
An Improved Coordinate Registration for Over-the-Horizon Radar Using Reference Sources


Abstract
:1. Introduction
- For the first time, we propose to use reference sources and their corresponding OTHR measurements to infer the ionospheric parameters using the full ionospheric model, potentially providing improvement to CR.
- Considering the complexity of the OTHR ray path equation, an MCMC-based approach is implemented to estimate the ionospheric parameters. The estimated ionospheric parameters are then used to the CR of the target of interest, leading to a significant improvement.
2. Models and Problem Formulation
2.1. The Ionospheric Electron Density Profile Model
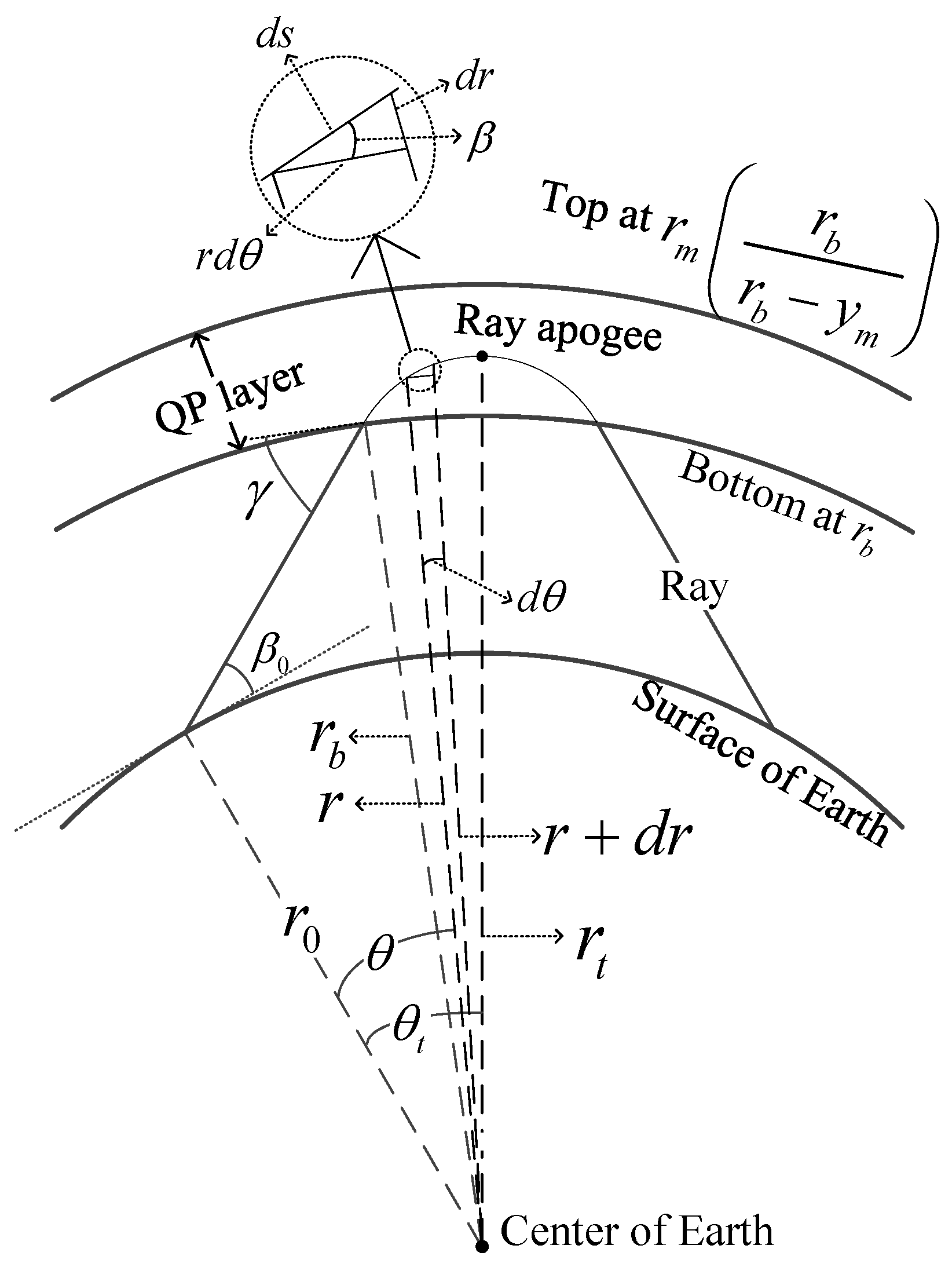
2.2. Ray Path Equations
- : ray elevation angle, i.e., the angle between ray path and the line that is parallel to the horizon;
- : initial ray elevation angle, i.e., the value of when ;
- : r at the top of the ray path;
- : the angle between the line connecting the start point of the ray to the center of the earth and the line connecting the current position of the ray to the center of the earth;
- : the angle of the ray at the bottom of the ionosphere.
2.3. Reference Sources and Targets Modeling
2.4. OTHR Measurement Modeling
2.5. Problem Formulation
3. Solutions
3.1. Derivation and Framework
- (1)
- Initialization. Using the prior distribution of the ionospheric parameters to initialize the sampler.
- (2)
- Sampling. Draw samples from the posterior PDF in Equation (21). The detailed sampling method will be descried in the following Section 3.2.
- (3)
- Burn-in. The beginning part, e.g., the first half, of the samples are throw away.
- (4)
- Thinning. Only every (e.g., ) sample is kept.
- (5)
- Convergence evaluation. Determine if the Markov chain converges to the distribution (21) based on the method will be introduced in the following Section 3.3. If the Markov chain converges, go to next step; otherwise, find alternative samplers and go to Step 2.
- (6)
- Estimation. Using Equation (22) to estimate .
3.2. ESAI Sampling
| Algorithm 1 A single update step of all walkers to sample from Equation (21) |
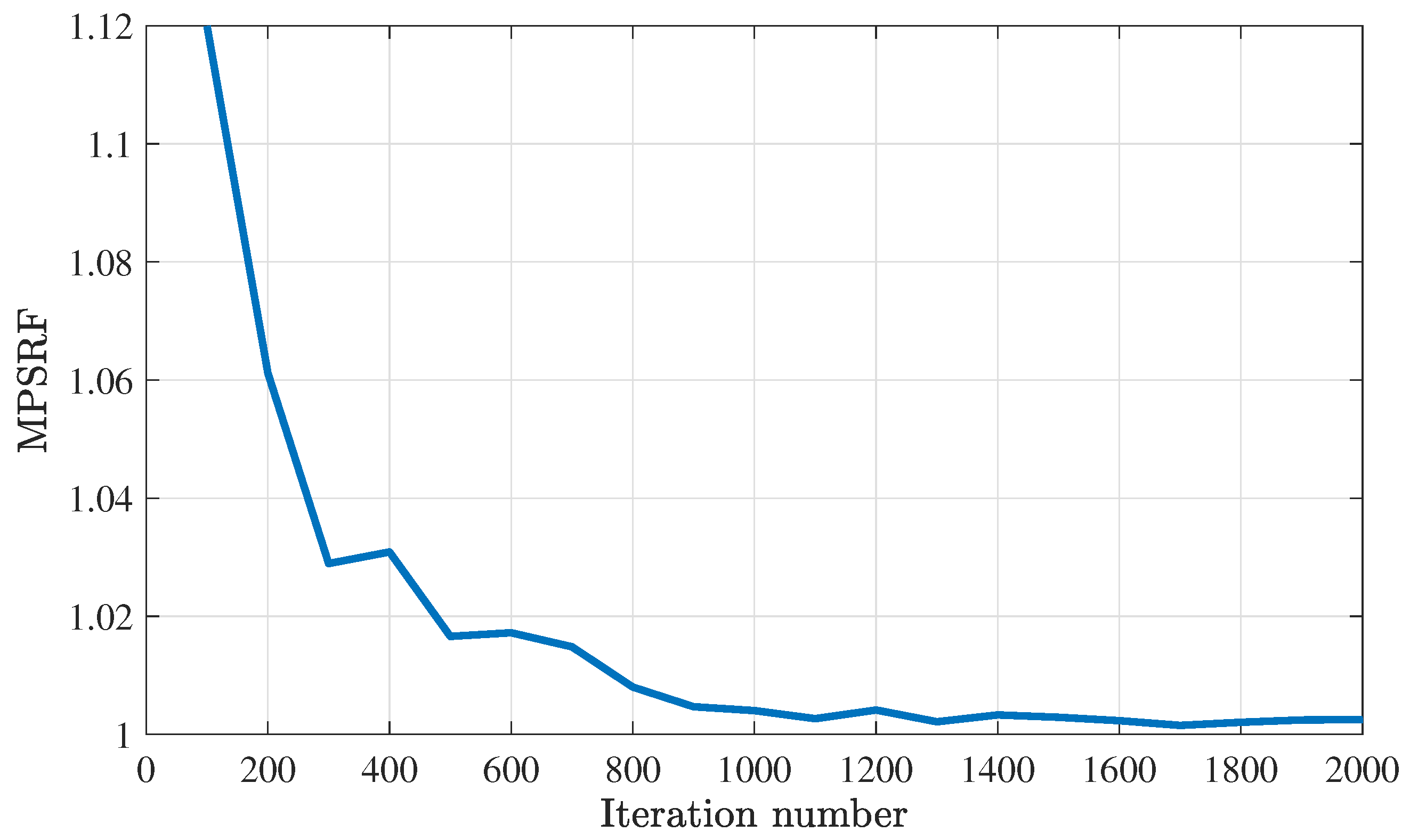
3.3. Convergence Evaluation
4. Simulation and Analysis
4.1. Scenario Settings
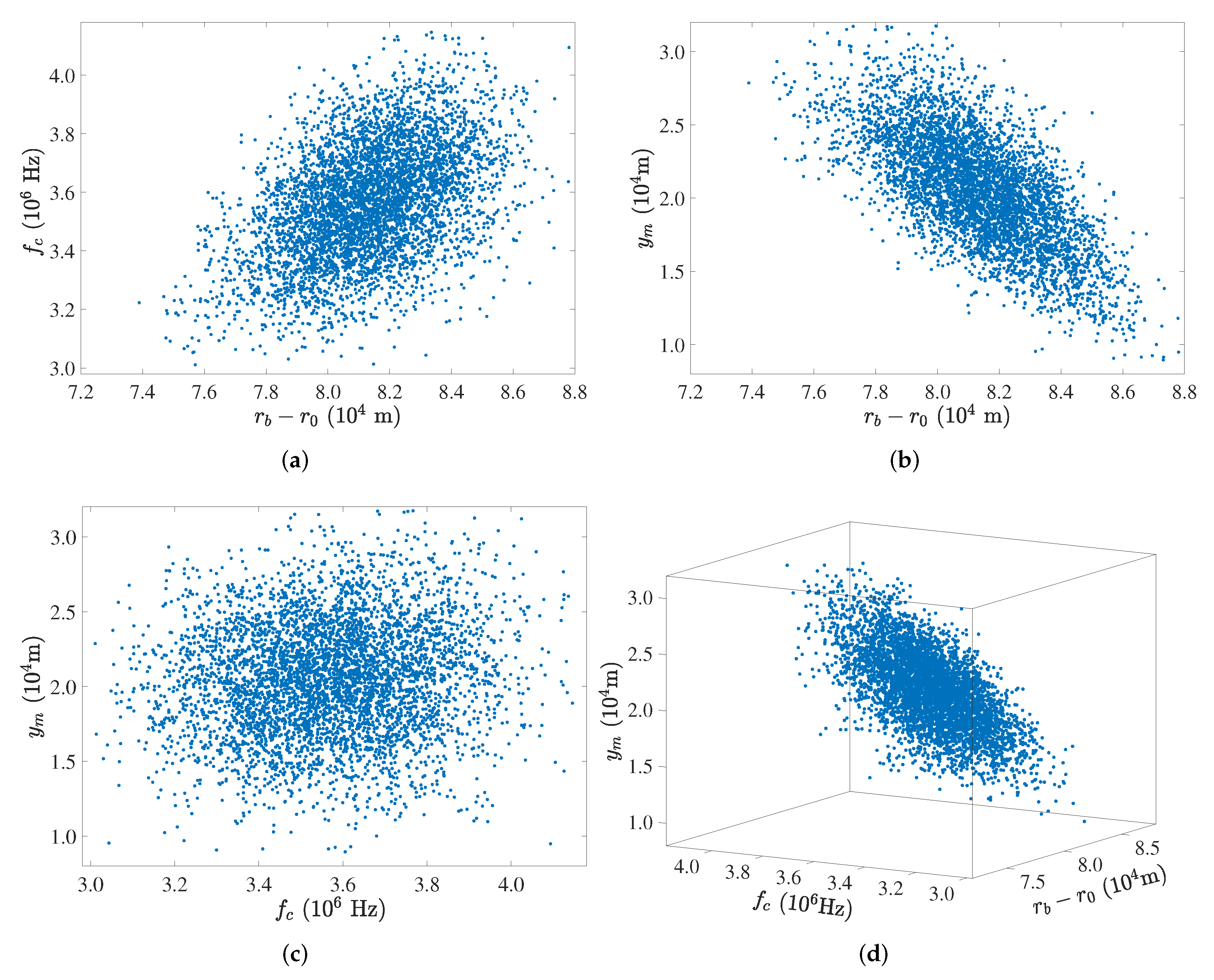
4.2. Convergence Evaluation of ESAI and Ionospheric Parameters Estimation
4.3. Analysis of OTHR CR Results
- Case 1: The ground ranges of targets are calculated using the a prior of the ionospheric parameters;
- Case 2: The ground ranges of targets are calculated using the true ionospheric parameters;
- Case 3: The ground ranges of targets are calculated using the estimation of ionospheric parameters with ADS-B data of different number of airliners (i.e., 4, 8, 12, 16, 20 airliners).
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fabrizio, G.A. High Frequency Over-the-Horizon Radar: Fundamental Principles, Signal Processing, and Practical Applications; McGraw Hill Education: New York, NY, USA, 2013. [Google Scholar]
- Ferraro, E.J.; Bucknam, J.N. Improved over-the-horizon radar accuracy for the counter drug mission using coordinate registration enhancements. In Proceedings of the 1997 IEEE National Radar Conference, Syracuse, NY, USA, 13–15 May 1997; pp. 132–137. [Google Scholar] [CrossRef]
- Pulford, G.W.; Evans, R.J. A multipath data association tracker for over-the-horizon radar. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 1165–1183. [Google Scholar] [CrossRef]
- Earl, G.F.; Ward, B.D. The frequency management system of the Jindalee over-the-horizon backscatter HF radar. Radio Sci. 1987, 22, 275–291. [Google Scholar] [CrossRef]
- Pulford, G.; Logothetis, A.; Evans, R. Integrated Multipath Track Initiation for Over-the-Horizon Radar: 3rd Report to Telecom Australia; Technical report; University of Melbourne: Parkville, Australia, 1995. [Google Scholar]
- Lan, H.; Ma, J.; Wang, Z.; Pan, Q.; Xu, X. A message passing approach for multiple maneuvering target tracking. Signal Process. 2020, 174, 107621. [Google Scholar] [CrossRef]
- Guo, Z.; Wang, Z.; Lan, H.; Pan, Q.; Lu, K. OTHR multitarget tracking with a GMRF model of ionospheric parameters. Signal Process. 2021, 182, 107940. [Google Scholar] [CrossRef]
- Percival, D.J.; White, K.A.B. Multihypothesis fusion of multipath over-the-horizon radar tracks. Signal Data Process. Small Targets 1998, 3373, 440–451. [Google Scholar] [CrossRef]
- Kong, M.; Wang, G.; Wang, Y. Coordinate registration algorithms for over-the-horizon radar. J. Syst. Eng. Electron. 2006, 17, 725–730. [Google Scholar] [CrossRef]
- Lan, H.; Liang, Y.; Wang, Z.; Yang, F.; Pan, Q. Distributed ECM Algorithm for OTHR Multipath Target Tracking with Unknown Ionospheric Heights. IEEE J. Sel. Top. Signal Process. 2018, 12, 61–75. [Google Scholar] [CrossRef]
- Sathyan, T.; Chin, T.J.; Arulampalam, S.; Suter, D. A multiple hypothesis tracker for multitarget tracking with multiple simultaneous measurements. IEEE J. Sel. Top. Signal Process. 2013, 7, 448–460. [Google Scholar] [CrossRef]
- Lan, H.; Liang, Y.; Pan, Q.; Yang, F.; Guan, C. An EM algorithm for multipath state estimation in OTHR target tracking. IEEE Trans. Signal Process. 2014, 62, 2814–2826. [Google Scholar] [CrossRef]
- Lan, H.; Sun, S.; Wang, Z.; Pan, Q.; Zhang, Z. Joint target detection and tracking in multipath environment: A variational Bayesian approach. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2136–2156. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Yang, B.; Wang, W.; Bi, Y. Multiple-detection multi-target tracking with labelled random finite sets and efficient implementations. IET Radar Sonar Navig. 2019, 13, 272–282. [Google Scholar] [CrossRef]
- Feng, X.; Liang, Y.; Zhou, L.; Jiao, L.; Wang, Z. Joint mode identification and localisation improvement of over-the-horizon radar with forward-based receivers. IET Radar Sonar Navig. 2014, 8, 490–500. [Google Scholar] [CrossRef]
- Pulford, G.W. OTHR multipath tracking with uncertain coordinate registration. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 38–56. [Google Scholar] [CrossRef]
- Geng, H.; Liang, Y.; Cheng, Y. Target state and Markovian jump ionospheric height bias estimation for OTHR tracking systems. IEEE Trans. Syst. Man, Cybern. Syst. 2018, 50, 2599–2611. [Google Scholar] [CrossRef]
- Jones, R.M.; Stephenson, J.J. A Versatile Three-Dimensional Ray Tracing Computer Program for Radio Waves in the Ionosphere; US Department of Commerce, Office of Telecommunications: Boulder, FL, USA, 1975; Volume 1.
- Anderson, R.H.; Krolik, J.L. Track association for over-the-horizon radar with a statistical ionospheric model. IEEE Trans. Signal Process. 2002, 50, 2632–2643. [Google Scholar] [CrossRef]
- Bourgeois, D.; Morisseau, C.; Flecheux, M. Quasi-parabolic ionosphere modeling to track with Over-the-horizon Radar. In Proceedings of the IEEE/SP 13th Workshop on Statistical Signal Processing, Bordeaux, France, 17–20 July 2005; pp. 962–965. [Google Scholar] [CrossRef]
- Bourgeois, D.; Morisseau, C.; Flecheux, M. Over-the-horizon radar target tracking using multi-quasi-parabolic ionospheric modelling. IEE Proc.-Radar Sonar Navig. 2006, 153, 409–416. [Google Scholar] [CrossRef]
- Romeo, K.; Bar-Shalom, Y.; Willett, P. Detecting low SNR tracks with OTHR using a refraction model. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 3070–3078. [Google Scholar] [CrossRef]
- Wheadon, N.S.; Whitehouse, J.C.; Milsom, J.D.; Herring, R.N. Ionospheric modelling and target coordinate registration for HF sky-wave radars. In Proceedings of the 1994 Sixth International Conference on HF Radio Systems and Techniques, York, UK, 4–7 July 1994; pp. 258–266. [Google Scholar] [CrossRef]
- Weijers, B.; Choi, D.S. OTH-B coordinate registration experiment using an HF beacon. In Proceedings of the Proceedings International Radar Conference, Alexandria, VA, USA, 8–11 May 1995; pp. 49–52. [Google Scholar] [CrossRef] [Green Version]
- Barnum, J.R.; Simpson, E.E. Over-the-horizon radar target registration improvement by terrain feature localization. Radio Sci. 1998, 33, 1077–1093. [Google Scholar] [CrossRef]
- Cuccoli, F.; Facheris, L.; Sermi, F. Coordinate registration method based on sea/land transitions identification for over-the-horizon sky-wave radar: Numerical model and basic performance requirements. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2974–2985. [Google Scholar] [CrossRef]
- Fabrizio, G.; Zadoyanchuk, A.; Francis, D.; Nguyen, V. Using emitters of opportunity to enhance track geo-registration in HF over-the-horizon radar. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Holdsworth, D.A. Skywave over-the-horizon radar track registration using earth surface and infrastructure backscatter. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 986–991. [Google Scholar] [CrossRef]
- Li, C.; Wang, Z.; Zhang, Z.; Lan, H.; Lu, K. Sea/Land clutter recognition for Over-the-horizon radar via deep CNN. In Proceedings of the 2019 International Conference on Control, Automation and Information Sciences (ICCAIS), Chengdu, China, 23–26 October 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Torrez, W.C.; Yssel, W.J. Associating microwave radar tracks with relocatable over-the-horizon radar (ROTHR) tracks using the advanced tactical workstation. In Proceedings of the Conference Record of Thirty-Second Asilomar Conference on Signals, Systems and Computers (Cat. No. 98CH36284), Pacific Grove, CA, USA, 1–4 November 1998; Volume 1, pp. 618–622. [Google Scholar] [CrossRef]
- Bilitza, D. Ionospheric models for radio propagation studies. In The Review of Radio Science 1999–2002; Stone, W.R., Ed.; IEEE Press: Piscataway, NJ, USA, 2002; pp. 625–680. [Google Scholar]
- Croft, T.A.; Hoogasian, H. Exact ray calculations in a quasi-parabolic ionosphere with no magnetic field. Radio Sci. 1968, 3, 69–74. [Google Scholar] [CrossRef]
- Feng, J.; Ni, B.; Lou, P.; Wei, N.; Yang, L.; Liu, W.; Zhao, Z.; Li, X. A new inversion algorithm for HF sky-wave backscatter ionograms. Adv. Sp. Res. 2018, 61, 2593–2608. [Google Scholar] [CrossRef]
- Yang, L.; Gao, H.; Ling, Y.; Li, B. Localization method of wide-area distribution multistatic sky-wave Over-the-Horizon radar. IEEE Geosci. Remote Sens. Lett. 2020, in press. [Google Scholar] [CrossRef]
- Ding, M.; Tong, P.; Wei, Y.; Yu, L. Multiple phase screen modeling of HF wave field scintillations caused by the irregularities in inhomogeneous media. Radio Sci. 2021, 56, e2020RS007239. [Google Scholar] [CrossRef]
- Langmuir, I. Oscillations in Ionized Gases. Proc. Natl. Acad. Sci. USA 1928, 14, 627–637. [Google Scholar] [CrossRef] [Green Version]
- Galkin, I.; Reinisch, B.; Huang, X.; Bilitza, D. Assimilation of GIRO data into a real-time IRI. Radio Sci. 2012, 47, 1–10. [Google Scholar] [CrossRef]
- Ippolito, A.; Altadill, D.; Scotto, C.; Blanch, E. Oblique ionograms automatic scaling algorithm OIASA application to the ionograms recorded by Ebro observatory ionosonde. J. Sp. Weather Sp. Clim. 2018, 8, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Lide, D.R. CRC Handbook of Chemistry and Physics, 97th ed.; CRC Press: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Coleman, C.J. Point-to-point ionospheric ray tracing by a direct variational method. Radio Sci. 2011, 46. [Google Scholar] [CrossRef]
- Azzarone, A.; Bianchi, C.; Pezzopane, M.; Pietrella, M.; Scotto, C.; Settimi, A. IONORT: A Windows software tool to calculate the HF ray tracing in the ionosphere. Comput. Geosci. 2012, 42, 57–63. [Google Scholar] [CrossRef] [Green Version]
- Stuart, A.M. Inverse problems: A Bayesian perspective. Acta Numer. 2010, 19, 451–559. [Google Scholar] [CrossRef] [Green Version]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006. [Google Scholar] [CrossRef]
- Andrieu, C.; De Freitas, N.; Doucet, A.; Jordan, M.I. An introduction to MCMC for machine learning. Mach. Learn. 2003, 50, 5–43. [Google Scholar] [CrossRef] [Green Version]
- Brooks, S.; Gelman, A.; Jones, G.; Meng, X.L. Handbook of Markov chain Monte Carlo; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar] [CrossRef]
- Raftery, A.E.; Lewis, S.M. Implementing MCMC. In Markov Chain Monte Carlo Pract; Gilks, W.R., Richardson, S., Spiegelhalter, D., Eds.; Chapman & Hall/CRC Interdisciplinary Statistics, Taylor & Francis: London, UK, 1995. [Google Scholar] [CrossRef]
- Link, W.A.; Eaton, M.J. On thinning of chains in MCMC. Methods Ecol. Evol. 2012, 3, 112–115. [Google Scholar] [CrossRef]
- Hogg, D.W.; Foreman-Mackey, D. Data analysis recipes: Using Markov chain Monte Carlo. Astrophys. J. Suppl. Ser. 2018, 236, 11. [Google Scholar] [CrossRef] [Green Version]
- Goodman, J.; Weare, J. Ensemble samplers with affine invariance. Commun. Appl. Math. Comput. Sci. 2010, 5, 65–80. [Google Scholar] [CrossRef]
- Foreman-Mackey, D.; Hogg, D.W.; Lang, D.; Goodman, J. emcee: The MCMC hammer. Publ. Astron. Soc. Pacific 2013, 125, 306–312. [Google Scholar] [CrossRef] [Green Version]
- Roy, V. Convergence diagnostics for Markov chain Monte Carlo. Annu. Rev. Stat. Appl. 2020, 7, 387–412. [Google Scholar] [CrossRef] [Green Version]
- Brooks, S.P.; Gelman, A. General methods for monitoring convergence of iterative simulations. J. Comput. Graph. Stat. 1998, 7, 434–455. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|
| 1172.4 | 1344.1 | 1249.5 | 1155.8 | 1126.9 | 1177.2 | 1212.3 | 1288.3 | 1281.8 | 1229.8 |
| −0.1084 | −0.1183 | 0.1678 | −0.1747 | −0.0925 | 0.1551 | 0.1798 | 0.1775 | −0.0920 | 0.1436 |
| 1177.1 | 1231.9 | 1096.0 | 1195.7 | 1006.2 | 1180.4 | 1310.3 | 1204.3 | 1234.8 | 1203.1 |
| 0.2032 | 0.1546 | 0.1692 | −0.1716 | 0.1855 | −0.1618 | −0.1432 | −0.1748 | −0.1782 | −0.1870 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 1070.4 | 1142.5 | 1363.2 | 1213.2 | 1086.4 | 1222.9 | 1089.2 | 1148.8 | 1150.5 | 1176.3 |
| −0.1014 | 0.1851 | −0.1232 | −0.1054 | 0.1878 | −0.1184 | 0.1924 | −0.1541 | 0.1327 | 0.1544 |
| 1292.1 | 1218.7 | 1158.2 | 1318.5 | 1361.5 | 1343.8 | 1011.5 | 1188.4 | 1321.3 | 1368.1 |
| −0.1906 | 0.1888 | 0.2132 | 0.1323 | −0.0935 | −0.1826 | 0.1702 | −0.1446 | −0.1587 | −0.1473 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|
| 1192.4 | 1361.8 | 1274.1 | 1174.5 | 1147.3 | 1200.7 | 1238.3 | 1312.1 | 1299.5 | 1253.5 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 1089.5 | 1167.8 | 1378.8 | 1230.8 | 1112.1 | 1241.6 | 1114.4 | 1166.8 | 1172.3 | 1199.3 |
| Statistic | ||||||
|---|---|---|---|---|---|---|
| Mean (km) | IR | Mean (kHz) | IR | Mean (km) | IR | |
| 4 airliners | 2.11 | 58.33% | 190.99 | 4.98% | 3.76 | 7.09% |
| 8 airliners | 1.93 | 61.98% | 189.02 | 5.96% | 3.71 | 8.17% |
| 12 airliners | 1.80 | 64.41% | 184.56 | 8.18% | 3.65 | 9.75% |
| 16 airliners | 1.75 | 65.46% | 184.01 | 8.45% | 3.63 | 10.30% |
| 20 airliners | 1.73 | 65.89% | 183.30 | 8.80% | 3.61 | 10.74% |
| Cases | 1 | 2 | 3(4) | 3(8) | 3(12) | 3(16) | 3(20) |
|---|---|---|---|---|---|---|---|
| RMSE mean(km) | 2.86 | 1.01 | 1.13 | 1.08 | 1.06 | 1.05 | 1.04 |
| Improvement ratio | - | - | 60.39% | 62.26% | 63.07% | 63.43% | 63.66% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Wang, Z.; Hao, Y.; Lan, H.; Pan, Q. An Improved Coordinate Registration for Over-the-Horizon Radar Using Reference Sources. Electronics 2021, 10, 3086. https://doi.org/10.3390/electronics10243086
Guo Z, Wang Z, Hao Y, Lan H, Pan Q. An Improved Coordinate Registration for Over-the-Horizon Radar Using Reference Sources. Electronics. 2021; 10(24):3086. https://doi.org/10.3390/electronics10243086
Chicago/Turabian StyleGuo, Zhen, Zengfu Wang, Yuhang Hao, Hua Lan, and Quan Pan. 2021. "An Improved Coordinate Registration for Over-the-Horizon Radar Using Reference Sources" Electronics 10, no. 24: 3086. https://doi.org/10.3390/electronics10243086
APA StyleGuo, Z., Wang, Z., Hao, Y., Lan, H., & Pan, Q. (2021). An Improved Coordinate Registration for Over-the-Horizon Radar Using Reference Sources. Electronics, 10(24), 3086. https://doi.org/10.3390/electronics10243086