There is currently a great deal of interest in the development and implementation of infrastructures and applications for Smart Cities. A Smart City is a complex system, whose ultimate goal is to make cities more attractive and sustainable, which is supported by an intensive use of ICTs (Information and Communication Technology), providing various digital services that help to achieve these objectives. Therefore, heterogeneous technologies must be combined, even when some of them have not been sufficiently proven. The work presented in [
1] highlights how the IoT (Internet of Things) is still in an evolutionary phase and must still face many challenges, including interoperability between agents and devices (due to heterogeneity), economic aspects, problems related to mobility and dynamism (mobility-related problem), and the standardization of solutions and technologies. These needs are also analysed in [
2], where the standards are reviewed (there are more than 1800 related standards) with the different definitions of the Smart City concept, including data and use cases, and the differences and similarities between different international organizations. The need for new technologies for this environment is highlighted, and there is a particular need for more robust ICT infrastructures. There is also talk of digital exclusion from society, i.e., users who are difficult to reach, either because of social exclusion or because they are too young or too old (although Bluetooth technology can be an advantage in this respect, as it is integrated in many common devices such as cell phones or tablets). In [
3], a bibliometric study on IoT research and applications in Smart Cities is carried out, identifying seven fundamental lines of research. One of these lines is mobile connectivity, although these authors consider it to be basically focused on 5G technologies.
In [
4], the potential of BLE (Bluetooth Low Energy) in the field of Smart Cities, mainly for proximity-based services, is analysed, highlighting the security problems that BLE suffers from. In [
5], the use of BLE in Smart City applications is justified, extending the concept and use of PAN (Personal Area Network) to cities. This requires direct interaction between users and objects. These Smart objects can be considered to be CPS (Cyber Physical Systems) because of the ability to handle a physical interface of specific city equipment added to a limited computational capacity to communicate with a specific set of protocols. Other applications of BLE in Smart Cities are in the field of energy [
6], healthcare [
7], smart carparks [
8], alert systems [
9], vehicle-pedestrian collision warning systems [
10] and location/positioning of pedestrians [
11]. In [
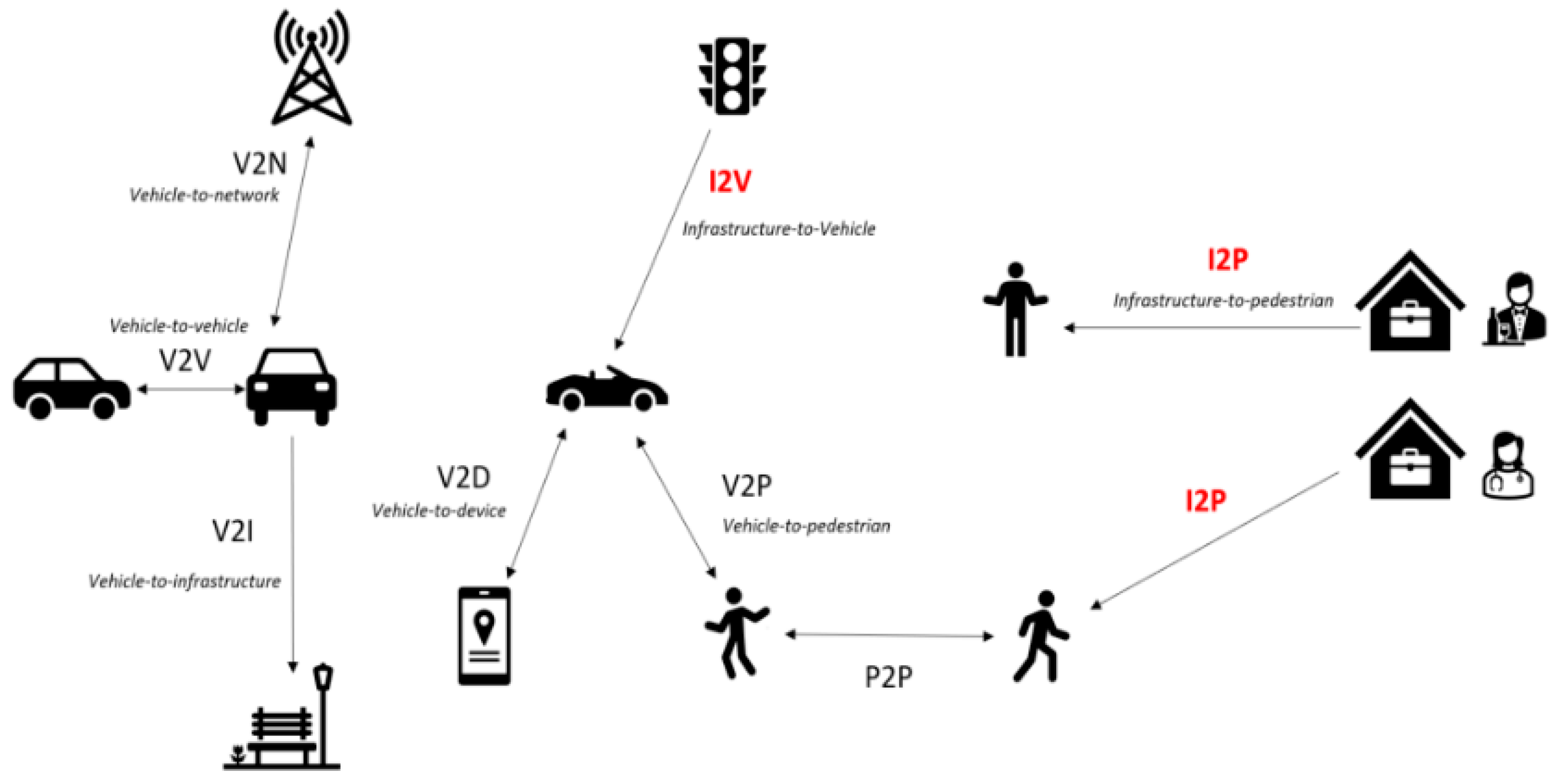
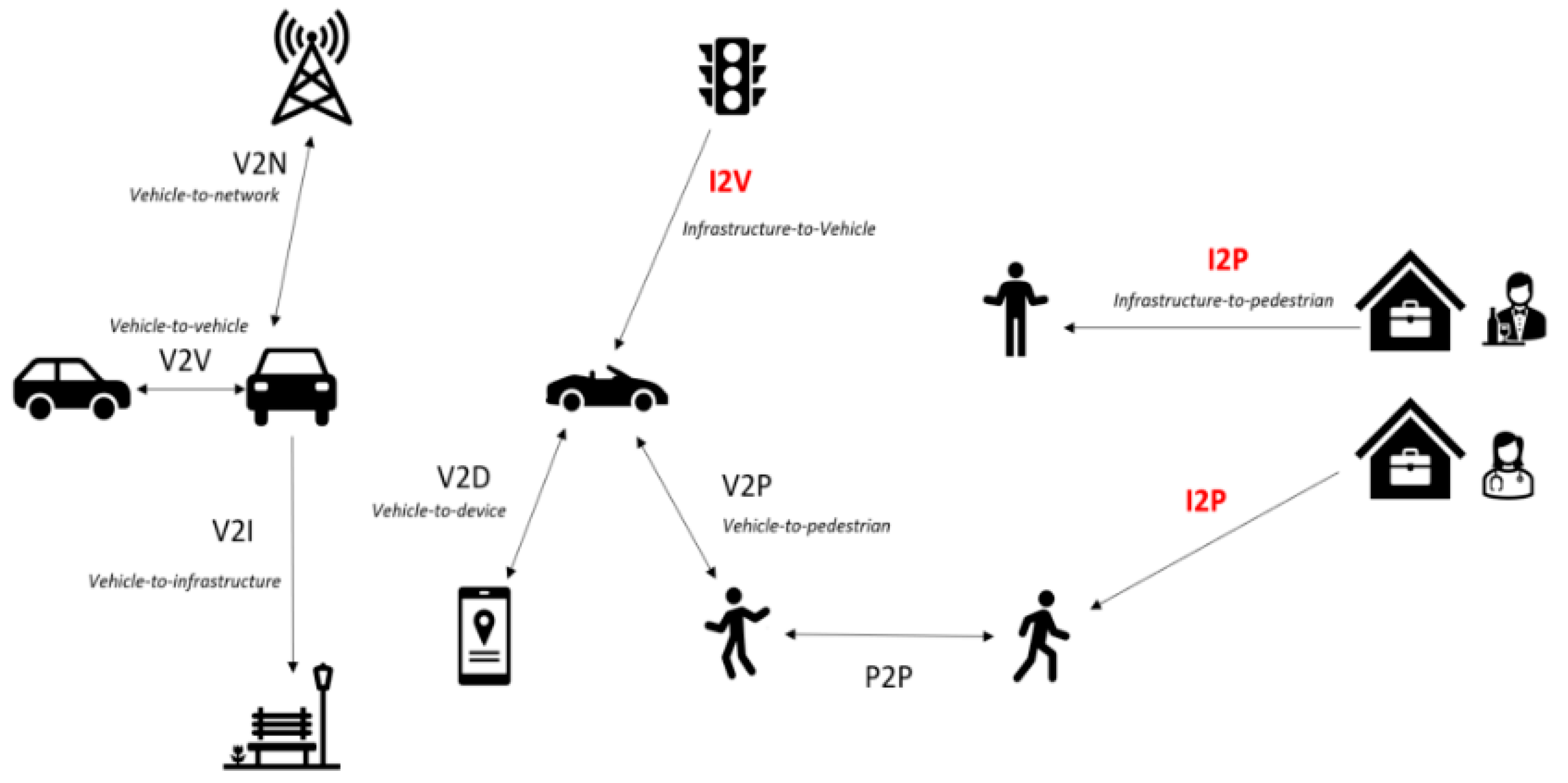
12], the use of BLE in I2V (Infrastructure to Vehicle) applications is analysed (and extended in this work). V2X (Vehicle to Everything) applications are one of the most promising technologies in the field of ITS (Intelligent Transport Systems) and can be considered as another element of Smart Cities. It is considered that V2X applications can be classified into the following categories [
13]: infotainment; traffic efficiency; traffic safety; cooperative driving. Among these categories, traffic efficiency applications are aimed at improving the flow of road traffic, such as intersection coordination or congestion management. An example of the types of communication in these environments is shown in
Figure 1.
While some of these applications may require low latency communications, others have less demanding requirements [
14], and they can be classified as non-safety applications such as congestion warning, service finder, TLVC (Traffic-Light-To-Vehicle Communication), or CACC (Cooperative Adaptive Cruise Control)—exactly the kind of applications on which this work is focused. Thus, BLE can be an alternative in I2V-V2I-I2P (Infrastructure Vehicle-Vehicle to Infrastructure-Infrastructure to Pedestrian) environments and other Smart City applications compared to other more complex, and expensive, solutions. In fact, one of the biggest advantages offered by BLE is that it does not require previous infrastructure, as well as having a strong market penetration and wide availability. BLE is commonly used in electronics and vehicle devices, which makes this technology an ideal candidate for use in I2V applications, with respect to other new technologies, such as DSRC (Dedicated Short-Range Communications) [
15,
16], in which no infrastructure is needed to support these non-safety applications. Another possible use of BLE is its application in Inter-vehicular Communications. In [
17], its robustness in different scenarios, such as a V2V system, is analysed but only focuses on BLE 4.x version not using the new protocol updates, limiting the potential range of applications. In [
13], different access technologies for this type of environment are analysed, highlighting classic Bluetooth as a viable technology for intra-vehicle infotainment system applications but systematically discarding it for other areas, considering an operating range (personal operating space) of 10 m for this version of the protocol and the difficulties in establishing connections with respect to other vehicles (vehicles approaching). However, unlike classic Bluetooth, the emergence of BLE, offering much wider communication range and the possibility of implementing information broadcasting applications (where it is not necessary to complete the process of establishing a connection pair), enables this technology in these types of applications [
15,
16]. From this point of view, the use of BLE as an I2V communication network has been analysed in different scenarios, using its 4.0 version but in a connection-based communication mode [
18]. The work in [
19] compares BLE 4.0 and Zigbee for this type of application, indicating the greater stability and robustness of Zigbee but highlighting that it is a much less widespread technology with a much shorter range and speed than BLE [
20]. Nevertheless, these studies are focused on BLE connected mode and are not applicable for non-safety applications or I2V and I2P applications. An additional review of alternative V2X communications technologies can be found in [
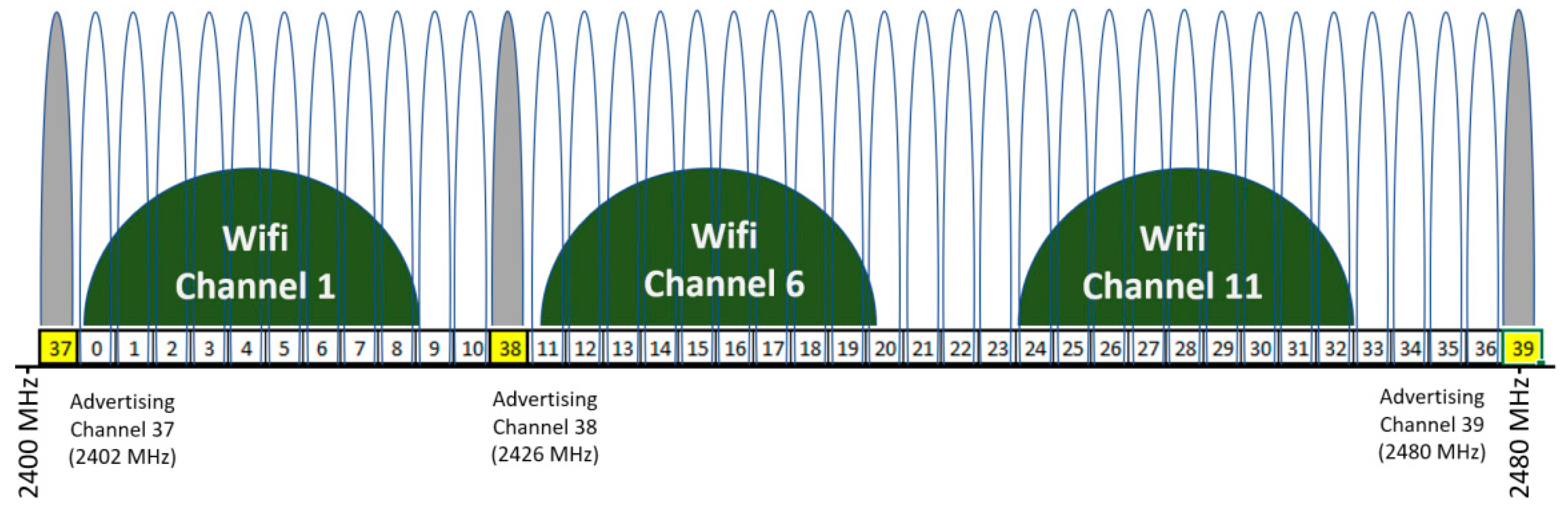
16], highlighting WiFi Halow, LTE-M, NB-IoT, and BLE 5.x as potential candidates. In [
21], the problems of coexistence of Bluetooth and 802.11 are analysed, limiting the range to 50 m, but using classic Bluetooth 2.0 and a power of only 4 dBm, which does not take advantage of the new features and performance of BLE. In [
22], distances of up to 527 m are achieved while maintaining connections, although this work also highlights the interference that can be caused by conventional elements in cities, such as trees, which can limit the distance to below 100 m. Finally, although the networks that will support ITS technologies are still subject to study, development, and testing [
23], the analysis and tests carried out in this work are in agreement with the authors of [
16]. They indicate that BLE is a technology with huge potential to significantly improve safety conditions in the Smart Cities and roads of the future [
24] (“Smart flexible ubiquitous hybrid vehicle networks based on IoT and 5G communication, which are able to use any type of available communication, is a promising concept to significantly improve road safety in the future”).
The aim of this work is to analyse the use of BLE over these kinds of environments and, in particular, over connectionless applications for information transmission. The maturity and low cost of the technology could enable fast, easy deployment in comparison to other solutions. Due to the availability of the technology on mobile phones, laptops, car infotainment devices, etc., with no additional modifications, new I2V and Smart Cities applications could benefit from its use.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}