Abstract
Wireless sensor networks (WSNs) are usually deployed to different areas of interest to sense phenomena, process sensed data, and take actions accordingly. The networks are integrated with many advanced technologies to be able to fulfill their tasks that is becoming more and more complicated. These networks tend to connect to multimedia networks and to process huge data over long distances. Due to the limited resources of static sensor nodes, WSNs need to cooperate with mobile robots such as unmanned ground vehicles (UGVs), or unmanned aerial vehicles (UAVs) in their developments. The mobile devices show their maneuverability, computational and energy-storage abilities to support WSNs in multimedia networks. This paper addresses a comprehensive survey of almost scenarios utilizing UAVs and UGVs with strogly emphasising on UAVs for data collection in WSNs. Either UGVs or UAVs can collect data from static sensor nodes in the monitoring fields. UAVs can either work alone to collect data or can cooperate with other UAVs to increase their coverage in their working fields. Different techniques to support the UAVs are addressed in this survey. Communication links, control algorithms, network structures and different mechanisms are provided and compared. Energy consumption or transportation cost for such scenarios are considered. Opening issues and challenges are provided and suggested for the future developments.
1. Introduction
Wireless sensor networks (WSNs) facilitate a numerous applications in different fields, including environment monitoring, health care, military, inter-vehicular, infrastructure monitoring, etc. [1,2]. However, saving energy in such networks is always a critical issue since the networks only operate based on pre-charged batteries which are small and inexpensive [3,4]. The static sensor nodes would stop working and cause disconnection among the networks if they deplete all their energy storage. This motivates many researchers to work on this issue. There are many approaches that aim to reduce energy consumption for the networks, including data processing, battery management, energy harvesting, sensor distribution, especially, energy-efficient routing methods to save energy for prolonging the network lifetime [5,6,7].
Data collection methods have been well exploited in the literature review. Routing mechanisms including random walk [8], tree-based routing [9], cluster-based [10], shortest paths [11], etc., have been considered to find the best solutions for saving energy in data routing in such networks. These methods attempt to reduce the number of hops in routing, and also to reduce communication distances, etc., that lead to reducing energy consumption in WSNs. In addition, some advanced data processing algorithms are also integrated into the routing methods that aim to reduce the sensing data collected from the networks to be sent to the base station (BS) [12,13]. Compressed sensing techniques [14] are applied in WSNs that can combine with conventional mechanisms, significantly reduce the amount of sensing data to be sent to the BS [15,16]. Other methods exploited the high correlation of sensing data to compress and to send only a certain number of measurements to the BS [17,18]. All of these methods aim to reduce the total energy consumption in such networks. However, the sensor nodes are often small, inexpensive, and low in computational capacity. Hence, they still are not capable of making long-distance communications to the BS in various cases.
In order to support the static sensors, mobile sensors or mobile robots are deployed into the networks to assist the static sensor nodes in collecting data more efficiently [19,20]. There are different scenarios for mobile robots working in sensing fields and assisting static sensor nodes; (i) A certain number of the mobile robots are deployed in a sensing area to collect data to be sent to a BS [21]; (ii) Mobile robots collect data from sensor nodes and also for their own, then finally send the whole data to the BS [22]. This exploits the maneuverability of mobile robots to measure data from some regions that static sensors might not reach and also to save energy for static sensors with the burden of huge data transmission in multiple hop routing. These mobile robots also operate based on pre-charged batteries which are limited. In some some scenarios, when a data processing center or BS is very far from the sensing regions, the robots cannot perform long-distance communications [23] that may cause disconnections or packet loss.
In order to address concerns about data transmission for long distances and time responses, unmanned aerial vehicles (UAVs) are proposed to assist the WSNs for data collection problems. In particular, the UAVs can be used as aerial BSs to enhance capacity, reliability, coverage, and energy efficiency of wireless networks with their inherent features such as mobility, flexibility, and adaptive altitude [24,25]. In addition to many different roles in communication networks, specifically in WSNs, UAVs can either collect data directly from sensor nodes or receive measurements from UGVs. The authors in [26] propose a priority-based frame selection scheme to deal with the number of unnecessary information transference between sensor nodes and UAVs. The authors introduced a novel routing protocol based on the priority-based frame selection scheme to minimize the networks’ energy consumption. The results show that the transmission distances from transceivers to receivers are reduced. A cloud-assisted data gathering strategy is proposed to improve the performance of UAVs-based WSNs [27]. By using a cloud-assisted approach, authors obtain optimal flying path and data acquisition for UAVs. The results from simulation and experiment show that the proposed approach outperforms the traditional one in terms of energy efficiency, flying time, transmitting distances, and delay of data collection. A UAV-WSN cooperation scheme is proposed in [28]. The UAVs modify their flight path to achieve more efficient data collection by using the feedback information from WSNs. The study in [29] tackles problems of UAV data collection in mobile WSNs which is the dynamic network topology. Mobile sensors travel along a predefined trajectory with a velocity which is a constant. A UAV flies above and wirelessly collects data from sensors. The authors investigated four data collection algorithms considering the multi-data-rate transmissions (DR) and the contact duration time (CDT). The proposed algorithms outperform conventional algorithms. A generic framework for autonomous navigation and scheduling is proposed in [30,31]. The framework combined two Reinforcement Learning (RL)-based frameworks for navigating and scheduling UAVs to minimize data collection time. In [32], the data collection problems in WSNs utilizing UAVs are studied and exploited. The sensing field is divided into multiple regions. Flying paths for UAVs are generated so that the UAV can entirely cover the sensing regions. The UAV-assisted networks either significantly support WSNs in data collection or provide more real-world applications such as 3D mapping in urban environments with obstacles [33]. In addition, the UAVs are equipped/integrated with cameras, advanced control algorithms to provide more potential applications and significant results [34,35].
In brief, this hybrid kind of data collection method not only features the flexibility of motile data collection which is suitable for large-scale WSNs but also mainly has advantages, such as the following.
- Firstly, UAVs can be deployed in variable environments. Aerial data collection methods use the UAVs that could be navigated automatically as the mobile data collectors. UAVs are not limited to mobility like ground transportation and could be used in particular monitored regions, which humans could not approach.
- Secondly, aerial data collection is much quicker than ground data collection. Aerial data collection uses UAVs that have a greater speed of movement. It could increase the speed of searching and visiting nodes to shorten the life cycle of data collection when the WSN is a large-scale one.
- Thirdly, using UAV-assisted data collection will have lower latency and higher bandwidth. Aerial data collection often has fewer obstacles and larger coverage of wireless signals than ground data collection. Therefore, it could lower the communication latency and increase the bandwidth.
- Finally, while applying UAV data collection mechanisms, sensor nodes or relaying nodes only have to transmit data at short distances, the total energy consumption is significantly reduced.
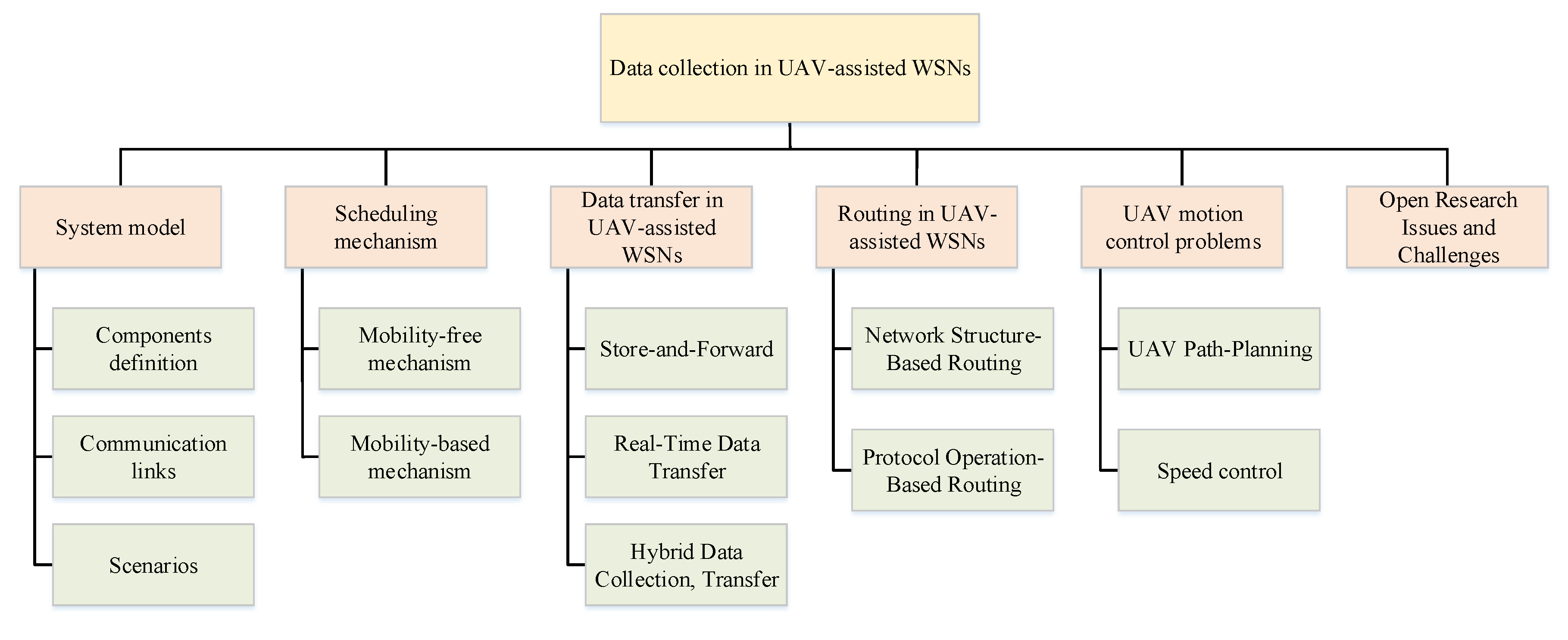
Aerial data collection brings users many benefits as mentioned above. This can be applied for collecting data in a large-scale WSN. However, exploiting aerial mobility in WSNs also leaves critical challenges that need to be solved. In this paper, we classify the literature review of UAV-assisted data collection schemes in WSNs following Figure 1. We focus on the effectiveness of using UAVs on data routing in the networks. Different problems in scheduling mechanisms, data transfer models, routing protocols, and impacts of UAV mobility patterns are considered. This survey aims to analyze key aspects of UAV-assisted WSN operations that hopefully could result in a reference for the implementation of data UAV-based data collection in WSNs.
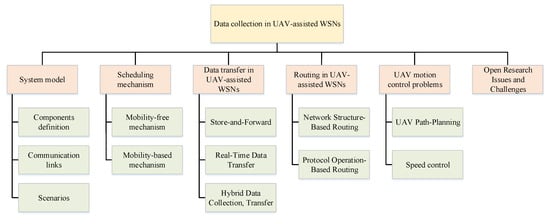
Figure 1.
Detailed Structure of the Survey.
The rest of the paper is organized as follows. Section 2 describes the system models that would be used in the most existing data collection scenarios. Section 3 presents in detail scheduling mechanisms. Section 4 provides data transfer in UAV-assisted WSNs. Section 5 addresses routing problems in UAV-assisted WSNs. Section 6 provides UAV motion control problems. Section 7 propounds open research issues and challenges. Finally, conclusions and future developments are addressed in Section 8.
2. System Models
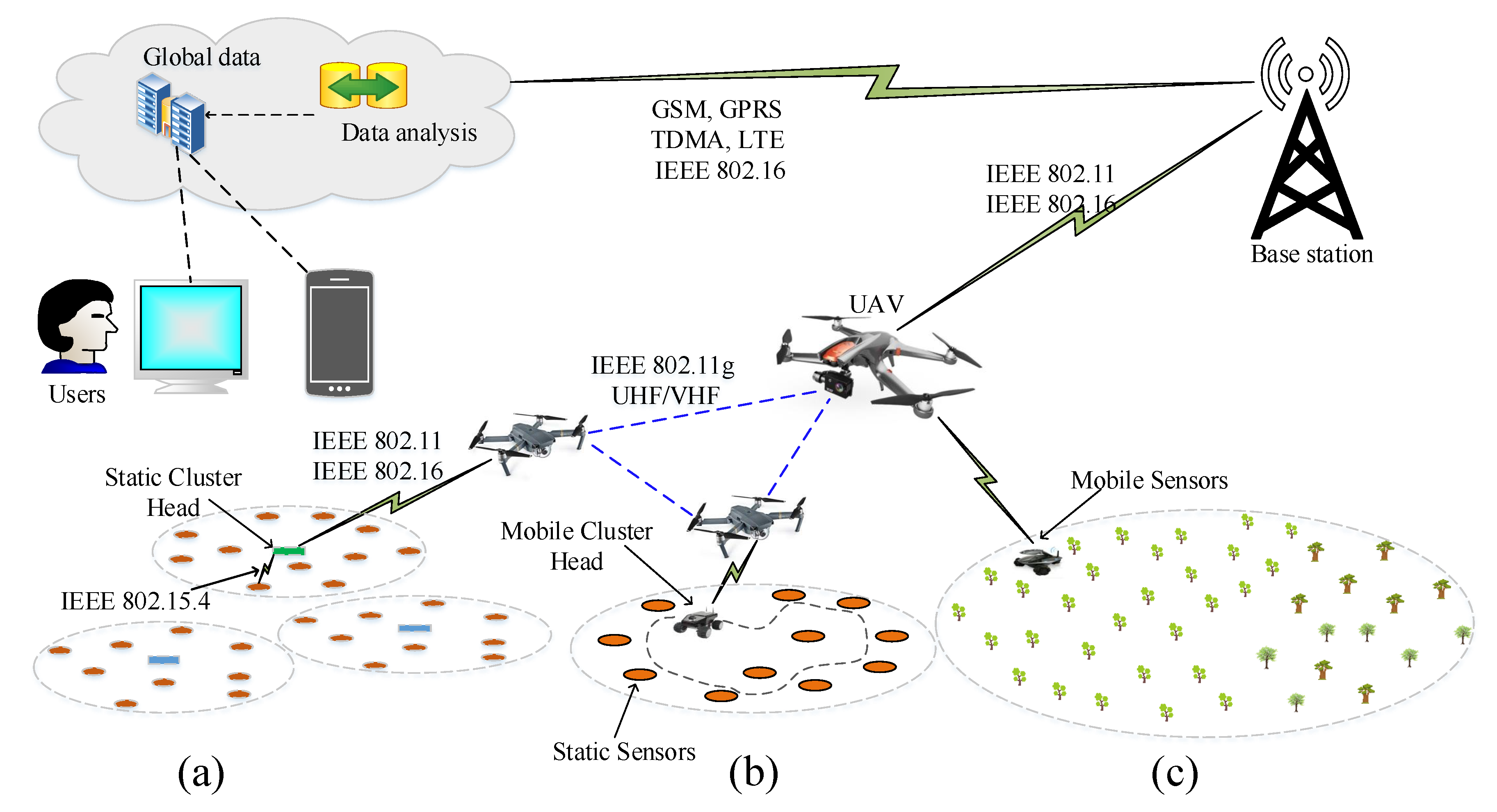
The usage of UAVs in WSNs to fulfill different tasks such as collecting data in real-time and surveillance is becoming popular. Our system model mainly focuses on the support of multiple UAV-assisted data collection that is shown in Figure 2. There are many scenarios when using UAVs to support data collection and data processing in WSNs. As shown in the figure, the model mainly categories in three scenarios; (a) UAVs can communicate directly with either static sensors nodes or static cluster head (CH); (b) UAVs connect to mobile CHs; (c) UAVs connect to the mobile sensors or UGVs in sensing fields. In each scenario, the UAVs use different network architectures. Sensing data collected by the UAVs are finally transmitted to a ground base station (BS) and a cloud server. Users can access and exploit the data depending on their authority. These models lead to many advantages such as ensuring real-time data, and deploying at the large network scale.
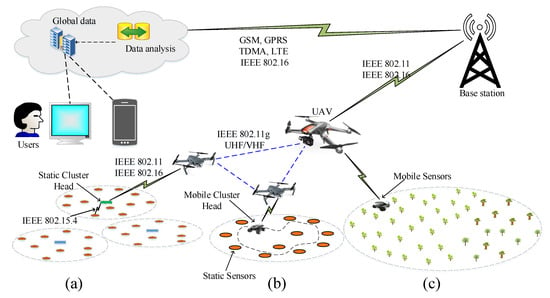
Figure 2.
Multi-UAV-assisted data collection in WSNs.
As shown in Figure 2, UAVs are connected as a UAV network which has the full essence of a wireless communication network such as routing protocols, communication protocols [36]. All the network elements with their functions are addressed as follows.
2.1. Basic Definitions of System Elements
Sensor nodes (SNs): this is the basic component responsible for collecting or measuring data directly in WSNs. Each SN measures sensing data for its own. Depending on a sensor network model, it follows a predefined routing algorithm to forward its data to a relaying node, a CH, or a BS. Distributed SNs may operate to create flexible routes to send their data to the next destinations that depends on the system setup.
Relay nodes (RNs): RNs are important components in large-scale WSNs. RNs are responsible for collecting data from the SNs. RNs can perform various functions such as data compression and data routing, while collecting data. Each RN has a memory buffer that stores the received data from the SNs. Finally, the data would be transmitted to UAVs when the UAVs reach the positions within their transmission ranges. The data transmission between RNs to UAVs can be completed based on a pre-scheduled cycle. Therefore, the RNs may not need to be placed within the others’ communication ranges.
Unmanned aerial vehicles (UAVs): these devices may be considered as mobile sink nodes. They collect data from RNs when they are within communication distance and then transmit the data to the BS. The UAVs can also perform a few other functions such as providing control information and configuration information to the RNs. In addition, UAVs have a Global Positioning System (GPS) which is easily used to provide synchronization and localization information of the RNs and SNs. This information is essential for routing algorithms for SNs-to-RNs and RNs-to-UAVs data transmission.
Sink Nodes: UAVs collect data from RNs and forward it to sink nodes or Base stations (BSs). The sink nodes or BSs often use available communication technologies in that area, such as WiMax, General Packet Radio Service (GPRS), Cellular, etc., for communications. In some case, the sink nodes are located at both ends of the Linear Sensor Networks (LSNs). The length of LSNs can span hundreds of thousands of meters. This length of LSNs is divided into several small segments. In this case, an appropriate model would use an UAV that travels back and forth to collect data between two sink nodes.
2.2. Communication Links
Communication links can use different protocols and various communication techniques, as shown in Figure 2. In general, there are three types of links in UAV-assisted WSNs including sensors to cluster heads, UAVs to ground stations, and UAVs to UAVs, as shown in Table 1. This presents different technologies and shows they are utilized at each level of architecture.

Table 1.
Common communication technologies for UAV-assisted WSNs data collection.
Sensor Nodes communicating to Relay Nodes links [37,38]: In order to achieve connectivity between SNs and RNs, some protocols which have characteristics such as short communication distance, low energy, low data rate are often used. Typically, the IEEE 802.15.4 standard can be used at the physical and data link layers. The associated data rate for this protocol is typically less than 1 Mbps. In real applications, and in video and audio transmission applications, high data transmission rates are required. Therefore, the IEEE 802.15.3 communication standard which has a transmission rate of up to 55 Mbps [39] can meet the demand of large data transmission from SN to RL in case of the SNs require. Any multidirectional routing protocol utilized in WSNs is suitable for the link between the SN and the RN.
Relay Nodes-to-UAV and UAV-to-Sink links [40,41,42,43]: Communication standards that have medium transmission distances such as IEEE802.11 (WiFi) are suitable for connections between RNs and UAVs or UAVs and Sinks. The communication standard has communication distances from 100 m to several hundred meters, and transfer rates from 1 Mbps to 54 Mbps. Standard IEEE 802.16 has a speed of up to 70 Mbps. Hence, it is suitable for UAVs operating at high altitudes of several kilometers. The model of the transmission channel between the UAV with height h and coverage radius R and the ground stations is mentioned in the paper [44]. The path loss will be calculated according to the formula:
where is the probability to get line of sight (LOS) at angle , P(NLOS) is the probability to get non-line of sight (NLOS) at angle , is the angle between the antenna of the UAV and the antenna of the ground station, and are the path loss for line of sight and non-line of sight path, and is a constant, is the carrier frequency, d is the distance between the UAV and the ground station, c is the flight speed of the UAV, and are contingency loss.
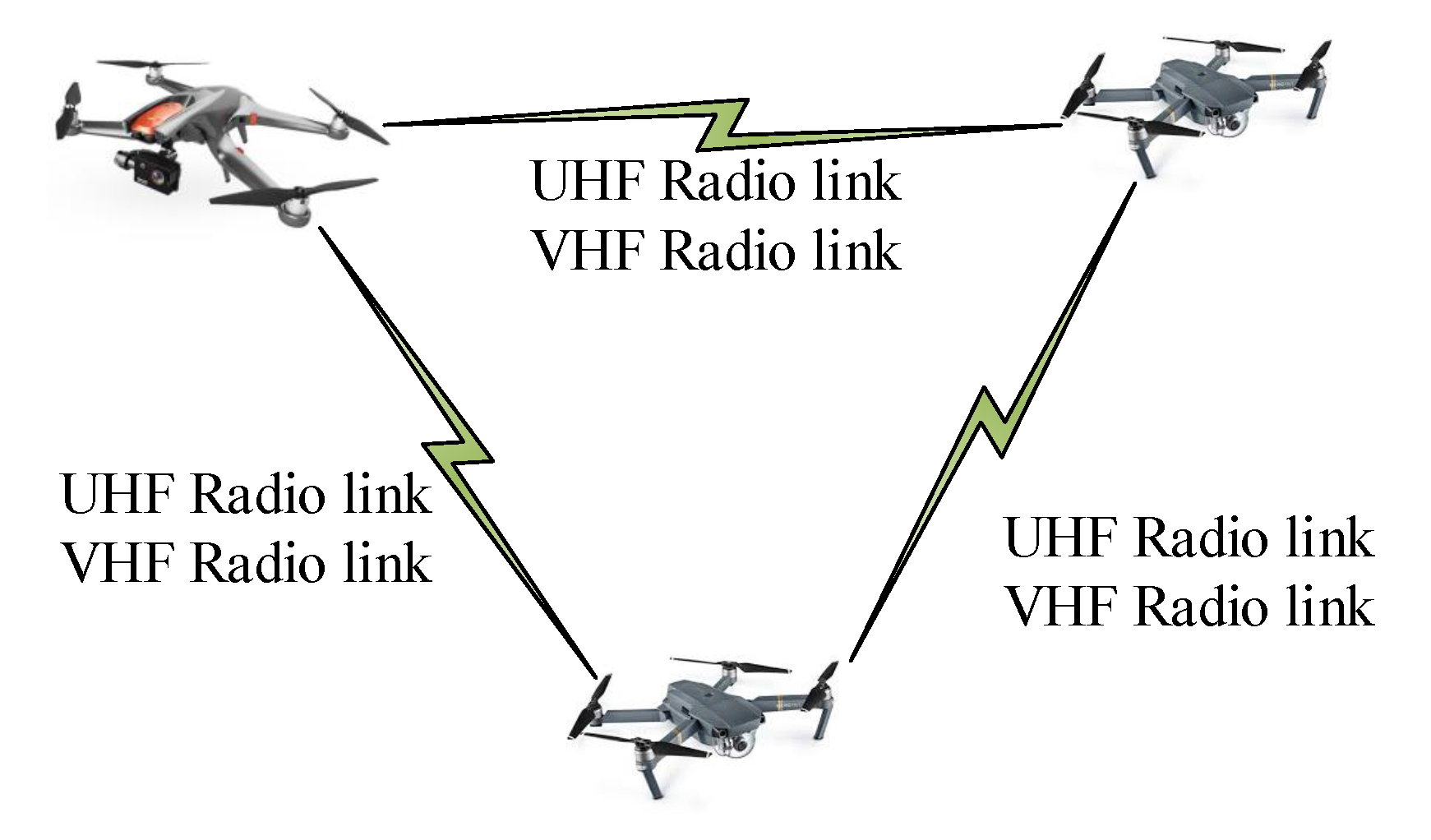
UAVs-to-UAVs communication links [45,46]: Collaborative communications are important in a group of the UAVs for networking assistance and service components, as shown in the Figure 3. They can share/exchange or forward data to each other. The UAVs use a variety of communication technologies to communicate among them or with other systems, such as the Ground Control Stations (GCS), WSNs, and on-ground mobile robots. Similarly, we have the model of the communication channel between UAVs and UAVs presented in the paper [47].
the path loss can be calculated according to paper [47] as
where is the transmitter power, and are the gain of the transmit and receive antennas, respectively, is the wavelength, d is the distance between two UAVs.

Figure 3.
UAVs to UAVs.
Sink-to-Network Control Center (NCC) links [48]: The connections between the sink nodes and the network control center (NCC) can utilize existing infrastructure in the regions where the sink is located. For instance, the areas that have available telecommunications network infrastructure such as LTE, GSM. They will utilize them for data transmission with communication speed and standards according to each available communication technology.
There are many different transmission channel models for the different types of areas, each channel model will be suitable for the characteristics of each operating area, as mentioned in [49], for example, the model of channel transmission in urban areas is presented in [50]. In the paper, the author studies, and tests the channel model of radio communication in the urban environment. To experiment with the wave propagation model in different environments, the suburban radio propagation model was proposed in [51]. Moreover, in [52], the author proposed a transmission channel model to realize wireless communication between vehicles and communication infrastructure in rural environments.
2.3. Data Collection Scenarios
Various UAV-based architectures for data collection in WSNs have been exploited in different scenarios. The most existing studies can be classified as follows.
- UAVs collect data from static sensors: In this architecture, UAVs collect data from static sensor nodes on the ground. In [43], sensing data from sensors are directly sent to UAVs. A reliable communication protocol is proposed to maximize the number of sensors that can transmit data at one time. The authors in [53] exploit a multiple-UAVs system to collect data from sensors. An algorithm called IBA-IP (Iterative Balanced Assignment with Integer Programming) is proposed to determine optimal initial positions for UAVs and sensor assignment to UAVs. In [54], a data collection scheme is proposed in which UAVs collect data from cluster heads. The cluster heads receive data from all cluster members and then send to UAVs. The UAVs can retrieve information about the whole network only by collecting data from several cluster heads. This scheme reduces the flying paths for UAVs as UAVs do not need to cover all sensors.
- UAVs collect data from mobile cluster heads: the Scalable Energy-efficient Asynchronous Dissemination (SEAD) is another option for routing sensing data to mobile sinks or mobile cluster heads [55]. The idea is to build a minimum Steiner tree for the mobile sinks or relay nodes. The access points are created from some nodes in the tree. Each mobile sink registers itself with the nearest access node. When the mobile agent moves out of the access node’s communication range, the route is extended to the new access point. In [56,57,58], the authors propose a data collection algorithm in a WSN utilizing a mobile cluster head and UAV. They integrate both communication devices as UAVs and mobile agents to save time and energy for sensor nodes.
- UAVs collect data from mobile sensors: currently, we have many different applications that require mobile sensor nodes in a certain area such as rescuing in the wilderness where targets are movable objects [29]. In the paper, four data collection algorithms are proposed for mobile WSNs assisted by UAVs. This work only considers the case that UAVs and mobile sensors move along a pre-defined straight path with constant velocities. The authors in [59] propose an optimization-based model to optimally deploy UAVs for mobile sensor coverage problems. The deployment of UAVs based on this method shows the effectiveness in fully coverage mobile sensors while ensuring a multi-hop communication channel for collecting data from mobile sensors to base stations.
3. Scheduling Mechanisms
Typical devices deployed in WSNs have limited energy storage due to small batteries. The data transmission procedures normally consume high energy from the sensors [60]. Scheduling mechanisms have been widely studied as potential approaches for energy-saving purposes as shown in Figure 4. Devices in WSNs are scheduled to change their working conditions, including active, inactive (sleeping), or idle, etc., for further energy saving. Sensor nodes work in active mode when they need to communicate with sinks or data collectors to exchange information. Otherwise, they turn inactive or idle modes to preserve energy. In UAV-assisted WSNs, UAVs play a role as mobile sinks. Scheduling plans sensors should be designed carefully to synchronize with the presence of mobile sinks. In this section, scheduling problems for WSNs with the presence of mobile sinks are investigated. Generally, scheduling mechanisms can be categorized based on the dependence in the mobility of mobile sinks, which are mobility-free and mobility-based mechanisms.
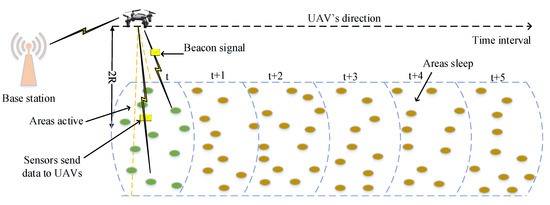
Figure 4.
On-demand scheduled mechanism.
3.1. Mobility-Free Mechanism
In paper [61], a mobility-free mechanism can be categorized into three smaller groups, namely, strictly, loosely, and on-demand scheduled as follows.
In the strictly schedules, the transition between active and inactive operation has to be strictly planned so that sensor nodes can wake up at a time that mobile sinks are in their communication ranges. After transferring sensing data to UAVs, sensor nodes turn back to inactive modes until the next scheduled time slots. The authors in [62] implement this schedule mechanism to plan working operations for sensor nodes. Sensors use initial information about the positions of mobile sinks and their own to estimate the times when mobile sinks come into communication regions. Sensors can wake up to transfer sensing data at the predicted time. In paper [63], the relation between wake-up schedules of sensor nodes and trajectories of UAVs are studied as optimal problems that aim to minimize the system energy consumption. Comparing to other mechanisms, the strict schedule is quite simple to implement. Due to the strict schedule, both mobile sinks and sensor nodes must accurately follow the planned timetable. In practice, operations of the mobile sink may be affected by external disturbances, which makes them can not reach a destination at the expected time. This feature becomes a limitation of the strictly scheduled approach.
Loosely scheduled approaches do not require sensor nodes and mobile sinks to follow a specific plan. Sensor nodes can be active and inactive independently but still ensure their communications with mobile sinks. Periodic listening is one of the most common approaches to implement loosely scheduled [64]. Mobile sinks periodically broadcast discovery messages while commuting within the sensing field. Sensor nodes wake up and listen in a certain amount of time. If a message from a mobile sink is detected, a sensor sends its sensing data to the sink. In contrast, a sensor does not receive any message, it turns to inactive mode. This approach is applied to UAV-assisted WSNs [65]. Another approach is to use multiple communication channels. In paper [66], the use of two distinct channels is investigated. A channel with greater transmission power is used for a discovery at a far distance while the lower power channel is used for the near discovery channel. This approach significantly improves detection time, but it also increases the total energy consumption of the system.
In on-demand schedules, sensor nodes only wake up if they are activated by an activity of mobile sinks. This method greatly reduces energy consumption as sensors only are awake when mobile sinks require sensing information from them. Multiple radio approach is used to realize on-demand scheduled mechanism [67]. In multiple radio approaches, a high-power radio is used for data transmission, and a low-power one is used to deliver activated messages to sensor nodes. When sensor nodes receive an activating message, they operate in active mode and start to transfer their data to mobile sinks. Xue Yang et al. [68] propose a pipeline tone wake-up mechanism to deal with the trade-off between energy efficiency and delay in multiple radio approaches. This approach his studied to be applied to WSNs with mobile data collectors [64].
3.2. Mobility-Based Mechanism
When mobile sinks periodically come in sensing fields with a constant trajectory, sensor nodes can improve their working schedules by learning mobility patterns of mobile sinks. Sensors can estimate the time when mobile sinks are likely to be in their communication distances and wake up to communicate with sinks. Then, sensors turn to be inactive for the remaining time. In paper [69], the authors propose an efficient scheduling mechanism for sensor nodes based on reinforcement learning (RL). Each sensor learns hourly behaviors of mobile devices and adjusts/schedules its operation when encounters with mobile sinks are expected. The authors in [70] also exploit reinforcement learning to develop a resource-aware data accumulation framework. This framework shows an effectiveness in maximizing the numbers of contacts between sensors and mobile sinks as well as minimize the energy expenditure of sensor nodes. A hybrid algorithm is proposed to combine reinforcement learning and a dual beaconing approach [71]. Therefore, the proposed method can adapt different mobility scenarios for mobile sinks.
4. Data Transfer in UAV-Assisted WSNs
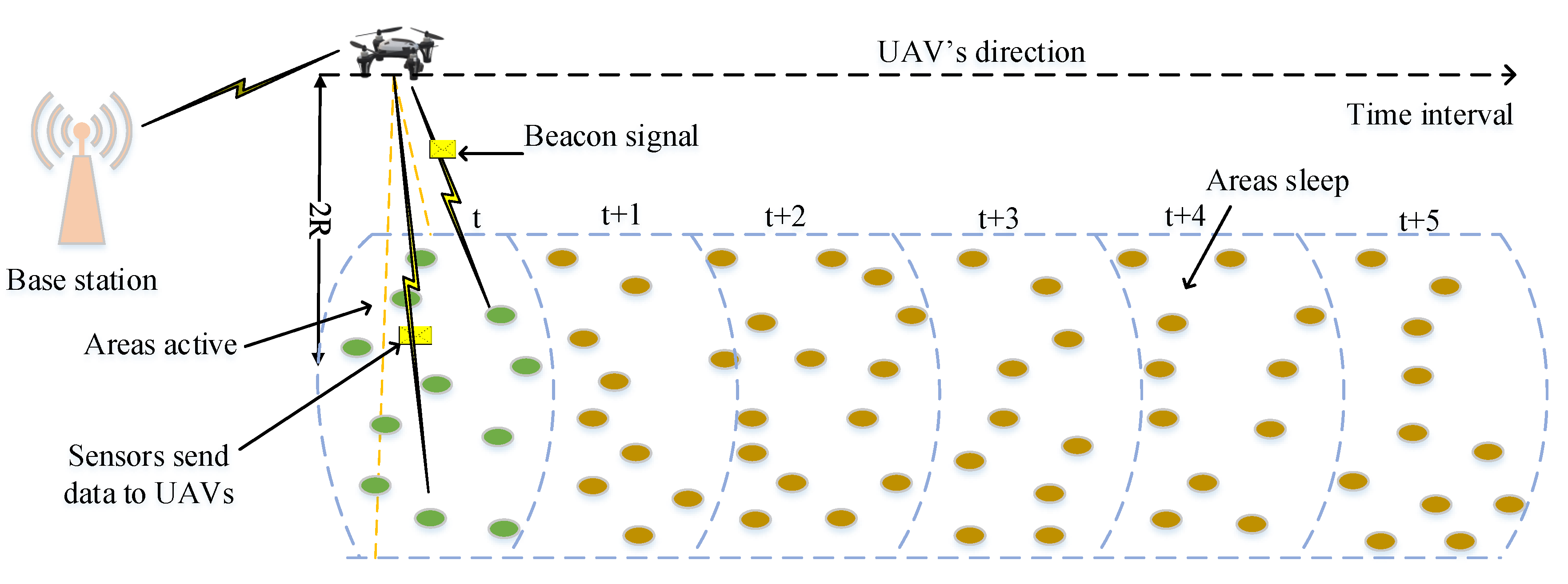
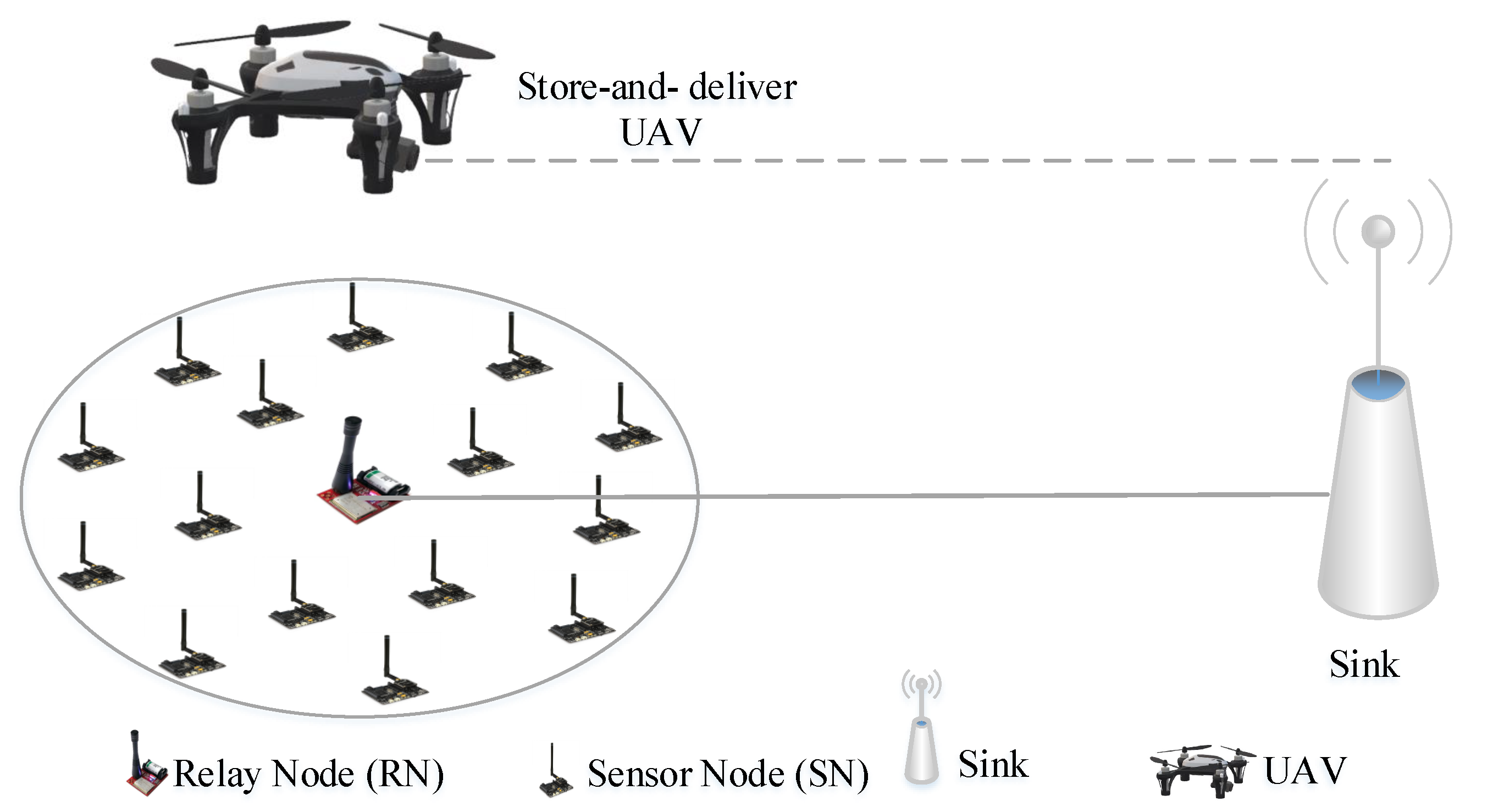
4.1. Store-and-Forward Mechanisms
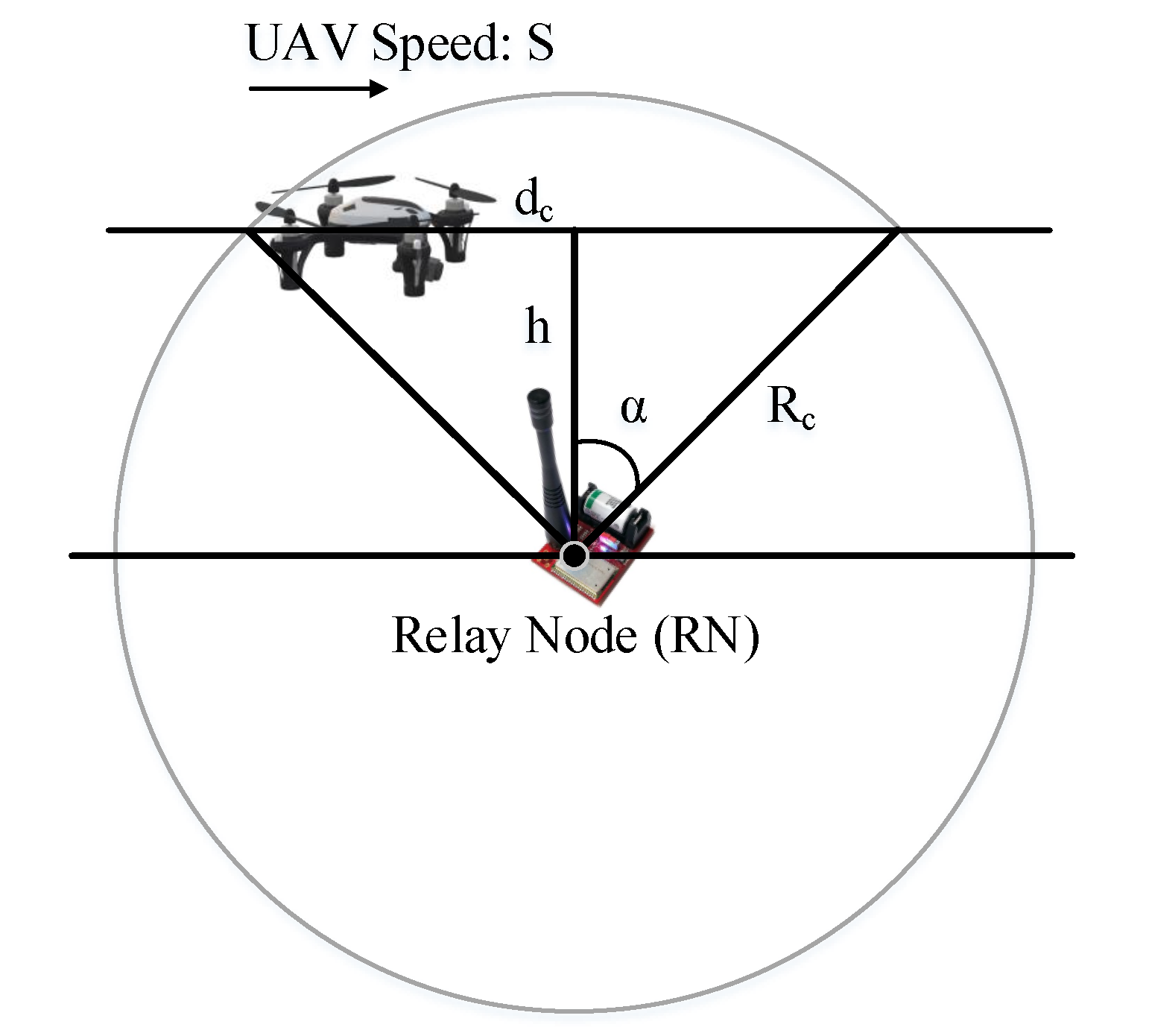
In this model, the basic concepts are illustrated in Figure 5 and Figure 6. UAVs travel along a static trajectory or a dynamic trajectory. The UAVs also move into the communication range of the clusters. The UAVs and the cluster heads will start the procedures of transmitting and receiving data. The UAVs will save the newly received data in UAVs’ buffers. When they fly to the data center they will transmit all the data they have just received and then return to start a new cycle [72]. This data exchange process along with the related parameters is illustrated in Figure 6. When UAVs are within communication ranges of RNs, these two devices are able to exchange data before UAVs move out of the range of RNs [73].
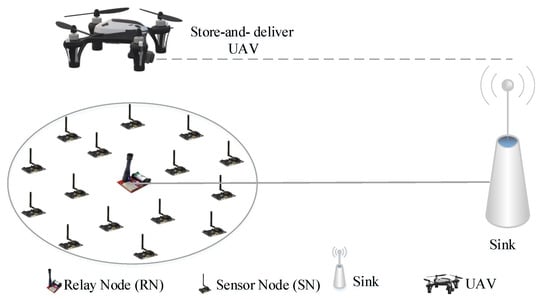
Figure 5.
Data collection from WSNs with the support of UAVs.
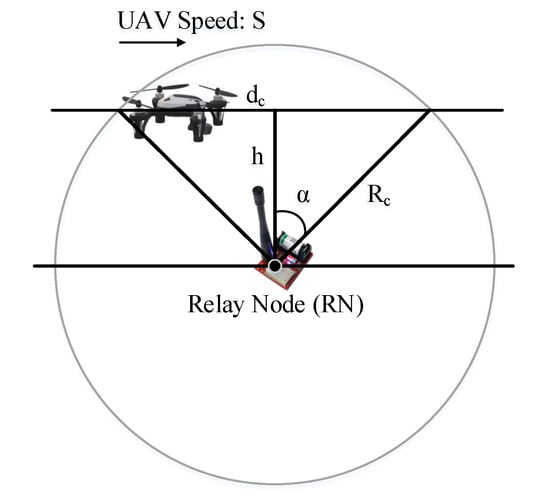
Figure 6.
UAVs collect data while they are within the communications range of Relay Nodes.
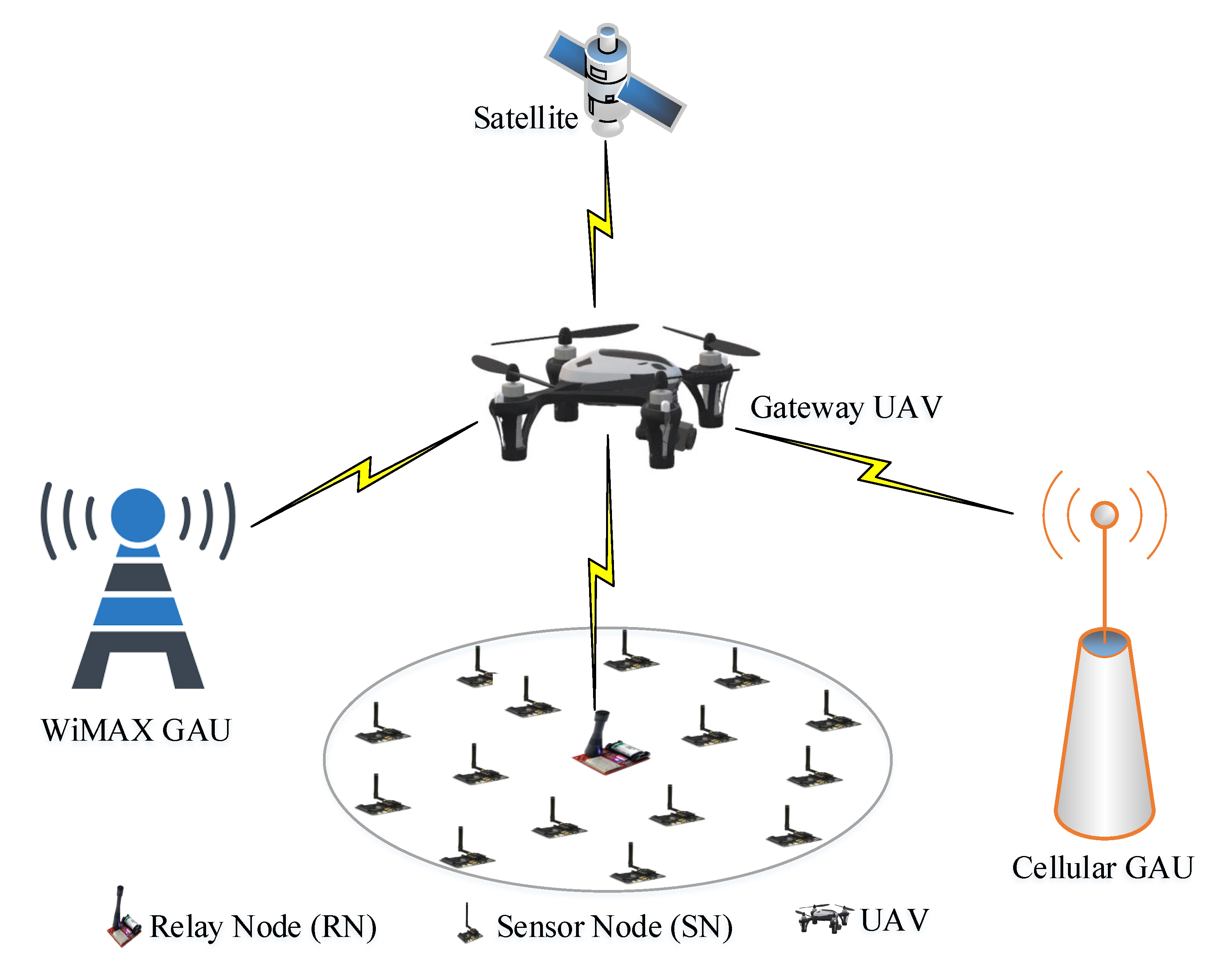
4.2. Real-Time Data Transfer Mechanisms
Transferring data in real-time from sensor nodes to remote base stations is required in some specific applications. Figure 7 depicts the model working mechanism. As sensors detect a special event that requires real-time monitoring, a message indicating the location of the event is released. UAVs are sent to this location to perform real-time data collection. When UAVs are within the communication ranges of sensors, they play a role as gateways that provide real-time data transfer between sensor nodes and base stations.
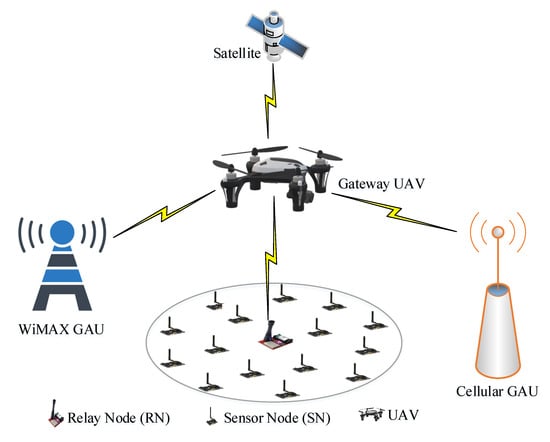
Figure 7.
UAV-Based data collection in WSNs: Real-time data communication with the UAV serving as a gateway to one of more infrastructure network.
This transfer model is applied to provide real-time monitoring in emergency circumstances, or in environments which are hazardous to human. The real-time data transfer model of UAVs and WSNs in natural disaster management is discussed in [74]. A cooperative UAV-WSNs system is proposed for border surveillance [75]. Whenever a trespasser is detected by sensors, UAVs are sent to remotely provide real-time video of the intrusion. In paper [76], an UAV-aided scheme for data collection in wireless nanosensor networks is investigated. Due to their small sizes, nanosensors do not carry batteries. Each sensor harvests electromagnetic waves radiated by UAVs to achieve energy for its own. By utilizing the harvested energy, sensors measure sensing data to be sent to a UAV-based gateway. To implement real-time data communications, several technologies could be used by UAVs, such as cellular, satellite, and WiMAX communication.
4.3. Hybrid Data Collection and Transfer Mechanisms
The hybrid data collection and transfer models combine two mentioned models, namely, store-and-forward and real-time data transfer models. Therefore, UAVs can perform data collection either in store-and-forward or real-time mode. A suitable transfer model could be chosen based on types of sensing data which is collected from sensing fields by UAVs. As the data are required to be immediately updated, UAVs will be required to send the data to base stations in real-time, using long-distance transmission technologies. Otherwise, data could be stored in the buffers of UAVs and updated later when the UAVs return base stations. When implementing the hybrid data transfer model, there are several parameters that should be considered such as buffers of UAV, data rate, communication delay, and bandwidth, etc. Per-byte cost is also an important parameter that needs to be considered. Real-time transfer model could be costly to transmit high-quality data, while store-and-forward mode can provide higher data quality at a lower cost. However, this mode causes high latency.
4.4. Blockchain-Based Swarm UAV Systems for Enhancing the Performance of Data Collection
Recently there has been a significant rise in interest in the deployment of swarm UAV systems. Swarm UAV systems offer many advantages compared to using a single UAV in terms of robustness, time and energy-efficient, etc. [77]. Despite many advantages, utilizing the swarm of UAVs in WSNs still possesses critical issues such as security and data integrity. As sensing data are transferred from sensing devices to UAVs through a wireless channel, it is easily attacked. Furthermore, a UAV has to handle a number of sensing devices. The accumulated data may encounter alterations if there is not a good data acquisition process. Blockchain technology is a promising solution to solve the two above-mentioned problems. Blockchain is considered as a digital ledger on a peer-to-peer network in which each peer has a similar copy ledger. Blockchain technology can greatly improve the security of wireless communications between UAVs and sensing devices. By employing asymmetric encryption and a Merkle tree, all miners must reach an agreement invalidating data in order to add or modify new data. Therefore, the security of the communication network is very robust. Various studies have featured attempts to employ blockchain technology to improve the performance of UAV swarms. In [78], a blockchain-based data collection method was carried out. UAVs gathered data from WSNs, then transmitted it to a central server in which blockchain was implemented. At the center, sensing data were evaluated to guarantee data security and integrity. In [79], Wang et al. proposed a low computational blockchain scheme to enhance the security of UAV networks. A novel algorithm (Proof-of-Traffic) was implemented by utilizing passive broadcasts of data blocks which helps to reduce additional routings. The results shown that UAV networks can still recognize threatening messages with significantly lower power consumption compared to using traditional Proof-of-Work and Proof-of-Stake.
5. Routing in UAV-Assisted WSNs
In this section, we review all the routing protocols in WSNs that are supported by UAVs. These protocols are classified based on the network structure and protocol operations as shown in Table 2. Each routing protocol is efficient at a certain topology. In this paper, we classify topologies into five types including Flat, Cluster, Tree, Linear Sensor Network, Positions. Routing in the network is a very important component to improve the performance of the network. Thanks to the routing algorithms, problems in the network such as planning path, coverage, power consumption, latency, as shown in Table 2 are solved. However, each routing protocol can only solve a few problems. There is no protocol that can solve all network problems. In [80] the authors concentrate on optimizing the trajectory of UAVs to improve the efficiency of data collection in WSNs. However, other issues such as energy consumption, coverage, are not mentioned here. Most of the routing protocols mentioned in the table below are aimed at solving the problem of energy consumption in the network. Besides, a few protocols deal with the problem of communication latency as in paper [81,82]. The problems addressed in Table 2 such as power expenditures, the optimized trajectory of UAVs is to tackle the problems such as path planning, increase network lifetime [81,83], as shown in Table 3.
Table 2.
Some problems that the routing protocol solved in UAV-assisted WSN.
Table 3.
Main optimized results are implemented to tackle routing problems in UAV- assisted WSNs.
The routing protocols in UAV-assisted WSNs tackle the specific problems as shown in Table 4. However, they still have some limitations which we discuss in this section. A heuristic solution in [80] could provide the UAVs with an energy-efficient path. It means that UAVs will visit a certain number of nodes. Therefore, sensors far from visited nodes may have to send their data through one or more intermediate nodes, which may cause delay and loss of information. In [63], a framework for UAV trajectory planning and UAV-Sensor synchronization is well-established. However, the paper only takes into account a scenario with a single UAV. The same problem of SN-UAV protocol is found in [85]. Problems related to noise are also not considered. Authors in [81] provide an effective framework for the cooperative working of multiple devices in WSNs. However, data congestion and interference problems are not considered. Some works in [84] address problems of sensor deployment using UAVs and find optimal routes for UAVs. The limitation is that the work only evaluates small-size networks. An adaptive path planning strategy is proposed in [28]. After each working period, new cluster heads are chosen in order to ensure balance in the energy of the whole network. The UAV updates its flight according to newly established cluster heads. The multi-hop communication among clusters is not considered. Therefore, UAVs may consume a huge amount of energy as the number of clusters is large. Paper [86] aims to optimize UAVs’ trajectory and attitude to cover all sensor nodes. This work should extend to multiple UAV systems since a UAV working alone may not effectively cover a large number of sensors. The proposed protocol in [56] is applicable for various sizes of networks. However, parallel processing is not evaluated.
Table 4.
The important routing problems in the network are solved by the routing protocols mentioned above.
The flying time of UAVs is optimized in the solution proposed in [88]. However, the interference among UAVs is not analyzed, which may affect network performance by exploiting multiple UAVs. A compressed data collection technique is utilized in [89] which helps mitigate energy expenditure by decreasing the number of transmissions. This approach may not be effective while applying to networks with small sizes. Research work in [82] faces the same issue. A solution in [90] aims to extend covered areas. The effects of UAVs’ trajectory and attitude on sensing performance are not mentioned. Obstacle avoidance is effectively taken into account while performing clustering and UAV’s trajectory planning. The limitation is that the network is less robust to cluster head’s failures. The authors of [94] propose a protocol which mitigates interference between sensors and UAVs. However, the interference among sensors in WSNs is not addressed. Node localization and synchronization between UAV and sensor node are optimized in [95]. The drawback of this approach is that the cost is relatively high as this approach requires many beacon nodes.
6. UAV Motion Control Problems
Exploiting UAVs can extend the lifetime of WSNs by reducing long-range data transmission from sensor nodes to the base stations. Acting as a mobile sink, an UAV is required to travel to cover an entire sensing area or a certain part depending on specific missions. The maneuverability of mobile sinks can significantly affect the design of data collection processes, motion planning for mobile sinks is an important research area in implementing UAV-assisted data collection. Two essential factors in motion planning are trajectory and speed. In this section, motion planning in the context of trajectory and speed are presented.
6.1. UAV Path-Planning
Trajectory control can be divided into offline planning and online planning. For offline planning, information about working environments is available. Flight paths for UAVs can be generated offline based on this known information. The predefined path does not change through missions. In contrast, online planning provides more flexible flight paths for UAVs. The flight paths are calculated and modified while the UAVs fly to adapt to disturbances in changing environments.
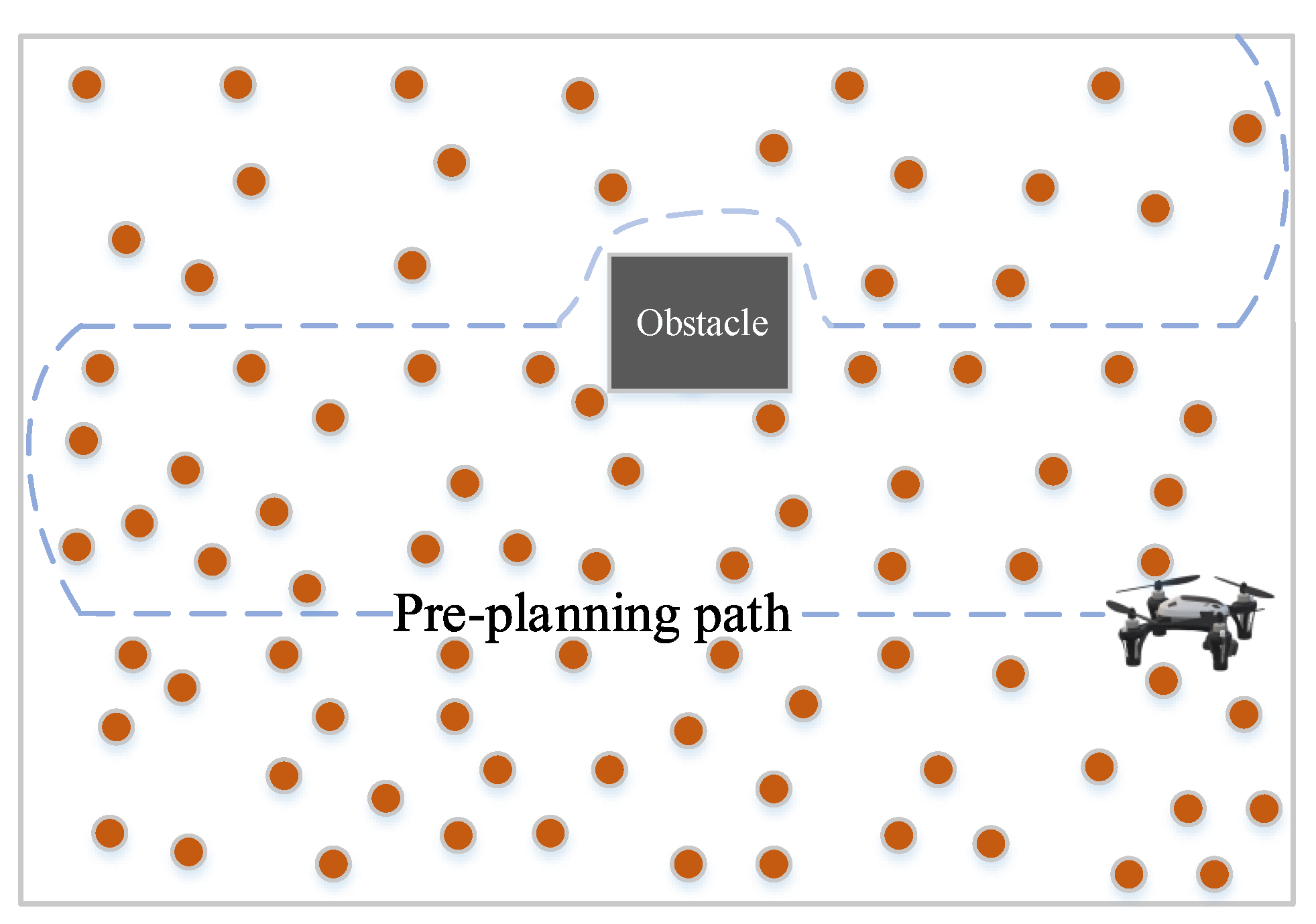
Offline trajectory planning for mobile sinks is a problem that is extensively studied, as shown in Figure 8. The appropriate trajectory is computed concerning several constraints such as obstacle constraints, speed constraints, energy consumption constraints, or minimal path constraints. In [63], the authors propose a solution that generates a static trajectory for UAVs concerning the wake-up and sleep mechanism of sensor nodes. A path-planning algorithm is proposed that aims to minimize the flying time of UAVs [97]. In [82], an energy-efficient UAV-assisted method of data collection is investigated. Sensor nodes are clustered and a forwarding tree is formed. Each cluster is based on a Compressive Data Gathering technique. By using the results, trajectories for UAVs are planned so that the distance from initial positions of UAVs to cluster heads is minimized. Heuristic algorithms have also been studied to solve trajectory planning problems for UAVs. In paper [98], a PSO-based method is studied to find trajectories for UAVs. The energy consumption and the bit error rate of sensor nodes are significantly reduced. By exploiting dynamic programming and genetic algorithm, the authors of [72] propose an optimal trajectory planning for the networks with respect to the age of information constraints.
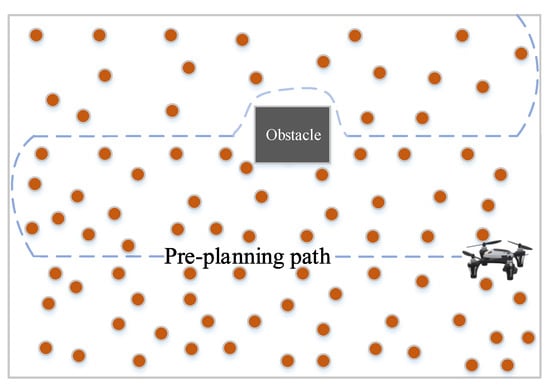
Figure 8.
Offline trajectory planning.
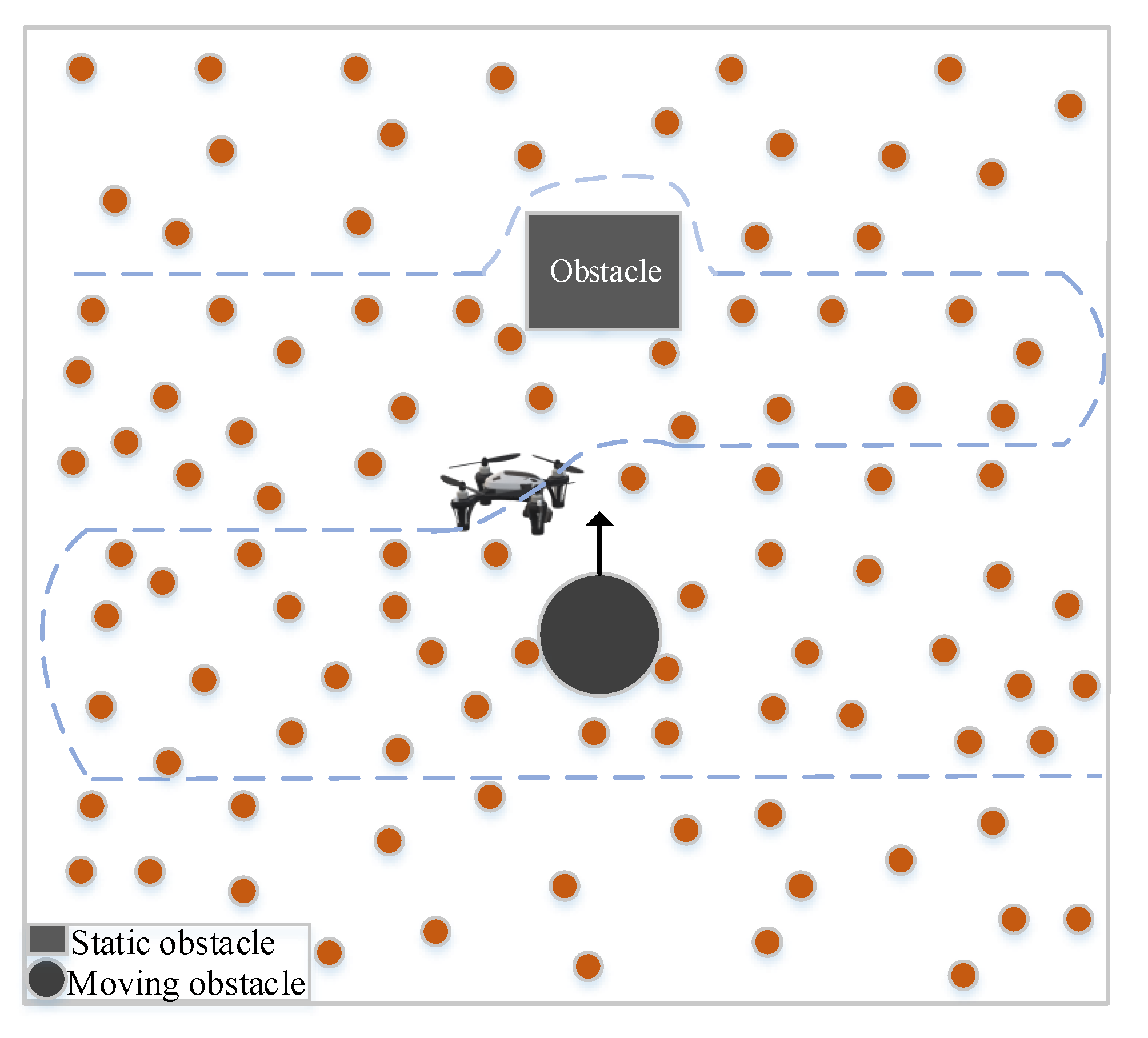
Online trajectory planning is introduced to resolve system and mission uncertainties while mobile sinks operate, which is illustrated in Figure 9. In [99] is investigated dynamic path planning for UAVs based on demands of sensor nodes. By receiving feedback from sensor nodes, UAVs can redesign the trajectory to adapt to the requirements of sensors. The parameters of a flight controller can also be adjusted to optimize the flight performance. In paper [28], sensor nodes can be assigned to become cluster heads depending on their residual energy. UAVs have to update the trajectories as the cluster head roles change. In paper [100], the authors propose cooperation between WSNs and UAVs to monitor wildfires. Static sensors are distributively deployed in a target area. Whenever sensor nodes detect possible signals of a wildfire, sensors broadcast their warning signals. Then, UAVs move to warn locations to perform further data collection processes. Online path planning is also used to provide safe flights for UAVs while operating in complex environments which are hard to model, such as environments with moving obstacles. In paper [101], a collision-free trajectory-planning algorithm is introduced for UAVs to navigate in dynamic environments. First, an initial trajectory is determined for each UAV. If UAVs detect possible collisions with static obstacles or other UAVs while performing a mission, UAVs update their trajectory to avoid collisions. The online trajectory planning is implemented based on Rapidly Exploring Random Trees and Optimal Rapidly Exploring Random Tree algorithms.
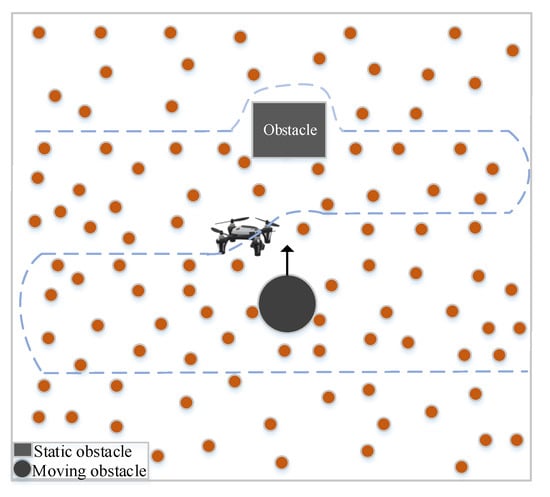
Figure 9.
Online trajectory planning.
6.2. UAV Speed Control Mechanisms
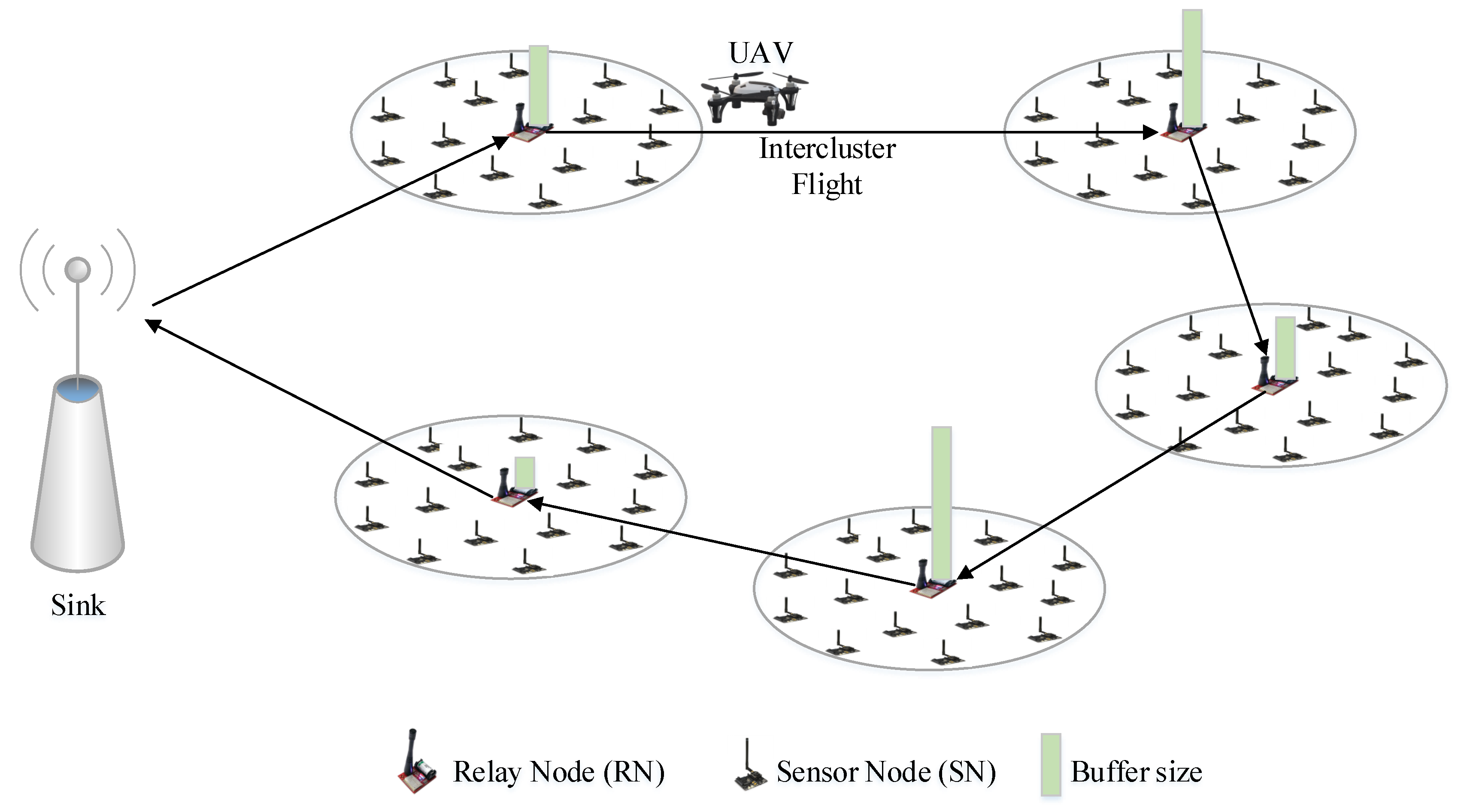
There are different strategies for controlling UAV speed while collecting data in WSNs. They are categorized in three cases for the UAV speeds—(1) Constant Speed UAV (CSU), (2) Variable Speed UAV, (3) Adaptable Speed UAV (ASU). Figure 10 shows UAV trajectories that need different speed mechanisms.
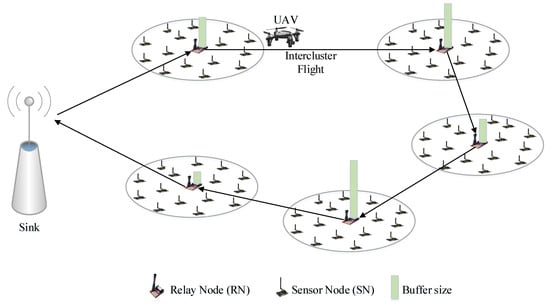
Figure 10.
Illustration of the process of UAV supporting data collection from cluster heads to sink nodes.
Constant Speed UAV (CSU): In this type, between clusters and sensor nodes, UAVs will move at a fixed velocity. When the UAV is within the coverage of a cluster, it begins the data collection process. If there is missing data in the RN’s buffer, these data must wait until the next cycle of the UAV. When the UAV reaches the base station (BS), it transmits all the collected data to the base station to start a new cycle [102]. The limitation of this case is that real-time data cannot be ensured.
Variable Speed UAV (VSU) [103]: In this case, the UAV will move at a variable speed according to the following two cases:
- Speed of UAV while connected: this case refers to when the UAV is within the communication range of the RN. It means that it is operating the data collection process from the RN. This speed is measured in detail in the paper [104].
- The speed of the UAV when there is no connection: The UAV will change to another level of speed as it moves out of the RN’s communication distance. To ensure efficient data collection and to ensure real-time data, the UAV will speed up as fast as possible when it has no connection.
Adaptable Speed UAV (ASU): when the UAV is within the communication distance of the node, the speed of the UAV will be adjusted to be able to collect all the data from this node. Parameters such as packet size, communication speed greatly affect the data transmission time between the UAV and the node’s buffer. Hence, the UAVs can fly faster when collecting data from nodes with smaller buffers that results in the latency reduced. However, it will lead to inequity between different nodes because nodes have unbalanced buffers.
In paper [105], the authors suggest latency-sensitive data collection in situations where the speed of mobile elements is controllable. The first algorithm proposed by the author is Stop to Collect Data (SCD) which is similar to the speed change algorithm to connect in the communication range. T is the maximum time mobile element (ME) can take for one cycle and S is the constant speed of ME , such that all nodes in the network are at their most accessible at time T. The algorithm can determine whether ME moves with speed S or stops. In addition, the author also proposes the second algorithm, which is Adaptive Speed Control (ASC). The idea of this algorithm is: nodes are classified into three different groups, depending on whether the amount of data collected is low, medium or high. ME will stop at the node with a low data collection rate. For a node with an average data rate, it will approach the rate s. ME will move at a speed of 2 s when approaching the remaining network nodes. However, ME still completes its data collection cycle in time T. This algorithm is said to have high performance in the case of a sparse network of network nodes.
7. Opening Research Issues and Challenges
The use of UAVs has numerous advantages compared to mobile ground nodes. UAVs have higher mobility, longer operation range, and longer operation time. With the benefits, UAV-assisted data collection in WSNs has effectively improved the performance of WSNs in terms of network lifetime, energy efficiency, latency, and routing complexity. Although numerous studies have been conducted recently, the deployment of UAVs in WSNs still has various issues. This section discusses open challenges to better utilize the use of UAV-assisted data collection in WSNs.
- UAV path planning: Finding a proper flying path for UAVs is still a major issue. The offline path planning method cannot guarantee robustness against model uncertainties, whereas the online path planning method may not provide optimal solutions to fulfill constraints such as time or distance constraints. A hybrid algorithm that combines the advantages of both offline and online approaches is a future research direction.
- Sensor-to-UAV Data Transfer: Transmitting sensing data to a UAV hovering over sensors could be a challenge [106]. Energy expenditure should be carefully considered in designing data transmitting protocol because of the limited energy of sensor nodes. Most data transfer protocols consider collecting data problems in one-dimensional WSNs while routing for UAV-assisted WSNs is three-dimensional. Therefore, data transfer needs to be further studied.
- UAV Coverage: The coverage of UAVs is also a critical issue. Most of the previous studies utilized a single UAV to collect data from static ground nodes. Therefore, coverage problems in two-dimensional scenarios are extensively studied. Recently, using a multiple-UAVs system has been extensively studied due to its high efficiency compared with using a single one. The coverage area of each UAV can be different depending on its altitude. It is necessary to investigate the coverage problems of multiple UAVs working together.
- Multi-UAV-Aided WSNs: Exploiting multi-UAV systems can offer significant enhancements in data collection time, latency, fault tolerance, and network lifetime [107]. Coordination among UAVs is posing challenges in implementing multiple UAV systems. Various problems need to be investigated, such as collision avoidance between UAVs, multi-hop communication for UAVs, etc.
- UAV Positioning: A common approach for UAV positioning is using accurate information from GPS. However, GPS signals may be weak or unavailable, for example, in disaster areas. Positioning only based on GPS single is not sufficient. This situation requires further research for advanced positioning techniques which are more robust.
- Security Issues: Security is a critical problem in either UAV-assisted WSNs or other remote sensing systems since they are often deployed outside with the lack of security. As sensor nodes and UAVs communicate with each other wirelessly, their communications have to face numerous security issues [108]. Several studies involving encryption and identity verification have been proposed to protect the security of the network attacked by bogus routing information, flooding attacks, etc. Designing a more reliable communication channel to meet security requirements would significantly encourage the deployment of UAV-assisted WSNs.
8. Conclusions and Future Developments
Routing protocols and communication technologies in UAV-aided WSNs are still rapidly growing in different fields of applications. This paper presents a comprehensive and comparative study of the models and strategies for UAV-Based Data Communication in WSNs with different scenarios. Different problems for data collection in such networks are classified and compared. Communication and control problems in the networks are provided with details that can provide a significant overview in almost reliable applications. In addition, different routing mechanisms and control strategies are provided and compared in tables for further details. The main problems of UAV-assisted WSN are summarized, as well as solutions for each specific scenario in supporting WSNs. This enables researchers to identify the advantages and limitations of each technology and protocol. This is fundamental for choosing the protocols and communication technologies in specific applications. Finally, new research directions, as well as challenges, are also reviewed and discussed. This work shows promising points for further developments in the field. In future work, all the opening issues would be considered to improve the performance of either UAVs communication networks or intra-WSN communications. Facing multimedia network requirements, all the combined networks should be improved, synchronized, secured, etc., to result in high quality of services (QoS).
Author Contributions
Conceptualization, M.T.N. and F.V.; methodology, C.V.N. and H.T.D.; software, A.D.N.; validation, G.A., H.T.H. and M.T.N.; formal analysis, T.A.T.; investigation, M.T.N.; resources, H.T.D.; writing—original draft preparation, C.V.N. and T.A.T.; writing—review and editing, M.T.N.; visualization, F.V.; supervision, G.A.; project administration, M.T.N.; funding acquisition, F.V. and H.T.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
The authors would like to thank Thai Nguyen University of Technology (TNUT), Ministry of Education and Training (Project B2021-TNA-01), Viet Nam for the support.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hussain, R.; Sahgal, J.; Mishra, P.; Sharma, B. Application of WSN in rural development, agriculture water management. Int. J. Soft Comput. Eng. (IJSCE) 2012, 2, 68–72. [Google Scholar]
- Khanafer, M.; Guennoun, M.; Mouftah, H.T. WSN Architectures for Intelligent Transportation Systems. In Proceedings of the 2009 3rd International Conference on New Technologies, Mobility and Security, Cairo, Egypt, 20–23 December 2009; pp. 1–8. [Google Scholar]
- Wang, Z.; Ding, H.; Li, B.; Bao, L.; Yang, Z. An energy efficient routing protocol based on improved artificial bee colony algorithm for wireless sensor networks. IEEE Access 2020, 8, 133577–133596. [Google Scholar] [CrossRef]
- Vu, V.T.; Quyen, T.V.; Truong, L.H.; Le, A.M.; Nguyen, C.V.; Nguyen, M.T. Energy efficient approaches in wireless sensor networks. ICSES Trans. Comput. Netw. Commun. 2020, 6, 1–10. [Google Scholar]
- Zagrouba, R.; Kardi, A. Comparative Study of Energy Efficient Routing Techniques in Wireless Sensor Networks. Information 2021, 12, 42. [Google Scholar] [CrossRef]
- Tuan Nguyen, M.; Teague, K.A.; Rahnavard, N. CCS: Energy-efficient data collection in clustered wireless sensor networks utilizing block-wise compressive sensing. Comput. Netw. 2016, 106, 171–185. [Google Scholar] [CrossRef] [Green Version]
- Shyjith, M.; Maheswaran, C.; Reshma, V. Optimized and dynamic selection of cluster head using energy efficient routing protocol in WSN. Wirel. Pers. Commun. 2021, 116, 577–599. [Google Scholar] [CrossRef]
- Nguyen, M.T. Minimizing Energy Consumption in Random Walk Routing for Wireless Sensor Networks utilizing Compressed Sensing. In Proceedings of the 2013 8th International Conference on System of Systems Engineering, Maui, HI, USA, 2–6 June 2013; pp. 297–301. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Teague, K.A. Tree-Based Energy-Efficient Data Gathering in Wireless Sensor Networks Deploying Compressive Sensing. In Proceedings of the 2014 23rd Wireless and Optical Communication Conference (WOCC), Newark, NJ, USA, 9–10 May 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Rahnavard, N. Cluster-Based Energy-Efficient Data Collection in Wireless Sensor Networks Utilizing Compressive Sensing. In Proceedings of the MILCOM 2013-2013 IEEE Military Communications Conference, San Diego, CA, USA, 18–20 November 2013; pp. 1708–1713. [Google Scholar]
- Huang, R.; Ma, L.; Zhai, G.; He, J.; Chu, X.; Yan, H. Resilient routing mechanism for wireless sensor networks with deep learning link reliability prediction. IEEE Access 2020, 8, 64857–64872. [Google Scholar] [CrossRef]
- Shobana, M.; Sabitha, R.; Karthik, S. Cluster-based systematic data aggregation model (CSDAM) for real-time data processing in large-scale WSN. Wirel. Pers. Commun. 2020, 117, 2865–2883. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Truong, L.H.; Tran, T.T.; Chien, C.F. Artificial intelligence based data processing algorithm for video surveillance to empower industry 3.5. Comput. Ind. Eng. 2020, 148, 106671. [Google Scholar] [CrossRef]
- Qaisar, S.; Bilal, R.M.; Iqbal, W.; Naureen, M.; Lee, S. Compressive sensing: From theory to applications, a survey. J. Commun. Netw. 2013, 15, 443–456. [Google Scholar] [CrossRef]
- Vikram, R.; Sinha, D.; De, D.; Das, A.K. PAFF: Predictive analytics on forest fire using compressed sensing based localized Ad Hoc wireless sensor networks. J. Ambient Intell. Humaniz. Comput. 2021, 12, 1647–1665. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Teague, K.A. Mobile Distributed Compressive Sensing for Data Collection in Wireless Sensor Networks. In Proceedings of the 2015 International Conference on Advanced Technologies for Communications (ATC), Ho Chi Minh City, Vietnam, 14–16 October 2015; pp. 188–193. [Google Scholar]
- Zhou, Y.; Yang, L.; Yang, L.; Ni, M. Novel energy-efficient data gathering scheme exploiting spatial-temporal correlation for wireless sensor networks. Wirel. Commun. Mob. Comput. 2019, 2019, 4182563. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Teague, K.A. Compressive sensing based random walk routing in wireless sensor networks. Ad Hoc Netw. 2017, 54, 99–110. [Google Scholar] [CrossRef]
- Nguyen, M.T.; La, H.M.; Teague, K.A. Compressive and Collaborative Mobile Sensing for Scalar Field Mapping in Robotic Networks. In Proceedings of the 2015 53rd Annual Allerton Conference on Communication, Control, and Computing (Allerton), Control, Monticello, IL, USA, 29 September–2 October 2015; pp. 873–880. [Google Scholar]
- Chen, T.C.; Chen, T.S.; Wu, P.W. On data collection using mobile robot in wireless sensor networks. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2011, 41, 1213–1224. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Teague, K.A. Random Sampling in Collaborative and Distributed Mobile Sensor Networks Utilizing Compressive Sensing for Scalar Field Mapping. In Proceedings of the 2015 10th System of Systems Engineering Conference (SoSE), San Antonio, TX, USA, 17–20 May 2015; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, M.T.; Teague, K.A. Compressive and Cooperative Sensing in Distributed Mobile Sensor Networks. In Proceedings of the MILCOM 2015-2015 IEEE Military Communications Conference, Tampa, FL, USA, 26–28 October 2015; pp. 1033–1038. [Google Scholar] [CrossRef]
- Paz, E.B.O.; Zacharatou, E.T.; Markl, V. Towards Resilient Data Management for the Internet of Moving Things. BTW 2021 2021. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Shakoor, S.; Kaleem, Z.; Baig, M.I.; Chughtai, O.; Duong, T.Q.; Nguyen, L.D. Role of UAVs in Public Safety Communications: Energy Efficiency Perspective. IEEE Access 2019, 7, 140665–140679. [Google Scholar] [CrossRef]
- Say, S.; Inata, H.; Liu, J.; Shimamoto, S. Priority-based data gathering framework in UAV-assisted wireless sensor networks. IEEE Sens. J. 2016, 16, 5785–5794. [Google Scholar] [CrossRef]
- Cao, H.; Liu, Y.; Yue, X.; Zhu, W. Cloud-assisted UAV data collection for multiple emerging events in distributed WSNs. Sensors 2017, 17, 1818. [Google Scholar] [CrossRef] [PubMed]
- Martinez-de Dios, J.R.; Lferd, K.; de San Bernabé, A.; Núnez, G.; Torres-González, A.; Ollero, A. Cooperation between UAS and wireless sensor networks for efficient data collection in large environments. J. Intell. Robot. Syst. 2013, 70, 491–508. [Google Scholar] [CrossRef]
- Ma, X.; Kacimi, R.; Dhaou, R. Fairness-Aware UAV-Assisted Data Collection in Mobile Wireless Sensor Networks. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 995–1001. [Google Scholar]
- Bouhamed, O.; Ghazzai, H.; Besbes, H.; Massoud, Y. A UAV-Assisted Data Collection for Wireless Sensor Networks: Autonomous Navigation and Scheduling. IEEE Access 2020, 8, 110446–110460. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Nguyen, M.T.; Do, H.T.; Hua, H.T.; Nguyen, C.V. DRL-Based Intelligent Resource Allocation for Diverse QoS in 5G and toward 6G Vehicular Networks: A Comprehensive Survey. Wirel. Commun. Mob. Comput. 2021, 2021, 1–21. [Google Scholar] [CrossRef]
- Liu, S.; Wei, Z.; Guo, Z.; Yuan, X.; Feng, Z. Performance Analysis of UAVs Assisted Data Collection in Wireless Sensor Network. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–5. [Google Scholar]
- Hermosilla, T.; Palomar-Vázquez, J.; Balaguer-Beser, Á.; Balsa-Barreiro, J.; Ruiz, L.A. Using street based metrics to characterize urban typologies. Comput. Environ. Urban Syst. 2014, 44, 68–79. [Google Scholar] [CrossRef] [Green Version]
- Demirhan, M.; Premachandra, C. Development of an Automated Camera-Based Drone Landing System. IEEE Access 2020, 8, 202111–202121. [Google Scholar] [CrossRef]
- Zhang, X.; Du, Y.; Chen, F.; Qin, L.; Ling, Q. Indoor Position Control of a Quadrotor UAV with Monocular Vision Feedback. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 9760–9765. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.J.; Chen, J.A.; Huang, Y.M. Intelligent Environmental Sensing with an Unmanned Aerial System in a Wireless Sensor Network. Int. J. Smart Sens. Intell. Syst. 2017, 10. [Google Scholar] [CrossRef] [Green Version]
- Trasviña-Moreno, C.A.; Blasco, R.; Marco, Á.; Casas, R.; Trasviña-Castro, A. Unmanned aerial vehicle based wireless sensor network for marine-coastal environment monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef] [PubMed]
- Rhee, S.H.; Chung, K.; Kim, Y.; Yoon, W.; Chang, K.S. An Application-Aware MAC Scheme for IEEE 802.15. 3 High-Rate WPAN. In Proceedings of the 2004 IEEE Wireless Communications and Networking Conference (IEEE Cat. No. 04TH8733), Atlanta, GA, USA, 21–25 March 2004; Volume 2, pp. 1018–1023. [Google Scholar]
- Fadlullah, Z.M.; Takaishi, D.; Nishiyama, H.; Kato, N.; Miura, R. A dynamic trajectory control algorithm for improving the communication throughput and delay in UAV-aided networks. IEEE Netw. 2016, 30, 100–105. [Google Scholar] [CrossRef]
- Frew, E.W.; Brown, T.X. Airborne communication networks for small unmanned aircraft systems. Proc. IEEE 2008, 96, 2008–2027. [Google Scholar] [CrossRef]
- Huiru, C.; Xuanjiao, L.; Yeqian, L.; Guo, L. Design and Experiment of a WSN Sink Platform Based on fixed Wing Unmanned Aerial Vehicles. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016; pp. 1271–1274. [Google Scholar]
- Ho, D.T.; Shimamoto, S. Highly Reliable Communication Protocol for WSN-UAV System Employing TDMA and PFS Scheme. In Proceedings of the 2011 IEEE Globecom Workshops (Gc Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 1320–1324. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Yan, C.; Fu, L.; Zhang, J.; Wang, J. A comprehensive survey on UAV communication channel modeling. IEEE Access 2019, 7, 107769–107792. [Google Scholar] [CrossRef]
- Azari, M.M.; Geraci, G.; Garcia-Rodriguez, A.; Pollin, S. UAV-to-UAV communications in cellular networks. IEEE Trans. Wirel. Commun. 2020, 19, 6130–6144. [Google Scholar] [CrossRef]
- Vinogradov, E.; Sallouha, H.; De Bast, S.; Azari, M.M.; Pollin, S. Tutorial on UAV: A blue sky view on wireless communication. arXiv 2019, arXiv:1901.02306. [Google Scholar]
- Chatzigiannakis, I.; Kinalis, A.; Nikoletseas, S. Sink Mobility Protocols for Data Collection in Wireless Sensor Networks. In Proceedings of the 4th ACM International Workshop on Mobility Management and Wireless Access, Terromolinos, Spain, 2 October 2006; pp. 52–59. [Google Scholar]
- Sarkar, T.K.; Ji, Z.; Kim, K.; Medouri, A.; Salazar-Palma, M. A survey of various propagation models for mobile communication. IEEE Antennas Propag. Mag. 2003, 45, 51–82. [Google Scholar] [CrossRef] [Green Version]
- Hashemi, H. Simulation of the urban radio propagation channel. IEEE Trans. Veh. Technol. 1979, 28, 213–225. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Gomez, K. Modeling cellular-to-UAV path-loss for suburban environments. IEEE Wirel. Commun. Lett. 2017, 7, 82–85. [Google Scholar] [CrossRef]
- Li, W.; Hu, X.; Jiang, T. Path loss models for IEEE 802.15. 4 vehicle-to-infrastructure communications in rural areas. IEEE Internet Things J. 2018, 5, 3865–3875. [Google Scholar] [CrossRef]
- Wei, P.; Gu, Q.; Sun, D. Wireless Sensor Network Data Collection by Connected Cooperative UAVs. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 5911–5916. [Google Scholar]
- Tazibt, C.Y.; Bekhti, M.; Djamah, T.; Achir, N.; Boussetta, K. Wireless Sensor Network Clustering for UAV-based Data Gathering. In Proceedings of the 2017 Wireless Days, Porto, Portugal, 29–31 March 2017; pp. 245–247. [Google Scholar]
- Kim, H.S.; Abdelzaher, T.F.; Kwon, W.H. Minimum-Energy Asynchronous Dissemination to Mobile Sinks in Wireless Sensor Networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 193–204. [Google Scholar]
- Dong, M.; Ota, K.; Lin, M.; Tang, Z.; Du, S.; Zhu, H. UAV-assisted data gathering in wireless sensor networks. J. Supercomput. 2014, 70, 1142–1155. [Google Scholar] [CrossRef]
- Anastasi, G.; Conti, M.; Passarella, A.; Pelusi, L. Mobile-relay forwarding in opportunistic networks. Adapt. Cross Layer Des. Wirel. Netw. 2008, 21, 389. [Google Scholar]
- Gatzianas, M.; Georgiadis, L. A distributed algorithm for maximum lifetime routing in sensor networks with mobile sink. IEEE Trans. Wirel. Commun. 2008, 7, 984–994. [Google Scholar] [CrossRef]
- Caillouet, C.; Giroire, F.; Razafindralambo, T. Optimization of Mobile Sensor Coverage with UAVs. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 622–627. [Google Scholar]
- Nguyen, M.T.; Nguyen, T.T.; Teague, K.A. An Energy-Efficient Combination of Sleeping Schedule and Cognitive Radio in Wireless Sensor Networks Utilizing Compressed Sensing. In Lecture Notes in Networks and Systems, Proceedings of the International Conference on Engineering Research and Applications, Thai Nguyen, Vietnam, 1–2 December 2020; Springer: Cham, Switzerland, 2020; pp. 154–160. [Google Scholar]
- Sayyed, A.; Becker, L.B. A survey on data collection in mobile wireless sensor networks (mwsns). In Cooperative Robots and Sensor Networks 2015; Springer: Cham, Switzerland, 2015; pp. 257–278. [Google Scholar]
- Chakrabarti, A.; Sabharwal, A.; Aazhang, B. Using predictable observer mobility for power efficient design of sensor networks. In Lecture Notes in Networks and Systems, Proceedings of the Information Processing in Sensor Networks, Palo Alto, CA, USA, 22–23 April 2003; Springer: Berlin/Heidelberg, Germang, 2003; pp. 129–145. [Google Scholar]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef] [Green Version]
- Anastasi, G.; Conti, M.; Di Francesco, M. Reliable and energy-efficient data collection in sparse sensor networks with mobile elements. Perform. Eval. 2009, 66, 791–810. [Google Scholar] [CrossRef]
- Ramli, M.R.; Lee, J.M.; Kim, D.S. Hybrid mac protocol for uav-assisted data gathering in a wireless sensor network. Internet Things 2019, 14, 100088. [Google Scholar] [CrossRef]
- Zhao, W.; Ammar, M.; Zegura, E. A Message Ferrying Approach for Data Delivery in Sparse Mobile Ad Hoc Networks. In Proceedings of the 5th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Tokyo, Japan, 24–26 May 2004; pp. 187–198. [Google Scholar]
- Schurgers, C.; Tsiatsis, V.; Ganeriwal, S.; Srivastava, M. Optimizing sensor networks in the energy-latency-density design space. IEEE Trans. Mob. Comput. 2002, 1, 70–80. [Google Scholar] [CrossRef]
- Yang, X.; Vaidya, N.H. A Wakeup Scheme for Sensor Networks: Achieving Balance between Energy Saving and End-to-End Delay. In Proceedings of the RTAS 2004. 10th IEEE Real-Time and Embedded Technology and Applications Symposium, Toronto, ON, Canada, 28 May 2004; pp. 19–26. [Google Scholar]
- Dyo, V.; Mascolo, C. Efficient node discovery in mobile wireless sensor networks. In Lecture Notes in Computer Science, Proceedings of the International Conference on Distributed Computing in Sensor Systems, Santorini Island, Greece, 11–14 June 2008; Springer: Berlin/Heidelberg, Germang, 2008; pp. 478–485. [Google Scholar]
- Shah, K.; Di Francesco, M.; Anastasi, G.; Kumar, M. A framework for resource-aware data accumulation in sparse wireless sensor networks. Comput. Commun. 2011, 34, 2094–2103. [Google Scholar] [CrossRef] [Green Version]
- Kondepu, K.; Restuccia, F.; Anastasi, G.; Conti, M. A Hybrid and Flexible Discovery Algorithm for Wireless Sensor Networks with Mobile Elements. In Proceedings of the 2012 IEEE Symposium on Computers and Communications (ISCC), Cappadocia, Turkey, 1–4 July 2012; pp. 295–300. [Google Scholar]
- Liu, J.; Wang, X.; Bai, B.; Dai, H. Age-Optimal Trajectory Planning for UAV-Assisted Data Collection. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 553–558. [Google Scholar]
- Abdulla, A.E.; Fadlullah, Z.M.; Nishiyama, H.; Kato, N.; Ono, F.; Miura, R. An Optimal Data Collection Technique for Improved Utility in UAS-Aided Networks. In Proceedings of the IEEE INFOCOM 2014-IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 736–744. [Google Scholar]
- Erdelj, M.; Król, M.; Natalizio, E. Wireless sensor networks and multi-UAV systems for natural disaster management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- Berrahal, S.; Kim, J.H.; Rekhis, S.; Boudriga, N.; Wilkins, D.; Acevedo, J. Unmanned Aircraft Vehicle Assisted WSN-Based Border Surveillance. In Proceedings of the 2015 23rd International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 16–18 September 2015; pp. 132–137. [Google Scholar]
- Pirmagomedov, R.; Kirichek, R.; Blinnikov, M.; Koucheryavy, A. UAV-based gateways for wireless nanosensor networks deployed over large areas. Comput. Commun. 2019, 146, 55–62. [Google Scholar] [CrossRef]
- Ferrer, E.C. The blockchain: A new framework for robotic swarm systems. In Advances in Intelligent Systems and Computing, Proceedings of the Future Technologies Conference, Vancouver, BC, Canada, 15–16 November 2018; Springer: Cham, Switzerland, 2018; pp. 1037–1058. [Google Scholar]
- Islam, A.; Shin, S.Y. Bus: A blockchain-enabled data acquisition scheme with the assistance of uav swarm in internet of things. IEEE Access 2019, 7, 103231–103249. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Y.; Niu, S.; Song, H. Lightweight blockchain assisted secure routing of swarm UAS networking. Comput. Commun. 2021, 165, 131–140. [Google Scholar] [CrossRef]
- Mazayev, A.; Correia, N.; Schütz, G. Data gathering in wireless sensor networks using unmanned aerial vehicles. Int. J. Wirel. Inf. Netw. 2016, 23, 297–309. [Google Scholar] [CrossRef]
- Laouira, M.L.; Abdelli, A.; Othman, J.B.; Kim, H. An efficient WSN based solution for border surveillance. IEEE Trans. Sustain. Comput. 2019, 6, 54–65. [Google Scholar] [CrossRef] [Green Version]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.H.; Assi, C. UAV-aided projection-based compressive data gathering in wireless sensor networks. IEEE Internet Things J. 2018, 6, 1893–1905. [Google Scholar] [CrossRef]
- Ho, D.T.; Grøtli, E.I.; Sujit, P.; Johansen, T.A.; Sousa, J.B. Optimization of wireless sensor network and UAV data acquisition. J. Intell. Robot. Syst. 2015, 78, 159–179. [Google Scholar] [CrossRef]
- Gomez, J.M.; Wiedemann, T.; Shutin, D. Unmanned aerial vehicles in wireless sensor networks: Automated sensor deployment and mobile sink nodes. In International Conference on Intelligent Autonomous Systems; Springer: Cham, Switzerland, 2018; pp. 943–953. [Google Scholar]
- Uddin, M.A.; Mansour, A.; Jeune, D.L.; Ayaz, M.; Aggoune, E.H.M. UAV-assisted dynamic clustering of wireless sensor networks for crop health monitoring. Sensors 2018, 18, 555. [Google Scholar] [CrossRef] [Green Version]
- Okcu, H.; Soyturk, M. Distributed clustering approach for UAV integrated wireless sensor networks. Int. J. Ad Hoc Ubiquitous Comput. 2014, 15, 106–120. [Google Scholar] [CrossRef]
- Zanjie, H.; Hiroki, N.; Nei, K.; Fumie, O.; Ryu, M.; Baohua, Z. Resource Allocation for Data Gathering in UAV-Aided Wireless Sensor Networks. In Proceedings of the 2014 4th IEEE International Conference on Network Infrastructure and Digital Content, Beijing, China, 19–21 September 2014; pp. 11–16. [Google Scholar]
- Albu-Salih, A.T.; Seno, S.A.H. Energy-efficient data gathering framework-based clustering via multiple UAVs in deadline-based WSN applications. IEEE Access 2018, 6, 72275–72286. [Google Scholar] [CrossRef]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.H.; Assi, C. Data Collection in Wireless Sensor Networks Using UAV and Compressive Data Gathering. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar]
- Zema, N.R.; Mitton, N.; Ruggeri, G. Using location services to autonomously drive flying mobile sinks in wireless sensor networks. In Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, Proceedings of the International Conference on Ad Hoc Networks, Rhodes, Greece, 18–19 August 2014; Springer: Cham, Switzerland, 2015; pp. 180–191. [Google Scholar]
- Caillouet, C.; Giroire, F.; Razafindralambo, T. Efficient data collection and tracking with flying drones. Ad Hoc Netw. 2019, 89, 35–46. [Google Scholar] [CrossRef] [Green Version]
- Popescu, D.; Dragana, C.; Stoican, F.; Ichim, L.; Stamatescu, G. A collaborative UAV-WSN network for monitoring large areas. Sensors 2018, 18, 4202. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Zhou, Q.; Cheng, C.T. A UAV-assisted topology-aware data aggregation protocol in WSN. Phys. Commun. 2019, 34, 48–57. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Zhang, S. A framework for using unmanned aerial vehicles for data collection in linear wireless sensor networks. J. Intell. Robot. Syst. 2014, 74, 437–453. [Google Scholar] [CrossRef]
- Villas, L.A.; Guidoni, D.L.; Maia, G.; Pazzi, R.W.; Ueyama, J.; Loureiro, A.A. An energy efficient joint localization and synchronization solution for wireless sensor networks using unmanned aerial vehicle. Wirel. Netw. 2015, 21, 485–498. [Google Scholar] [CrossRef]
- Baek, J.; Han, S.I.; Han, Y. Energy-efficient UAV routing for wireless sensor networks. IEEE Trans. Veh. Technol. 2019, 69, 1741–1750. [Google Scholar] [CrossRef]
- Gong, J.; Chang, T.H.; Shen, C.; Chen, X. Flight time minimization of UAV for data collection over wireless sensor networks. IEEE J. Sel. Areas Commun. 2018, 36, 1942–1954. [Google Scholar] [CrossRef] [Green Version]
- Ho, D.T.; Grøtli, E.I.; Sujit, P.; Johansen, T.A.; De Sousa, J.B. Performance Evaluation of Cooperative Relay and Particle Swarm Optimization Path planning for UAV and Wireless Sensor Network. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1403–1408. [Google Scholar]
- Teh, S.; Mejias Alvarez, L.; Corke, P.; Hu, W. Experiments in integrating autonomous uninhabited aerial vehicles (UAVs) and wireless sensor networks. In Proceedings of the 2008 Australasian Conference on Robotics and Automation; Australian Robotics & Automation Association: Canberra, Australia, 2008; pp. 1–10. [Google Scholar]
- Sharma, A.; Singh, P.K.; Sharma, A.; Kumar, R. An efficient architecture for the accurate detection and monitoring of an event through the sky. Comput. Commun. 2019, 148, 115–128. [Google Scholar] [CrossRef]
- Cobano, J.; Alejo, D.; Heredia, G.; Martinez-de Dios, J.; Ollero, A. Efficient collision-free trajectory planning for WSN data collection with Unmanned Aerial Vehicles. IFAC Proc. Vol. 2013, 46, 220–225. [Google Scholar] [CrossRef]
- Basagni, S.; Carosi, A.; Melachrinoudis, E.; Petrioli, C.; Wang, Z.M. Controlled sink mobility for prolonging wireless sensor networks lifetime. Wirel. Netw. 2008, 14, 831–858. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, R.; Liu, Q.; Thompson, J.S.; Kadoch, M. Energy-efficient data collection and device positioning in UAV-assisted IoT. IEEE Internet Things J. 2019, 7, 1122–1139. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J. UAV-Based Data Communication in Wireless Sensor Networks: Models and Strategies. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 687–694. [Google Scholar]
- Somasundara, A.A.; Kansal, A.; Jea, D.D.; Estrin, D.; Srivastava, M.B. Controllably mobile infrastructure for low energy embedded networks. IEEE Trans. Mob. Comput. 2006, 5, 958–973. [Google Scholar] [CrossRef]
- Poudel, S.; Moh, S. Energy-Efficient and fast MAC protocol in UAV-Aided wireless sensor networks for Time-Critical applications. Sensors 2020, 20, 2635. [Google Scholar] [CrossRef]
- Harounabadi, M.; Mitschele-Thiel, A. Applying message forwarding and replication to multi-UAV message ferry networks. Mob. Netw. Appl. 2018, 23, 1337–1346. [Google Scholar] [CrossRef]
- Mao, J.; Jiang, X.; Zhang, X. Analysis of node deployment in wireless sensor networks in warehouse environment monitoring systems. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 1–15. [Google Scholar] [CrossRef] [Green Version]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).