
Performance Analysis and Design Considerations of the Shallow Underwater Optical Wireless Communication System with Solar Noises Utilizing a Photon Tracing-Based Simulation Platform



Abstract
:1. Introduction
2. Principle
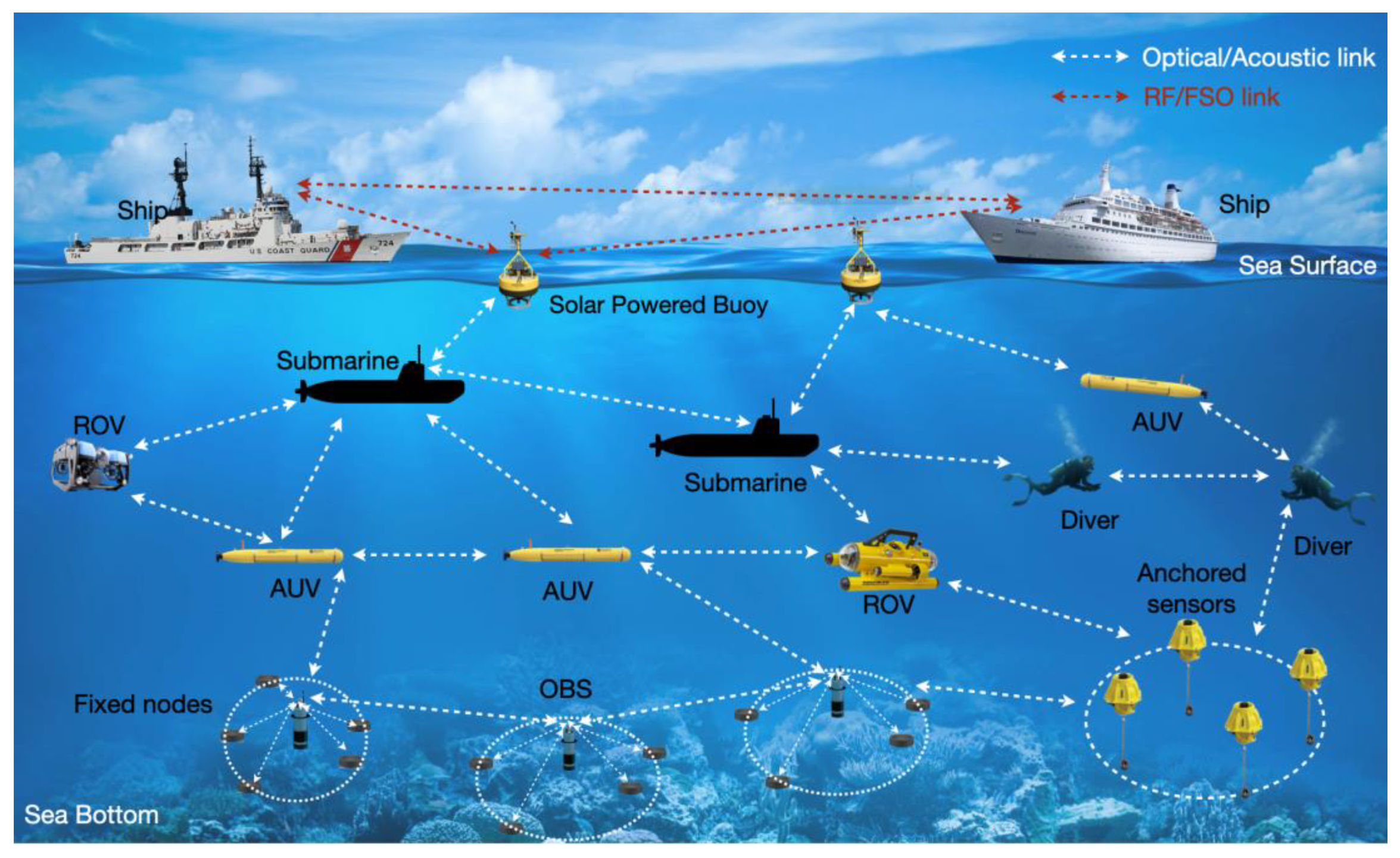
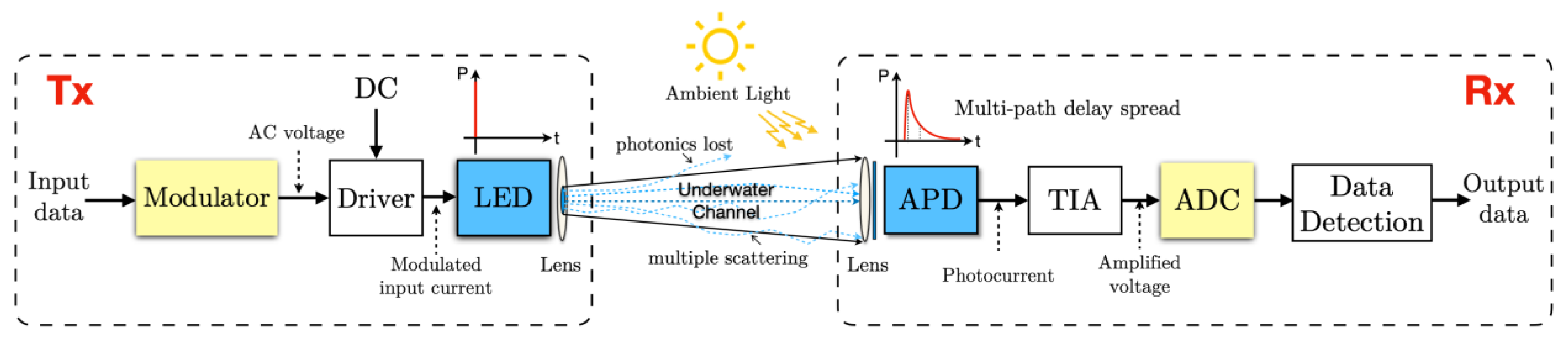
2.1. UOWC System Model
- Pure sea water—absorption effect is the major limiting factor. The light propagation trajectory is nearly a straight line due to the low scattering coefficient.
- Clear ocean water—Concentration of dissolved particles is higher than that in pure sea water, leading to an emerging scattering effect.
- Coastal water—Concentration of suspended matter and detritus becomes much higher in that it affects both absorption and scattering.
- Turbid harbor water—Concentration of planktonic matter, dissolved particles and mineral components is highest among the four water types, which can cause severe light scattering effect and attenuation.
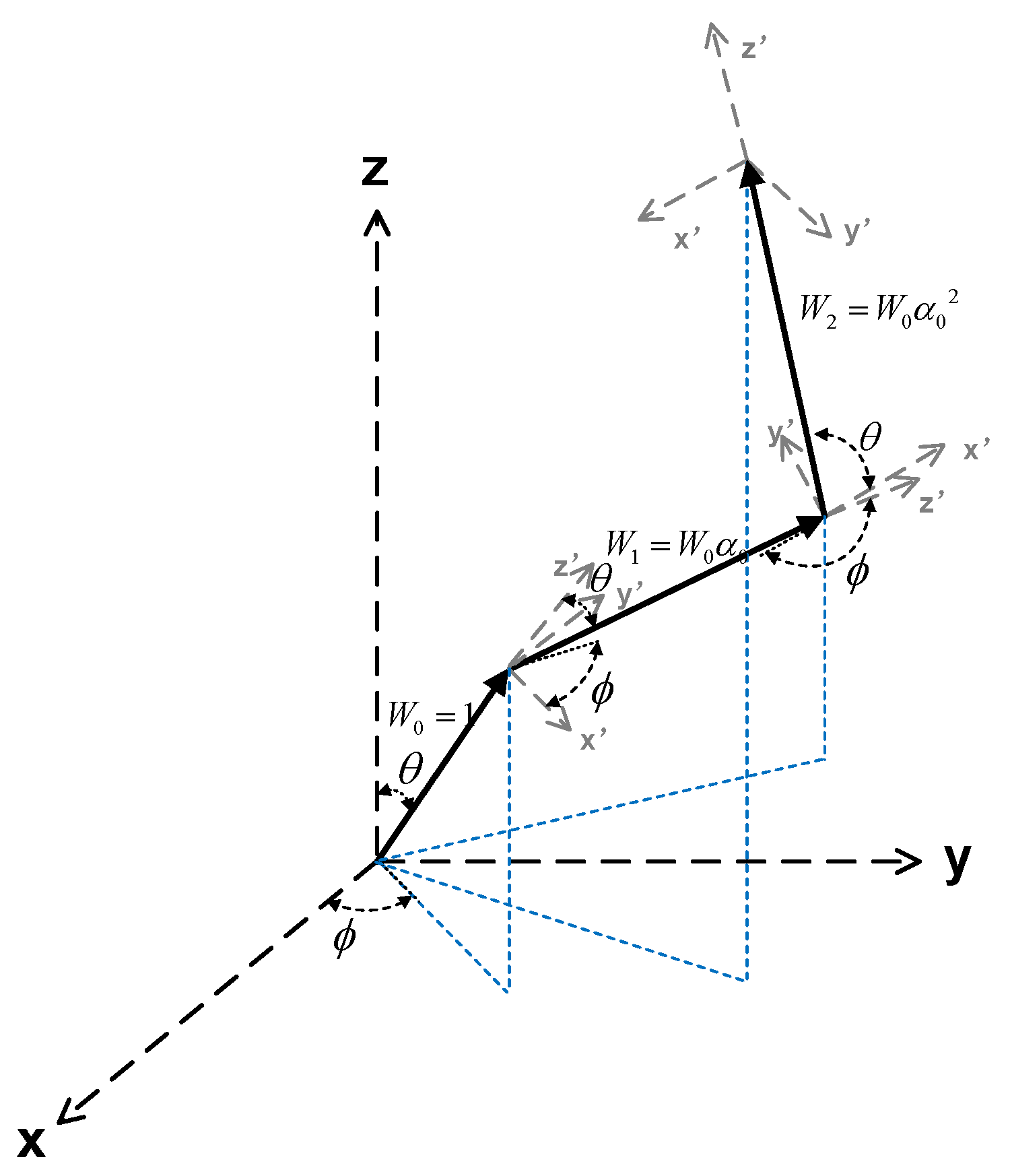
2.2. Photon Tracing Algorithm
2.3. Noise Modeling
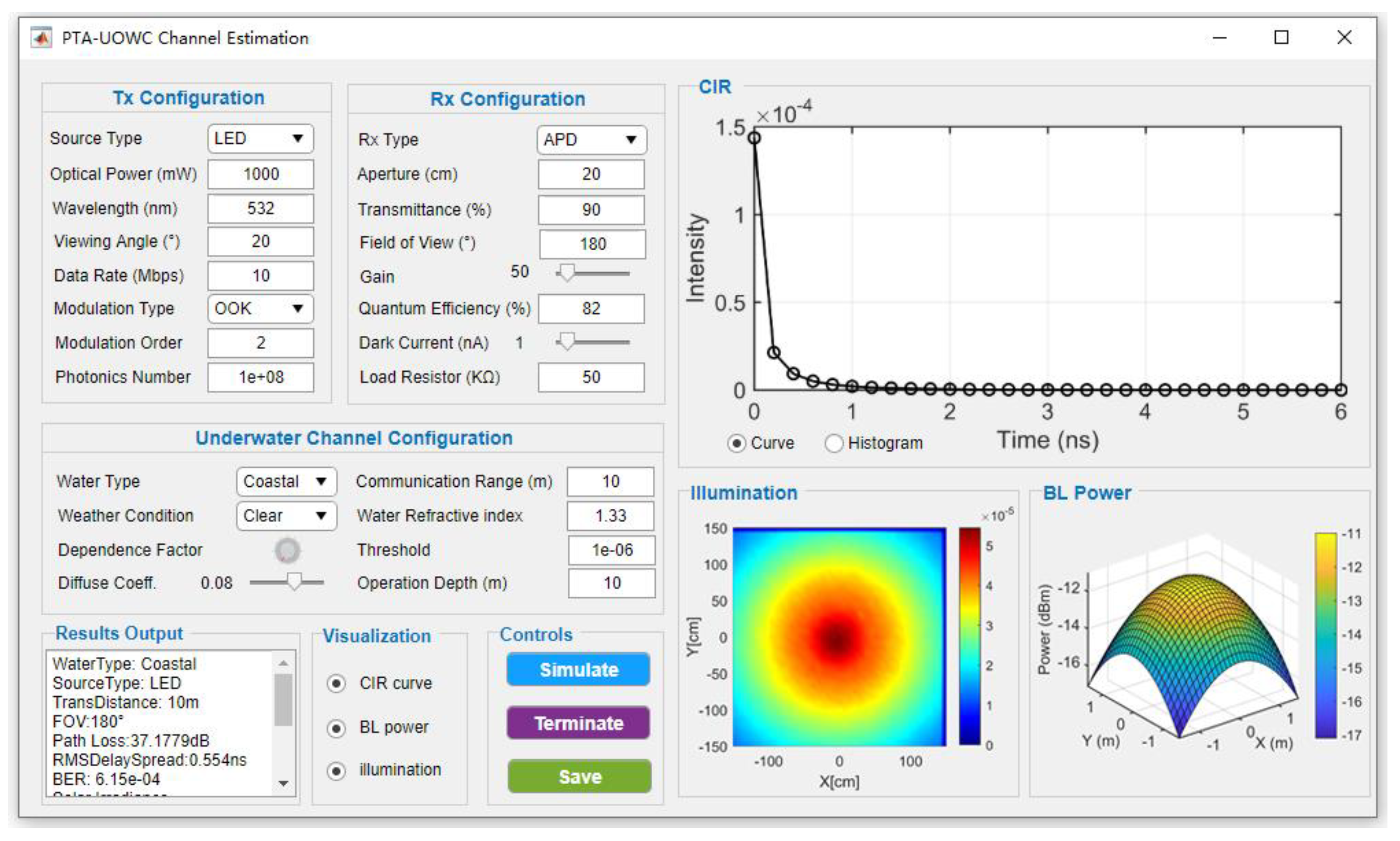
2.4. Graphical User Interface Design
3. Results and Discussions
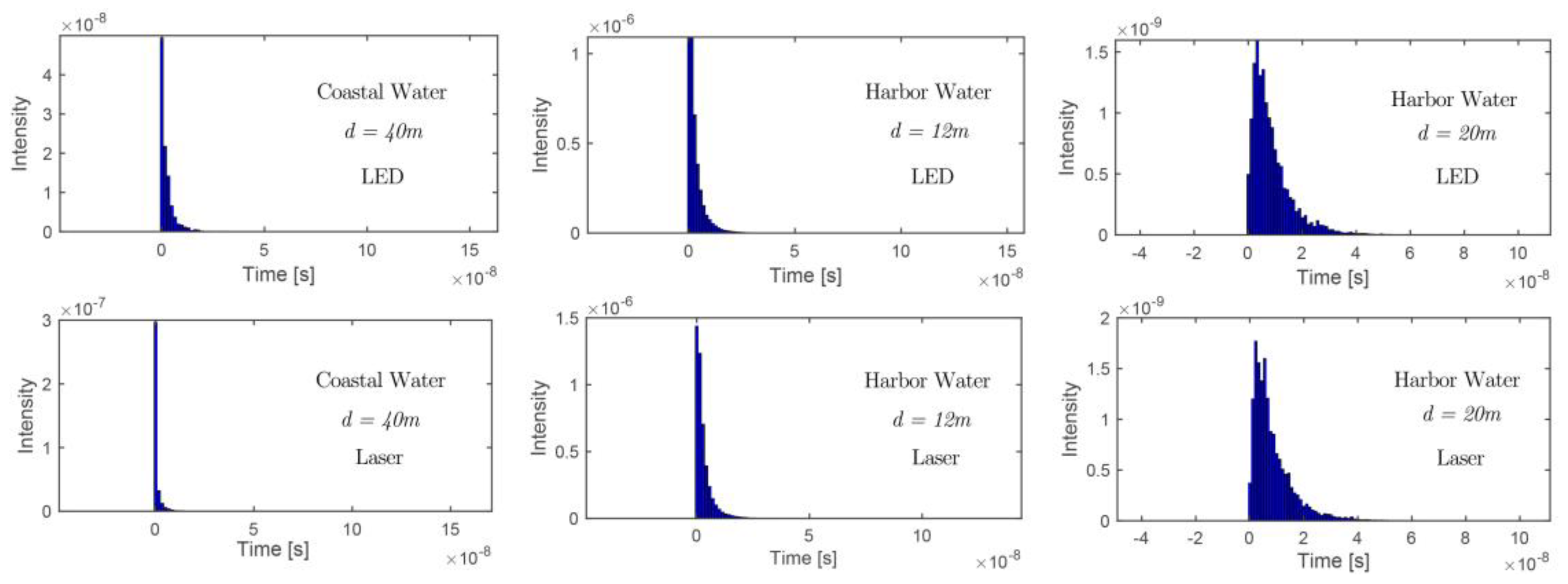
3.1. Temporal Dispersion
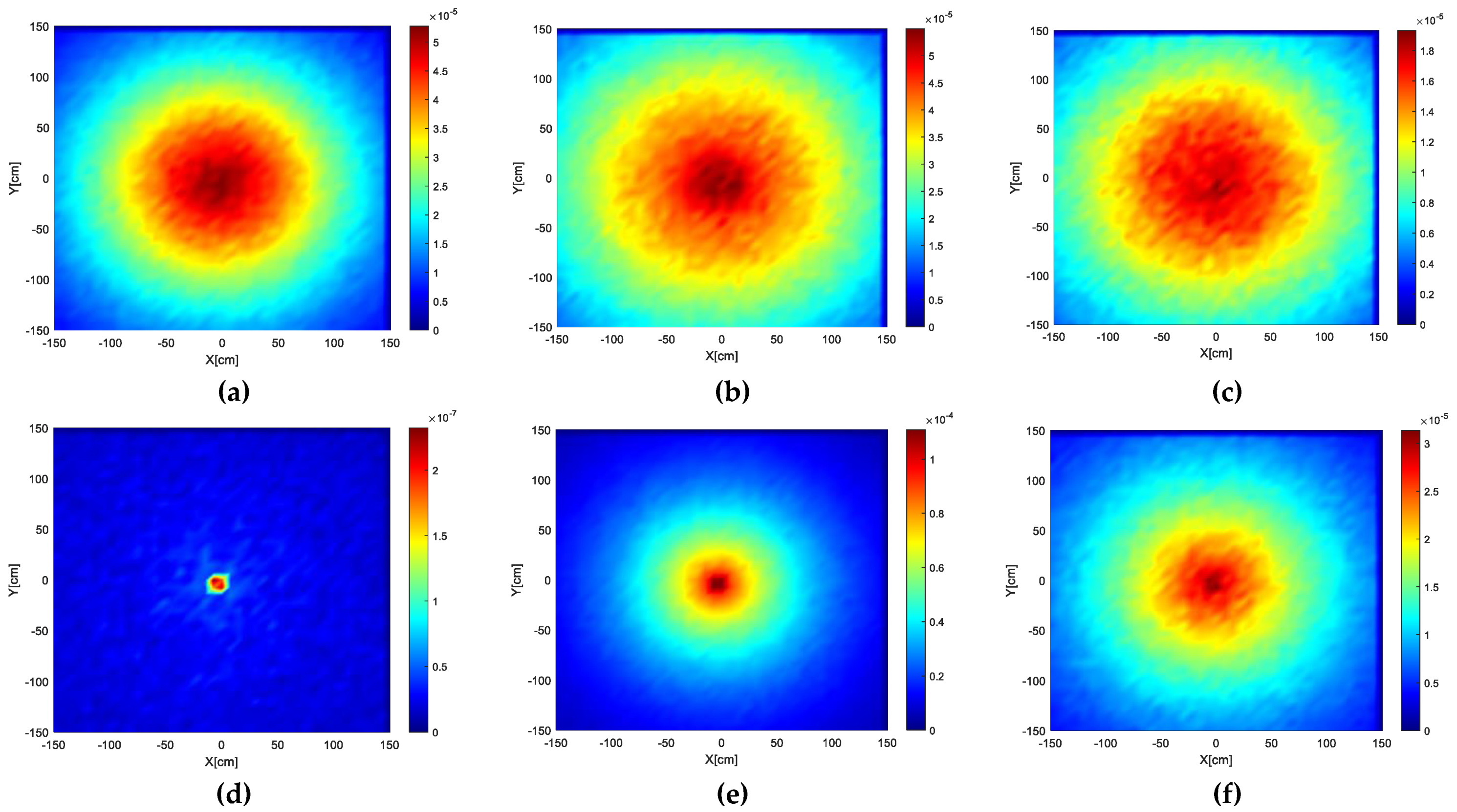
3.2. Spatial Illumination Pattern
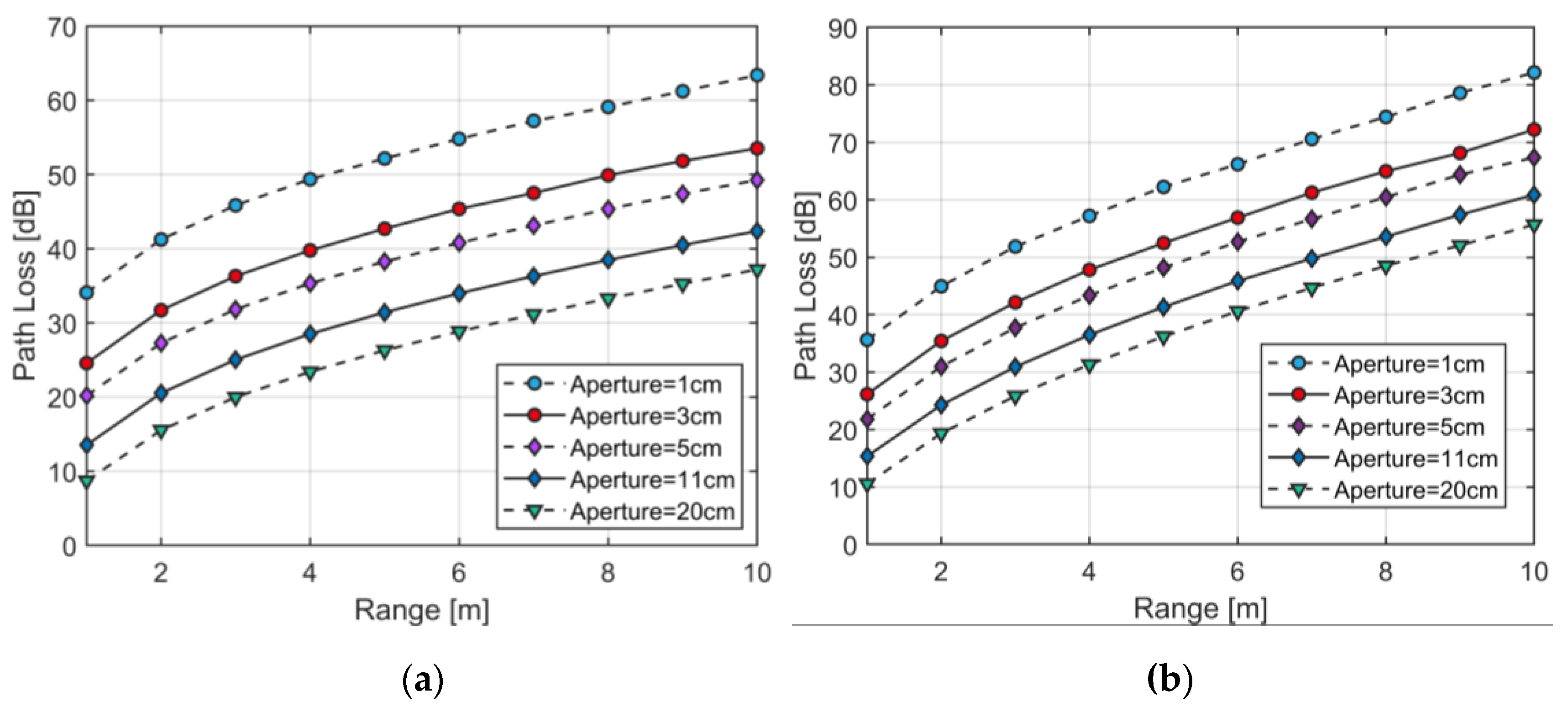
3.3. Statistical Attenuation
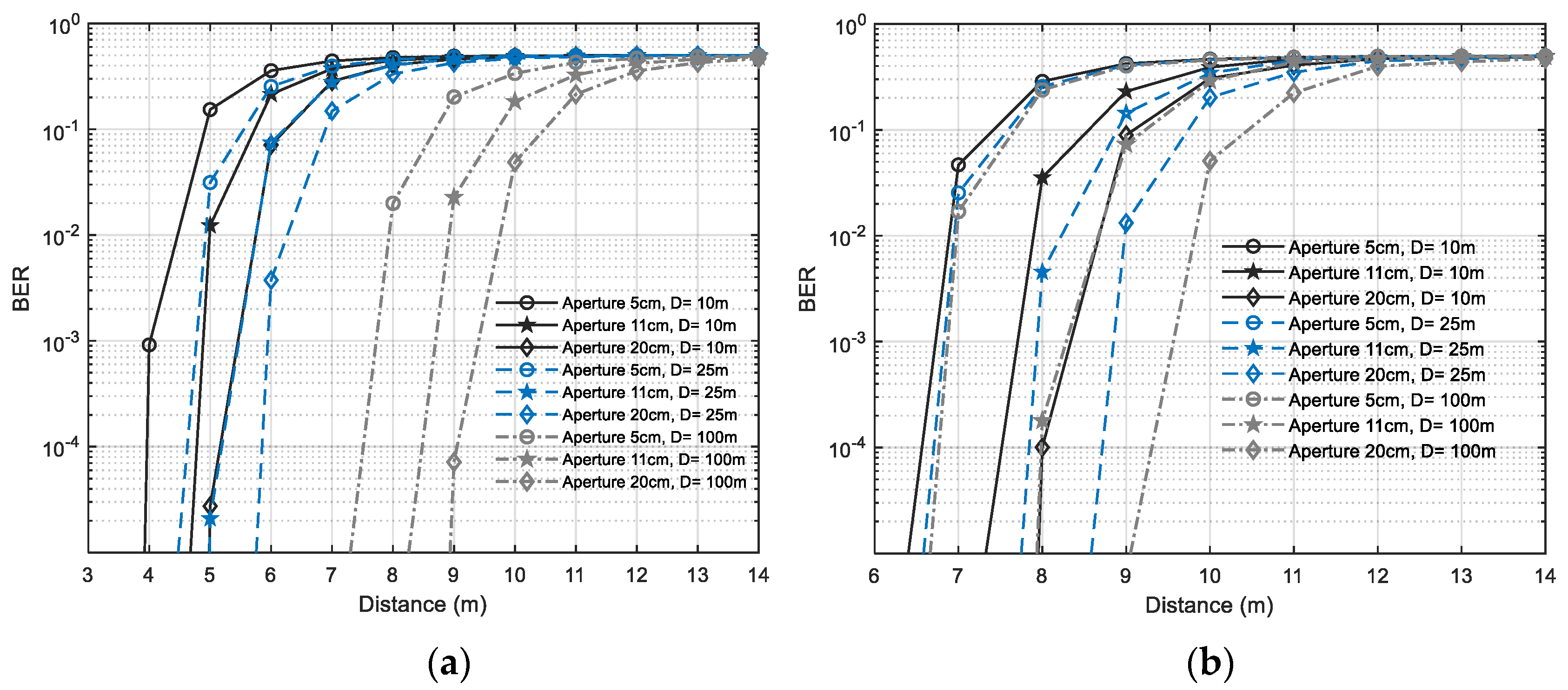
3.4. BER Performance
3.5. Design Considerations
- Tx considerations: The optical source determines the optical output power and light divergence. The choice of LED or laser is scenario-specific and depends on the degree of alignment difficulty, if the tracking and pointing equipment is available for just point-to-point link, the collimation property and large power of laser (Figure 6) can help mitigate the temporal dispersion to achieve longer range and higher data rate. If the alignment is hard or more Rx users need to be covered, LED is a good choice. However, in turbid waters, illumination patterns of LED and laser both show significant spatial spread at the Rx plane (Figure 7), thus, the LED no longer has the merit of easy alignment and laser should be used under such a condition.
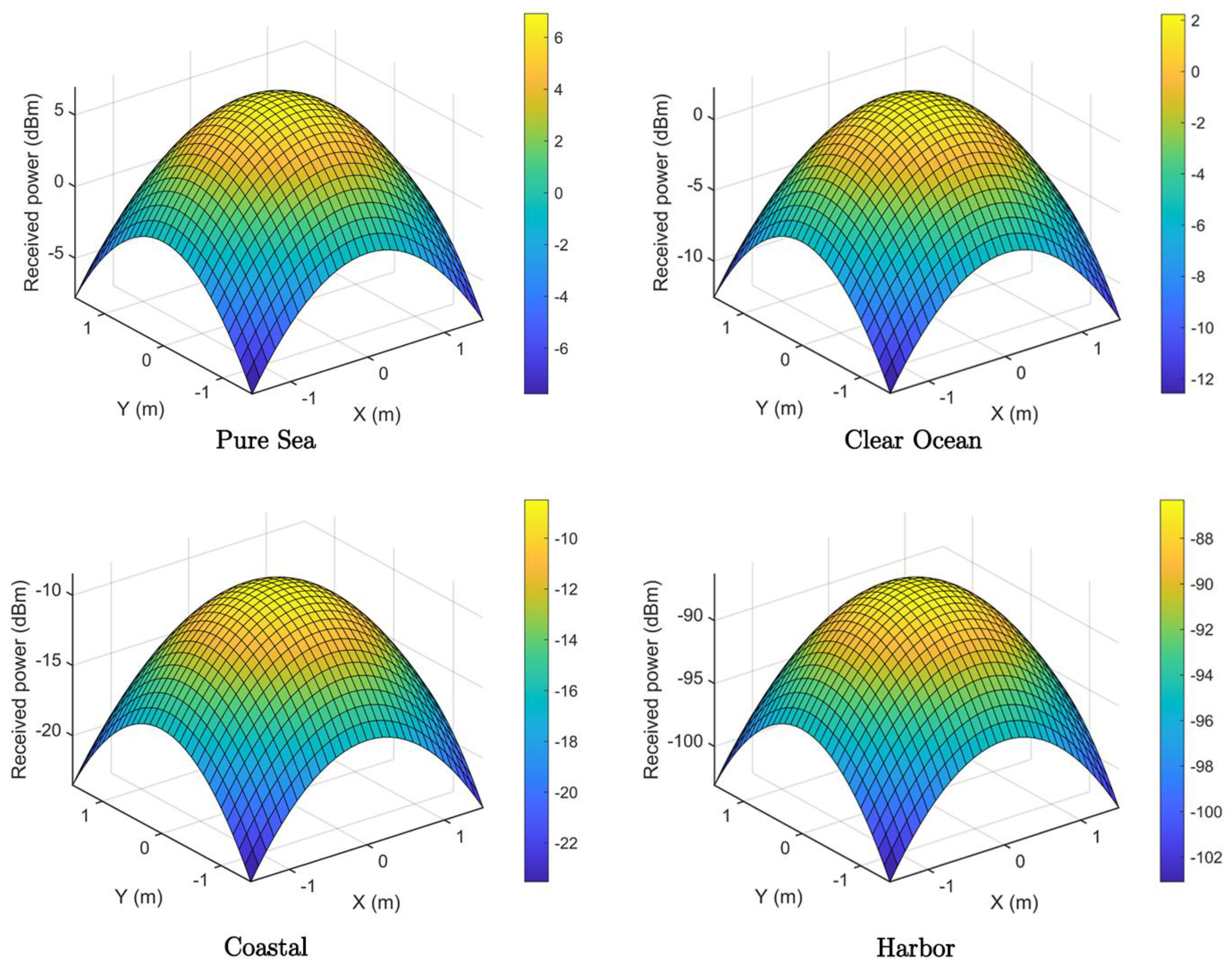
- Rx considerations: Although more optical signals can be received by using larger aperture size and wider FOV, they also result in more solar noises captured at the Rx in the shallow UOWC environment. Based on the simulation results of BER performance (Figure 11 and Figure 12), we suggest employing a large aperture combined with a narrow FOV angle to guarantee enough optical power at the Rx plane (Figure 10) and mitigate the SNR degradation. In addition, the optical filter in front of the detector is also important in determining the Rx’s sensitivity to solar irradiance radiation. An optical filter with narrow bandwidth can reduce the system FOV and suppress ambient noises.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zeng, Z.; Fu, S.; Zhang, H.; Dong, Y.; Cheng, J. A survey of underwater optical wireless communications. IEEE Commun. Surv. Tutor. 2016, 19, 204–238. [Google Scholar] [CrossRef]
- Khalighi, M.A.; Uysal, M. Survey on free space optical communication: A communication theory perspective. IEEE Commun. Surv. Tutor. 2014, 16, 2231–2258. [Google Scholar] [CrossRef]
- Li, J.; Yang, B.; Ye, D.; Wang, L.; Fu, K.; Piao, J.; Wang, Y. A real-time, full-duplex system for underwater wireless optical communication: Hardware structure and optical link model. IEEE Access 2020, 8, 109372–109387. [Google Scholar] [CrossRef]
- Yang, P.; Xiao, Y.; Xiao, M.; Li, S. 6G wireless communications: Vision and potential techniques. IEEE Netw. 2019, 33, 70–75. [Google Scholar] [CrossRef]
- Lee, Y.U. Secure Visible Light Communication Technique Based on Asymmetric Data Encryption for 6G Communication Service. Electronics 2020, 9, 1847. [Google Scholar] [CrossRef]
- Lian, J.; Gao, Y.; Wang, H. Underwater optical wireless sensor networks using resource allocation. Telecommun. Syst. 2019, 71, 529–539. [Google Scholar] [CrossRef]
- Sun, X.; Kang, C.H.; Kong, M.; Alkhazragi, O.; Guo, Y.; Ouhssain, M.; Ooi, B.S. A review on practical considerations and solutions in underwater wireless optical communication. J. Lightwave Technol. 2020, 38, 421–431. [Google Scholar] [CrossRef] [Green Version]
- Cochenour, B.M.; Mullen, L.J.; Laux, A.E. Characterization of the beam-spread function for underwater wireless optical communications links. IEEE J. Ocean. Eng. 2008, 33, 513–521. [Google Scholar] [CrossRef]
- Jaruwatanadilok, S. Underwater wireless optical communication channel modeling and performance evaluation using vector radiative transfer theory. IEEE J. Sel. Areas Commun. 2008, 26, 1620–1627. [Google Scholar] [CrossRef]
- Li, C.; Park, K.H.; Alouini, M.S. On the use of a direct radiative transfer equation solver for path loss calculation in underwater optical wireless channels. IEEE Wireless. Commun. Lett. 2015, 4, 561–564. [Google Scholar] [CrossRef] [Green Version]
- Smart, J.H. Underwater Optical Communications Systems Part 1: Variability of Water Optical Parameters. In Proceedings of the IEEE Military Communications Conference (MILCOM’05), Atlantic City, NJ, USA, 17–20 October 2005; pp. 1140–1146. [Google Scholar]
- Cochenour, B.; Mullen, L.; Muth, J. Temporal response of the underwater optical channel for high-bandwidth wireless laser communications. IEEE J. Ocean. Eng. 2013, 38, 730–742. [Google Scholar] [CrossRef]
- Hanson, F.; Radic, S. High bandwidth underwater optical communication. Appl. Opt. 2008, 47, 277–283. [Google Scholar] [CrossRef] [PubMed]
- Gabriel, C.; Khalighi, M.A.; Bourennane, S.; Léon, P.; Rigaud, V. Monte-Carlo-based channel characterization for underwater optical communication systems. J. Opt. Commun. Netw. 2013, 5, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Zou, D.; Wang, P.; Xu, Z.; Yang, L. Wavelength Dependent Channel Characterization for Underwater Optical Wireless Communications. In Proceedings of the IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Guilin, China, 5–8 August 2014; pp. 895–899. [Google Scholar]
- Liu, W.; Zou, D.; Xu, Z.; Yu, J. Non-Line-of-Sight Scattering Channel Modeling for Underwater Optical Wireless Communication. In Proceedings of the IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 1265–1268. [Google Scholar]
- Dong, F.; Xu, L.; Jiang, D.; Zhang, T. Monte-Carlo-based impulse response modeling for underwater wireless optical communication. Prog. Electromagn. Res. 2017, 54, 137–144. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; He, F.; Guo, Q.; Wang, M.; Zhang, J.; Duan, Z. Analysis of underwater wireless optical communication system performance. Appl. Opt. 2019, 58, 9808–9814. [Google Scholar] [CrossRef]
- Boluda-Ruiz, R.; Rico-Pinazo, P.; Castillo-Vázquez, B.; García-Zambrana, A.; Qaraqe, K. Impulse Response Modeling of Underwater Optical Scattering Channels for Wireless Communication. IEEE Photon. J. 2020, 12, 1–14. [Google Scholar] [CrossRef]
- Cox, W.; Muth, J. Simulating channel losses in an underwater optical communication system. J. Opt. Soc. Am. 2014, 31, 920–934. [Google Scholar] [CrossRef]
- Leathers, R.A.; Downes, T.V.; Davis, C.O.; Mobley, C.D. Monte Carlo Radiative Transfer Simulations for Ocean Optics: A Practical Guide; Tech. Rep. NRL/MR/5660–04-8819; Naval Research Lab: Washington, DC, USA, 2004. [Google Scholar]
- Ghassemlooy, Z.; Popoola, W.O.; Rajbhandari, S. Optical Wireless Communications System and Channel Modelling with MATLAB®, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2012; pp. 81–90. [Google Scholar]
- Khalil, R.A.; Babar, M.I.; Saeed, N.; Jan, T.; Cho, H.S. Effect of link misalignment in the Optical-Internet of underwater things. Electronics 2020, 9, 646. [Google Scholar] [CrossRef] [Green Version]
- Mobley, C.D. Light and Water: Radiative Transfer in Natural Waters; Academic Press: Cambridge, MA, USA, 1994. [Google Scholar]
- Zhou, H.; Zhang, M.; Wang, X.; Ren, X. Implementation of High Gain Optical Receiver with the Large Photosensitive Area in Visible Light Communication. In Proceedings of the Asia Communications and Photonics Conference (ACP), Chengdu, China, 2–5 November 2019; p. M4A.101. [Google Scholar]
- Xu, F.; Khalighi, M.A.; Bourennane, S. Impact of Different Noise Sources on the Performance of PIN-and APD-based FSO Receivers. In Proceedings of the 11th International Conference on Telecommunications (ConTEL), Graz, Austria, 15–17 June 2011; pp. 211–218. [Google Scholar]
- Duntley, S.Q. Light in the sea. J. Opt. Soc. Am. 1963, 53, 214–233. [Google Scholar] [CrossRef]
- Mobley, C.D. Ocean Optics Web Book. Available online: https://www.oceanopticsbook.info/view/light-and-radiometry/introduction (accessed on 6 January 2021).
- Lee, Z.P.; Darecki, M.; Carder, K.L.; Davis, C.O.; Stramski, D.; Rhea, W.J. Diffuse attenuation coefficient of downwelling irradiance: An evaluation of remote sensing methods. J. Geophys. Res. Ocean. 2005, 110, 1–9. [Google Scholar] [CrossRef]
- Nababan, B.; Louhenapessy, V.S.; Arhatin, R.E. Downwelling Diffuse attenuation coefficients from in situ measurements of different water types. Int. J. Remote Sens. Earth Sci. 2013, 10, 122–132. [Google Scholar] [CrossRef] [Green Version]
- Ju, M.; Huang, P.; Li, Y.; Shi, H. Effect of Receiver’s Tilted Angle on the Capacity for Underwater Wireless Optical Communication. Electronics 2020, 9, 2072. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, Y.; Yuan, X.; Zhang, J. Mathematic models for a ray tracing method and its applications in wireless optical communications. Opt. Express 2010, 18, 18431–18437. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modeling Approach | Advantages | Shortcomings | Main Characteristics | Solar Irradiance | References |
|---|---|---|---|---|---|
| Beer–Lambert’s law | Simple and efficient | Inaccurate, unable to analyze the delay spread effect | Path loss (PL) | N | [11,12] |
| Experimental modeling | Real measured validation data | High cost, difficult to deduce the impact of transceiver configurations | PL, h(t) | N | [13] |
| Analytical RTE | Analytical results | Very difficult derivation | PL | N | [8,9,10] |
| Numerical RTE | Easy Programming | Low efficiency in case of error | PL, h(t), | N | [14,18] |
| Chlorophyl Monte-Carlo | Accurate in simulation environment | Less efficient for errors | PL, h(t), H(f), | N | [15,16] |
| MC-Curve Fitting | Accurate results | Time consuming | H(0), h(t), | N | [17,19] |
| Water Type | a (m−1) | b (m−1) | c (m−1) |
|---|---|---|---|
| Pure sea | 0.0405 | 0.0025 | 0.043 |
| Clear ocean | 0.114 | 0.037 | 0.151 |
| Coastal | 0.179 | 0.219 | 0.398 |
| Turbid harbor | 0.366 | 1.824 | 2.190 |
| Parameter | Symbol | Value |
|---|---|---|
| LED semi-angle at half power | (15°, 20°) | |
| Laser divergence angle | (0.75, 1) mrad | |
| Link range | 1–35 m | |
| Water refractive index | 1.33 | |
| Total number of transmitted photons | 108 | |
| Aperture diameter | 5, 11, 20 cm | |
| Depth | 10, 25, 100 m | |
| Weight threshold | 10−6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Zhang, M.; Zhou, H.; Ren, X. Performance Analysis and Design Considerations of the Shallow Underwater Optical Wireless Communication System with Solar Noises Utilizing a Photon Tracing-Based Simulation Platform. Electronics 2021, 10, 632. https://doi.org/10.3390/electronics10050632
Wang X, Zhang M, Zhou H, Ren X. Performance Analysis and Design Considerations of the Shallow Underwater Optical Wireless Communication System with Solar Noises Utilizing a Photon Tracing-Based Simulation Platform. Electronics. 2021; 10(5):632. https://doi.org/10.3390/electronics10050632
Chicago/Turabian StyleWang, Xiaozheng, Minglun Zhang, Hongyu Zhou, and Xiaomin Ren. 2021. "Performance Analysis and Design Considerations of the Shallow Underwater Optical Wireless Communication System with Solar Noises Utilizing a Photon Tracing-Based Simulation Platform" Electronics 10, no. 5: 632. https://doi.org/10.3390/electronics10050632