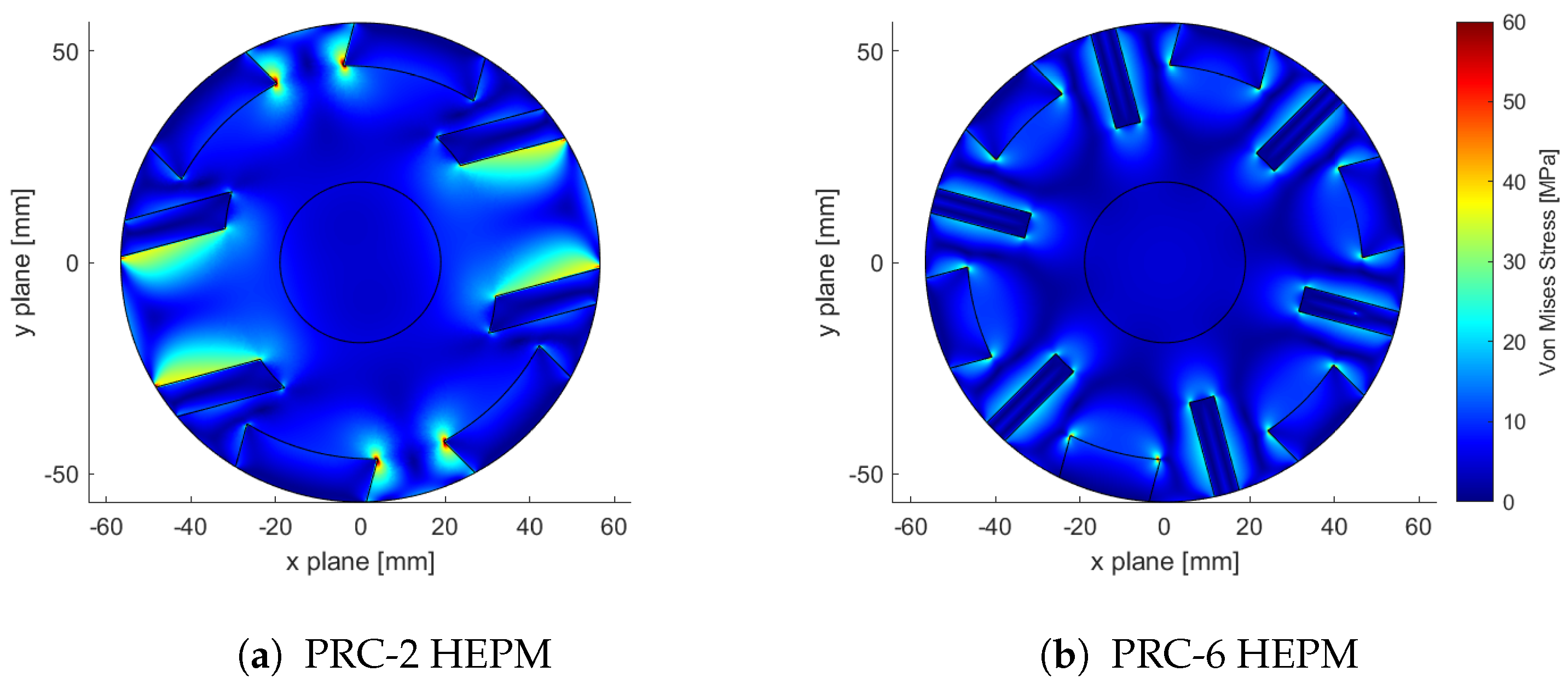
6.3. Mechanical Stress
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| I | Current () |
| p | Number of pole pairs |
| Rated motor current () | |
| Flux-linkage due to rotor winding ( ) | |
| d-axis current () | |
| Flux-linkage due to PMs ( ) | |
| q-axis current () | |
| Total hybrid flux-linkage ( ) | |
| d-axis inductance () | |
| Electrical speed ( −1) | |
| q-axis inductance () | |
| Maximum electrical speed ( −1) | |
| Flux weakening torque ( ) | |
| Flux weakening electrical speed ( −1) | |
| T | Electromagnetic torque ( ) |
| V | Motor phase voltage () |
| Rated motor voltage | |
| MTPV | Maximum Torque Per Volts |
| MTPA | Maximum Torque Per Amps |
| PM | Permanent Magnet |
| FW | Flux-weakening |
| HEPM | Hybrid Excitation Permanent Magnet |
| MTPV | Maximum Torque Per Volts |
References
- Ortombina, L.; Tinazzi, F.; Zigliotto, M. An effective start-up algorithm for sensorless synchronous reluctance and IPM motor drives. In Proceedings of the 2017 IEEE 12th International Conference on Power Electronics and Drive Systems (PEDS), Honolulu, HI, USA, 12–15 December 2017; pp. 1062–1067. [Google Scholar] [CrossRef]
- Carlet, P.G.; Favato, A.; Bolognani, S.; Dörfler, F. Data-driven predictive current control for synchronous motor drives. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 5148–5154. [Google Scholar] [CrossRef]
- Cirimele, V.; Torchio, R.; Villa, J.L.; Freschi, F.; Alotto, P.; Codecasa, L.; Rienzo, L.D. Uncertainty Quantification for SAE J2954 Compliant Static Wireless Charge Components. IEEE Access 2020, 8, 171489–171501. [Google Scholar] [CrossRef]
- Cirimele, V.; Torchio, R.; Virgillito, A.; Freschi, F.; Alotto, P. Challenges in the Electromagnetic Modeling of Road Embedded Wireless Power Transfer. Energies 2019, 12, 2677. [Google Scholar] [CrossRef] [Green Version]
- Jha, R.K.; Buja, G.; Bertoluzzo, M.; Giacomuzzi, S.; Mude, K.N. Performance Comparison of the One-Element Resonant EV Wireless Battery Chargers. IEEE Trans. Ind. Appl. 2018, 54, 2471–2482. [Google Scholar] [CrossRef]
- Dendouga, A.; Dendouga, A. High Performance Vector Control of Permanent Magnet Synchronous Motor Fed by Direct SVM Matrix Converter. In Proceedings of the 2019 4th International Conference on Power Electronics and Their Applications (ICPEA), Elazig, Turkey, 25–27 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Chalmers, B.; Hamed, S.; Baines, G. Parameters and performances of a high-field permanent-magnet synchronous motor for variable-frequency operation. IEE Proc. B 1985, 132, 117–124. [Google Scholar] [CrossRef]
- Gu, A.; Guo, Y.; Dong, J.; Ruan, B.; Lian, Y.; Zhang, S.; Song, X. Modeling and Analysis of the Flux-Weakening Range of Interior Permanent Magnet Synchronous Machines with Segmented Permanent Magnets. In Proceedings of the 2020 8th International Conference on Power Electronics Systems and Applications (PESA), Hong Kong, China, 7–10 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Miller, T. Brushless Permanent-Magnet and Reluctance Motor Drive; Claredon Press: Oxford, UK, 1989; Volume 1. [Google Scholar]
- Zhu, Z.Q.; Howe, D. Electrical Machines and Drives for Electric, Hybrid, and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 746–765. [Google Scholar] [CrossRef]
- Fratta, A.; Vagati, A.; Villata, F. Design Criteria of an IPM Machine Suitable for Field-Weakened Operation. In Proceedings of the International Conference on Electrical Machines, Cambridge, MA, USA, 13–15 August 1990. [Google Scholar]
- Liu, X.; Chen, H.; Zhao, J.; Belahcen, A. Research on the Performances and Parameters of Interior PMSM Used for Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3533–3545. [Google Scholar] [CrossRef]
- Jahns, T.; Kliman, G.; Neumann, T. Interior permanent-magnet synchronous motors for adjustable-speed drives. IEEE Trans. Ind. Appl. 1986, 22, 738–747. [Google Scholar] [CrossRef]
- Jahns, T. Flux-weakening regime operation of an interior permanent-magnet synchronous motor drive. IEEE Trans. Ind. Appl. 1987, 23, 681–689. [Google Scholar] [CrossRef]
- Sebastian, T.; Slemon, G. Operating limits of inverter-driven permanent magnet motor drives. IEEE Trans. Ind. Appl. 1987, 23, 327–333. [Google Scholar] [CrossRef]
- Schiferl, R.; Lipo, T. Power capability of salient pole permanent magnet synchronous motors in variable speed drive applications. IEEE Trans. Ind. Appl. 1990, 26, 115–123. [Google Scholar] [CrossRef]
- Sneyers, B.; Novotny, D.; Lipo, T. Field weakening in buried permanent magnet AC motor drives. IEEE Trans. Ind. Appl. 1985, 21, 398–407. [Google Scholar] [CrossRef]
- Lavrinovicha, L.; Dirba, J. Comparison of permanent magnet synchronous motor and synchronous reluctance motor based on their torque per unit volume. In Proceedings of the 2014 Electric Power Quality and Supply Reliability Conference (PQ), Rakvere, Estonia, 11–13 June 2014; pp. 233–236. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S. Design considerations about synchronous motor drives for flux weakening applications. Proc. Symp. Electr. Drives Des. Appl. 1994, 1, 185–190. [Google Scholar]
- Lee, S.H.; Lee, H.J.; Hong, C.; Yoon, Y.D. Flux Weakening Control for Synchronous Reluctance Machines Based on Parameters Estimated at Stand-Still. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 6128–6134. [Google Scholar] [CrossRef]
- Betz, R.; Javanovic, M.; Lagerquist, R.; Miller, T. Aspects of the control of synchronous reluctance machines including saturation and iron losses. In Proceedings of the Conference Record of the 1992 IEEE Industry Applications Society Annual Meeting, Houston, TX, USA, 4–9 October 1992; Volume 1, pp. 456–463. [Google Scholar]
- Mahmoud, H.; Degano, M.; Bacco, G.; Bianchi, N.; Gerada, C. Synchronous Reluctance Motor Iron Losses: Analytical Model and Optimization. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 1640–1647. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S. Synchronous reluctance motor drives: Overload and FW performance taking into account iron saturation. Proc. Int. Conf. Electr. Mach. 1996, 1, 360–365. [Google Scholar]
- Babetto, C.; Bacco, G.; Berardi, G.; Bianchi, N. High speed motors: A comparison between synchronous PM and reluctance machines. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 3927–3934. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S. Parameters and volt-ampere ratings of a synchronous motor drive for flux-weakening applications. IEEE Trans. Power Electron. 1997, 12, 895–903. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S. Magnetic Models of Saturated Interior Permanent Magnet Motors based on Finite Element Analysis. In Proceedings of the Conference Record of 1998 IEEE Industry Applications Conference. Thirty-Third IAS Annual Meeting, St. Louis, MO, USA, 12–15 October 1998; Volume 1, pp. 27–34. [Google Scholar]
- Kefsi, L.; Touzani, Y.; Gabsi, M. Hybrid Excitation Synchronous Motor control with a new flux weakening strategy. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Amara, Y.; Vido, L.; Gabsi, M.; Hoang, E.; Ben Ahmed, A.H.; Lecrivain, M. Hybrid Excitation Synchronous Machines: Energy-Efficient Solution for Vehicles Propulsion. IEEE Trans. Veh. Technol. 2009, 58, 2137–2149. [Google Scholar] [CrossRef]
- Amara, Y.; Hlioui, S.; Ahmed, H.B.; Gabsi, M. Power Capability of Hybrid Excited Synchronous Motors in Variable Speed Drives Applications. IEEE Trans. Magn. 2019, 55, 1–12. [Google Scholar] [CrossRef]
- Morimoto, S.; Takeda, Y.; Hirasa, T.; Taniguchi, K. Expansion of operating limits for permanent magnet motor by current vector control considering inverter capability. IEEE Trans. Ind. Appl. 1990, 26, 866–871. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Parasiliti, F.; Villani, M. Prediction of overload and flux-weakening performance of an IPM motor drive: Analytical and finite element approach. In Proceedings of the Electrical Drives Design and Applications, Lausanne, Switzerland, 7–9 September 1999; Volume 1. [Google Scholar]
- Pellegrino, G.; Vagati, A.; Boazzo, B.; Guglielmi, P. Comparison of Induction and PM Synchronous Motor Drives for EV Application Including Design Examples. IEEE Trans. Ind. Appl. 2012, 48, 2322–2332. [Google Scholar] [CrossRef] [Green Version]
- Boldea, I.; Coroban-Schramel, V.; Andreescu, G.D.; Blaabjerg, F.; Scridon, S. BEGA Starter/Alternator—Vector Control Implementation and Performance for Wide Speed Range at Unity Power Factor Operation. IEEE Trans. Ind. Appl. 2010, 46, 150–158. [Google Scholar] [CrossRef]
- Chattopadhyay, R.; Islam, M.S.; Boldea, I.; Husain, I. FEA Characterization of Bi-Axial Excitation Machine for Automotive Traction Applications. In Proceedings of the 2021 IEEE International Electric Machines Drives Conference (IEMDC), Hartford, CT, USA, 17–20 May 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Wang, Q.; Niu, S. A Novel Hybrid-Excited Dual-PM Machine With Bidirectional Flux Modulation. IEEE Trans. Energy Convers. 2017, 32, 424–435. [Google Scholar] [CrossRef]
- Cao, R.; Zhang, X.; Yuan, X. A New Three-Phase Hybride Excitation Flux-Switching Motor for EV/HEV Applications. In Proceedings of the 2019 IEEE International Electric Machines Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019; pp. 1398–1403. [Google Scholar] [CrossRef]
- Cinti, L.; Bianchi, N. Hybrid-Excited PM Motor for Electric Vehicle. Energies 2021, 14, 916. [Google Scholar] [CrossRef]
- Cinti, L.; Michieletto, D.; Bianchi, N.; Bertoluzzo, M. A Comparison between Hybrid Excitation and Interior Permanent Magnet Motors. In Proceedings of the 2021 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Modena, Italy, 8–9 April 2021; pp. 10–15. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated working point operations | |||
| Stator Rms current density | 10 | ||
| Inverter peak current | 74.4 | ||
| Voltage DC bus | 600 | ||
| PM characteristics | |||
| Type | NdFeB | − | − |
| Coercivity | 850 | ||
| Relative permeability | 1.049 | − | |
| Electrical conductivity | 0.667 | ||
| Stator winding | |||
| Slot conductors | 8 | − | |
| Machine parallel paths | 1 | − | |
| Rated peak current | |||
| Stator geometry | |||
| Air gap | g | 0.89 | |
| Number of poles | 6 | − | |
| Outer diameter | 173 | ||
| Inner diameter | 115 | ||
| Axial length | 150 | ||
| Slot opening height | 0.5 | ||
| Wedge height | 2.75 | ||
| Slot height | 17.5 | ||
| Slot opening width | 2.5 | ||
| Stator cross section area | 104.4 | ||
| Number of Slots | 36 | − | |
| Shaft diameter | 38 | ||
| PM thickness | 6 | ||
| PM width | 21 | ||
| Rotor slot cross-area section | 80 | ||
| Rotor current density | 15 |
| PM thickness | 10 | ||
| PM width | 22 | ||
| Rotor slot cross-area section | 138 | ||
| Rotor current density | 10 |
| PM thickness | 10 | ||
| PM width | 32 | ||
| Rotor slot cross-area section | 206.5 | ||
| Rotor current density | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cinti, L.; Carlucci, M.; Bianchi, N.; Bertoluzzo, M. Electro-Magnetic and Structural Analysis of Six-Pole Hybrid-Excited Permanent Magnet Motors. Electronics 2021, 10, 2051. https://doi.org/10.3390/electronics10172051
Cinti L, Carlucci M, Bianchi N, Bertoluzzo M. Electro-Magnetic and Structural Analysis of Six-Pole Hybrid-Excited Permanent Magnet Motors. Electronics. 2021; 10(17):2051. https://doi.org/10.3390/electronics10172051
Chicago/Turabian StyleCinti, Luca, Mattia Carlucci, Nicola Bianchi, and Manuele Bertoluzzo. 2021. "Electro-Magnetic and Structural Analysis of Six-Pole Hybrid-Excited Permanent Magnet Motors" Electronics 10, no. 17: 2051. https://doi.org/10.3390/electronics10172051