
Output-Based Tracking Control for a Class of Car-Like Mobile Robot Subject to Slipping and Skidding Using Event-Triggered Mechanism


Abstract
:1. Introduction
2. Preliminaries and Problem Formulation
2.1. Dynamic Model of CLMR
2.2. Control Objective
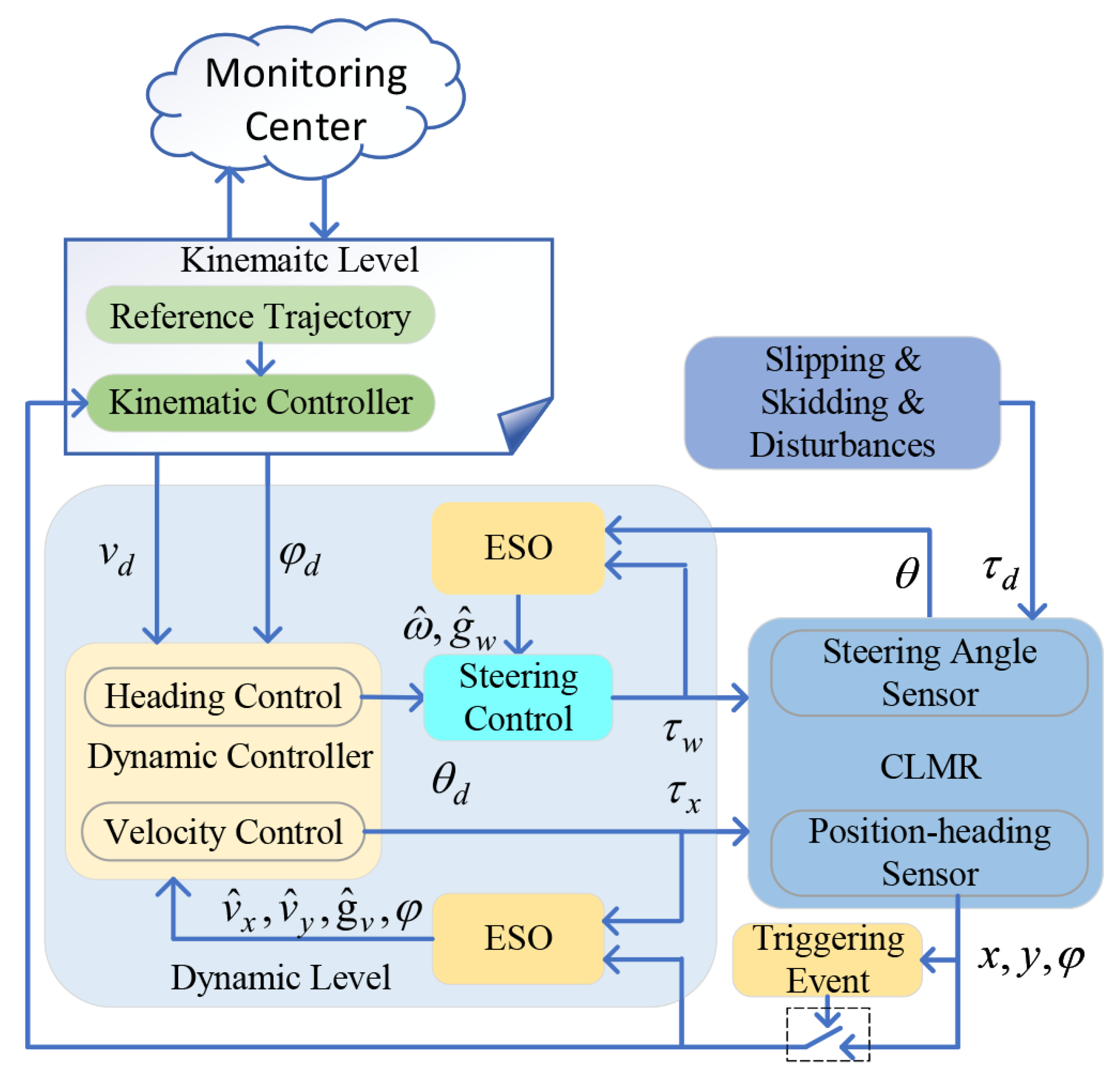
3. Controller Design
3.1. Kinematic Controller for Position
3.2. Dynamic Controller for Velocity
3.3. Dynamic Controller for Heading
4. Stability Analysis
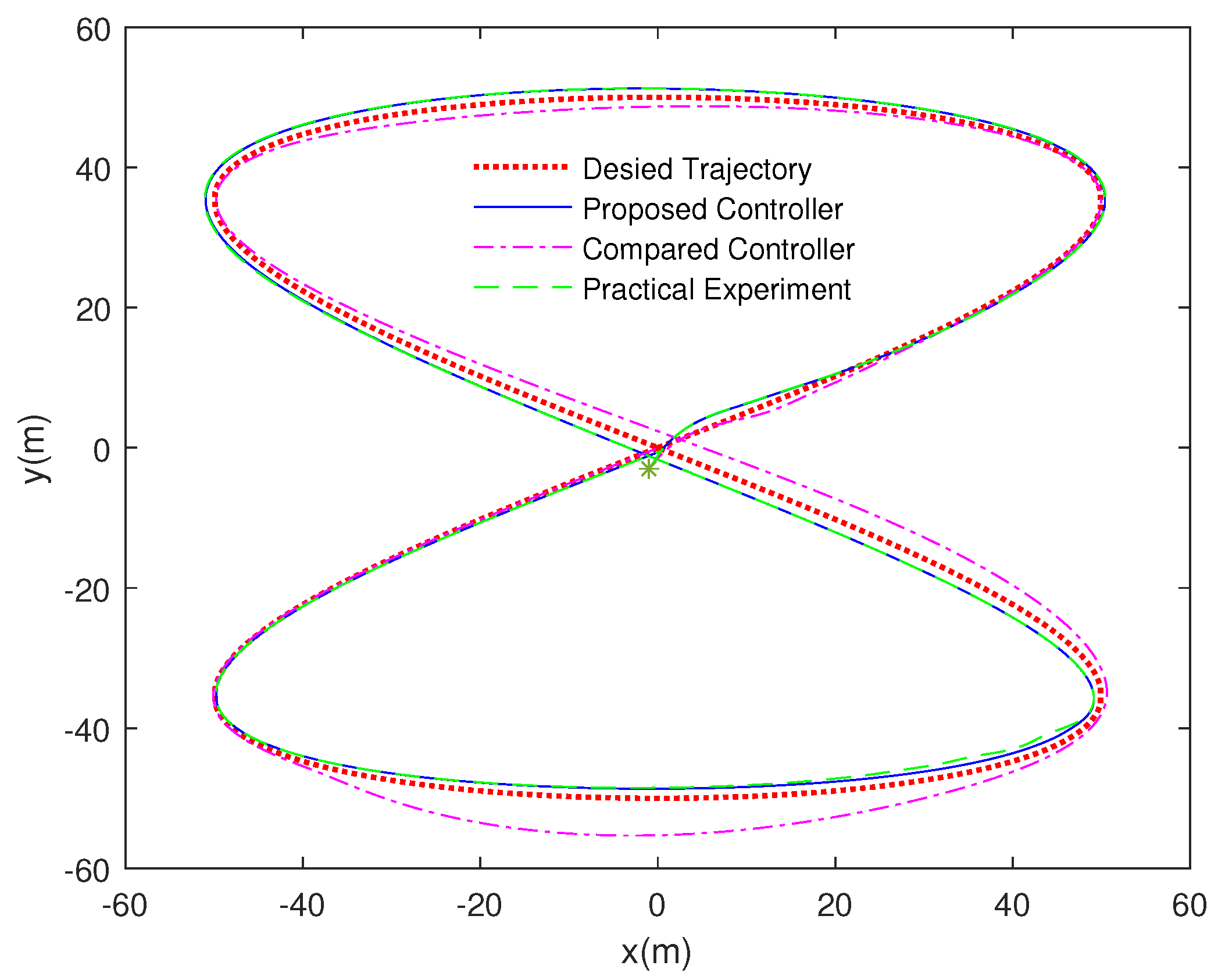
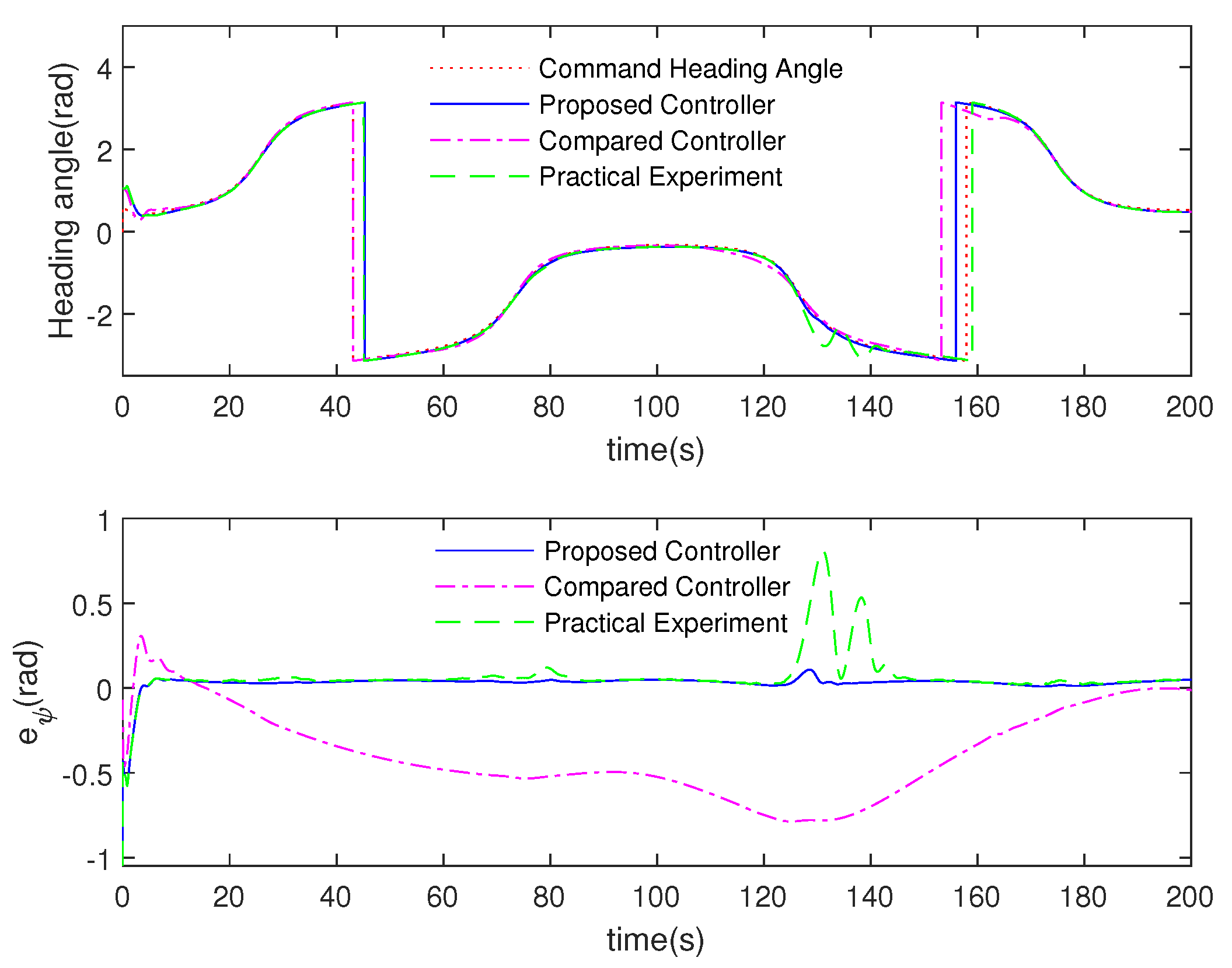
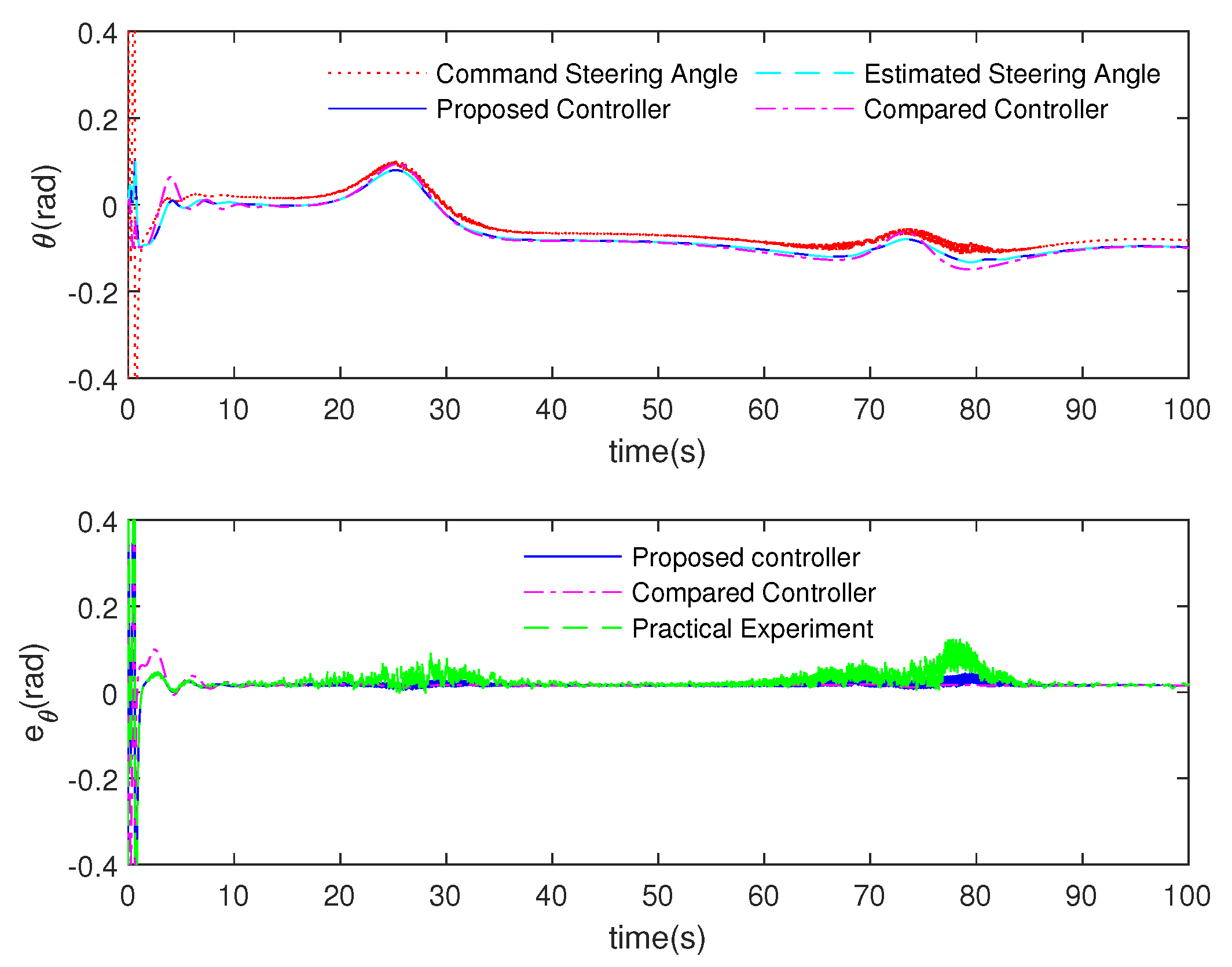
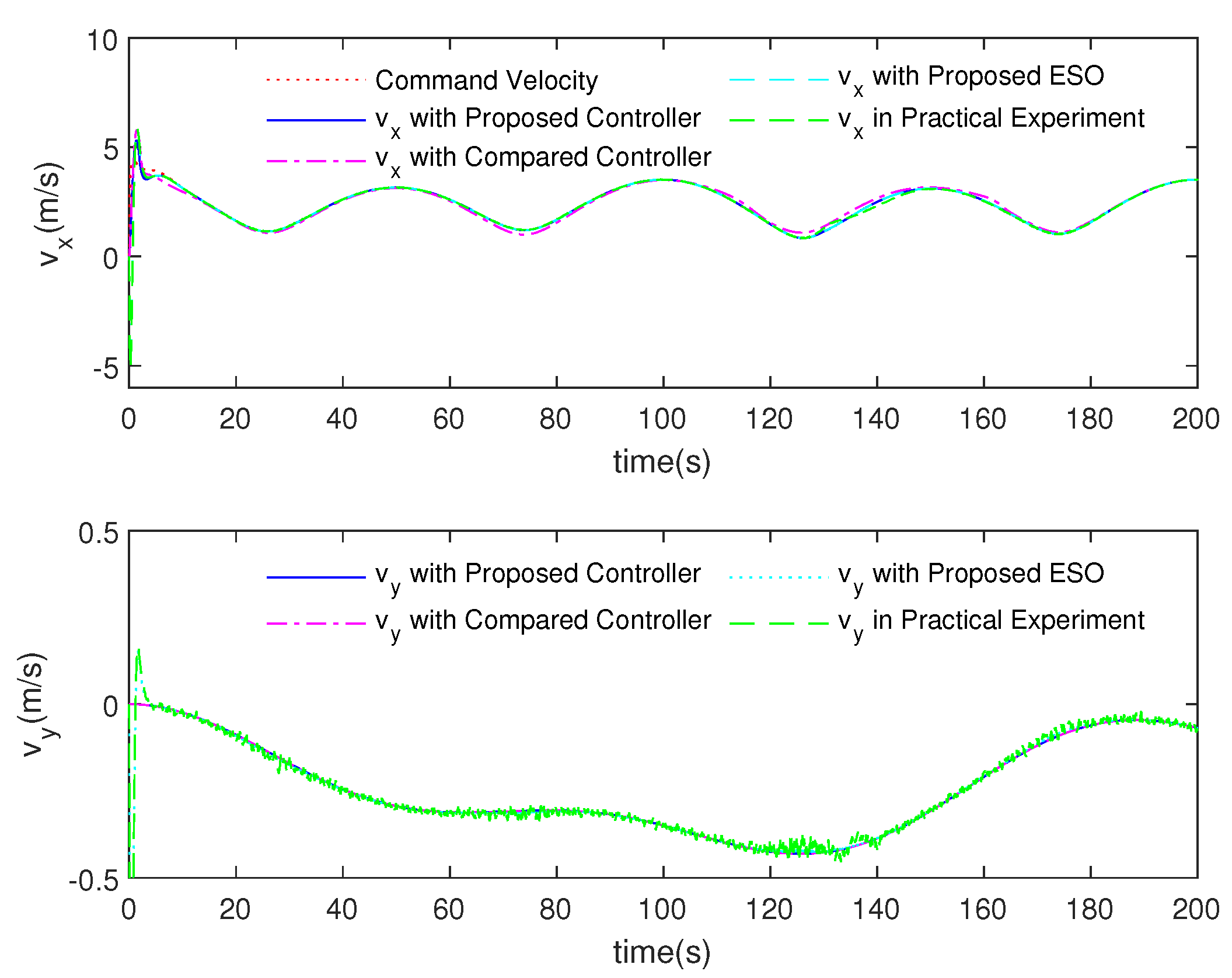
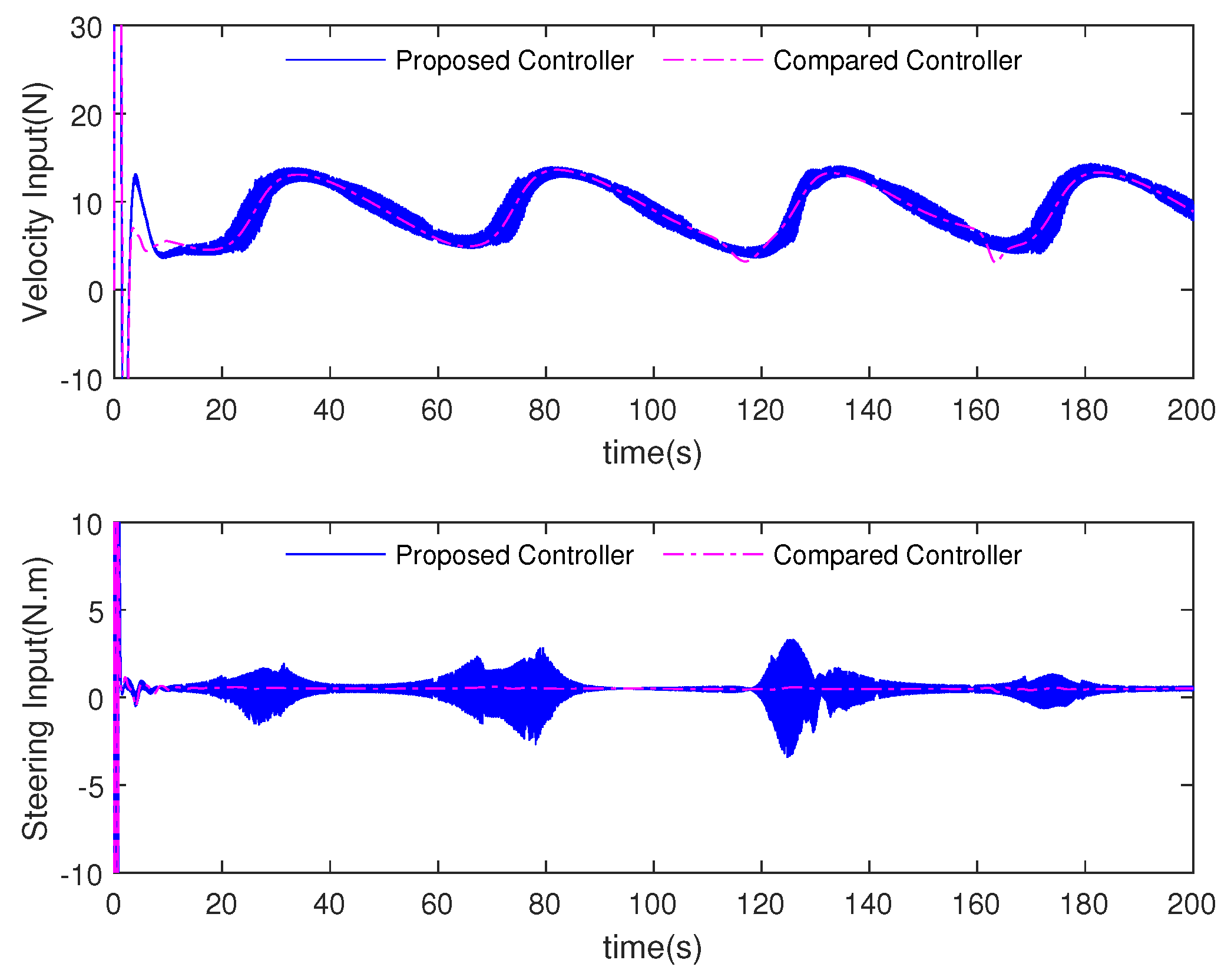
5. Experiment and Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Lenain, R.; Thuilot, B.; Cariou, C.; Martinet, P. Adaptive and predictive non linear control for sliding vehicle guidance: Application to trajectory tracking of farm vehicles relying on a single RTK GPS. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; IEEE: Sendai, Japan, 2004; pp. 455–460. [Google Scholar]
- Aliyu, A.; Kolo, J.G.; Mikail, O.O.; Agajo, J.; Umar, B.; Aguagba, O.I. An ultrasonic sensor distance induced automatic braking automobile collision avoidance system. In Proceedings of the 2017 IEEE 3rd International Conference on Electro-Technology for National Development (NIGERCON), Owerri, Nigeria, 7–10 November 2017; IEEE: Owerri, Nigeria, 2017; pp. 570–576. [Google Scholar]
- Wang, L.; Liu, M. Path tracking control for autonomous harvesting robots based on improved double arc path planning algorithm. J. Intell. Robot. Syst. 2020, 100, 899–909. [Google Scholar] [CrossRef]
- Amer, N.H.; Zamzuri, H.; Hudha, K.; Kadir, Z.A. Modelling and control strategies in path tracking control for autonomous ground vehicles: A review of state of the art and challenges. J. Intell. Robot. Syst. 2017, 86, 225–254. [Google Scholar] [CrossRef]
- Zhu, S.; Aksun-Guvenc, B. Trajectory planning of autonomous vehicles based on parameterized control optimization in dynamic on-road environments. J. Intell. Robot. Syst. 2020, 100, 1055–1067. [Google Scholar] [CrossRef]
- Premachandra, C.; Gohara, R.; Ninomiya, T.; Kato, K. Smooth Automatic Stopping for Ultra-Compact Vehicles. IEEE Trans. Intell. Veh. 2019, 4, 561–568. [Google Scholar] [CrossRef]
- Low, C.B.; Wang, D. GPS-based path following control for a car-like wheeled mobile robot with skidding and slipping. IEEE Trans. Control Syst. Technol. 2008, 16, 340–347. [Google Scholar]
- Low, C.B.; Wang, D. GPS-based tracking control for a car-like wheeled mobile robot with skidding and slipping. IEEE/ASME Trans. Mechatron. 2008, 13, 480–484. [Google Scholar]
- Kumar, U.; Sukavanam, N. Backstepping based trajectory tracking control of a four wheeled mobile robot. Int. J. Adv. Robot. Syst. 2008, 5, 403–410. [Google Scholar] [CrossRef]
- Wang, C.; Wang, D.; Peng, Z. Coordinated formation control of car-like mobile robots guided by parameterized single path. Control Theory Appl. 2021, 38, 1124–1132. [Google Scholar]
- Gu, D.; Hu, H. Neural predictive control for a car-like mobile robot. Robot. Auton. Syst. 2002, 39, 73–86. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, W.; Chen, Y.; Ke, F.; Chu, X.; Chen, C.L.P. Neural-dynamic optimization-based model predictive control for tracking and formation of nonholonomic multirobot systems. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 6113–6122. [Google Scholar] [CrossRef] [PubMed]
- Hwang, C.; Chang, L.; Yu, Y. Network-based fuzzy decentralized sliding-mode control for car-like mobile robots. IEEE Trans. Ind. Electron. 2007, 54, 574–585. [Google Scholar] [CrossRef]
- Hwang, C. Comparison of path tracking control of a car-like mobile robot with and without motor dynamics. IEEE/ASME Trans. Mechatron. 2016, 21, 1801–1811. [Google Scholar] [CrossRef]
- Chen, C.; Gao, H.; Ding, L.; Li, W.; Yu, H.; Deng, Z. Trajectory tracking control of WMRs with lateral and longitudinal slippage based on active disturbance rejection control. Robot. Auton. Syst. 2018, 107, 236–245. [Google Scholar] [CrossRef]
- Chen, M. Disturbance attenuation tracking control for wheeled mobile robots with skidding and slipping. IEEE Trans. Ind. Electron. 2017, 64, 3359–3368. [Google Scholar] [CrossRef]
- Li, S.; Ding, L.; Gao, H.; Chen, C.; Liu, Z.; Deng, Z. Adaptive neural network tracking control-based reinforcement learning for wheeled mobile robots with skidding and slipping. Neurocomputing 2018, 283, 20–30. [Google Scholar] [CrossRef]
- Kang, H.; Kim, Y.; Hyun, C.; Park, M. Generalized extended state observer approach to robust tracking control for wheeled mobile robot with skidding and slipping. Int. J. Adv. Robot. Syst. 2013, 10, 1–10. [Google Scholar] [CrossRef]
- Peng, Z.; Liu, L.; Wang, J. Output-feedback flocking control of multiple autonomous surface vehicles based on data-driven adaptive extended state observers. IEEE Trans. Cybern. 2020, 51, 4611–4622. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, D.; Li, T.; Han, M. Output-feedback cooperative formation maneuvering of autonomous surface vehicles with connectivity preservation and collision avoidance. IEEE Trans. Cybern. 2020, 50, 2527–2535. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J. Output-feedback path-following control of autonomous underwater vehicles based on an extended state observer and projection neural networks. IEEE Trans. Syst. Man Cybern.-Syst. 2018, 48, 535–544. [Google Scholar] [CrossRef]
- Gu, N.; Peng, Z.; Wang, D.; Shi, Y.; Wang, T. Antidisturbance Coordinated Path-following Control of Robotic Autonomous Surface Vehicles:Theory and Experiment. IEEE/ASME Trans. Mechatron. 2019, 24, 2386–2396. [Google Scholar]
- Gu, N.; Wang, D.; Peng, Z. Observer-based finite-time control for distributed path maneuvering of underactuated unmanned surface vehicles with collision avoidance and connectivity maintenance. IEEE Trans. Syst. Man Cybern.-Syst. 2020, 51, 5105–5115. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J.; Wang, D.; Han, Q.-L. An overview of recent advances in coordinated control of multiple autonomous surface vehicles. IEEE Trans. Ind. Inform. 2021, 17, 732–745. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J.; Wang, J. Constrained control of autonomous underwater vehicles based on command optimization and disturbance estimation. IEEE Trans. Ind. Electron. 2018, 66, 3627–3635. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J.; Han, Q.-L. Path-Following Control of Autonomous Underwater Vehicles Subject to Velocity and Input Constraints via Neurodynamic Optimization. IEEE Trans. Ind. Electron. 2019, 66, 8724–8732. [Google Scholar] [CrossRef]
- Peng, Z.; Jiang, Y.; Wang, J. Event-triggered dynamic surface control of an under-actuated autonomous surface vehicle for target enclosing. IEEE Trans. Ind. Electron. 2020, 68, 3402–3412. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, D.; Wang, J. Data-driven Adaptive Disturbance Observers for Model-free Trajectory Tracking Control of Maritime Autonomous Surface Ships. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–11. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. State recovery and disturbance estimation of unmanned surface vehicles based on nonlinear extended state observers. Ocean Eng. 2019, 171, 625–632. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, W.; Wang, D.; Peng, Z. Event-triggered extended state observers design for dynamic positioning vessels subject to unknown sea loads. Ocean Eng. 2020, 209, 1–9. [Google Scholar] [CrossRef]
- Ailon, A. Simple Tracking controllers for autonomous VTOL aircraft with bounded inputs. IEEE Trans. Autom. Control 2010, 55, 737–743. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Control; Pearson: Boston, MA, USA, 2015. [Google Scholar]
- Khalil, H.K. Cascade high-gain observers in output feedback control. Automatica 2017, 80, 110–118. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol & Value |
|---|---|
| CLMR mass | |
| Inertia moment | |
| Wheelbase | |
| Kinematic controller | , |
| ET-ESO for velocity | |
| ESO for steering | , , |
| Velocity controller | , |
| Heading controller | , , , , |
| Parameter | Event-Triggered | Time-Triggered | Percentage |
|---|---|---|---|
| Compared controller | 20,000 | 20,000 | 100% |
| 5940 | 20,000 | 29.7% | |
| 3233 | 20,000 | 16.17% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Wang, D.; Pan, W.; Zhang, H. Output-Based Tracking Control for a Class of Car-Like Mobile Robot Subject to Slipping and Skidding Using Event-Triggered Mechanism. Electronics 2021, 10, 2886. https://doi.org/10.3390/electronics10232886
Wang C, Wang D, Pan W, Zhang H. Output-Based Tracking Control for a Class of Car-Like Mobile Robot Subject to Slipping and Skidding Using Event-Triggered Mechanism. Electronics. 2021; 10(23):2886. https://doi.org/10.3390/electronics10232886
Chicago/Turabian StyleWang, Changshun, Dan Wang, Weigang Pan, and Huang Zhang. 2021. "Output-Based Tracking Control for a Class of Car-Like Mobile Robot Subject to Slipping and Skidding Using Event-Triggered Mechanism" Electronics 10, no. 23: 2886. https://doi.org/10.3390/electronics10232886