
Occlusion-Aware Path Planning to Promote Infrared Positioning Accuracy for Autonomous Driving in a Warehouse




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Related Work
1.2. Contributions
1.3. Organization
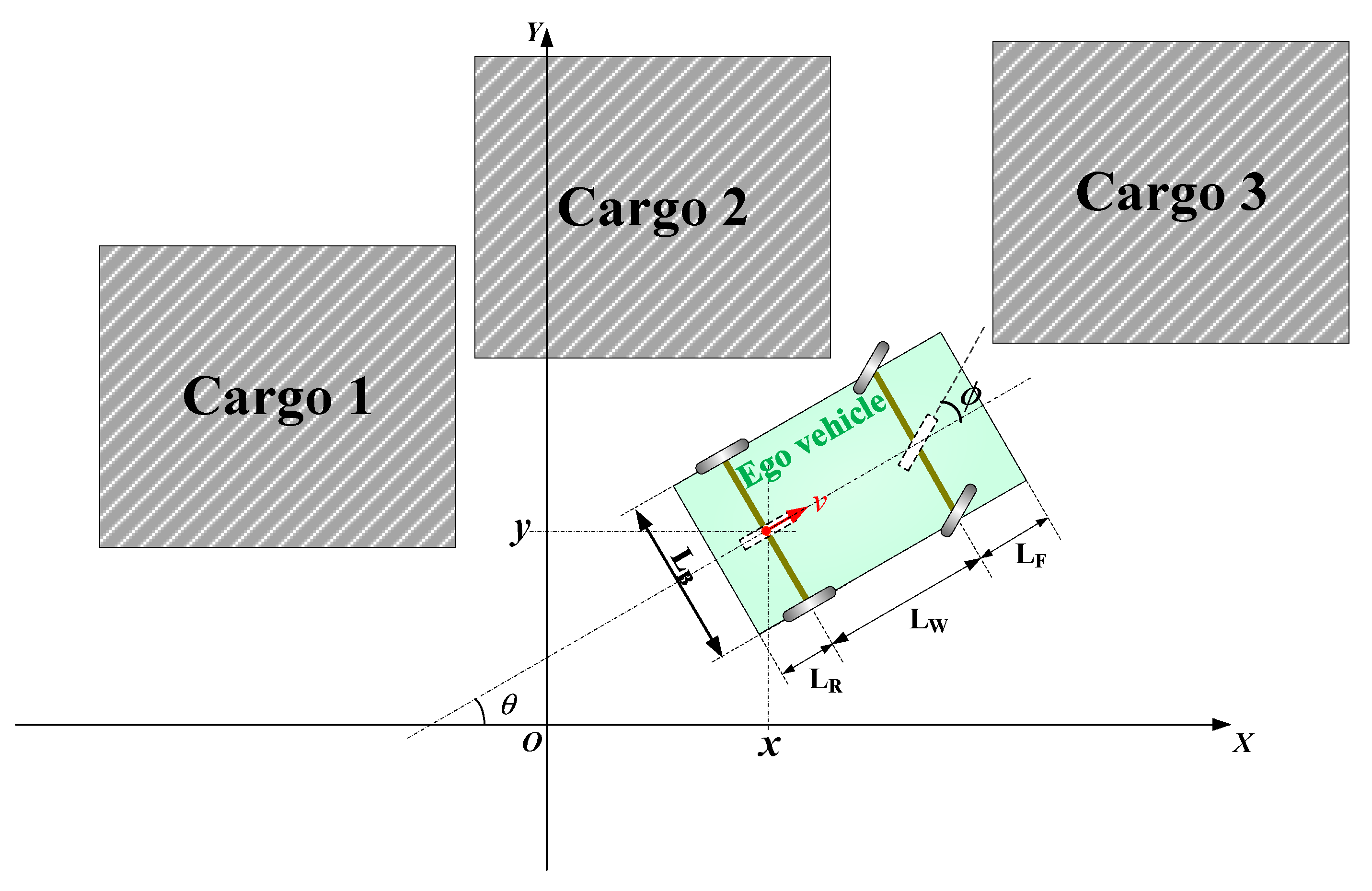
2. Problem Statement
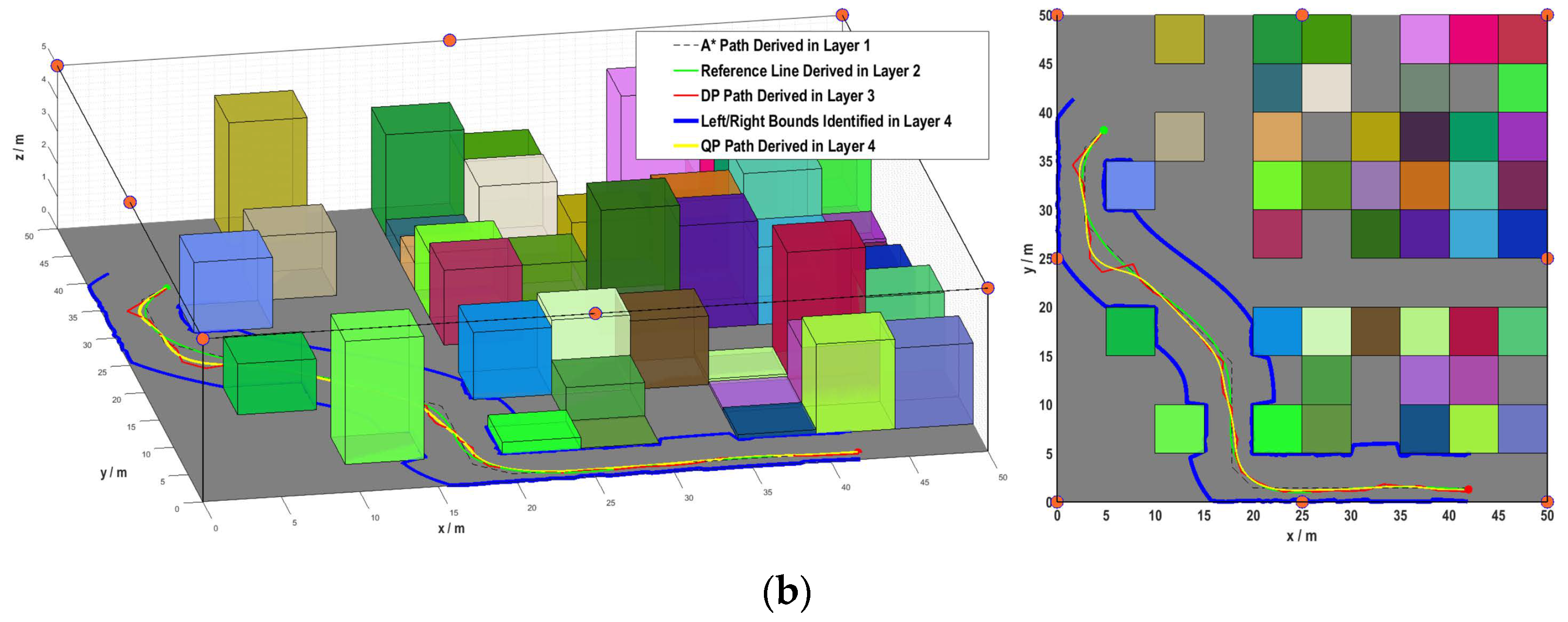
3. A Four-Layer Path Planning Method
3.1. Layer One: Search an A* Path
3.2. Layer Two: Generate a Reference Line
3.3. Layer Three: Search for a DP Path in the Frenet Frame
| Algorithm 1. Path planning via DP search. |
| Input: Reference line, scenario layout, location of cargoes; Output: A path ; 1. InitializeNodes(); 2. ; 3. For each , do 4. ; 5. ; 6. ; 7. End for 8. For each , do 9. For each , do 10. For each , do 11. ; 12. ; 13. If , then 14. ; 15. ; 16. End if 17. End for 18. End for 19. End for 20. ; 21. ; 22. Return. |
3.4. Layer Four: Optimize a Curvature-Continuous Path
4. Simulation Results and Discussion
4.1. Simulation Setup
4.2. On the Efficacy of the Proposed Planner
4.3. On the Occlusion Awareness of the Proposed Planner
4.4. On the Closed-Loop Tractability of the Proposed Planner
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jia, S.; Ma, L.; Yang, S.; Qin, D. Semantic and context-based image retrieval method using a single image sensor for visual indoor positioning. IEEE Sens. J. 2021, 21, 18020–18032. [Google Scholar] [CrossRef]
- Cengiz, K. Comprehensive analysis on least-squares lateration for indoor positioning systems. IEEE Internet Things J. 2021, 8, 2842–2856. [Google Scholar] [CrossRef]
- Lin, P.T.; Liao, C.; Liang, S. Probabilistic indoor positioning and navigation (PIPN) of autonomous ground vehicle (AGV) based on wireless measurements. IEEE Access 2021, 9, 25200–25207. [Google Scholar] [CrossRef]
- Seo, H.; Kim, H.; Kim, H.; Hong, D. Accurate positioning using beamforming. In Proceedings of the 2021 IEEE 18th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2021; pp. 1–4. [Google Scholar]
- Chavez-Burbano, P.; Guerra, V.; Rabadan, J.; Perez-Jimenez, R. Optical camera communication system for three-dimensional indoor localization. Optik 2019, 192, 162870. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, B.; Huang, F.; Chen, Y.; Zhang, S.; Cheng, Y. Corners positioning for binocular ultra-wide angle long-wave infrared camera calibration. Optik 2020, 206, 163441. [Google Scholar] [CrossRef]
- Aparicio-Esteve, E.; Hernández, Á.; Ureña, J. Design, calibration and evaluation of a long-range 3D infrared positioning system based on encoding techniques. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Yao, W.; Ma, L. Research and application of indoor positioning method based on fixed infrared beacon. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 5375–5379. [Google Scholar]
- Martínez-Barberá, H.; Herrero-Pérez, D. Autonomous navigation of an automated guided vehicle in industrial environments. Robot. Comput.-Integr. Manuf. 2010, 26, 296–311. [Google Scholar] [CrossRef]
- Khedkar, A.; Kajani, K.; Ipkal, P.; Banthia, S.; Jagdale, B.N.; Kulkarni, M. Automated Guided Vehicle System with Collision Avoidance and Navigation in Warehouse Environments. Sensors 2020, 7, 5442–5448. [Google Scholar]
- Li, B.; Li, L.; Acarman, T.; Shao, Z.; Yue, M. Optimization-based maneuver planning for a tractor-trailer vehicle in a curvy tunnel: A weak reliance on sampling and search. IEEE Robot. Autom. Lett. 2021. accepted. [Google Scholar] [CrossRef]
- Cao, H.; Zhao, S.; Song, X.; Li, M. Toward high automatic driving by a dynamic optimal trajectory planning method based on high-order polynomials. SAE Tech. Pap. 2020, 1, 1–10. [Google Scholar] [CrossRef]
- Li, X.; Sun, Z.; Cao, D.; He, Z.; Zhu, Q. Real-time trajectory planning for autonomous urban driving: Framework, algorithms, and verifications. IEEE/ASME Trans. Mechatron. 2016, 21, 740–753. [Google Scholar] [CrossRef]
- Cao, H.; Zhao, S.; Song, X.; Bao, S.; Li, M.; Huang, Z.; Hu, C. An optimal hierarchical framework of the trajectory following by convex optimisation for highly automated driving vehicles. Veh. Syst. Dyn. 2019, 57, 1287–1317. [Google Scholar] [CrossRef]
- Jian, Z.; Chen, S.; Zhang, S.; Chen, Y.; Zheng, N. Multi-model-based local path planning methodology for autonomous driving: An integrated framework. IEEE Trans. Intell. Transp. Syst. 2020. accepted. [Google Scholar] [CrossRef]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path planning for autonomous vehicles in unknown semi-structured environments. Int. J. Robot. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Li, X.; Sun, Z.; Cao, D.; Liu, D.; He, H. Development of a new integrated local trajectory planning and tracking control framework for autonomous ground vehicles. Mech. Syst. Signal Process. 2017, 87, 118–137. [Google Scholar] [CrossRef]
- Kuwata, Y.; Teo, J.; Fiore, G.; Karaman, S.; Frazzoli, E.; How, J.P. Real-time motion planning with applications to autonomous urban driving. IEEE Trans. Control Syst. Technol. 2009, 17, 1105–1118. [Google Scholar] [CrossRef]
- Wang, Y.; Li, S.; Cheng, W.; Cui, X.; Su, B. Toward efficient trajectory planning based on deterministic sampling and optimization. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 1318–1323. [Google Scholar]
- Fan, H.; Zhu, F.; Liu, C.; Zhang, L.; Zhuang, L.; Li, D.; Zhu, W.; Hu, J.; Li, H.; Kong, Q. Baidu Apollo EM motion planner. arXiv 2018, arXiv:1807.08048. [Google Scholar]
- Ajanovic, Z.; Lacevic, B.; Shyrokau, B.; Stolz, M.; Horn, M. Search-based optimal motion planning for automated driving. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4523–4530. [Google Scholar]
- Ma, L.; Xue, J.; Kawabata, K.; Zhu, J.; Ma, C.; Zheng, N. Efficient sampling-based motion planning for on-road autonomous driving. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1961–1976. [Google Scholar] [CrossRef]
- Li, B.; Kong, Q.; Zhang, Y.; Shao, Z.; Wang, Y.; Peng, X.; Yan, D. On-road trajectory planning with spatio-temporal RRT* and always-feasible quadratic program. In Proceedings of the 2020 16th IEEE International Conference on Automation Science and Engineering (CASE), Hongkong, China, 20–21 August 2020; pp. 943–948. [Google Scholar]
- Tian, F.; Zhou, R.; Li, Z.; Li, L.; Gao, Y.; Cao, D.; Chen, L. Trajectory planning for autonomous mining trucks considering terrain constraints. IEEE Trans. Intell. Veh. 2021, 6, 772–786. [Google Scholar] [CrossRef]
- Lim, W.; Lee, S.; Sunwoo, M.; Jo, K. Hierarchical trajectory planning of an autonomous car based on the integration of a sampling and an optimization method. IEEE Trans. Intell. Transp. Syst. 2018, 19, 613–626. [Google Scholar] [CrossRef]
- Chen, J.; Liu, C.; Tomizuka, M. FOAD: Fast optimization-based autonomous driving motion planner. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 4725–4732. [Google Scholar]
- Li, B.; Zhang, Y. Fast trajectory planning in Cartesian rather than Frenet frame: A precise solution for autonomous driving in complex urban scenarios. IFAC-PapersOnLine 2020, 53, 17065–17070. [Google Scholar] [CrossRef]
- Chen, J.; Zhan, W.; Tomizuka, M. Autonomous driving motion planning with constrained iterative LQR. IEEE Trans. Intell. Veh. 2019, 4, 244–254. [Google Scholar] [CrossRef]
- Luo, S.; Li, X.; Sun, Z. An optimization-based motion planning method for autonomous driving vehicle. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; pp. 739–744. [Google Scholar]
- Ziegler, J.; Bender, P.; Dang, T.; Stiller, C. Trajectory planning for Bertha—A local, continuous method. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium (IV), Dearborn, MI, USA, 8–11 June 2014; pp. 450–457. [Google Scholar]
- Eiras, F.; Hawasly, M.; Albrecht, S.; Ramamoorthy, S. A two-stage optimization-based motion planner for safe urban driving. IEEE Trans. Robot. 2021. accepted. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, H.; Waslander, S.; Gong, J.; Xiong, G.; Yang, T.; Liu, K. Hybrid trajectory planning for autonomous driving in highly constrained environments. IEEE Access 2018, 6, 32800–32819. [Google Scholar] [CrossRef]
- Lim, W.; Lee, S.; Sunwoo, M.; Jo, K. Hybrid trajectory planning for autonomous driving in on-road dynamic scenarios. IEEE Trans. Intell. Transp. Syst. 2021, 22, 341–355. [Google Scholar] [CrossRef]
- Hegedüs, F.; Bécsi, T.; Aradi, S.; Gáldi, G. Hybrid trajectory planning for autonomous vehicles using neural networks. In Proceedings of the 2018 IEEE 18th International Symposium on Computational Intelligence and Informatics (CINTI), Budapest, Hungary, 21–22 November 2018; pp. 25–30. [Google Scholar]
- Acerbo, F.; Auweraer, H.; Son, T. Safe and computational efficient imitation learning for autonomous vehicle driving. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 647–652. [Google Scholar]
- Marchesini, E.; Farinelli, A. Discrete deep reinforcement learning for mapless navigation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 10688–10694. [Google Scholar]
- Chen, L.; Hu, X.; Tang, B.; Cheng, Y. Conditional DQN-based motion planning with fuzzy logic for autonomous driving. IEEE Trans. Intell. Transp. Syst. 2020. accepted. [Google Scholar] [CrossRef]
- Jaritz, M.; Charette, R.; Toromanoff, M.; Perot, E.; Nashashibi, R. End-to-end race driving with deep reinforcement learning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 2070–2075. [Google Scholar]
- Li, B. Occlusion-aware on-road autonomous driving: A trajectory planning method considering occlusions of Lidars. Optik 2021, 243, 167347. [Google Scholar] [CrossRef]
- Li, B.; Acarman, T.; Zhang, Y.; Kong, Q. Occlusion-aware on-road autonomous driving: A path planning method in combination with honking decision making. In Proceedings of the 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 7403–7408. [Google Scholar]
- Manzinger, S.; Pek, C.; Althoff, M. Using reachable sets for trajectory planning of automated vehicles. IEEE Trans. Intell. Veh. 2021, 6, 232–248. [Google Scholar] [CrossRef]
- Chen, J.; Li, S.; Tomizuka, M. Interpretable end-to-end urban autonomous driving with latent deep reinforcement learning. IEEE Trans. Intell. Transp. Syst. 2020. accepted. [Google Scholar] [CrossRef]
- Werling, M.; Ziegler, J.; Kammel, S.; Thrun, S. Optimal trajectory generation for dynamic street scenarios in a Frenet frame. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 987–993. [Google Scholar]
- Li, B.; Ouyang, Y.; Li, L.; Zhang, Y. Autonomous driving on curvy roads without reliance on Frenet frame: A cartesian-based trajectory planning method. IEEE Trans. Intell. Transp. Syst. 2021. under review. [Google Scholar]
- Li, B.; Acarman, T.; Zhang, Y.; Ouyang, Y.; Yaman, C.; Kong, Q.; Zhong, X.; Peng, X. Optimization-based trajectory planning for autonomous parking with irregularly placed obstacles: A lightweight iterative framework. IEEE Trans. Intell. Transp. Syst. 2021. accepted. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Li, B.; Shao, Z. A unified motion planning method for parking an autonomous vehicle in the presence of irregularly placed obstacles. Knowl.-Based Syst. 2015, 86, 11–20. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Shao, Z. Simultaneous dynamic optimization: A trajectory planning method for nonholonomic car-like robots. Adv. Eng. Softw. 2015, 87, 30–42. [Google Scholar] [CrossRef]
- Wächter, A.; Biegler, L.T. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 2006, 106, 25–57. [Google Scholar] [CrossRef]
- Xu, W.; Pan, J.; Wei, J.; Dolan, J.M. Motion planning under uncertainty for on-road autonomous driving. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2507–2512. [Google Scholar]
- Stellato, B.; Banjac, G.; Goulart, P.; Bemporad, A.; Boyd, S. OSQP: An operator splitting solver for quadratic programs. Math. Program. Comput. 2020, 12, 637–672. [Google Scholar] [CrossRef] [Green Version]
- Ferreau, H.J.; Kirches, C.; Potschka, A.; Bock, H.G.; Diehl, M. qpOASES: A parametric active-set algorithm for quadratic programming. Math. Program. Comput. 2014, 6, 327–363. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Tang, S.; Zhang, Y.; Zhong, X. Occlusion-Aware Path Planning to Promote Infrared Positioning Accuracy for Autonomous Driving in a Warehouse. Electronics 2021, 10, 3093. https://doi.org/10.3390/electronics10243093
Li B, Tang S, Zhang Y, Zhong X. Occlusion-Aware Path Planning to Promote Infrared Positioning Accuracy for Autonomous Driving in a Warehouse. Electronics. 2021; 10(24):3093. https://doi.org/10.3390/electronics10243093
Chicago/Turabian StyleLi, Bai, Shiqi Tang, Youmin Zhang, and Xiang Zhong. 2021. "Occlusion-Aware Path Planning to Promote Infrared Positioning Accuracy for Autonomous Driving in a Warehouse" Electronics 10, no. 24: 3093. https://doi.org/10.3390/electronics10243093
APA StyleLi, B., Tang, S., Zhang, Y., & Zhong, X. (2021). Occlusion-Aware Path Planning to Promote Infrared Positioning Accuracy for Autonomous Driving in a Warehouse. Electronics, 10(24), 3093. https://doi.org/10.3390/electronics10243093