
Educational Low-Cost C-Band FMCW Radar System Comprising Commercial Off-the-Shelf Components for Indoor Through-Wall Object Detection



Abstract
:1. Introduction
2. FMCW Radar System for Through-Wall Metal Detection
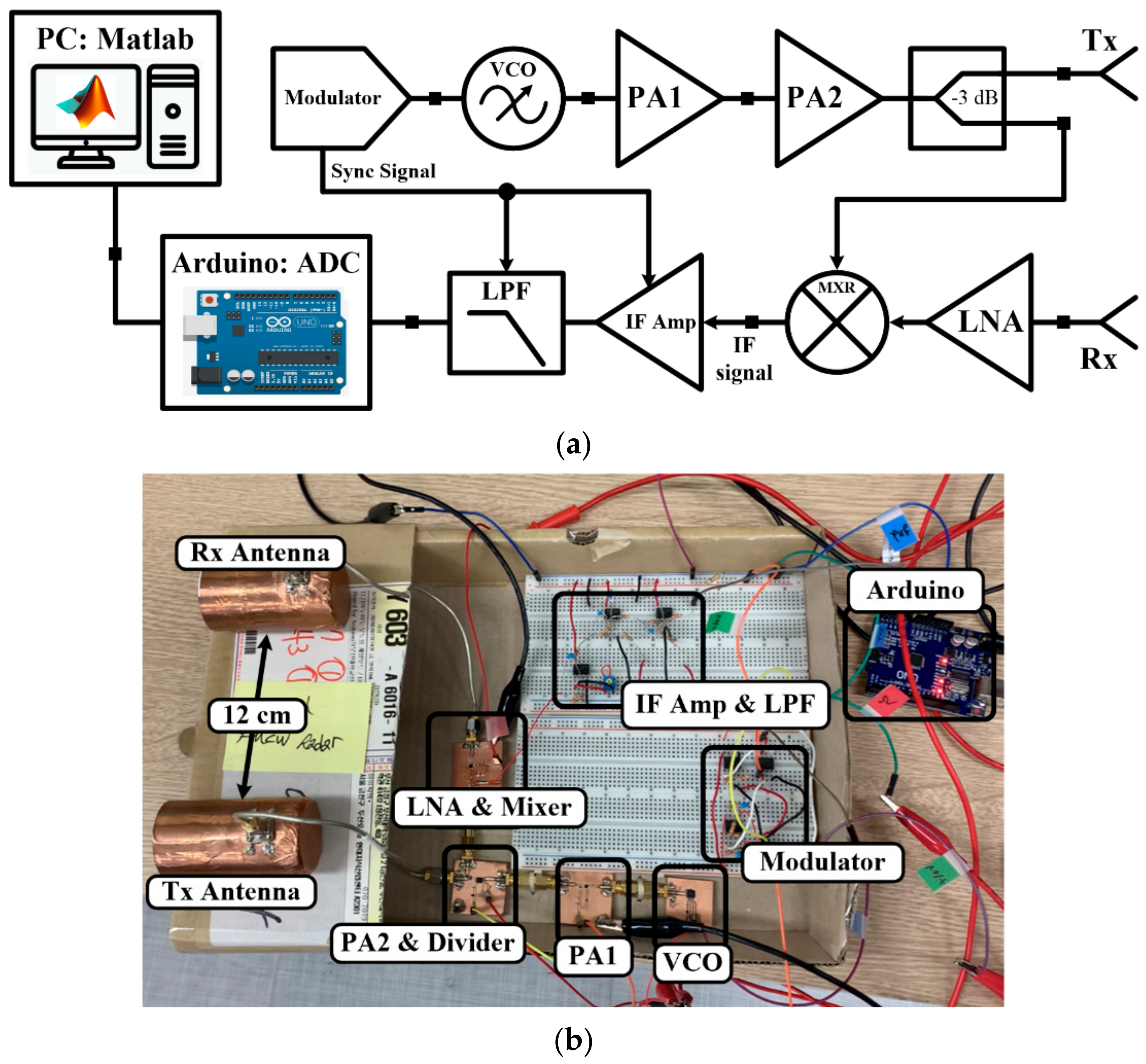
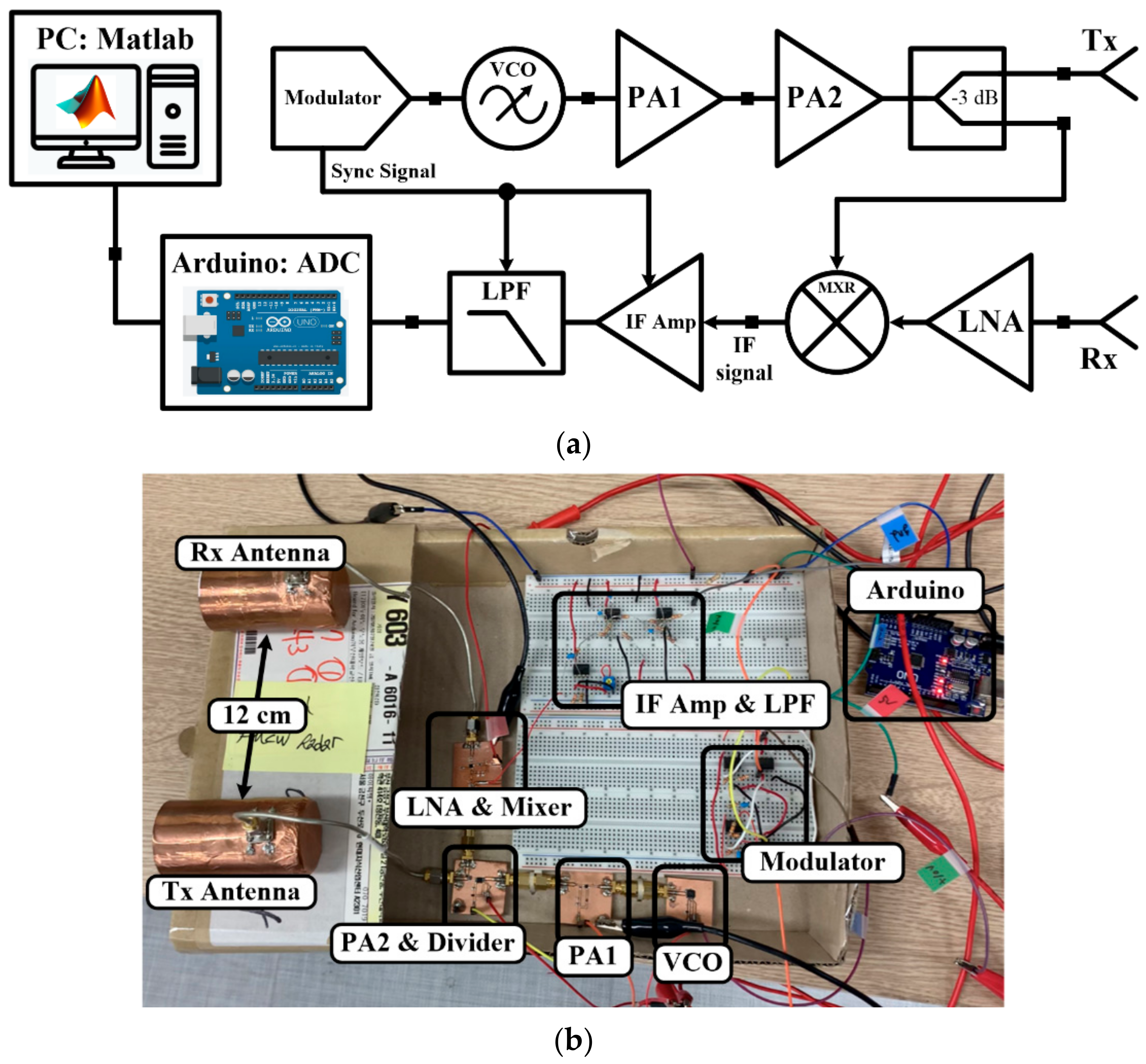
2.1. Low-Cost FMCW Radar System
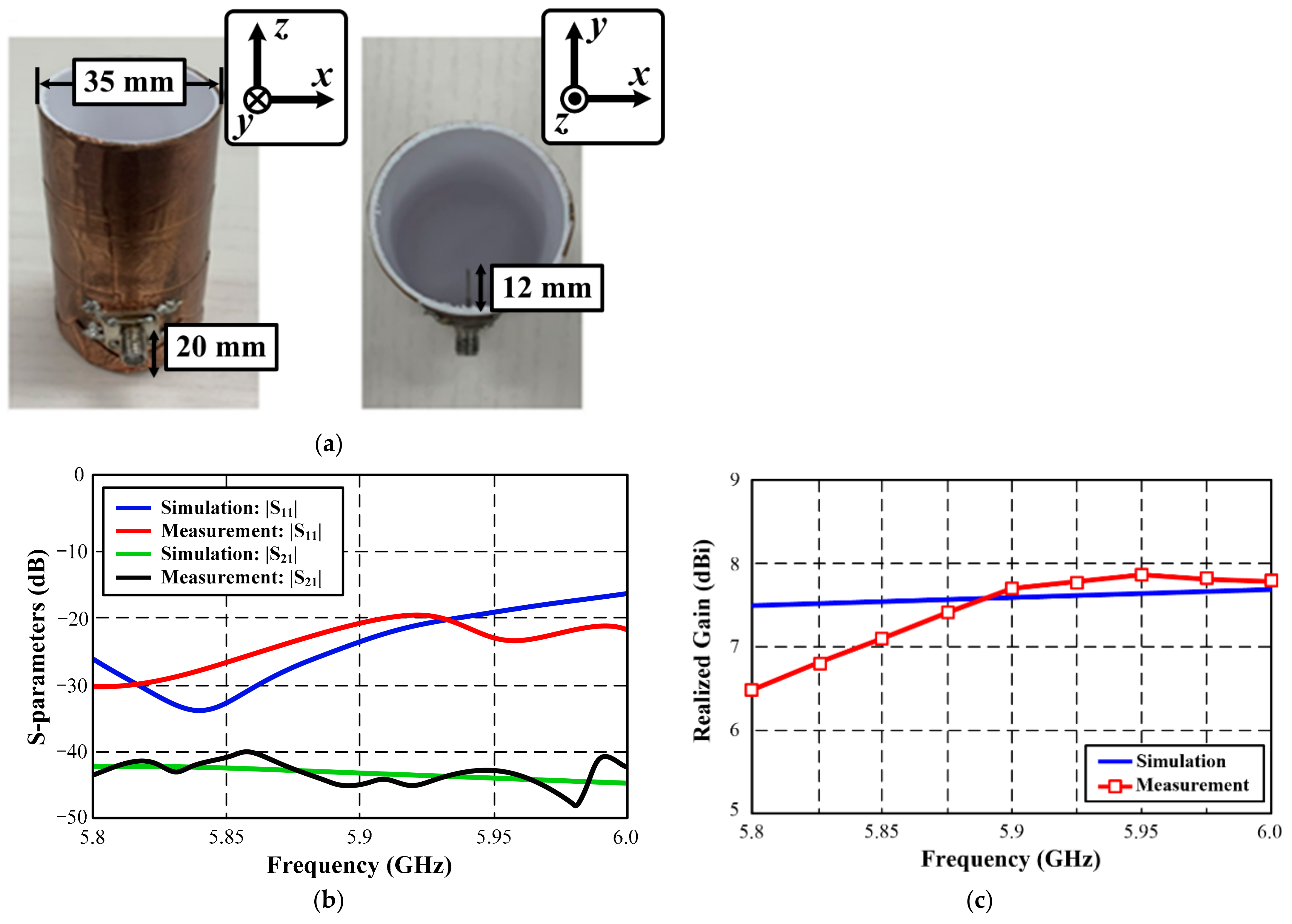
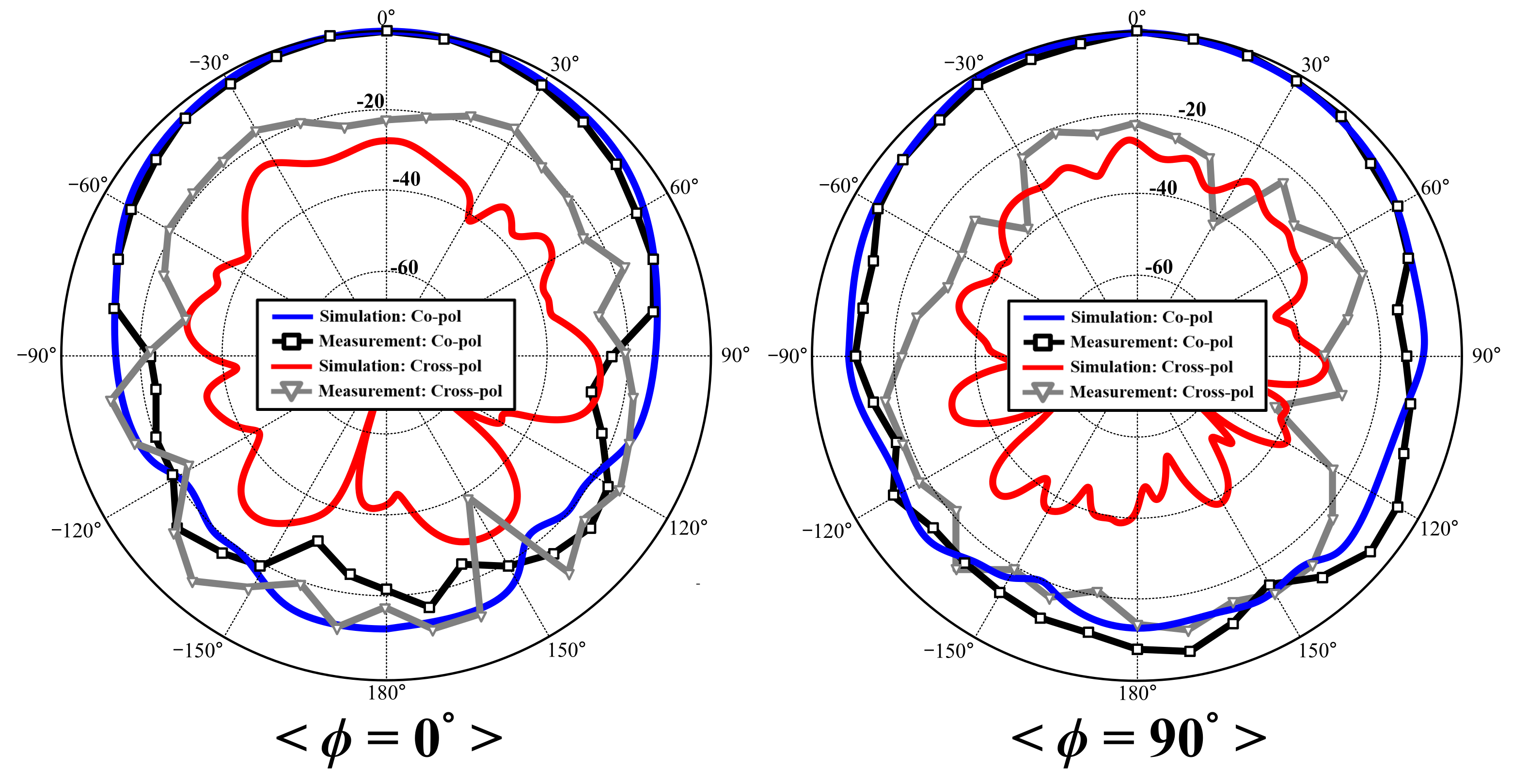
2.2. Antenna Design
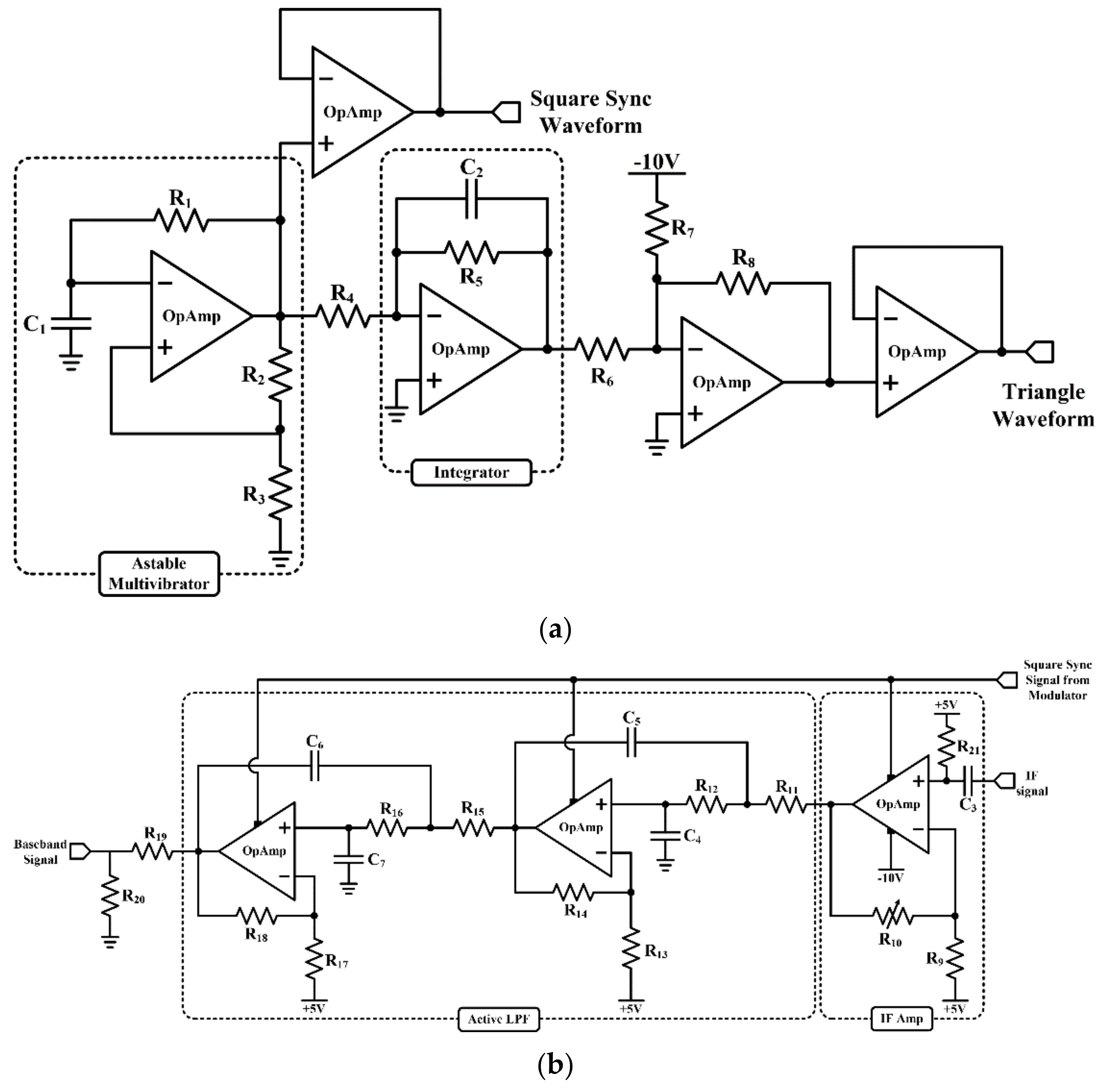
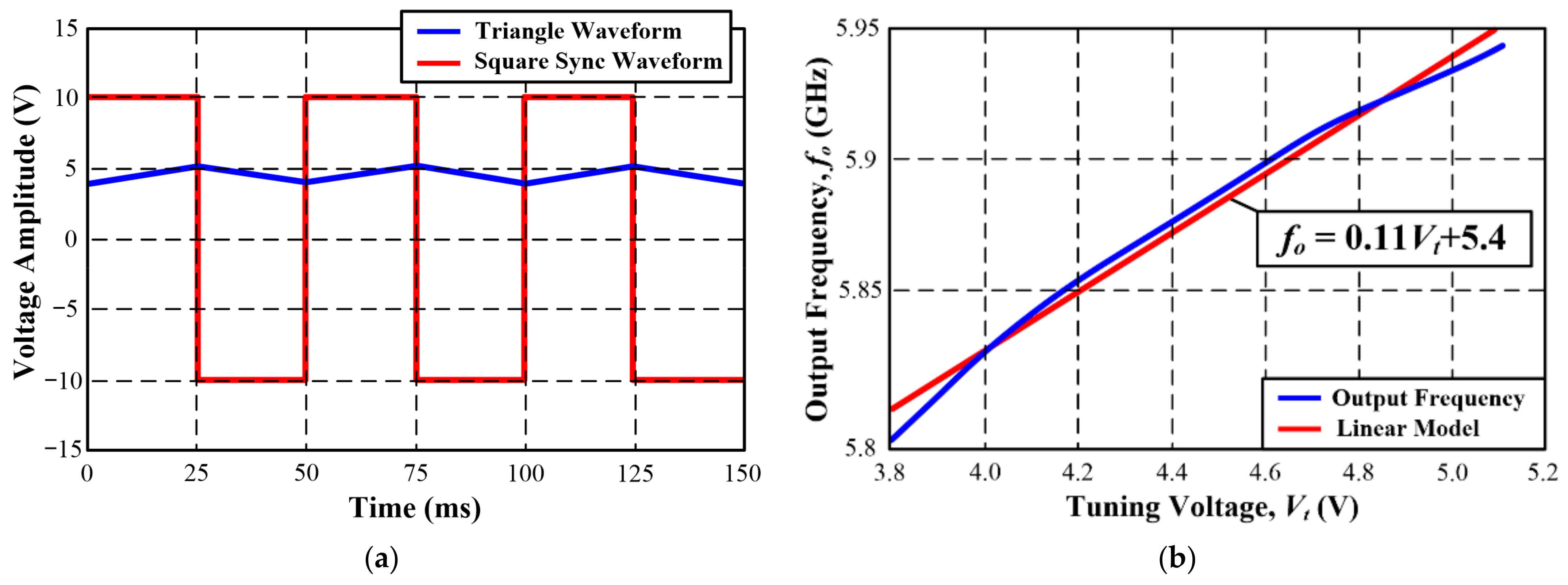
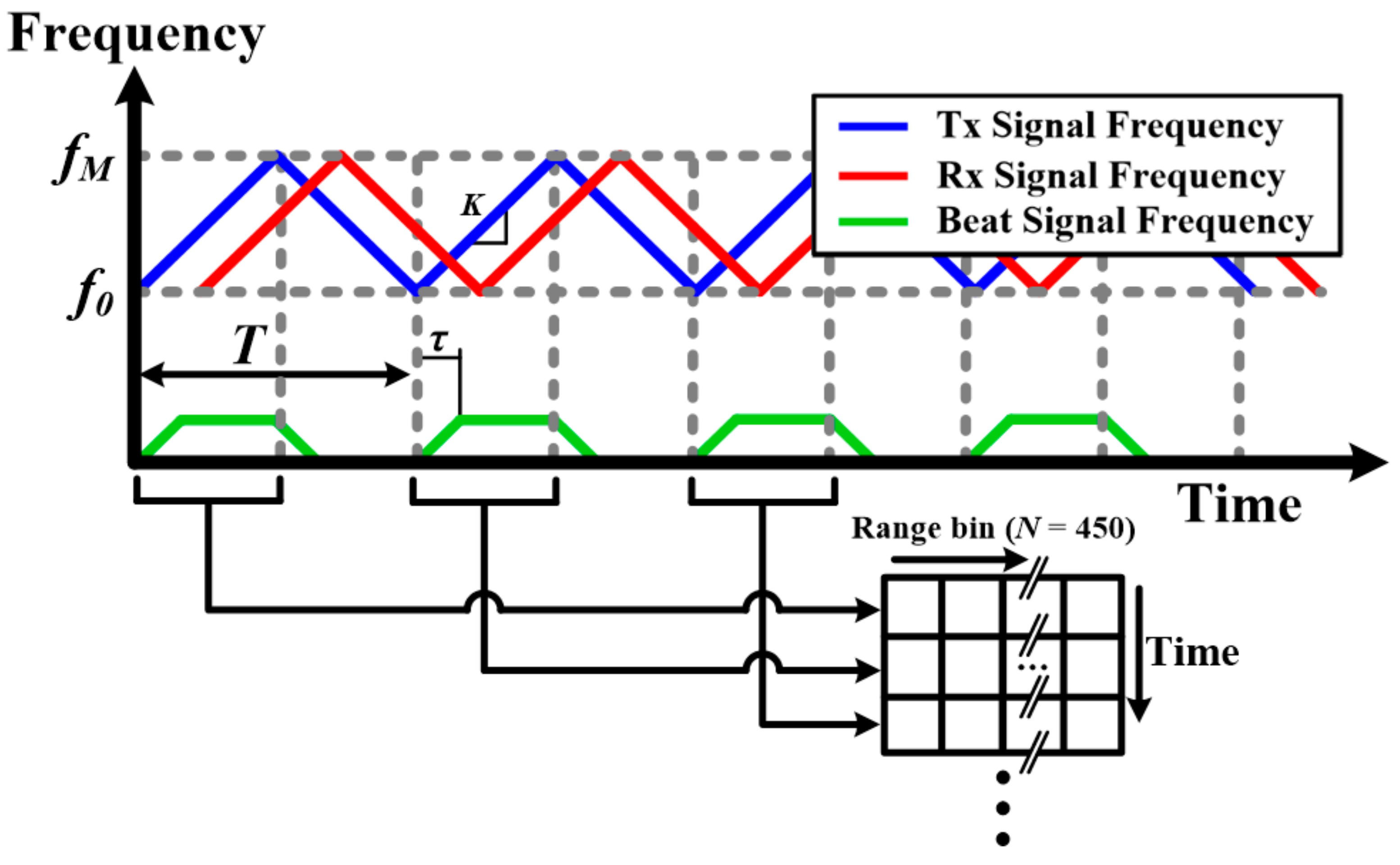
2.3. Operating Principle of Proposed FMCW Radar
3. Experimental Results
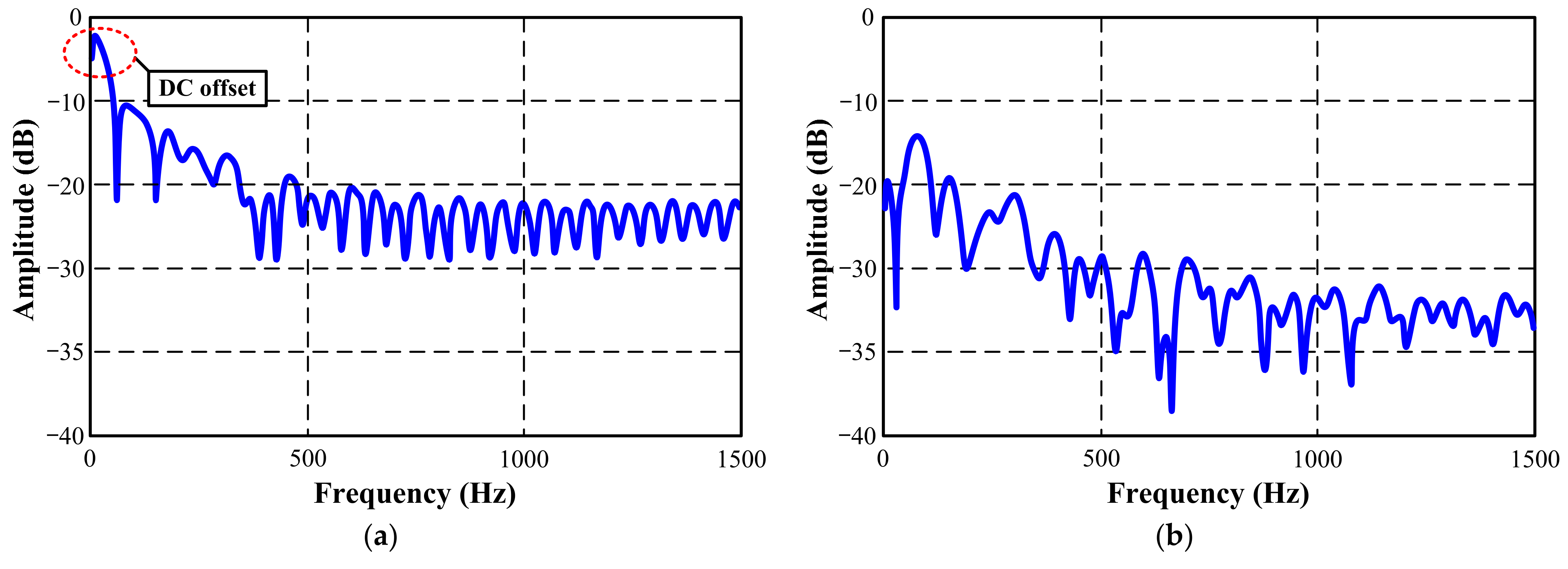
3.1. Indoor FMCW Radar Measurement
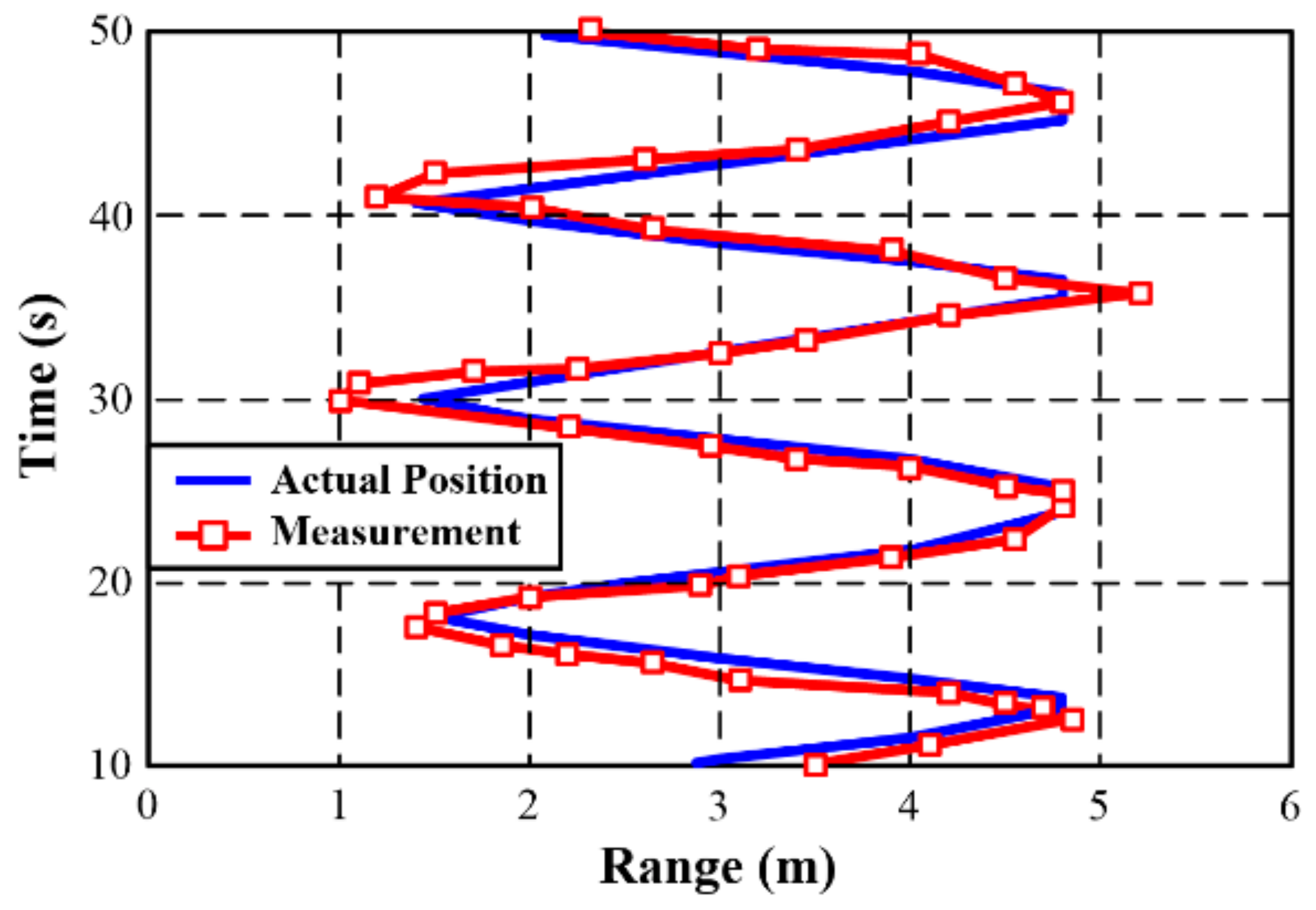
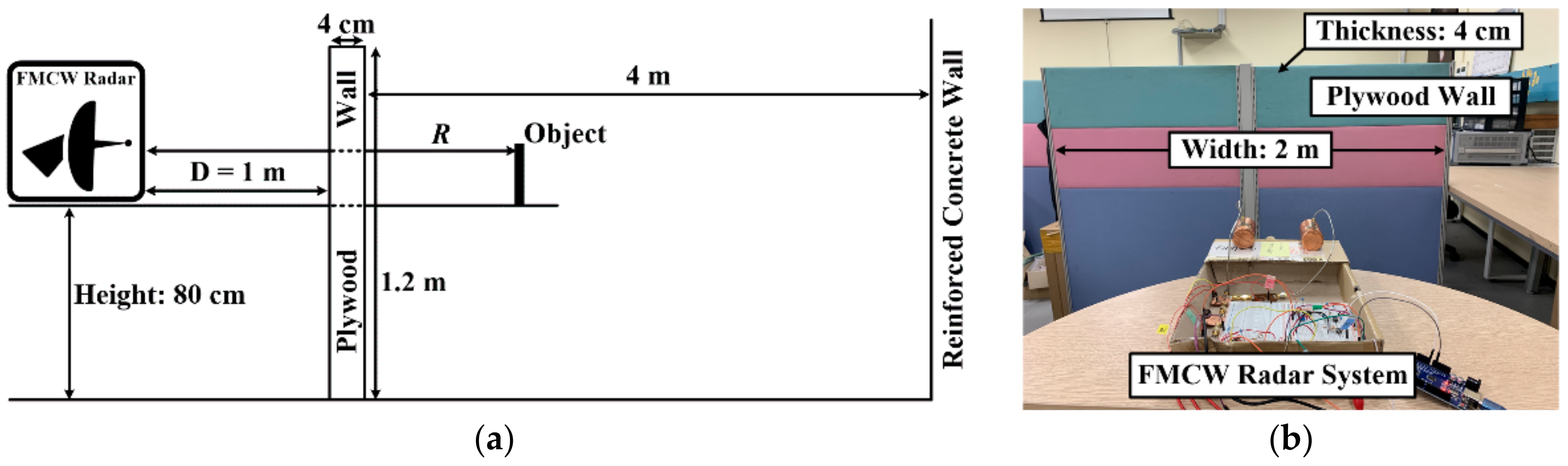
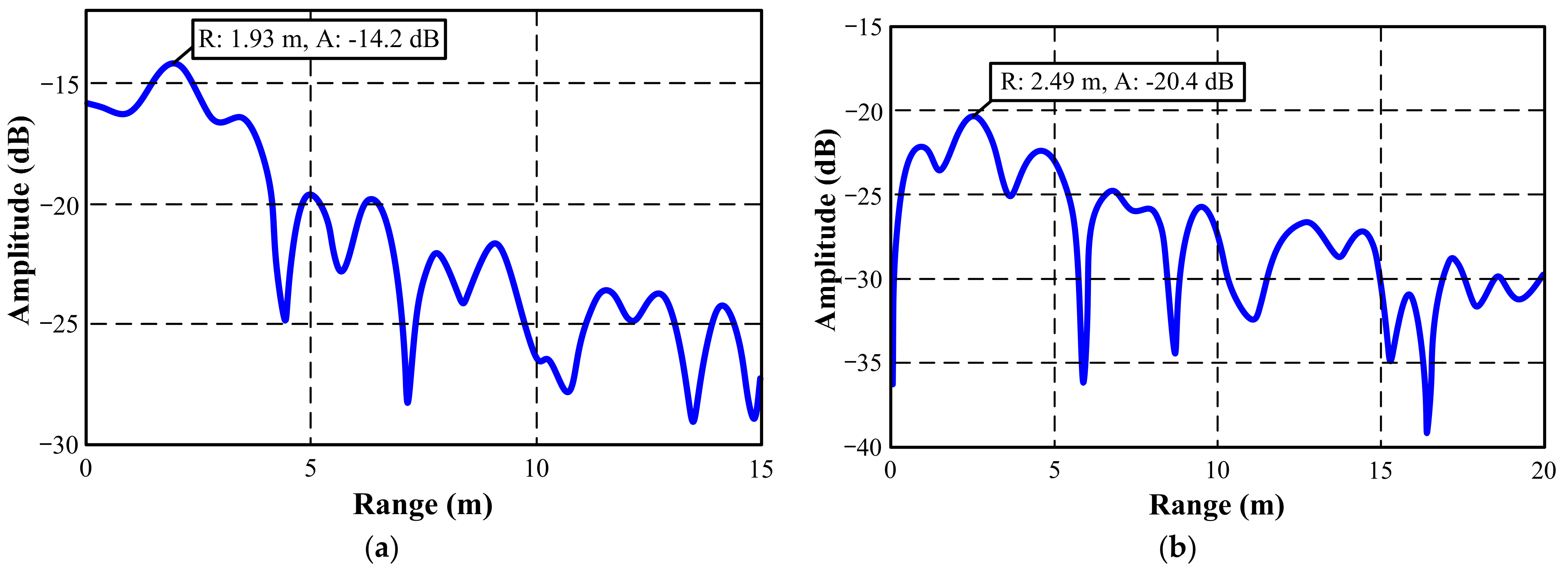
3.2. Through-Wall Detection
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Conflicts of Interest
References
- Luong, N.C.; Lu, X.; Hoang, D.T.; Niyato, D.; Kim, D.I. Radio Resource Management in Joint Radar and Communication: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2021, 23, 780–814. [Google Scholar] [CrossRef]
- Sarkar, T.K.; Palma, M.S.; Mokole, E.L. Echoing Across the Years. IEEE Microw. Mag. 2016, 17, 46–60. [Google Scholar] [CrossRef]
- Cardillo, E.; Li, C.; Caddemi, A. Embedded Heating, Ventilation, and Air Conditioning Control Systems: From Traditional Technologies Towards Radar Advanced Sensing. Rev. Sci. Instrum. 2021, 92, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Cardillo, E.; Caddemi, A. Insight on Electronic Travel Aids for Visually Impaired People: A Review on the Electromagnetic Technology. Electronics 2019, 8, 1281. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.; Zhu, Z.; Liang, B. Vital Sign Signal Extraction Method Based on Permutation Entropy and EEMD Algorithm for Ultra-Wideband Radar. IEEE Access 2019, 7, 178879–178890. [Google Scholar] [CrossRef]
- Yang, D.; Zhu, Z.; Zhang, J.; Liang, B. The Overview of Human Localization and Vital Sign Signal Measurement Using Handheld IR-UWB Through-Wall Radar. Sensors 2021, 21, 402. [Google Scholar] [CrossRef]
- Hodges, R.E.; Chen, J.C.; Radway., M.R.; Amaro., L.R.; Khayatian, B.; Munger, J. An Extremely Large Ka-Band Reflectarray Antenna for Interferometric Synthetic Aperture Radar. IEEE Antennas Propag. Mag. 2020, 62, 23–33. [Google Scholar] [CrossRef]
- Adrian, O. M3R AESA Technology for Extended Air Defense. IEEE Aerosp. Electron. Syst. Mag. 2010, 23, 11–16. [Google Scholar] [CrossRef]
- Porras, M.J.P.; Bertuch, T.; Loecker, C.; Adams, R.; Wunderlich, R.; Heinen, S. An AESA Antenna Comprising an RF Feeding Network with Strongly Coupled Antenna Ports. IEEE Trans. Antennas Propag. 2015, 63, 182–194. [Google Scholar] [CrossRef]
- Park, J.K.; Hong, Y.; Lee, H.; Jang, C.; Yun, G.H.; Lee, H.J.; Yook, J.G. Noncontact RF Vital Sign Sensor for Continuous Monitoring of Driver Status. IEEE Trans. Biomed. Circuits Syst. 2019, 13, 493–502. [Google Scholar] [CrossRef]
- Mazzinghi, A.; Freni, A.; Agostini, A.; Bossio, L.; Albani, M. Industrial Antenna Development for 77-GHz Level-Crossing Monitoring Radar. IEEE Antennas Propag. Mag. 2018, 60, 95–106. [Google Scholar] [CrossRef]
- Toker, O.; Alsweiss, S. Design of a Cyberattack Resilient 77 GHz Automotive Radar Sensor. Electronics 2020, 9, 573. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Zhao, J.; Zhang, F.; Zhang, L.; Yang, T.; Li, Q.; Pan, S. Photonics-Based Radar-Lidar Integrated System for Multi-Sensor Fusion Applications. IEEE Sens. J. 2020, 20, 15068–15078. [Google Scholar] [CrossRef]
- Akanm, O.B.; Arik, M. Internet of Radars: Sensing versus Sending with Joint Radar-Communications. IEEE Commun. Mag. 2020, 58, 13–19. [Google Scholar]
- Jankiraman, M. FMCW Radar Design; Artech House: Norwood, MA, USA, 2008. [Google Scholar]
- Ryu, S.J.; Suh, J.S.; Baek, S.H.; Hong, S.; Kim, J.H. Feature-Based Hand Gesture Recognition Using an FMCW Radar and Its Temporal Feature Analysis. IEEE Sens. J. 2018, 18, 7593–7602. [Google Scholar] [CrossRef]
- Park, K.; Lee, J.; Kim, Y. Deep Learning-Based Indoor Two-Dimensional Localization Scheme Using a Frequency-Modulated Continuous Wave Radar. Electronics 2021, 10, 2166. [Google Scholar] [CrossRef]
- Maitra, S.; Gartley, M.G.; Kerekes, J.P. A Low-Cost Laboratory-Based Polarimetric Synthetic Aperture Radar System for Scattering Analysis. IEEE Antennas Propag. Mag. 2017, 59, 130–141. [Google Scholar] [CrossRef]
- Peng, Z.; Li, C. Portable Microwave Radar Systems for Short-range Localization and Life Tracking: A Review. Sensors 2019, 19, 1136. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Li, P.; Wang, M.; Yang, D.; Shi, C. A Flexible, Efficient and Low-cost Experimental Platform for FMCW Radars. Sensor Rev. 2019, 39, 495–503. [Google Scholar] [CrossRef]
- Build a Small Radar System Capable of Sensing Range, Doppler, and Synthetic Aperture Radar Imaging. Available online: https://ocw.mit.edu/resources/res-ll-003-build-a-small-radar-system-capable-of-sensing-range-doppler-and-synthetic-aperture-radar-imaging-january-iap-2011/ (accessed on 9 November 2021).
- Llorens, J.L.S.; Merino, J.J.G.; Benabdeloued, B.Y.N.; Cintas, S.R.; Zamora, J.O.; Caturla, J.J.G. Design and Implementation of an Arduino-Based Plug-and-Play Acquisition System for Seismic Noise Measurements. Electronics 2019, 8, 1035. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.M.; Choi, Y.; Suh, J. Applications of the Open-Source Hardware Arduino Platform in the Mining Industry: A Review. Appl. Sci. 2020, 10, 5018. [Google Scholar] [CrossRef]
- Lin, Y.W.; Lin, Y.B.; Yang, M.T.; Lin, J.H. ArduTalk: An Arduino Network Application Development Platform Based on IoTtalk. IEEE Syst. J. 2017, 13, 168–476. [Google Scholar] [CrossRef]
- Dhingra, S.; Madda, R.B.; Gandomi, A.H.; Patan, R.; Daneshmand, M. Internet of Things Mobile–Air Pollution Monitoring System (IoT-Mobair). IEEE Internet Things J. 2019, 6, 5577–5584. [Google Scholar] [CrossRef]
- HMC431LP4/431LP4E Datasheet. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/hmc431.pdf (accessed on 9 November 2021).
- GRF2505 Datasheet. Available online: https://www.guerrilla-rf.com/products/detail/sku/GRF2505 (accessed on 9 November 2021).
- HMC407MS8G/407MS8GE Datasheet. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/hmc407.pdf (accessed on 9 November 2021).
- PD4856 Datasheet. Available online: https://www.mouser.com/ProductDetail/Anaren/PD4859J5050S2HF?qs=61pwXRo0i5ij 9Ns6s%2Fy2Jw%3D%3D (accessed on 9 November 2021).
- QPL9503 Datasheet. Available online: https://www.qorvo.com/products/d/da006028 (accessed on 9 November 2021).
- HMC218b Datasheet. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/hmc218b.pdf (accessed on 9 November 2021).
- TLE2062 Datasheet. Available online: https://www.ti.com/product/TLE2062 (accessed on 9 November 2021).
- Cormack, G.D.; Blair, D.A.; McMullin, J.N. Enhanced Spectral Resolution FFT for Step-like Signals. IEEE Trans. Instrum. Meas. 1991, 40, 34–36. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Passive Components | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| R1 | 22 kΩ | R2 | 10 kΩ | R3 | 10 kΩ | R4 | 51 kΩ | R5 | 510 kΩ |
| R6 | 4.3 kΩ | R7 | 2.2 kΩ | R8 | 1 kΩ | R9 | 220 Ω | R10 | 10 kΩ |
| R11 | 6.8 kΩ | R12 | 6.8 kΩ | R13 | 12.1 kΩ | R14 | 1 kΩ | R15 | 6.8 kΩ |
| R16 | 6.8 kΩ | R17 | 1.62 kΩ | R18 | 2 kΩ | R19 | 47 kΩ | R20 | 47 kΩ |
| R21 | 10 kΩ | C1 | 1 μF | C2 | 1 μF | C3 | 1 μF | C4 | 10 nF |
| C5 | 10 nF | C6 | 10 nF | C7 | 10 nF | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, H.; Kim, S. Educational Low-Cost C-Band FMCW Radar System Comprising Commercial Off-the-Shelf Components for Indoor Through-Wall Object Detection. Electronics 2021, 10, 2758. https://doi.org/10.3390/electronics10222758
Jeong H, Kim S. Educational Low-Cost C-Band FMCW Radar System Comprising Commercial Off-the-Shelf Components for Indoor Through-Wall Object Detection. Electronics. 2021; 10(22):2758. https://doi.org/10.3390/electronics10222758
Chicago/Turabian StyleJeong, Hyunmin, and Sangkil Kim. 2021. "Educational Low-Cost C-Band FMCW Radar System Comprising Commercial Off-the-Shelf Components for Indoor Through-Wall Object Detection" Electronics 10, no. 22: 2758. https://doi.org/10.3390/electronics10222758
APA StyleJeong, H., & Kim, S. (2021). Educational Low-Cost C-Band FMCW Radar System Comprising Commercial Off-the-Shelf Components for Indoor Through-Wall Object Detection. Electronics, 10(22), 2758. https://doi.org/10.3390/electronics10222758