Design of Integrated Autonomous Driving Control System That Incorporates Chassis Controllers for Improving Path Tracking Performance and Vehicle Stability


Abstract
:1. Introduction
2. Vehicle Modeling
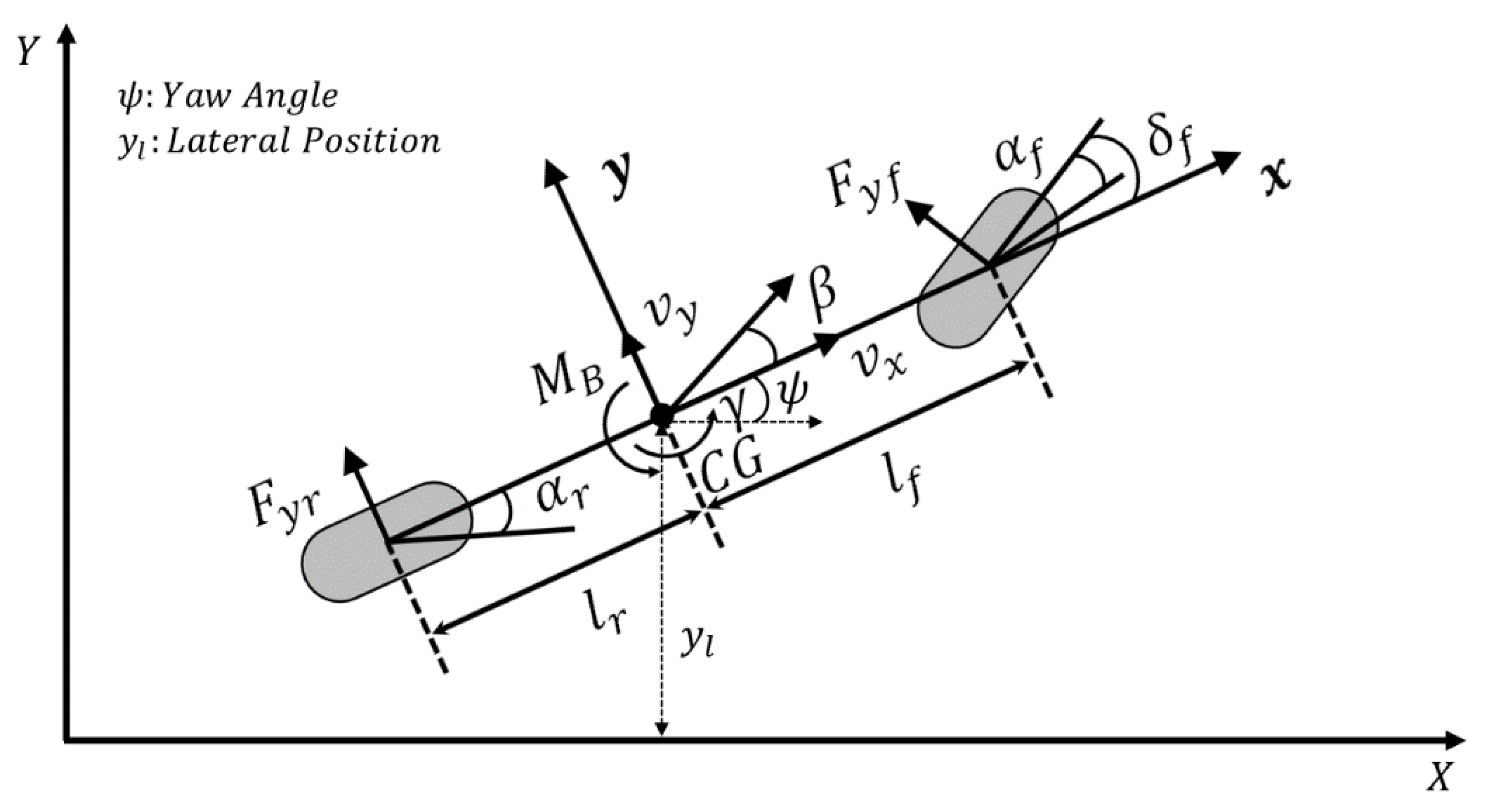
2.1. Vehicle Model for Path Tracking
2.2. Vehicle Model for Torque Vectoring
3. AD Controller
3.1. Longitudinal Controller
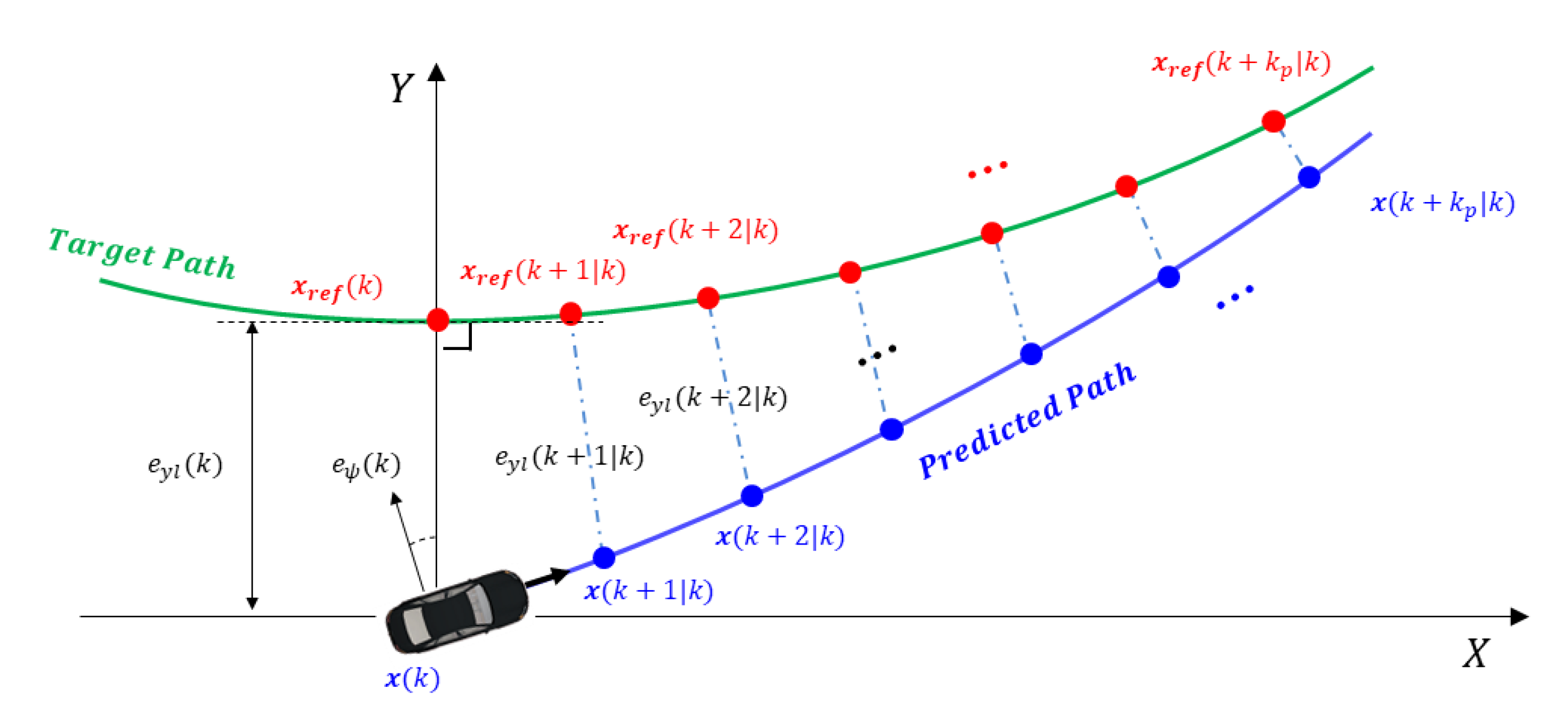
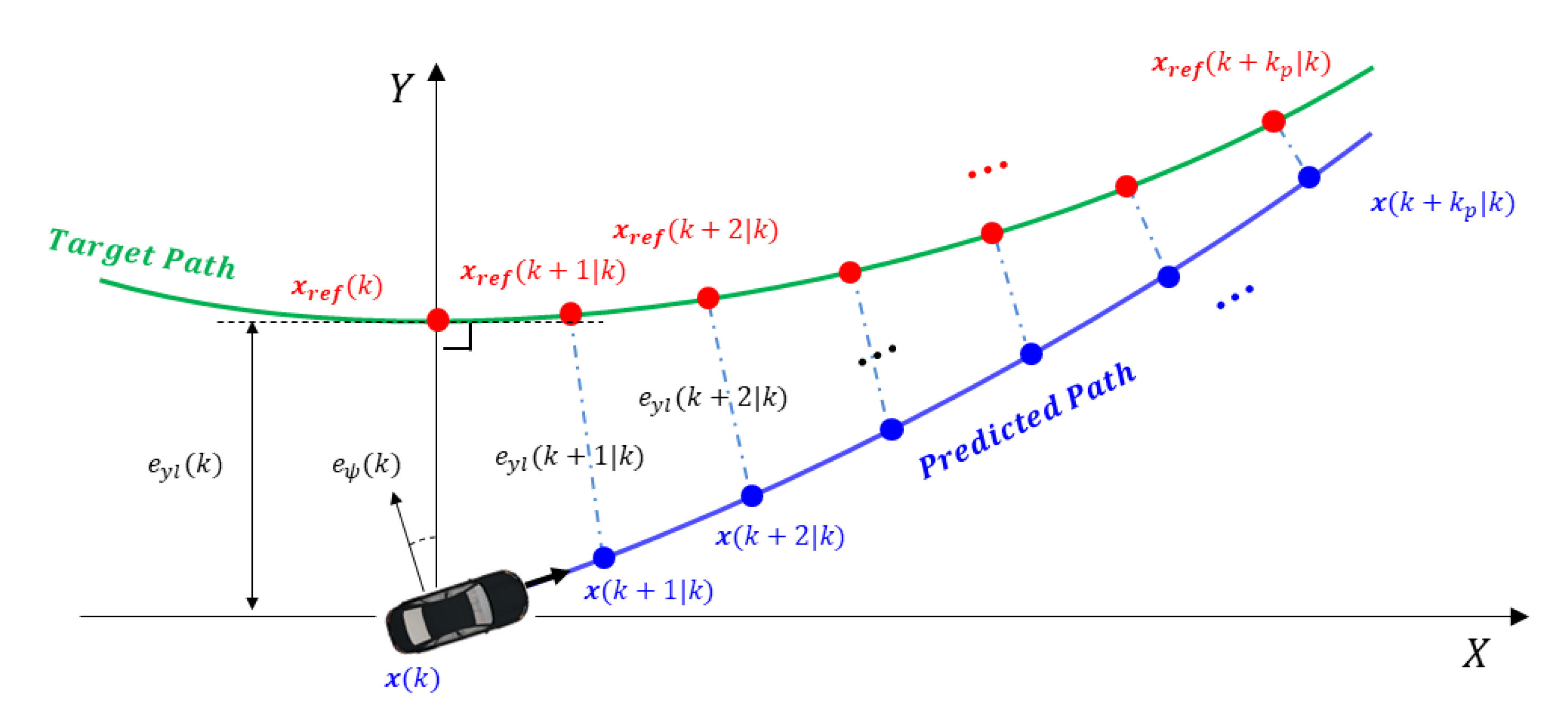
3.2. Lateral Controller
4. Chassis Controller
4.1. Upper Chassis Controller
4.2. Lower Chassis Controller—AFS and TV
4.2.1. AFS Control
4.2.2. Torque Vectoring Control
5. Simulation
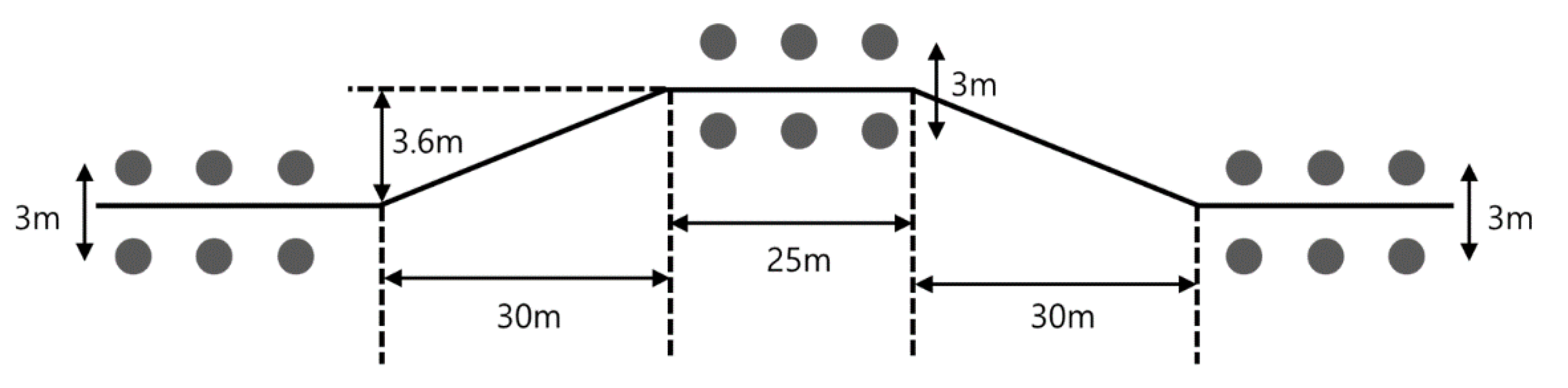
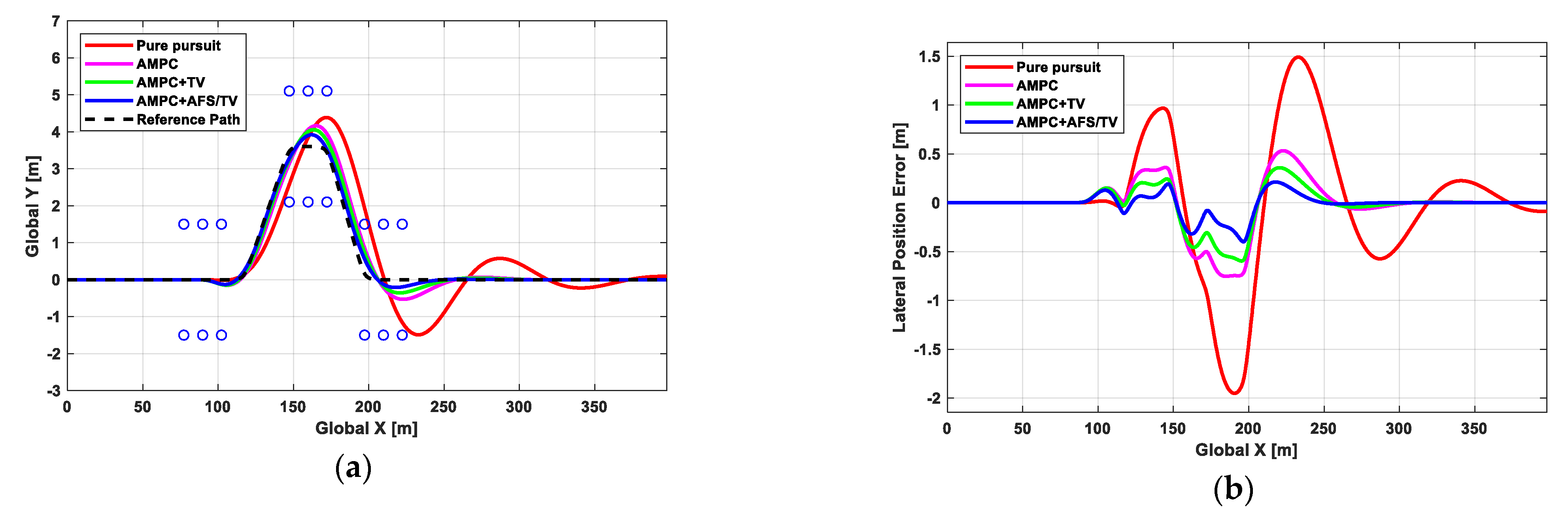
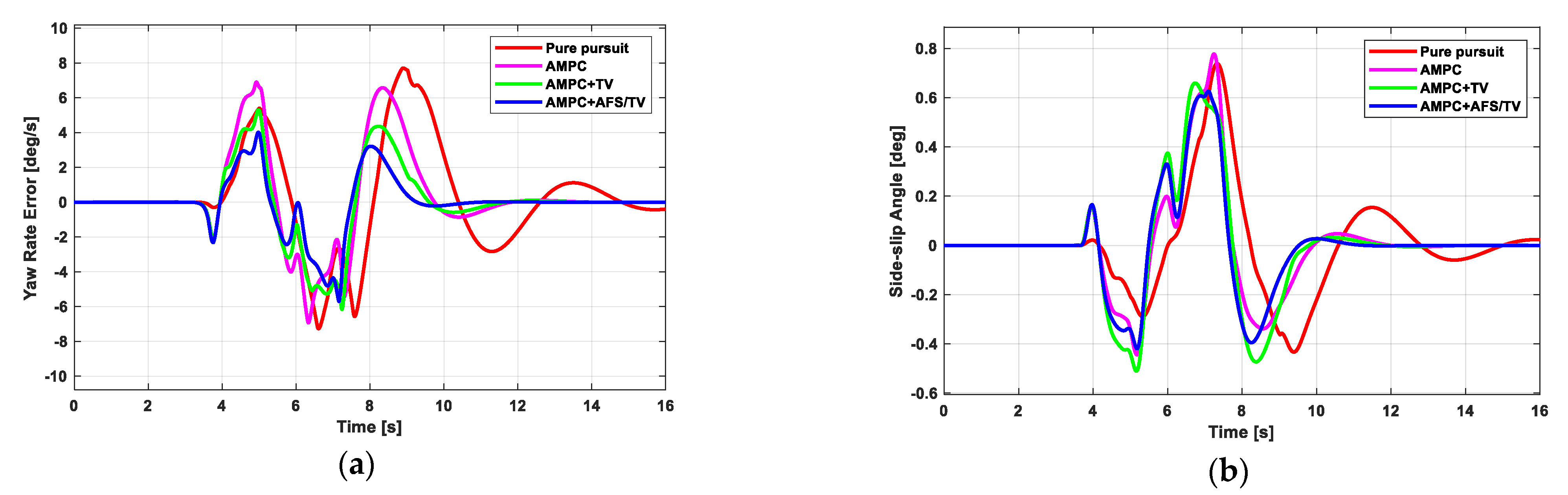
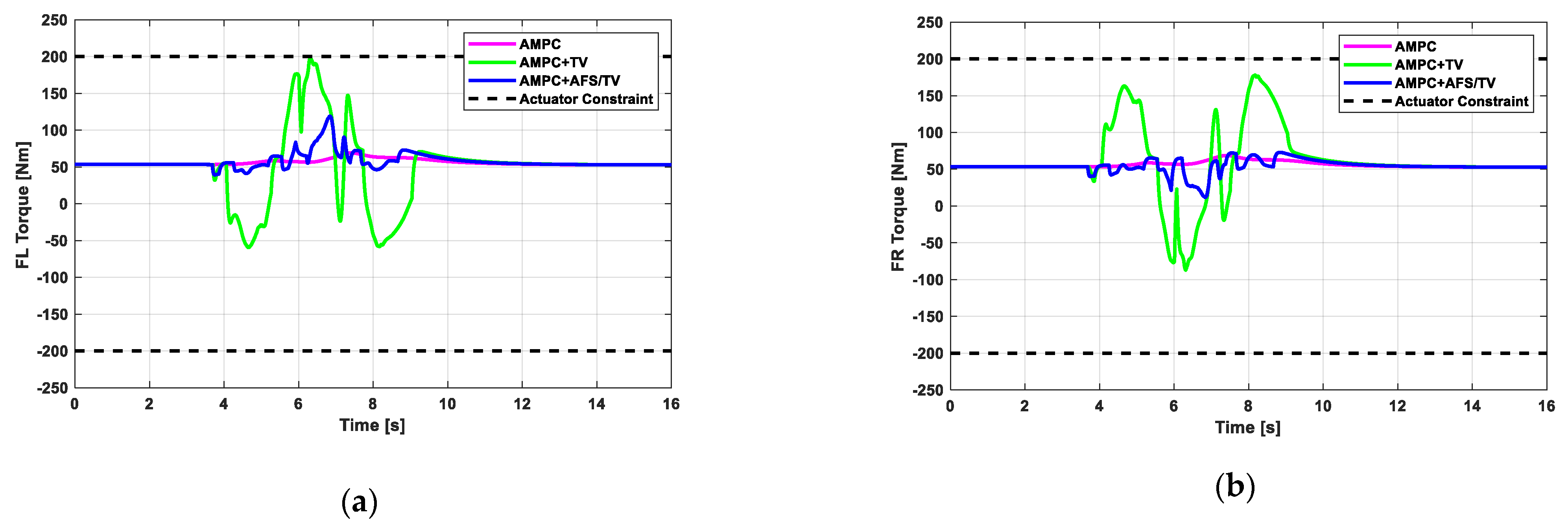
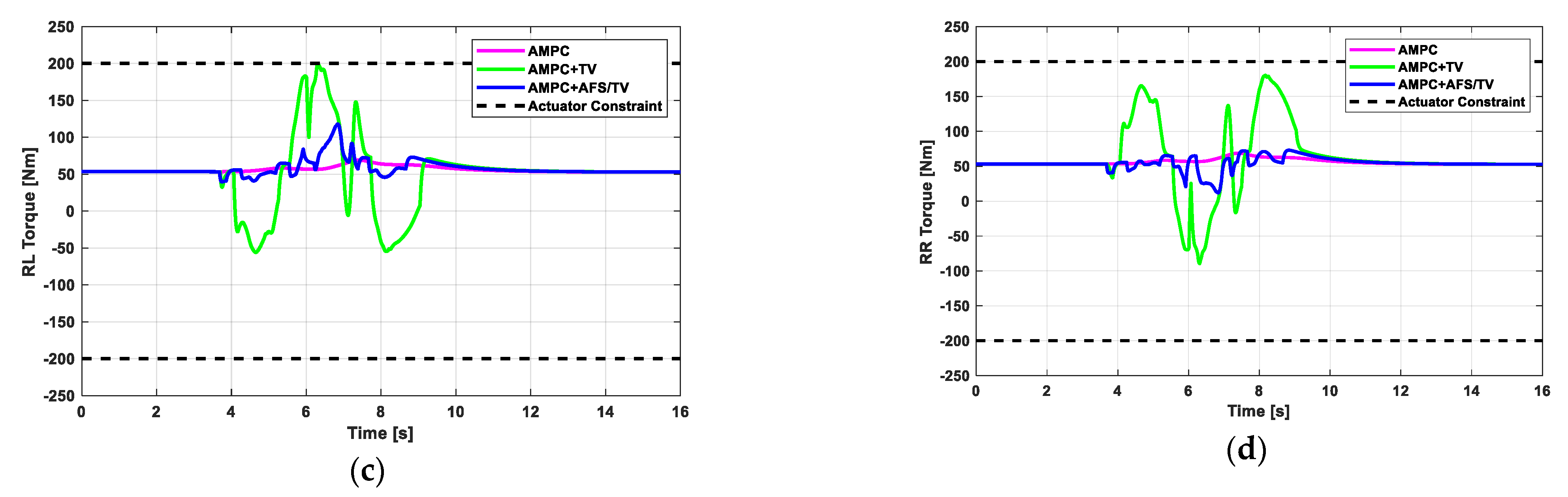
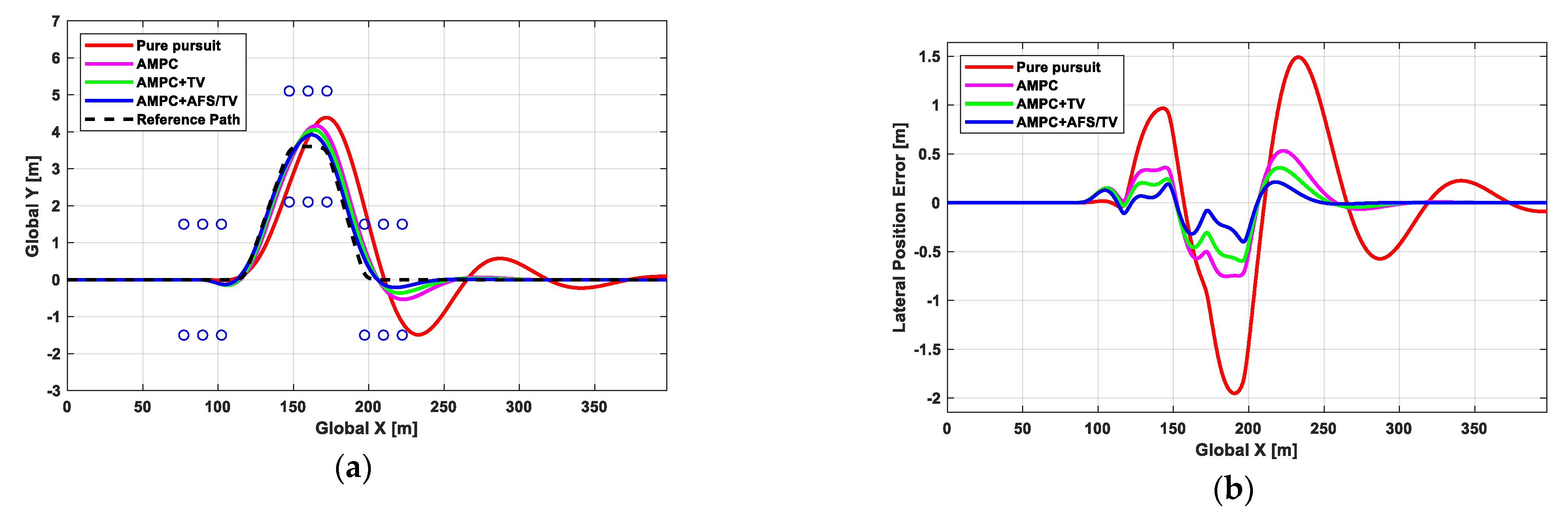
5.1. Scenario 1: Double Lane Change
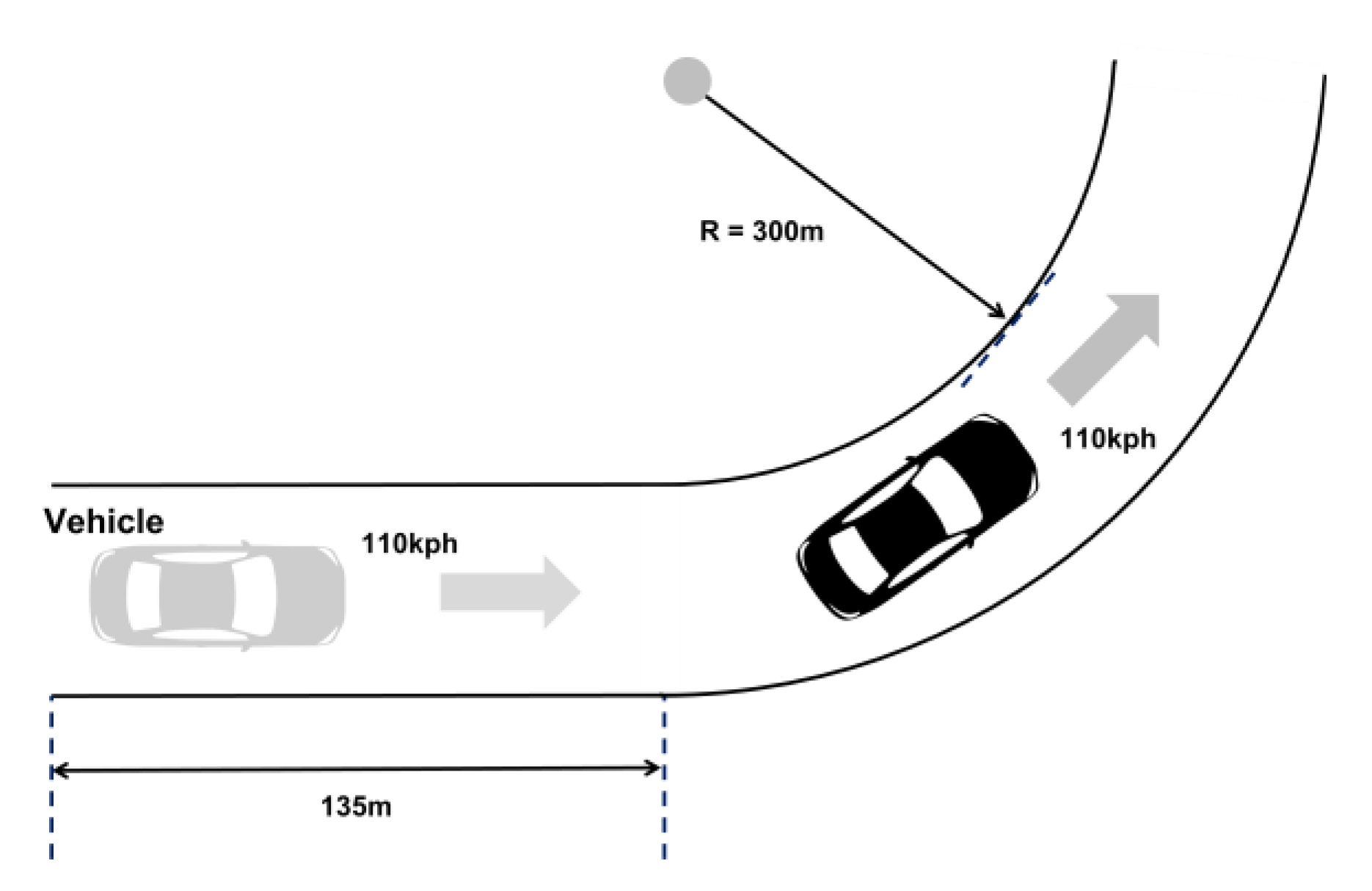
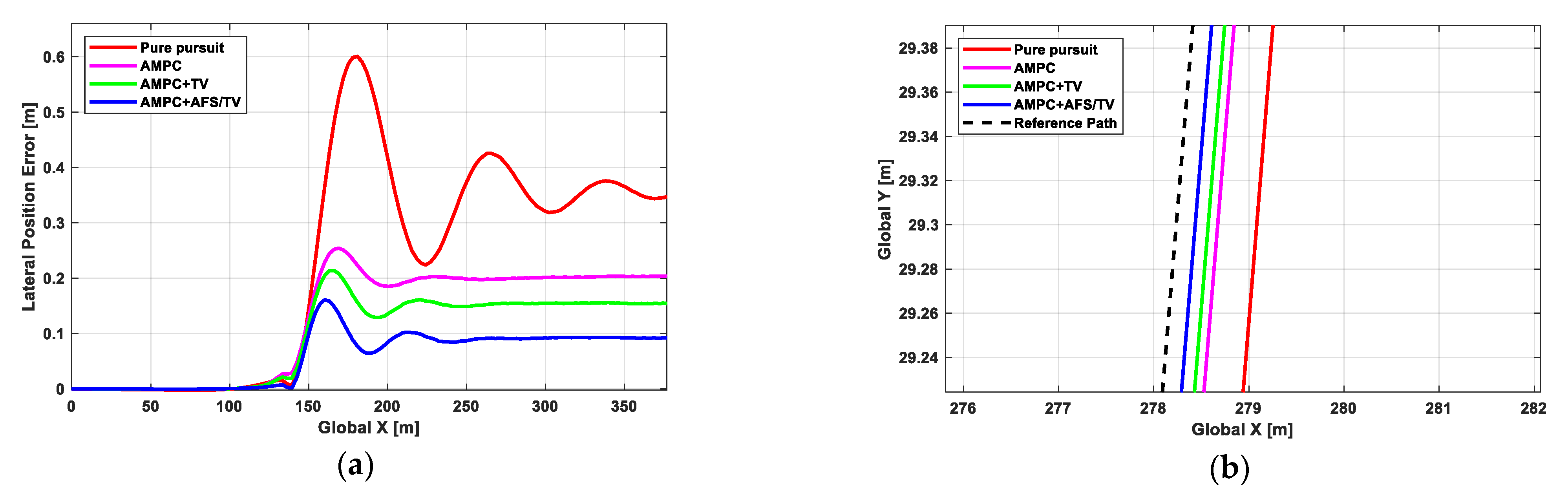
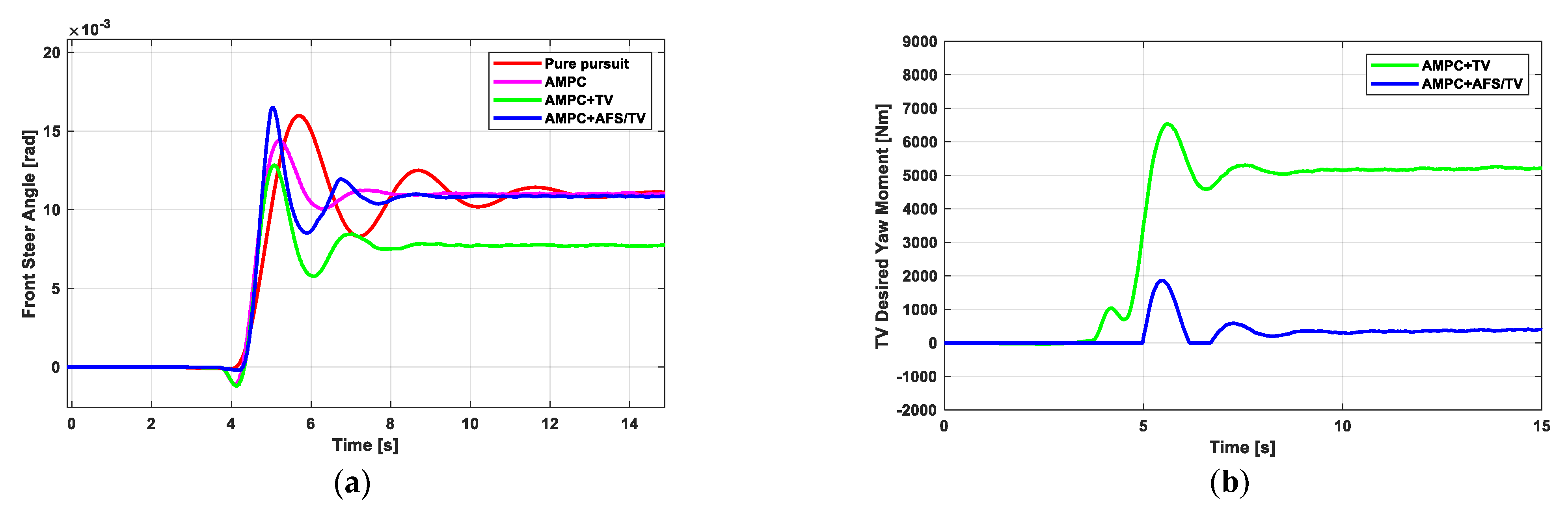
5.2. Scenario 2: High-Speed Circle Entry
5.3. Scenario 3: Single Lane Change (for Stability Analysis)
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| M | vehicle mass |
| distance from center of gravity to the front axle | |
| distance from center of gravity to the rear axle | |
| longitudinal vehicle speed | |
| yaw rate | |
| side-slip angle | |
| vehicle moment of inertia about z-axis | |
| the yaw moment acting on the vehicle body | |
| front steer angle | |
| front steer angle generated by AFS | |
| wheel slip angle of front tire | |
| wheel slip angle of rear tire | |
| cornering stiffness of front tire | |
| cornering stiffness of rear tire | |
| longitudinal tire force on front left tire | |
| longitudinal tire force on front right tire | |
| longitudinal tire force on rear left tire | |
| longitudinal tire force on rear right tire | |
| lateral tire force on front left tire | |
| lateral tire force on front right tire | |
| lateral tire force on rear left tire | |
| lateral tire force on rear right tire | |
| vertical tire force on front left tire | |
| vertical tire force on front right tire | |
| vertical tire force on rear left tire | |
| vertical tire force on rear right tire | |
| rotational moment of inertia of each wheel | |
| T | track width |
| wheel torque transmitted to the front left | |
| wheel torque transmitted to the front right | |
| wheel torque transmitted to the rear left | |
| wheel torque transmitted to the rear right | |
| gravitational acceleration | |
| road friction coefficient | |
| effective radius of the tire | |
| maximum torque of in-wheel motor | |
| longitudinal tire force on front left by TV | |
| longitudinal tire force on front right by TV | |
| longitudinal tire force on rear left by TV | |
| longitudinal tire force on rear right by TV | |
| in-wheel motor torque on front left by TV | |
| in-wheel motor torque on front right by TV | |
| in-wheel motor torque on rear left by TV | |
| in-wheel motor torque on rear right by TV |
References
- Andersen, H.; Chong, Z.J.; Eng, Y.H.; Pendleton, S.; Ang, M.H. Geometric path tracking algorithm for autonomous driving in pedestrian environment. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 1669–1674. [Google Scholar]
- Giesbrecht, J.; Mackay, D.; Collier, J.; Verret, S. Path tracking for unmanned ground vehicle navigation. DRDC Suffield TM 2005. Technical Memorandum 2005-224. [Google Scholar]
- Snider, J.M. Automatic Steering Methods for Autonomous Automobile Path Tracking; Robotics Institute: Pittsburgh, PA, USA, 2009; Tech. Rep. CMU-RITR-09-08. [Google Scholar]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The robot that won the DARPA Grand Challenge. J. Field Robot. 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Nguyen, A.-T.; Sentouh, C.; Zhang, H.; Popieul, J.-C. Fuzzy static output feedback control for path following of autonomous vehicles with transient performance improvements. Proc. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3069–3079. [Google Scholar] [CrossRef]
- Nguyen, A.-T.; Rath, J.; Guerra, T.-M.; Palhares, R.; Zhang, H. Robust set-invariance based fuzzy output tracking control for vehicle autonomous driving under uncertain lateral forces and steering constraints. In Proceedings of the 2020 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Glasgow, UK, 19–24 July 2020. [Google Scholar]
- Mashadi, B.; Mahmoodi-K, M.; Kakaee, A.H.; Hosseini, R. Vehicle path following control in the presence of driver inputs. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2013, 227, 115–132. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Luo, F.; Fang, S. Robust Control of a Four-Wheel-Independent-Steering Electric Vehicle for Path Tracking. SAE Int. J. Veh. Dyn. Stab. NVH 2017, 1, 307–316. [Google Scholar] [CrossRef]
- Burke, M. Path-following control of a velocity constrained tracked vehicle incorporating adaptive slip estimation. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 97–102. [Google Scholar]
- Sun, C.; Zhang, X.; Zhou, Q.; Tian, Y. A Model Predictive Controller with Switched Tracking Error for Autonomous Vehicle Path Tracking. IEEE Access 2019, 7, 53103–53114. [Google Scholar] [CrossRef]
- Ji, J.; Khajepour, A.; Melek, W.W.; Huang, Y. Path Planning and Tracking for Vehicle Collision Avoidance Based on Model Predictive Control With Multiconstraints. IEEE Trans. Veh. Technol. 2017, 66, 952–964. [Google Scholar] [CrossRef]
- Yoshida, H.; Shinohara, S.; Nagai, M. Lane change steering manoeuvre using model predictive control theory. Veh. Syst. Dyn. 2008, 46, 669–681. [Google Scholar] [CrossRef]
- Nam, H.; Choi, W.; Ahn, C. Model predictive control for evasive steering of an autonomous vehicle. Int. J. Automot. Technol. 2019, 20, 1033–1042. [Google Scholar] [CrossRef]
- Gao, Y.; Lin, T.; Borrelli, F.; Tseng, E.; Hrovat, D. Predictive control of autonomous ground vehicles with obstacle avoidance on slippery roads. In Proceedings of the ASME 2010 Dynamic Systems and Control Conference, American Society of Mechanical Engineers Digital Collection, Cambridge, MA, USA, 12–15 September 2010; pp. 265–272. [Google Scholar]
- Rafaila, R.C.; Livint, G. Nonlinear model predictive control of autonomous vehicle steering. In Proceedings of the 2015 19th International Conference on System Theory, Control and Computing (ICSTCC), Cheile Gradistei, Romania, 14–16 October 2015; pp. 466–471. [Google Scholar]
- Findeisen, R.; Allgöwer, F. An introduction to nonlinear model predictive control. In Proceedings of the 21st Benelux Meeting on Systems and Control, Eindhoven, The Netherlands, 19–21 March 2002; pp. 119–141. [Google Scholar]
- Lin, F.; Chen, Y.; Zhao, Y.; Wang, S. Path tracking of autonomous vehicle based on adaptive model predictive control. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419880089. [Google Scholar] [CrossRef]
- Ercan, Z.; Gokasan, M.; Borrelli, F. An adaptive and predictive controller design for lateral control of an autonomous vehicle. In Proceedings of the 2017 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Vienna, Austria, 27–28 June 2017; pp. 13–18. [Google Scholar]
- Petersson, I.; Risö, J. Automotive Path Following Using Model Predictive Control. Master’s Thesis, Chalmers University of Technology, Göteborg, Sweden, 2014. [Google Scholar]
- Yim, S.; Kim, S.; Yun, H. Coordinated control with electronic stability control and active front steering using the optimum yaw moment distribution under a lateral force constraint on the active front steering. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 230, 581–592. [Google Scholar] [CrossRef]
- Zhang, J.; Li, J. Integrated vehicle chassis control for active front steering and direct yaw moment control based on hierarchical structure. Trans. Inst. Meas. Control 2019, 41, 2428–2440. [Google Scholar] [CrossRef]
- Cho, W.; Yoon, J.; Kim, J.; Hur, J.; Yi, K. An investigation into unified chassis control scheme for optimised vehicle stability and manoeuvrability. Veh. Syst. Dyn. 2008, 46, 87–105. [Google Scholar] [CrossRef]
- Kang, J.; Heo, H. Control Allocation based Optimal Torque Vectoring for 4WD Electric Vehicle; 0148-7191; SAE Technical Paper: Warrendale, PA, USA, 2012. [Google Scholar]
- Ando, N.; Fujimoto, H. Yaw-rate control for electric vehicle with active front/rear steering and driving/braking force distribution of rear wheels. In Proceedings of the 2010 11th IEEE International Workshop on Advanced Motion Control (AMC), Nagaoka, Niigata, Japan, 21–24 March 2010; pp. 726–731. [Google Scholar]
- Osborn, R.P.; Shim, T. Independent control of all-wheel-drive torque distribution. Veh. Syst. Dyn. 2006, 44, 529–546. [Google Scholar] [CrossRef]
- Zhang, X.; Göhlich, D.; Zheng, W. Karush–Kuhn–Tuckert based global optimization algorithm design for solving stability torque allocation of distributed drive electric vehicles. J. Frankl. Inst. 2017, 354, 8134–8155. [Google Scholar] [CrossRef]
- Shino, M.; Nagai, M. Yaw-moment control of electric vehicle for improving handling and stability. JSAE Rev. 2001, 22, 473–480. [Google Scholar] [CrossRef]
- Hori, Y. Future vehicle driven by electricity and control-research on four wheel motored “UOT Electric March II”. In Proceedings of the 7th International Workshop on Advanced Motion Control. Proceedings (Cat. No. 02TH8623), Maribor, Slovenia, 3–5 July 2002; pp. 1–14. [Google Scholar]
- Abe, M. Vehicle Handling Dynamics: Theory and Application; Butterworth-Heinemann: Burlington, MA, USA, 2015. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Willis, M.J.; Tham, M.T. Advanced Process Control; Department of Chemical and Process Engineering, University of Newcastle upon Tyne; University of Newcastle upon Tyne: Tyne, UK, 1994. [Google Scholar]
- Breuer, J.J. Analysis of driver-vehicle-interactions in an evasive manoeuvre-results of’moose test’studies. In Proceedings of the 16th International Technical Conference on the Enhanced Safety of Vehicles, Windsor, ON, Canada, 31 May–4 June 1998. [Google Scholar]
- CarMaker. User’s Guide Version 8.0; IPG Automotive: Karlsruhe, Germany, 2019. [Google Scholar]
- MathWorks. Simulink User’s Guide; The MathWorks Inc.: Natick, MA, USA, 2018. [Google Scholar]
- Zhang, H.; Li, X.-S.; Shi, S.-M.; Liu, H.-F.; Guan, R.; Liu, L. Phase plane analysis for vehicle handling and stability. Int. J. Comput. Intell. Syst. 2011, 4, 1179–1186. [Google Scholar] [CrossRef]
- Nguyen, V. Vehicle Handling, Stability, and Bifurcaiton Analysis for Nonlinear Vehicle Models. Master’s Thesis, University of Maryland, Maryland, DC, USA, 2005. [Google Scholar]
- Inagaki, S.; Kushiro, I.; Yamamoto, M. Analysis on vehicle stability in critical cornering using phase-plane method. JSAE Rev. 1995, 2, 216. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| (kg) | 2108 |
| (N/rad) | 127,100 |
| (N/rad) | 12,700 |
| () | 3594.29 |
| (m) | 1.47 |
| (m) | 1.5 |
| (m) | 1.66 |
| (m) | 1.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahn, T.; Lee, Y.; Park, K. Design of Integrated Autonomous Driving Control System That Incorporates Chassis Controllers for Improving Path Tracking Performance and Vehicle Stability. Electronics 2021, 10, 144. https://doi.org/10.3390/electronics10020144
Ahn T, Lee Y, Park K. Design of Integrated Autonomous Driving Control System That Incorporates Chassis Controllers for Improving Path Tracking Performance and Vehicle Stability. Electronics. 2021; 10(2):144. https://doi.org/10.3390/electronics10020144
Chicago/Turabian StyleAhn, Taewon, Yongki Lee, and Kihong Park. 2021. "Design of Integrated Autonomous Driving Control System That Incorporates Chassis Controllers for Improving Path Tracking Performance and Vehicle Stability" Electronics 10, no. 2: 144. https://doi.org/10.3390/electronics10020144
APA StyleAhn, T., Lee, Y., & Park, K. (2021). Design of Integrated Autonomous Driving Control System That Incorporates Chassis Controllers for Improving Path Tracking Performance and Vehicle Stability. Electronics, 10(2), 144. https://doi.org/10.3390/electronics10020144