Abstract
In the case of level 3 automated vehicles, in order to safely and quickly transfer control authority rights to manual driving, it is necessary that a study be conducted on the characteristics of human factors affecting the transition of manual driving. In this study, we conducted three experiments to compare the characteristics of human factors that influence the driver’s quality of response when re-engaging and stabilizing manual driving. The three experiments were conducted sequentially by dividing them into a normal driving situation, an obstacle occurrence situation in front, and an obstacle and congestion on surrounding roads. We performed a statistical analysis and classification and regression tree (CART) analysis using experimental data. We found that as the number of trials increased, there was a learning effect that shortened re-engagement times and increased the proportion of drivers with good response times. We found that the stabilization time increased as the experiment progressed, as obstacles appeared in front and traffic density increased in the surrounding lanes. The results of the analysis are useful for vehicle developers designing safer human–machine interfaces and for governments developing guidelines for automated driving systems.
1. Introduction
To prepare for the era of automated vehicles, countries across the world are dedicating considerable efforts to studying various fields (for example, core components, semiconductors, software, cartography, vehicles, etc.) and striving to resolve numerous issues to ensure driving safety [1,2,3,4,5]. Many people expect automated vehicles to reduce the number of accidents caused by human error. A higher level of automation (three or more) reduces the burden of driving on the driver. It can improve drivers’ productivity and provide them with leisure time in the vehicle; in addition, it can reduce traffic accidents caused by manual driving and improve traffic flow efficiency. Automated vehicles offer the advantage of comfortable mobility in terms of sustainable mobility for the elderly and the disabled [6].
According to society of automotive engineers (SAE) J3016, there are six levels of automated driving [7]. Level 0 offers no driving automation, and level 1 offers driver assistance. Level 2 offers partial driving automation, and level 3 offers conditional driving automation. Level 4 offers high driving automation, and level 5 offers full driving automation.
At level 3, an automated driving system (ADS) can handle dynamic driving tasks. It can maintain lanes, headway distance, and vehicle speed on the road; therefore, ADS can cope with situations such as sudden braking of a car in front of the vehicle. However, the driver must be able to regain control when the ADS cannot perform driving. As shown in Figure 1, for the driver to arrive at the destination, the three stages of automated driving, control authority transition, and manual driving are repeated. The transition from manual to automated driving can be realized in a stable manner. In the opposite case, the transition may be delayed or unstable depending on non-driving-related tasks (NDRTs) and the ability of the driver. NDRTs are secondary tasks such as eating, texting on smartphone, and video watching, which can be done by drivers of automated vehicles. The automated system must be able to notify the driver in advance to ensure that he or she has enough time to respond to the situation. When the ADS sends a take-over request (TOR) before the automated stage ends, the driver recognizes the TOR and confirms it in the transition period. After the confirmation, the driver uses the steering wheel and drives the car manually. The driver can perform various NDRTs during the automated driving stage, but he or she must be ready to regain control of the vehicle when a TOR occurs at any time [8]. Driver readiness (DR) is defined as the state of the driver during automated driving that influences his or her intervention ability to regain control of the vehicle from the ADS [9].
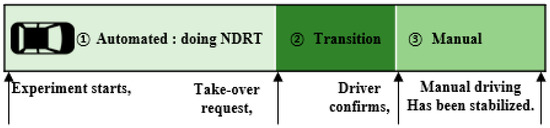
Figure 1.
Concept of control authority transition from automated driving system (ADS) to driver [10].
It is necessary to study the human factors that determine the characteristics of the transition between automated and manual modes of driving for safe control authority transitions. These factors include the driver’s inattention and distraction, situational awareness, over-reliance on ADS, and driving skill degradation [11]. These human factors can affect TOR performance, which can be divided into time-related and quality-related performances [9].
The study [12] shows that TOR performance, such as take-over time and quality, depends on the position of the other vehicle (in front of the vehicle, in the left or right lane) and traffic density. Participants perform a cognitive two-back task or visual surrogate reference task as the NDRT prior to the take-over process. A higher criticality of driver behavior was observed in situations involving high traffic density, such as obstacles in the middle lane and blocked right/left lane. Research [13] shows a distinctly negative influence of traffic density (0, 10, 20 vehicles per kilometer) on take-over performance, as higher traffic density and a greater number of objects lead to delays in initiating the maneuver. This result may be caused by extended visual scanning and the decision-making process.
In [14], older drivers (over 60 years) reacted as fast as younger drivers (under 28 years) in situations with no, medium, or high traffic density. However, older drivers differed in their modus operandi as they braked more often and strongly and maintained a higher time-to-collision. In [15,16], drivers occupied with a secondary task exhibited larger variance and slower responses to requests to resume control. The results show that reflective reaction times depend on secondary tasks and thus need to consider a different type of TORs based on the status of the driver. The study [10] shows that providing situation awareness (SA) information (remaining time and distance to TOR) during automated driving improves the transition performance of the driver. In [17], the reaction time for the driver to place his or her hands back on the steering wheel was lower when visual–auditory TORs were used in comparison with purely visual ones. In [18], the driver obtained faster TOR perception when haptic channels were used in addition to auditory and visual channels. For the commercialization of level 3 automated vehicles, in addition to the various studies discussed above, more studies are needed to determine how much time is required to quickly transfer control to manual driving and to stably operate manual driving, and which factors affect them. Therefore, in this study, the following topics are determined, and experiments are conducted to compare the characteristics of human factors that affect the quality when the driver re-engages in manual driving and present the results.
Research Question 1. How much time does the driver need to re-engage in manual driving? How do the characteristics of the driver’s human factor affect the re-engagement performance of manual driving?
Research Question 2. How much time is required for manual driving to stabilize? What factors affect the time it takes for manual driving to stabilize?
2. Methods
2.1. Experiment Environment
We conducted experiments using a fixed-based vehicle simulator built based on a Hyundai Click with fully operational driver controls (Figure 2). The temperature and humidity in the laboratory were constant. We used three 43-inch monitors for viewing the front road, left side, and right side to obtain a 135° horizontal field of view (FOV). Further, the wing and the rear-view mirrors were also equipped for the rear road scene with horizontal and vertical FOVs of 20° and 25°, respectively. The roadway was an eight-lane, two-way highway environment with four lanes each way. The test vehicle was located in the third of the four lanes, and we maintained a traffic density of about 20 vehicles in a 1 km section, including vehicles in front, in the left lane (second lane), and in the right lane (fourth lane). Vehicle and environment information were collected from the simulator, and driver information was obtained from questionnaires covering each operator’s observations. The vehicle simulator was linked to a data acquisition (DAQ) server [10,15,18].
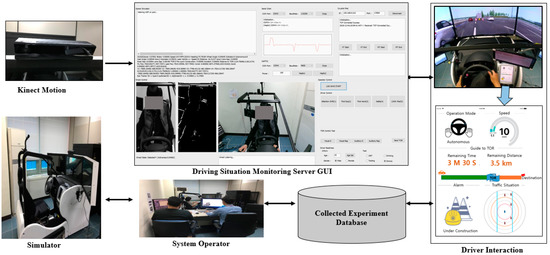
Figure 2.
Experiment device and environment [10,15,18].
2.2. Participants and Acquisition Data
We recruited 90 participants with at least 1 year of licensed driving experience; the recruitment was conducted via social networking sites and over the Internet. Of the 90 subjects, half are between 20 s and 30 s; the other half are between 40 s and 50 s. The ratio of male to female drivers in each age group was the same (45 males and 45 females). After the experiment was performed, the participants received $27 for their participation. Each participant completed a national aeronautics and space administration task load index (NASA-TLX), rating scale mental effort (RSME), and visual analog scale (VAS) questionnaires at the end of each experiment. Driver, vehicle, and environment data were collected from the simulator and additional sensors. A Kinect sensor was used to store information on each driver’s behavior. The time for all collected information except for the questionnaire was synchronized to the simulator time. This study was conducted with the approval of the Public Institutional Bioethics Committee of the Republic of The Republic of Korea (http://public.irb.or.kr/, approval number P01-202009-13-001).
2.3. Experiment Procedure
The participants were briefed on how to operate the simulator before the experiment. Before starting the practice driving, the operator guided the participants: “If you manually manipulate the steering wheel, brake, or accelerator during automated driving, it will change to manual driving.” After about 3 min of self-driving, when a voice command such as “Please drive manually” would be announced, the participant must start manual driving. When changing to manual operation, an auditory notification was made, and the driving mode information was displayed as “manual operation” on the display screen mounted on the right terminal. The participants engaged in practice driving and participated in three kinds of experiments.
Figure 3 shows the detailed experiment procedure. The participants completed a simulator practice drive, followed by three experiments and the questionnaire. In each experiment, the driver used a smartphone to retrieve or read information during autonomous driving. At the end of 3 min of autonomous driving, the driver started manual driving, allowing him or her to continue manual driving for about 2 min and 30 s. The experiment was conducted by dividing it into a normal driving situation, an obstacle occurrence situation in front, and an obstacle and congested roadway near the vehicle. When the driver started driving manually and got used to driving, the participant would say “Stable.” The difference was analyzed by measuring the time it took to transfer to manual driving in each situation and the stabilization time of the driver after starting the manual driving.
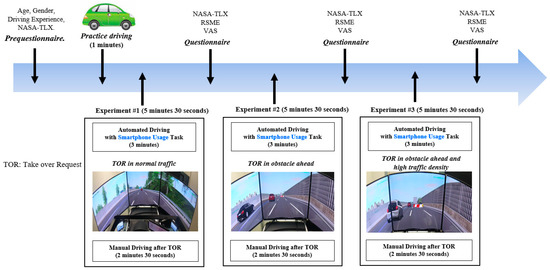
Figure 3.
Experiment procedure.
2.4. Data Preprocessing
There are three types of time information measured through this experiment: first, when the driver recognizes the TOR and responds reflexively (eye_ontime); second, when transitioning from automated to manual driving by using one hand to hold the steering wheel (hand_ontime); third, when the driver has established stability after manual driving (settletime). To determine the time that it takes for the driver to recognize the TOR and transition to manual driving, we performed preprocessing and collected four-time values (that is, T1, T2, T3, and Time Budget), as shown in Figure 4. We define T1 as the point of perception and reflexive behavior. When the TOR occurs, as the driver performs NDRT during automated driving, some drivers listen to the TOR and raise their eyes-on first. The driver puts a hand on the steering wheel and regains control from the ADS for manual operation. T2 represents the mental processing time duration between TOR recognition and manual driving. When the participant gets used to driving and stabilizes, the driver says “Stable.” T3 represents the time taken for manual driving to be stabilized. Time Budget represents the total time elapsed from the generation of the TOR to the stabilization of manual driving [16]. We calculated the averages for T1, T2, T3, and Time Budget for all the participants who performed the experiments. Although 90 people participated in the experiment, outlier data occurred. For example, there was an unexpected delay in the simulator operation due to inexperience with operation of the vehicle simulator, some participants failed to state that the manual drive was stabilized after they started manual driving, and the experimental operator made some mistakes by not entering the T3 observation time. We removed the outliers for T1, T2, and T3. The number of participants with all T1, T2, and T3 data was reduced from 90 to 84. We used data from the 84 suitable for analysis. The age group consisted of 43 younger people in their 20 s to 30 s, 41 middle-aged people in their 40 s to 50 s, and 42 males and 42 females.
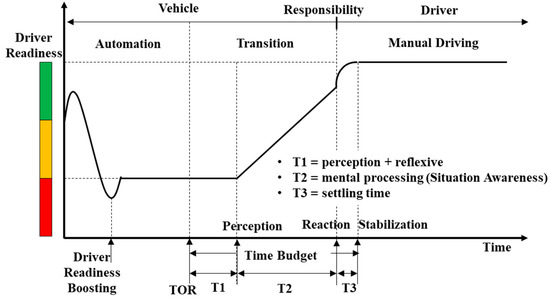
Figure 4.
Concept of take-over transition time [16].
2.5. Classification and Regression Tree Method
We used classification and regression tree (CART) modeling to explain the characteristics of the features that affect the TOR response time and stabilization time. CART is a decision tree algorithm proposed by Leo Breiman, Jerome Friedman, Richard Olshen, and Charles Stone in 1984 [19]. CART uses a classification tree when the target variable is categorical, and it identifies the “class” to which the target variable belongs; it uses a regression tree when the target variable is continuous, and the tree is used to predict the value. The CART method can determine the complex interactions among variables in the final tree [20]. The CART decision tree represents a binary recursive splitting procedure that can handle continuous and nominal attributes with targets and predictors. CART uses the Gini index when splitting data. The Gini index measures the impurity of D, a data partition or set of training tuples, as (1)
where pi is the probability that a tuple in D belongs to class Ci. The sum is computed over m classes. The Gini index considers a binary split for each attribute [21]. Typically, the confusion matrix is used to represent the performance of a classification, such as that presented in Table 1, by representing the two classes as positive and negative. True positive (TP) represents the number of data samples predicted to be positive when belonging to the positive class. False positive (FP) represents the number of data samples predicted to be positive when belonging to the negative class. True negative (TN) and false negative (FN) are defined similarly.

Table 1.
Confusion matrix.
Accuracy is calculated by dividing the number of correct predictions (TP + TN) by the total number of predictions (TP + FN + FP + TN) as in Equation (2). The true positive rate (TPR) is a basic evaluation measure that is defined as the ratio of the correctly predicted true to the actual true instances as shown in Equation (3). TPR is also known as sensitivity or recall. A classifier with a high TPR (sensitivity) has a high chance of correctly identifying the positive instances of the data. The true negative rate (TNR) is defined as the ratio of the correctly predicted false to the actual false instances as shown in Equation (4). TNR is also known as specificity. A high TNR value implies that the classifier correctly classifies any randomly chosen negative instance in the data set. Sensitivity and specificity are measures used in binary classification applications where the successful detection of one of the classes is considered more significant than the detection of the other classes. We used accuracy, sensitivity, and specification to evaluate the performance of the classification model.
3. Results
3.1. Statistical Analysis Results for Take-Over Transition Time
The three experiments were conducted sequentially by dividing them into a normal driving situation, an obstacle occurrence situation in front, and an obstacle and congested roadway near the vehicle.
Table 2 shows the results of the statistical analysis on the T1T2 re-engagement time and T3 stabilization time measured in three experiments. When the T1T2 average was calculated after combining the three experimental results, the average was 4.25 s. Analyzing the results of each experiment, the re-engagement time of experiment 3 was fastest with an average of 3.1 s, and experiment 2 was 4.29 s and experiment 1 was 4.74 s. There were significant differences in the results of ANOVA (analysis of variance) for T1T2 of the three experiments (F-value = 13.2, p = 0.00). As the experiment progressed, we could see that the driver’s response speed became faster.
Table 2.
Statistical analysis results for transition time.
When the T3 average was calculated after combining the three experimental results, the average was 20.92 s. Analyzing the results of each experiment, the T3 stabilization time of experiment 1 was fastest with an average of 11.54 s, and experiment 2 was 22.65 s and experiment 3 was 28.55 s. The results of ANOVA for T3 of the three experiments showed a significant difference (F = 47.3, p = 0.00). Unlike the T1T2 re-engagement time, the T3 stabilization time increased as the experiment progressed. That is because the three types of experiments provided different conditions of the road ahead and the condition of traffic after switching control rights. Through the three experiments, we can confirm that the T3 stabilization time is affected when there is an accident in the road ahead or when the traffic density of the surrounding roadway is high.
3.2. Classification Result for Re-Engagement Time
In order to safely use a level 3 automated vehicle, research is needed to see whether the driver can start manual driving within a limited time. Studies are ongoing on appropriate thresholds for a TOR’s response time and may vary from country to country. For example, a TOR’s response time threshold was suggested to be 4 s in [22]. To verify whether the threshold time is adequate, it is necessary to determine the percentage of drivers who regained control authority within the threshold. In addition, research is needed to find out what driver characteristics take a long time to regain control.
In Figure 4, we define the time to recognize a TOR and react reflexively as T1, and the time to put the hand on the steering wheel as T2. The time to recognize the TOR and start manual operation is the time to add T1 and T2. In this paper, we denote this as T1T2. We used the average value of T1T2 measured in the experiment as a threshold value to classify the TOR reaction time into a group with a slow response time and a good group, and performed a CART analysis to find out how the driver’s human factor characteristics affect it. The results of the analysis can be used to train and guide the driver in transferring to manual driving stably. Referring to Table 2, each experimenter performed three experiments; 252 T1T2 re-engagement times were obtained. They were divided into two groups based on the average re-engagement time of 4.25 s in Table 2.
Table 3 represents a classification table for the results of CART analysis using the driver characteristics. Evaluating the performance of the CART analysis for T1T2, the accuracy was 64.3%, the sensitivity for predicting a good grade was 0.7639, and the specificity for a slow grade was 0.4815.
Table 3.
Classification table in classification and regression tree (CART) analysis for T1T2 Re-engagement Time.
Figure 5 shows the decision tree obtained by performing CART analysis. We can determine the driver characteristics from a good and slow TOR response time group through the decision tree configuration. The good class consists of 144 cases (57.1%), and the slow class consists of 108 cases (42.9%). The characteristics of branched nodes in CART analysis are as follows:
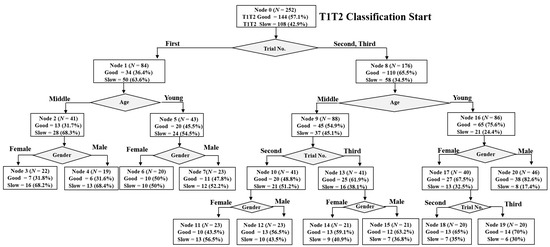
Figure 5.
CART (classification and regression tree) decision tree for T1T2.
- Nodes 1 and 8: In experiments 2 and 3, compared with experiment 1, the percentage of drivers with good class re-engagement time for manual driving increased by 29.1% from 36.4% to 65.5%. This indicates that the proportion of participants with good response times increases, and there is a learning effect from the experiment. Therefore, it has been observed that the learning effect reduces response time, which means that level 3 autonomous drivers need education and training.
- Nodes 2–7: Among the participants in experiment 1, middle-aged drivers showed a 13.8% lower good class ratio than young-aged drivers. You can see that the reaction time varies according to age. There was no significant difference in the good class ratio between female drivers and male drivers in experiment 1.
- Nodes 9 and 16: Among the participants in experiment 2, middle-aged drivers showed a 20.7% lower good class ratio than young-aged drivers, showing that the reaction time varies with age.
- Nodes 10–15: For middle-aged drivers, the good class ratio increased by 13.1% in experiment 3 compared with experiment 2. Since the experiment was repeated, the time to start manual operation became faster. In experiment 2, female drivers had a 13% lower good class ratio than male drivers, but in experiment 3, it was 4.1% lower. It can be seen that with repeated experiments, middle-aged female drivers also engaged in manual driving more rapidly, which means that level 3 autonomous drivers benefit from education and training.
- Nodes 17–20: Young-aged female drivers had a 15.1% lower good class ratio than male drivers. Likewise, the good class rate in experiment 3 increased by 5% compared with experiment 2, so the more times the experiment was repeated, the faster was the reaction time to start manual operation.
Analysis of the results indicated that the driver’s age and the number of repetitions of the experiment were factors that significantly affected the re-engagement time of manual driving, and that there was a slight difference according to gender.
3.3. Classification Results for Stabilization Time
In a level 3 automated vehicle, it is important to quickly regain control and allow the driver to stably drive manually. Therefore, the ADS must be able to process the TOR considering the time until the driver stabilizes the operation after manual transition. In our experiment, we instructed the driver to say “Stable” when the manual drive became stable, and used this to measure the T3 stabilization time.
Referring to Table 2, each experimenter performed three experiments; 252 T3 stabilization times were obtained. They were divided into two groups based on the average re-engagement time of 20.92 s in Table 2. Table 4 represents a classification table for the results of CART analysis using the driver characteristics. Evaluating the performance of the CART analysis for T3, the accuracy was 73.2%, the sensitivity for predicting a good grade was 0.7349, and the specificity for a slow grade was 0.7209.
Table 4.
Classification table in CART analysis for T3 stabilization time.
Figure 6 shows the decision tree obtained by performing CART analysis. We can identify the driver characteristics from a good and slow stabilization time group through the decision tree configuration. The good class consists of 166 cases (65.9%), and the slow class consists of 86 cases (34.1%). The characteristics of branched nodes in CART analysis are as follows:
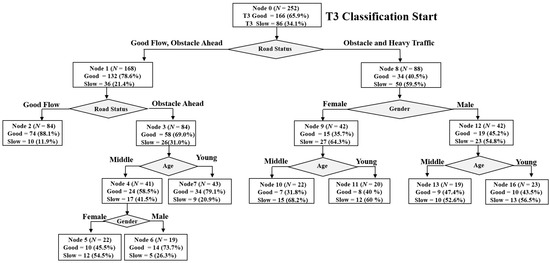
Figure 6.
CART decision tree for T3.
- Nodes 1 and 8: For the stabilization time class of manual operation, nodes were branched according to the status of the road ahead and traffic conditions in the surrounding lanes. If there is an obstacle or vehicle in front of you due to an accident, you must avoid it and change lanes. The good class ratio in node 1 was 78.6% and the good class ratio in node 8 was 40.5%. Therefore, the good class ratio in the case of heavy traffic from obstacles and in surrounding lanes was 40.5%, which was 38.1% lower than that of 78.6% which was not.
- Nodes 2 and 3: After transition to manual driving, it can be seen that 88.1% of the driver’s stabilization time was seen quickly when the road in front had a good flow. However, when there was an obstacle in front, it can be seen that a situation in which lane change was required occurred, and the class with good stabilization time was reduced to 69%. Through this, it can be judged that the control authority transition should be planned in consideration of the state of inactivity of the surrounding roads.
- Nodes 4–7: Middle-aged drivers have a 20.6% lower percentage of good class compared with young drivers among the participants, indicating that the stabilization time varies with age. In particular, middle-aged female drivers showed a 28.2% greater difference in good class percentage than male drivers. Therefore, the stabilization time may vary depending on the age and gender characteristics, so it is important to be able to take these human factor characteristics into account in the control transition notification.
- Nodes 9–16: When there was an obstacle in front of the driver after regaining control and the traffic density of the surrounding road was high, a large proportion of classes experienced a slow stabilization time. We found that female drivers need more stabilization time than male drivers, and middle-aged female drivers in particular need more stabilization time.
As a result of the analysis, we found that the safety of manual driving is greatly influenced by the characteristics of road conditions and a driver’s human factors. Based on these results, it is necessary to plan a request for level 3 control transfer in consideration of road environment information, such as road conditions ahead and surrounding traffic conditions.
3.4. Statistical Analysis Results for Workload, Fatigue, and Effort
In experiment 1, the driver transferred from automated to manual driving and performed manual driving for about 2 min and 30 s while following the vehicle in front. There were no obstacles, and the traffic flow was light, so the driver was able to drive easily. In experiment 2, after regaining control, the driver must change lanes to avoid an obstacle 100 m ahead. Additionally, he or she performed manual driving for about 2 min and 30 s. There was a process for avoiding obstacles. In experiment 3, after control was transferred from automated driving to manual driving, and there was an obstacle in front, lane change was necessary, but it was difficult to change lanes because there were many vehicles in the surrounding lanes. Manual driving was performed for 2 min and 30 s. We conducted a survey to understand how the driver’s workload, effort, and fatigue vary from experiment to experiment.
Table 5 shows the ANOVA results for workload, fatigue, and effort. Each participant completed a questionnaire about workload, effort, and fatigue at the end of each experiment. We used NASA-TLX data to determine “How much work did you feel during the experiment,” and used RSME data to determine “How much effort did you put into conducting the experiment,” and used the VAS questionnaire to determine “How tired are you from participating in the experiment.” As the experiment progressed, the driver’s workload, effort, and fatigue increased significantly, as shown in Table 4. In experiment 3, the workload felt by the driver increased by 36.8% compared with experiment 1, the effort increased by 21.6%, and fatigue increased by 41.6%. This is because manual driving became difficult due to increased obstacles and traffic density after regaining control as the experiment progressed. Accordingly, as the experiment progressed, the re-engagement time shortened, but the stabilization time increased. Therefore, the transfer of control of a level 3 automated vehicle can be safe only if it can provide a planned transition of control that takes into account road conditions and environments. In addition, the re-engagement time for manual driving of level 3 vehicles can be shortened through training, so education on gaining safe control is necessary.
Table 5.
Analysis of variance (ANOVA) results for workload, fatigue, and effort.
4. Conclusions
For level 3 automated driving, the driver must be able to recontrol the vehicle at any time in the event of a TOR. In a level 3 automated vehicle, it is important to transfer control authority between automated driving and manual driving [7]. When control is transferred from ADS to manual operation, response may be delayed depending on the driver’s NDRT and driving capability. This study uses the results of three experiments to compare the characteristics of human factors that influence the quality of a driver’s response when re-engaging manual driving.
The re-engagement time of experiment 3 was fastest with an average of 3.1 s, and experiment 2 was 4.29 s and experiment 1 was 4.74 s. We found that as the number of trials increased, there was a learning effect that shortened re-engagement times and increased the proportion of drivers with good response times. As a result of CART analysis, the driver’s age and the number of repetitions of the experiment were found to be factors that significantly affected the re-engagement time of manual driving, and there was a slight difference according to gender. Therefore, for middle-aged or older drivers, a driver education and training system using automated vehicles may be required.
We analyzed how the stabilization time of manual driving varied as the experiment progressed, as obstacles appeared in front and traffic in the surrounding lanes increased. The stabilization time of experiment 1 was fastest with an average of 11.54 s, and experiment 2 was 22.65 s and experiment 3 was 28.55 s. Unlike the re-engagement time, we found that the stabilization time was longer when an accident occurred on the road ahead or when traffic density was high on the surrounding lanes. In addition, as a result of CART analysis, we found that the safety of manual driving was greatly influenced not only by the characteristics of the road situation but also by the driver’s age and gender factors. Based on these results, it is necessary to plan a request for level 3 control transfer in consideration of road environment information, such as road conditions ahead and surrounding traffic conditions.
In the future, vehicle-to-everything (V2X) communications supported by sixth-generation (6G) wireless systems will be an important element of connected autonomous vehicles. A wide range of wireless technologies, such as vehicle-to-vehicle (V2V) communication, vehicle-to-infrastructure (V2I) communication, vehicle-to-pedestrian (V2P), and so forth, will be in service [23,24]. Therefore, it is possible to request a TOR in consideration of front obstacles or traffic density information in surrounding lanes, reducing the re-engagement time and stabilization time of manual driving, thereby improving the performance of autonomous vehicles. The results of the analysis are useful for vehicle developers designing safer human–machine interfaces and for governments developing guidelines for automated driving systems. When commercializing level 3 vehicles, governments should consider systems that can educate and evaluate drivers in obtaining licenses for automated vehicles. In the future, we will continue to work on how to monitor driver readiness and shorten TOR response times.
According to the literature [25], the combined time it takes for a person to perceive a threat and react to it is known as the perception–reaction time. This combined time is, of course, slightly longer than the reaction time. In cases relevant to accident reconstruction, it is often on the order of 1.5 s, although it can be slightly faster (near 0.7 s) if the situation is anticipated to some degree. Alternatively, a highly ambiguous situation, where the need for a reaction is not obvious, can result in an even longer perception–reaction time [25]. For the stable use of higher automated vehicles, there is a continuous need for research on how to shorten the perception–reaction time of drivers. In the future, we will continue to work on how to monitor driver readiness and shorten TOR perception and reaction times.
Author Contributions
Conceptualization, methodology, resources, data curation—original draft preparation: H.K., W.K., J.K. Writing—review and editing: H.K., J.J. Investigation: S.-J.L. Supervision, project administration: D.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by a grant (20TLRP-B131486-04) from the Transportation and Logistics R&D Program funded by the Ministry of Land, Infrastructure, and Transport of the The Republic of Korean government.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Park, M.; Lee, S.; Han, W. Development of Steering Control System for Autonomous Vehicle Using Geometry-Based Path Tracking Algorithm. ETRI J. 2015, 37, 617–625. [Google Scholar] [CrossRef]
- Noh, S.; Park, B.; An, K.; Koo, Y.; Han, W. Co-Pilot Agent for Vehicle/Driver Cooperative and Autonomous Driving. ETRI J. 2015, 37, 1032–1043. [Google Scholar] [CrossRef]
- Asljung, D.; Nilsson, J.; Fredriksson, J. Using Extreme Value Theory for Vehicle Level Safety Validation and Implications for Autonomous Vehicles. IEEE Trans. Intell. Veh. 2017, 2, 288–297. [Google Scholar] [CrossRef]
- Kuutti, S.; Fallah, S.; Katsaros, K.; Dianati, M.; McCullough, F.; Mouzakitis, A. A Survey of the State-of-the-Art Localization Techniques and Their Potentials for Autonomous Vehicle Applications. IEEE Internet Things J. 2018, 5, 829–846. [Google Scholar] [CrossRef]
- Marzbani, H.; Khayyam, H.; To, C.N.; Quoc, D.V.; Jazar, R.N. Autonomous Vehicles: Autodriver Algorithm and Vehicle Dynamics. IEEE Trans. Veh. Technol. 2019, 68, 3201–3211. [Google Scholar] [CrossRef]
- NHTSA. Available online: https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety#topic-road-self-driving (accessed on 18 January 2021).
- SAE J3016. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE: Warrendale, PA, USA, 2016. [Google Scholar]
- Morales-Alvarez, W.; Sipele, O.; Léberon, R.; Tadjine, H.H.; Olaverri-Monreal, C. Automated Driving: A Literature Review of the Take over Request in Conditional Automation. Electronics 2020, 9, 2087. [Google Scholar] [CrossRef]
- ISO/PDTR 21959; ISO TC 22/SC 139/WG 8. Road Vehicles: Human Performance and State in the Context 8 of Automated Driving: Part 1—Terms and Definitions; ISO: Geneva, Switzerland, 2018. [Google Scholar]
- Kim, H.; Kim, W.; Kim, J.; Lee, S.-J.; Yoon, D. A study on the effects of providing situation awareness information for the control authority transition of automated vehicle. In Proceedings of the 2019 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 16–18 October 2019; pp. 1394–1396. [Google Scholar]
- Cunninghama, M.; Regana, M.A. Autonomous vehicles: Human factors issues and future research. In Proceedings of the 2015 Australasian Road Safety Conference, Gold Coast, Queensland, Australia, 1 September 2015. [Google Scholar]
- Radlmayr, J.; Gold, C.; Lorenz, L.; Farid, M.; Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; SAGE Publications: Sauzend Oaks, CA, USA, 2014; Volume 58, pp. 2063–2067. [Google Scholar]
- Gold, C.; Körber, M.; Lechner, D.; Bengler, K. Taking over control from highly automated vehicles in complex traffic situations: The role of traffic density. Hum. Factors 2016, 58, 642–652. [Google Scholar] [CrossRef] [PubMed]
- Körber, M.; Gold, C.; Lechner, D.; Bengler, K. The influence of age on the take-over of vehicle control in highly automated driving. Transp. Res. Part. F Traffic Psychol. Behav. 2016, 39, 19–32. [Google Scholar] [CrossRef]
- Eriksson, A.; Stanton, N.A. Takeover time in highly automated vehicles: Noncritical transitions to and from manual control. Hum. Factors 2017, 59, 689–705. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Kim, H.-S.; Kim, W.; Yoon, D. Take-over performance analysis depending on the drivers’ non-driving secondary tasks in automated vehicles. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 17–19 October 2018; pp. 1364–1366. [Google Scholar]
- Naujoks, F.; Mai, C.; Neukum, A. The Effect of Urgency of Take-Over Requests during Highly Automated Driving under Distraction Conditions. Available online: https://www.researchgate.net/publication/264734018_The_Effect_of_Urgency_of_Take-Over_Requests_During_Highly_Automated_Driving_Under_Distraction_Conditions/link/53edf17a0cf23733e80b1b47/download (accessed on 31 January 2021).
- Kim, W.; Kim, J.; Kim, H.-S.; Lee, S.-J.; Yoon, D. A Study on the Driver’s Response Performance according to Modality of Planned TOR in Automated Driving. In Proceedings of the 2019 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 16–18 October 2019; pp. 1471–1473. [Google Scholar]
- Rao, V. Introduction to Classification & Regression Trees (CART). Available online: https://www.datasciencecentral.com/profiles/blogs/introduction-to-classification-regression-trees-cart (accessed on 30 November 2020).
- Zimmerman, R.K.; Balasubramani, G.K.; Nowalk, M.P.; Eng, H.F.; Urbanski, L.; Jackson, M.L.; Jackson, L.A.; McLean, H.Q.; Belongia, E.A.; Monto, A.S.; et al. Classification and Regression Tree (CART) analysis to predict influenza in primary care patients. BMC Infect. Dis. 2016, 16, 503. [Google Scholar] [CrossRef] [PubMed]
- Han, J.; Kamber, M.; Pei, J. Decision tree induction. In Data Mining: Concepts and Techniques, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 2012; pp. 330–349. [Google Scholar]
- Federal Highway Research Institute (BASt). Explanation of 5.6.1.4 Transition demand and system operation during transition. In Informal Document—ACSF-05-07; Federal Highway Research Institute: Bergisch Gladbach, Germany, 2016. [Google Scholar]
- Aoki, M.; Fujii, H. Inter-vehicle communication: Technical issues on vehicle control application. IEEE Commun. Mag. 1996, 34, 90–93. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Liu, Z.; Lee, H.; Omar Khyam, M.; He, J.; Pesch, D.; Moessner, K.; Saad, W.; Vincent Poor, H. 6G for Vehicle-to-Everything (V2X) communications: Enabling technologies, challenges, and opportunities. arXiv 2020, arXiv:2012.07753. Available online: https://arxiv.org/abs/2012.07753 (accessed on 18 January 2021).
- Technology Associates. Available online: http://www.technology-assoc.com/articles/reaction-time.html (accessed on 18 January 2021).






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).