1. Introduction
Deep learning is currently revolutionizing many machine learning applications such as computer vision, natural language processing, and autonomous systems. Deep learning is based upon architectures of artificial neural networks containing many hidden layers. While training such architectures was once impractical, the availability of large volumes of data, hardware acceleration, and improved algorithms have made deep artificial neural networks a viable alternative for many applications. As a result, deep learning has demonstrated increasingly superior performance, even exceeding human accuracy in some domains.
Overall, deep learning solutions are deployed via a two-stage process. During the first stage, the DNN model is learned by presenting the network with a training data set and, in the case of supervised learning, adjusting the network weights based on observed prediction error. For example, in the case of image processing, the network would be trained by providing it thousands of different images. Obviously, this stage is computationally intensive, often requiring multi-threaded GPUs or other high-performance computing clusters. Typically performed offline or in the cloud, this stage could take hours or even days, depending on the amount of data required to train the system adequately.
Inference is the next stage of the deployment pipeline, where the trained model is installed on the target hardware and used to infer or predict the output values used directly by the target processor. This target system (i.e., edge or end device) would then process its raw sensor data, providing that data as input to the deployed deep learning model, and using the model’s output to classify the inputs. For example, an image classifier application could process raw camera data to recognize various categories of ordinary objects.
Depending on the application, the inference stage may have a much lower latency requirement, usually in the range of milliseconds instead of hours or days compared to the training phase. Examples of these types of systems would include autonomous vehicles, robotic systems, or other safety-critical embedded systems. As a result of these latency requirements, there has been a significant amount of effort focused on developing new hardware and software techniques for faster inference solutions.
On the hardware side, there are numerous reports [
1,
2,
3] that custom-designed chips for machine learning will deliver an order of magnitude acceleration improvement over current platforms. While the training phase will likely still reside in traditional data centers, there is a much higher possibility that the inference phase will run on the edge in some embedded computing device. There are many reasons for moving computing closer to where sensors gather data, including reliability, limiting network bandwidth, providing improved security, or more effective resource management of deep learning applications. This challenge is gaining research traction, for example, in [
4], authors discuss the deep learning memory challenge caused by scarce availability of memory. They propose a combination of techniques for deployment of next-generation of on-chip machine learning including hardware-aware DNNs that could allow for this stage to be on-chip as opposed to offline. In the work of [
5], authors also acknowledge the importance of online scalability of deep learning algorithms and propose an architecture that supports an always-on inference and learning engine through on-chip learning. This algorithm leverages a crossbar array structure to perform vector-matrix multiplications and enables online training of multi-layer SNNs with memristive neuromorphic hardware. Their results show minimal performance loss when compared with current state-of-the-art technology. Further, authors of [
6], developed an end-to-end framework, DNN+NeuroSim V2.0, to benchmark compute-in-memory-based architectures for on-chip training.
With the shift to on-device inference, the question becomes what type of embedded hardware and configuration will produce the fastest and most efficient deep learning platforms. One particular platform that is gaining significant traction is system-on-a-chip (SoC) architecture. SoCs include various peripherals and computing components on an integrated circuit that can satisfy even some of the most stringent processing requirements for an embedded application. For this reason, SoCs are often considered as an excellent solution for implementing deep-learning applications on embedded systems. In fact, many experts are predicting that most of the effort spent on accelerating inference performance will go towards embedded hardware solutions such as SoCs or other custom processing elements like field-programmable gate arrays (FPGAs).
However, many of those machine learning applications intended to execute on the targeted hardware platforms require real-time performance and must operate under strict timing constraints. For instance, consider the video stream from the camera on a self-driving car. The data must be processed in real-time with predictable behavior so that other critical subsystems (e.g., route planning) are able to respond in a timely manner to a rapidly changing environment (e.g., to avoid collisions). Or, perhaps, consider the cybersecurity domain, where fast and efficient intrusion detection is essential to protect the system itself [
7]. In both cases, the runtime performance of the underlying models must be deterministic.
The challenge is that traditional machine learning applications are developed for server, desktop, or hand-held-based platforms that cannot process input data in a predictable amount of time. The reason for this is two-fold. One reason is that the machine learning- based applications typically run on general purpose operating systems (GPOS), such as Linux, which by default are not real-time. The other is that SoCs’ heterogeneous processing is routinely under-utilized in general purpose computing environments because embedded devices require an in-depth knowledge of various hardware architectures and interfaces.
To resolve some of the issues described in the previous paragraphs, we present an online feedback-based real-time scheduling and resource management framework (FC-RTS) for deep learning inference on embedded heterogeneous SoC-based architectures. In this work, we leverage a real-time operating system (RTOS) to replace current GPOSs for the purpose of providing more deterministic behavior and a higher granularity of control over hardware components. To effectively manage unpredictable inference times, we leverage feedback mechanisms to dynamically reallocate processing resource elements based on an application’s criticality. This approach is to ensure that the most critical real-time tasks (e.g., collision avoidance) will not be affected during sudden workload spikes. To demonstrate our framework’s utility, we integrate it with a computer vision task based on deep learning and convolutional neural networks. We choose this task for two reasons. First of all, deep learning models are some of the largest and most computationally intense models in the entirety of machine learning, and so the ability of our framework to perform well on a deep learning task would indicate that it could generalize to other machine learning approaches. Secondly, computer vision problems are a central part of autonomous systems research, and therefore of broad interest to the real-time machine learning community. The authors in [
8] highlight the importance of timeliness for safety in computing systems for autonomous driving. Autonomous vehicles take in a myriad of real-time data which needs to be processed and assessed with deep learning algorithms. The vehicles, however, need to respond to safety threats almost instantly and therefore need an RTOS to satisfy the system’s desired response time. By considering the above issues, this paper makes the following contributions: (1) The introduction of a real-time resource management framework that can support deep learning at the edge; (2) The integration of that framework with a major commercial real-time operating system (VxWorks) on a commodity embedded platform.
To describe this new framework, we organize the remaining sections of this paper as follows. The next section provides some background and overview to provide a reference for the methodologies and approaches used by our adaptive framework.
Section 3 will present some related work involving deep learning inference as well as multiprocessor scheduling for heterogeneous systems (e.g., systems that utilize multiple cores of different types, such as a combination of CPUs and GPUs).
Section 4 provides details on our framework’s implementation, while
Section 5 covers the performance analysis related to a specific application.
Section 6 covers the physical implementation as well as the simulation environment and representative hardware implementation. Finally,
Section 7 provides a summary of results discovered thus far as well as future work and recommended enhancements to FC-RTS.
2. Preliminaries
This section is used to provide some technical background information on the techniques used as well as the terminology needed to define our real-time management framework for SoC-based platforms.
2.1. Task Model
Each embedded machine learning application (e.g., image processing or collision avoidance) consists of one or more real-time tasks. A real-time task is defined as any task that must meet its timing constraints. The timing constraints are traditionally represented as a 3-tuple where defines the task period (time interval where the task instance needs complete execution), denotes the worst case execution time (WCET) of the task, and defines the relative deadline of a task (relative to the start of the task as to when the task needs to finish execution). Therefore, each application can then be represented as a task set of one or more tasks consisting of , where each task is defined as . It is assumed that each task is a constrained task, such that .
Other important characteristics of real-time tasks include task priority, release time, absolute deadline and the utilization of a task. The priority of a task determines what task is chosen to execute first. The release time defines when a task is ready to execute, not necessarily when it is allowed to execute. The absolute deadline defines the relative time when the task is started compared to when it must complete. Note that a task which cannot miss a single deadline is classified as hard real-time, whereas a task that can tolerate some missed deadlines is known as soft real-time. Utilization is defined as the ratio between the period of the task and its WCET.
Additionally, there are three different categories of real-time tasks: periodic, sporadic, and aperiodic. A periodic task is where an instance of the task is released at the start of each period. A sporadic task does not have a period but has a minimum interval of time between releasing another instance of the task. An aperiodic task has no period nor time interval between tasks. Aperiodic tasks are especially challenging to plan for because they can happen at any time, such as when a system is interrupted to handle some asynchronous event. These characteristics are worth mentioning in that an embedded machine learning application may contain any combination of task types listed above and therefore needs to be accounted for when planning on doing any on-device inference.
2.2. Real-Time Scheduling
It is up to a scheduling algorithm to determine which tasks get to execute and for how long. There are several important characteristics of real-time scheduling algorithms that are worth mentioning. The first is whether a task is preemptive or non-preemptive. A preemptive task is one that can be interrupted at any time, allowing other tasks to run. In contrast, a non-preemptive task is allowed to continue uninterrupted. This is an important concept related to how we manage the scheduling of tasks in a heterogeneous processing architecture.
Another key characteristic of real-time scheduling is the notion of priority. In a priority-based scheduling scheme, the task with the highest priority gets to run first, where priority can be assigned either statically or dynamically. In a static or fixed priority scheme, each task is assigned a priority that does not change during the task’s lifetime. An example of a fixed priority scheme is the Rate Monotonic (RM) algorithm where the priority of a task is determined by the inverse of its period. In a dynamic priority scheme, the priority of a task can change during the lifetime of the task. The most common example of dynamic priority scheduling is the Earliest Deadline First (EDF) algorithm, where the priority of a task can change depending upon the task with the nearest deadline that is ready to run.
2.3. Multiprocessor Real-Time Scheduling
Up to this point, the scheduling schemes described in
Section 2.2 apply to systems with a single processor. However, SoC-type devices typically consist of multicore-based architectures. A few main multiprocessor or multicore scheduling algorithms are designed to manage multicore architectures: partitioned scheduling, global scheduling, and a third hybrid type that combines elements of the other two approaches. In the partitioned scheduling approach, tasks are assigned to a specific processor and not allowed to migrate to other processors even if those processors are under-utilized. This leads to the challenge of efficiently assigning tasks to processors, which is analogous to the bin packing problem, which is proven to be NP-Hard [
9].
Global scheduling solves the complexity problem of the partitioned approach because a single global scheduler assigns tasks. Another key advantage of global scheduling is that it typically requires fewer preemptions as the scheduler will only preempt a task if there is no idle processor. Global scheduling is more suitable for open systems where new tasks arrive dynamically, as a new task can be added easily to an existing schedule without assigning it to a particular partition. A primary disadvantage is the significant overhead incurred when a task is allowed to migrate to another processor or core.
Additional challenges are based upon the notion that SoCs are heterogeneous architectures with one or more general purpose processors (CPUs) with one or more synergistic coprocessors (e.g., GPUs or DSPs) meant to deliver increased performance and power efficiency. However, the multiprocessing scheduling mechanisms mentioned previously present certain obstacles in heterogeneous multiprocessor systems due to the significant overhead involved in the preemption of tasks running in the coprocessor. This overhead is an architectural side-effect related to the number of registers, pipeline stages, and cache flushes [
10,
11] associated with the coprocessor. Therefore, the traditional way of scheduling the coprocessor, to reduce this incurred overhead, has been to designate that the CPU schedules both the CPU-bound tasks and the coprocessor-bound non-preemptive tasks.
In practice, the GPU or DSP is considered a functional accelerator, much like a floating-point coprocessor, that responds to processing requests from the CPU [
12]. However, the scheduling problems of heterogeneous multicore systems are complicated by the precedence constraints imposed by the master-slave relationship of the processor and coprocessor. The CPU invokes the coprocessor code in a similar manner as a remote procedure call (RPC), which is initially executed on the processor and then dispatched to execute specific instructions on the coprocessor. This means each task that utilizes a GPU or DSP will initially execute on the processor, at time
make a call to execute on the GPU which will complete without preemption then return control back to the CPU.
For instance, consider the example illustrated in
Figure 1. At
the processor executes for
at
makes a call to the GPU where it executes for
then at
completes and returns to the CPU where the task instance finishes at
. Notice that the CPU code waits for each GPU-related operation to complete. In effect, a gap is created within each task instance because the GPU instructions are executed on the coprocessor.
This example scenario highlights several of the challenges associated with scheduling real-time GPU-based applications. One is the processing gap created in the processor when the CPU task is waiting on the GPU task to finish. In this example, the processor task is idle 50% of the time, resulting in a decrease in the system’s overall schedulability. Another obstacle is the processors need to be allocated according to a predictable scheduling policy to ensure that task timing constraints are met. This is difficult because there is underlying complex proprietary software that is used to execute the GPU’s instructions, and that software is not designed for deterministic real-time processing.
To facilitate a real-time environment, one of the overall goals is to exploit those processing gaps to schedule other CPU-based tasks in order to improve the schedulability bound of the system. Another is to provide for more predictable behavior of the coprocessor by treating it as a special case of shared resource management in a multiprocessor system [
13,
14]. The final goal is to create a dynamic run-time environment that can adapt to changing processing requirements by re-allocating resources based upon the criticality or importance of a particular application.
3. Related Work
Authors in [
15] presented a case study that examined various optimizations, algorithms, and platforms for machine learning in resource-scarce embedded systems. Their paper presented guidelines and recommendations for techniques to be used when implementing machine learning applications on resource-scarce devices. Authors emphasize that by moving applications to the network’s edge devices, internet traffic is reduced, latency issues can be mitigated, network security improved, and real-time performance provided in the system. They acknowledge that in order for an end-device to meet strict real-time deadlines, the devices have to run either a bare-metal application or an RTOS instead of a GPOS. The reason is that an RTOS allows for the prioritization of tasks to meet deadlines where a standard GPOS cannot ensure the task’s timing constraints are met.
Other work in [
16] presented by researchers looked at making machine learning toolkits compatible with real-time systems, specifically general purpose embedded processors. Their work focused on porting Support Vector Machines (SVM) onto embedded processors across two communication networks. Their platforms consisted of an ARMv7 processor running Linux and a PPC440 processor running the Green Hills Integrity RTOS. The main effort of this work focused on optimizing runtime performance and the memory footprint of SVM libraries. Various runtime optimizations included removing doubles, disabling exceptions and in-lining functions. Other modifications included fixed-size vectors or caching dot product calculations. Their work mainly focused on application-level changes, with some minor changes made to the kernel by removing expensive function calls in the kernel. One particularly interesting finding mentioned by the authors in the paper was the discovery about how unpredictable the response times can be when presented with differing code and data structures.
Applying machine learning to embedded sensor systems was another approach investigated by researchers [
17] looking into integrating machine learning techniques for Internet-of-Things (IoT) based applications. The authors’ approach was to develop an efficient real-time realization of a Gaussian mixture model (GMM) for execution on an embedded sensor board. Their work presented real-time data analytics of sensor data with continuous training of the machine-learning platform. However, while real-time capabilities were advertised, there was no more mention of any specific timing constraints or consequences of missed deadlines. The implication was that the sensor data was processed as soon as it was received with minimal latency, which would not necessarily be classified as a real-time system.
The balance between hardware and software implementations of machine learning algorithms was examined by authors [
18] to demonstrate the possibilities of moving the critical sections of the machine learning algorithm into hardware in the form of an embedded SVM. Their overall goal was to optimize the SVM by moving code back and forth between the software and the hardware—notably an FPGA. The authors argued that processor size could be traded against performance to fit into other deployment scenarios, thus providing a type of static adaptability.
An empirical study was conducted by Ogden and Guo [
19] that analyzed the performance tradeoffs between on-device inference versus cloud-based inference for mobile applications. Their study concluded that on-device inference was suitable for certain tasks on newer mobile devices with specific architecture optimized hardware. They also demonstrated that unpredictable or varying network conditions could lead to poor cloud-based inference throughput or response times.
A real-time GPU scheduling framework, called GPUSync [
20,
21], was introduced to address GPU-based real-time scheduling issues, such as assigning tasks to a specific GPU, managing memory transactions, and scheduling the computations. As GPU allocation can be viewed as a scheduling problem for mutually exclusive resources, their approach was to implement a synchronization-based methodology. Due to the high overhead costs associated with preemption in the GPU and since multiple tasks may be sharing the GPU(s), it is reasonable to treat the coprocessor execution as a critical section of code in the CPU. In this way, existing real-time locking protocols [
21] can be applied to the GPU allocations, providing more determinism and predictability required by a real-time environment.
Authors in [
22] used machine learning to manage complex tasks in integrated circuit technologies. The tasks are managed by an operating system whose main role is defining resource allocation and temporal scheduling. The authors proposed a neural network-based model for the design of a scheduler for a heterogeneous multiprocessor. However, this approach requires a static approach where all tasks have to be defined apriori. Any change to the task set requires a new scheduler to be modeled and developed. Practically speaking, modifying a new scheduler in an operating system kernel every time the task set changes is non-trivial. For monolithic operating systems like Linux, it is nearly intractable.
For some of these reasons, our motivation was to create an approach that did not require systemic changes to the kernel but instead to run on top of a commercially available real-time operating system. We believe from our research that our approach was the first to implement a scheduling architecture for a heterogeneous multiprocessor with real-time guarantees.
5. Simulation Analysis Results
The performance analysis of the feedback-based real-time scheduling framework has been evaluated using a simulated set of tasks, similar to the same approach adopted by authors in [
33] who evaluated the performance of multiprocessor DSP scheduling. Comparison performance was based upon the static priority tasks used by traditional schedulers, where the priority of the task does not change versus dynamic priority tasks that can change during the lifetime of the task based upon environmental conditions. Other heterogeneous multicore schedulers presented by other researchers are not necessarily applicable because they are either static-based scheduler, where the task set must be identified apriori, or not specific to real-time scheduling.
Both periodic and aperiodic task sets were generated using random values with a uniform distribution. The number of periodic tasks were varied from 2 to 20. Cooperating tasks were generated to be 50% of the total number of periodic tasks. Aperiodic tasks were not modeled to use the coprocessor. The number of aperiodic tasks were varied from 1 to 5. Periodic task periods were generated from 5 to 100 while periodic server periods were varied from 10 to 100. Independent periodic task worst case execution times and cooperating worst case execution times were selected to create an overall utilization that varied from 0.35 to 0.90. The worst case execution time of cooperating tasks were generated to vary between 10% to 80% of the total task execution time . For our initial performance analysis, we modeled one processor and one coprocessor, with future work to include models consisting of multiple general purpose processors and special purpose coprocessors. The first experiment compared our adaptive feedback-based approach against the standard fixed priority scheduling algorithm in terms of overall utilization factor and task deadline misses.
The first experiment analyzed the standard fixed priority scheduling algorithm RM, the criticality of the task is listed to provide reference but was not considered for schedulability analysis.
Figure 4 depicts the results of a typical simulation run. System utilization represents the overall utilization recorded in the system. The Miss Rate (Low-Criticality) represents the overall average miss rate for tasks that are considered to be less critical. The Miss Rate (High-Criticality) represents the overall average miss rate for tasks considered to be highly critical. Notice from the figure that both task types are meeting all deadlines until utilization reaches around 70% which is the theoretical limit for RM scheduling. Then, as requested utilization begins to increase overall utilization begins to saturate at 100% and both task types start to increasingly miss deadlines. Note that both highly critical and lower criticality tasks are similar in miss rates. The reason is that fixed priority RM scheduling only considers the period of the task to assign priorities. The shorter the task period, the higher the priority. However, the importance of a task may not be proportional to how often that task runs, and some tasks may have a longer period but actually be more critical than a shorter period task.
Figure 5 illustrates the performance of our feedback-based scheduling framework as compared to the traditional fixed priority approach used in most embedded real-time applications. Notice in
Figure 5 that around 70% of utilization tasks start to miss deadlines similar to what happens with the example presented in
Figure 4. However, highly critical tasks do not start missing deadlines until around 95% total utilization while lower criticality tasks start missing deadlines at a higher rate than with fixed priority scheduling. This is due to the higher criticality tasks taking the bandwidth from the lower criticality tasks. Using our scheduling framework, we were able to effectively eliminate or limit the deadline miss rates for highly critical tasks. The next experiment analyzed how our feedback-based approach adapted to transient workload conditions. This is a case where the system is overloaded temporarily but eventually returns to a state where all tasks can be scheduled during nominal conditions. These types of transient events can occur because of hardware faults, unpredictable execution times or even software bugs. For this experiment, we modeled a sample representative task set, as described in
Table 1. Tasks
T1,
T2,
T3 and
T4 are considered higher criticality since those tasks simulate reading sensors or controller actuators which are tasks that typically require low latency and a high degree of determinism. Task
T5 is the simulated image processing task and considered to be a lower criticality task. Task
T6 represents an aperiodic task which is used to represent asynchronous activity, such as processing a network packet or handling keyboard input.
Similar to
Figure 4 and
Figure 5, tasks can meet all their deadlines as long as overall utilization does not exceed 70%. At hyper-period 15 (a hyper-period is defined as the amount of time required for all tasks in the set to execute at least once), we model a transient overload of a requested utilization around 80% which results in tasks starting to miss their deadlines. It is at this point where the feedback scheduler utilizes the bandwidth actuator to reallocate bandwidth to higher criticality tasks. This is represented in
Figure 6 where lower criticality task(s) are blocked from running in order to loan their bandwidth to the more critical tasks. Around hyper-period 21, utilization returns to a more nominal state where the bandwidth is restored to the lower criticality tasks. At hyper-period 42, another overload condition is modeled with a higher level of utilization. In this case, bandwidth approaches close to 95% which results in additional deadline miss rates because lower criticality task(s) are blocked in order to temporarily loan their bandwidth. However, it is important to note that after the feedback controller reaches a stable state, higher criticality tasks no longer miss their deadlines.
6. Implementation
For our experimental setup, we implemented FC-RTS on an embedded SoC platform. We chose the Raspberry Pi 3 Model B+ for its Broadcom BCM28370B0, Cortex-A53 64-bit SoC processor, which is a common platform for Internet-of-Things (IoT) applications such as sensor monitoring and actuation control. The primary motivation for selecting the Raspberry Pi was to demonstrate that a commercial off the shelf (COTS) processor, not intended to provide deterministic behavior, could be used in a real-time DL environment without having to make any hardware changes. Since our work is primarily focused on the operating system scheduler, rather than the precise hardware specification, the Raspberry Pi 3 is computationally sufficient for the work described here.
As the Raspberry Pi is based upon Raspian which is a Linux-based operating system, a more deterministic real-time operating system is required. WindRiver’s VxWorks 7.0 was selected because it is the de-facto industry standard operating system for real-time processing and WindRiver already provides a board support package (BSP) [
34] for the platform. The BSP is the software support infrastructure required to run a RTOS on the Raspberry Pi. A picture of the targeted development platform is provided in
Figure 7.
The native VxWorks scheduler can schedule tasks using either a preemptive priority- based or a round-robin scheduling policy. In VxWorks 6.x and greater, WindRiver introduced the concept of real-time processes (RTP) which more closely resemble processes in general purpose operating systems like Linux. Tasks in kernel mode or processes in RTP mode are scheduled in the same way. Processes are created with memory protection so kernel memory space, ISRs and direct hardware access are prohibited. Tasks that operate in kernel mode have full access to kernel resources and are not subject to the same limitations as processes in RTP mode.
We choose to implement our feedback-based scheduler in kernel mode because the overhead in RTPs is prohibitive and the scheduler needs access to the kernel resources for task management. Our scheduler was implemented on top of the native VxWorks scheduler as a type of extension or middleware that sits between the scheduler and the VxWorks native scheduler. The VxWorks RTOS provides functions to extend the capability so various kernel mechanisms can be customized to support feedback-based scheduling. For example, the scheduler can be extended with either a customized ready queue structure or to attach an interrupt handler that is executed at every clock tick.
The native VxWorks scheduler dispatches the highest priority task in the ready queue. Our approach utilizes the system called tickAnnounceHookAdd( ) that is invoked at every tick interrupt and called before the native scheduler accesses the ready queue to dispatch the highest priority task. The ready queue is then manipulated by resuming a task taskResume( ), suspending a task taskSuspend( ) or setting/changing priorities taskPrioritySet( ). The kernel’s tick counter is also utilized to read tickGet( ) and set tickSet( ) as a means to manage the notion of time when the tick interrupt ISR is invoked.
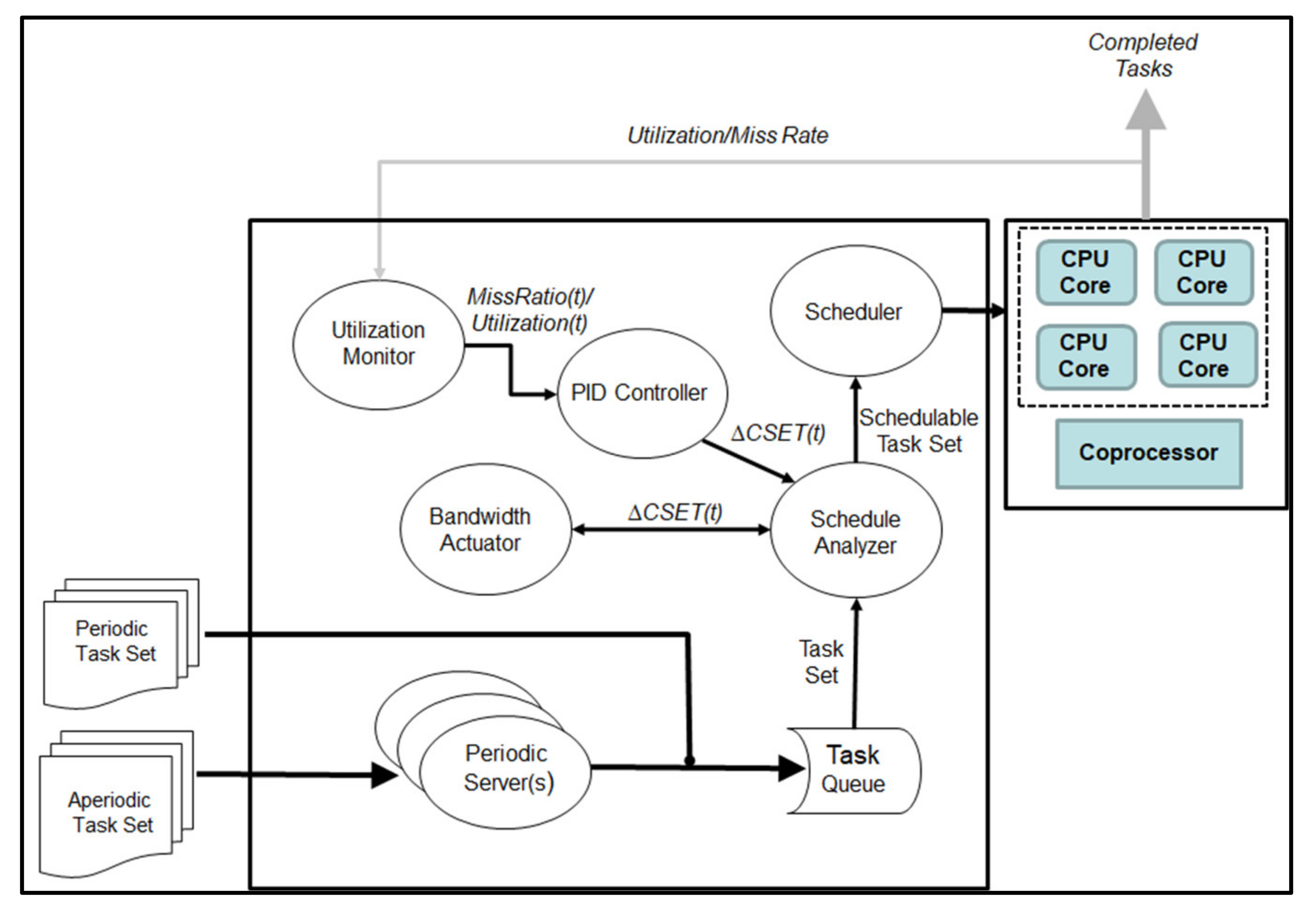
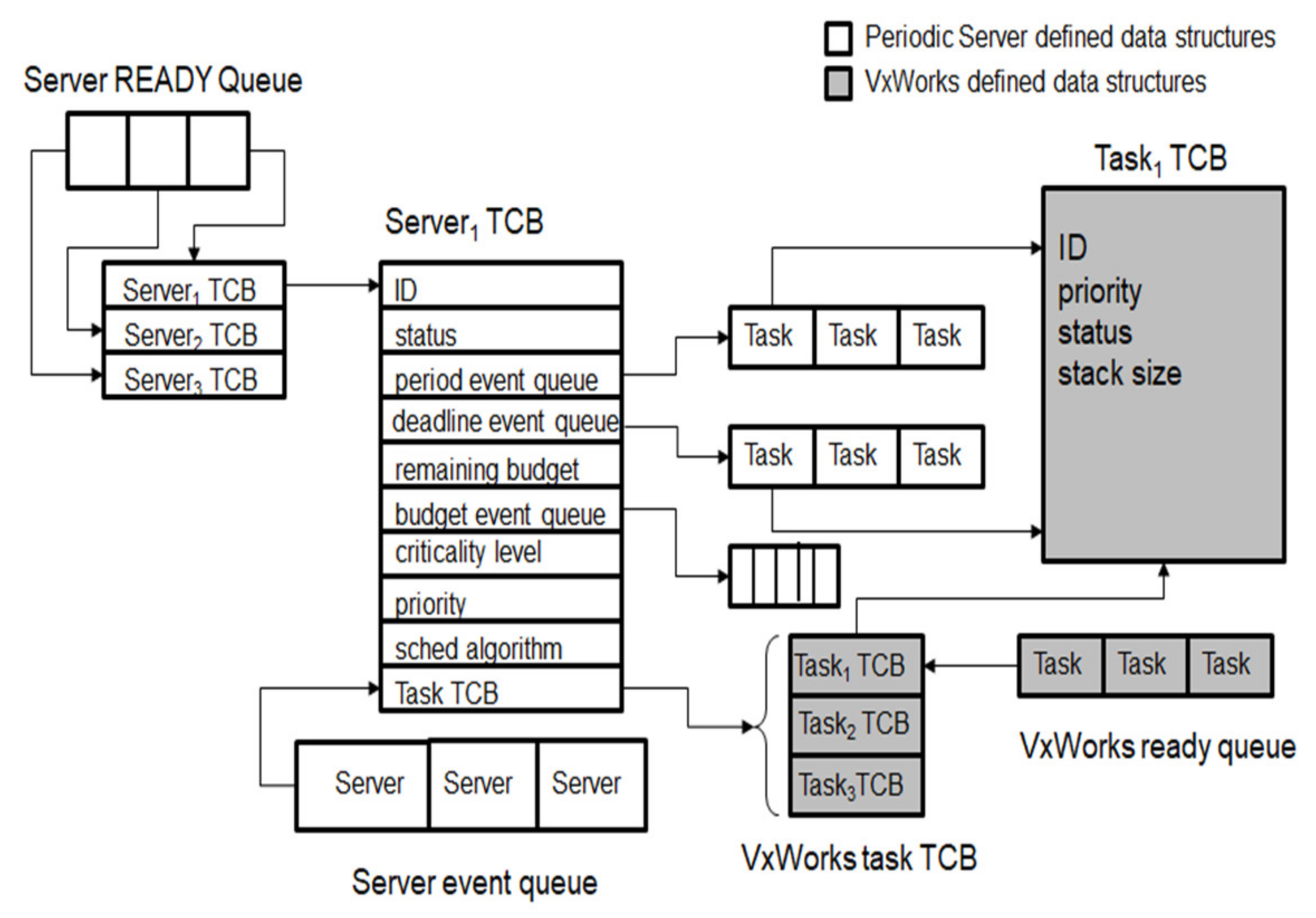
The primary function of FC-RTS is to arrange either the periodic tasks or aperiodic tasks (that are serviced by a periodic server) in the ready queue at every period start. They are arranged according to their priority or criticality level depending upon whether overall task utilization exceeds available bandwidth. In order to support aperiodic tasks, the notion of a periodic server needs to be implemented. The periodic server itself is a task in VxWorks with its own task control block (TCB) and task event queue.
Figure 8 illustrates the implementation of the required data structures needed to support a periodic server in VxWorks.
The TCBs needed to support periodic serving in VxWorks are described as:
period_event_queue—is a reference to the server’s event queue which contains the task period.
period—is the period of the server.
deadline_event_queue—is a reference to the server’s task queue which holds the task deadline.
budget—is the server defined budget.
remaining_budget—is the current remaining budget of the server.
priority—is the server’s priority.
criticality level—is the server’s indication of criticality during overload conditions.
Task_TCB—is a list to the VxWorks TCB task list. It references those task TCBs that are associated with the server
In order to assess the applicability of our feedback-based real-time scheduling framework, we modeled a representative workload based upon common components found in an edge IoT device. A task set was simulated to model the devices for the proposed development platform provided in
Figure 9.
Similar to the example task set provided in
Table 1, we created two periodic tasks to command a simulated L298N motor driver for independently controlling two motors. Another group of tasks were created to simulate the monitoring of a series of sensor nodes. An image processing task was used to exercise the GPU coprocessor by processing sample images using OpenCV which had been ported to run on VxWorks by WindRiver Labs [
35]. A couple other aperiodic tasks were created to simulate asynchronous events, such as network packet processing and keyboard processing. The purpose was to exercise the periodic server which manages the scheduling of the asynchronous tasks.
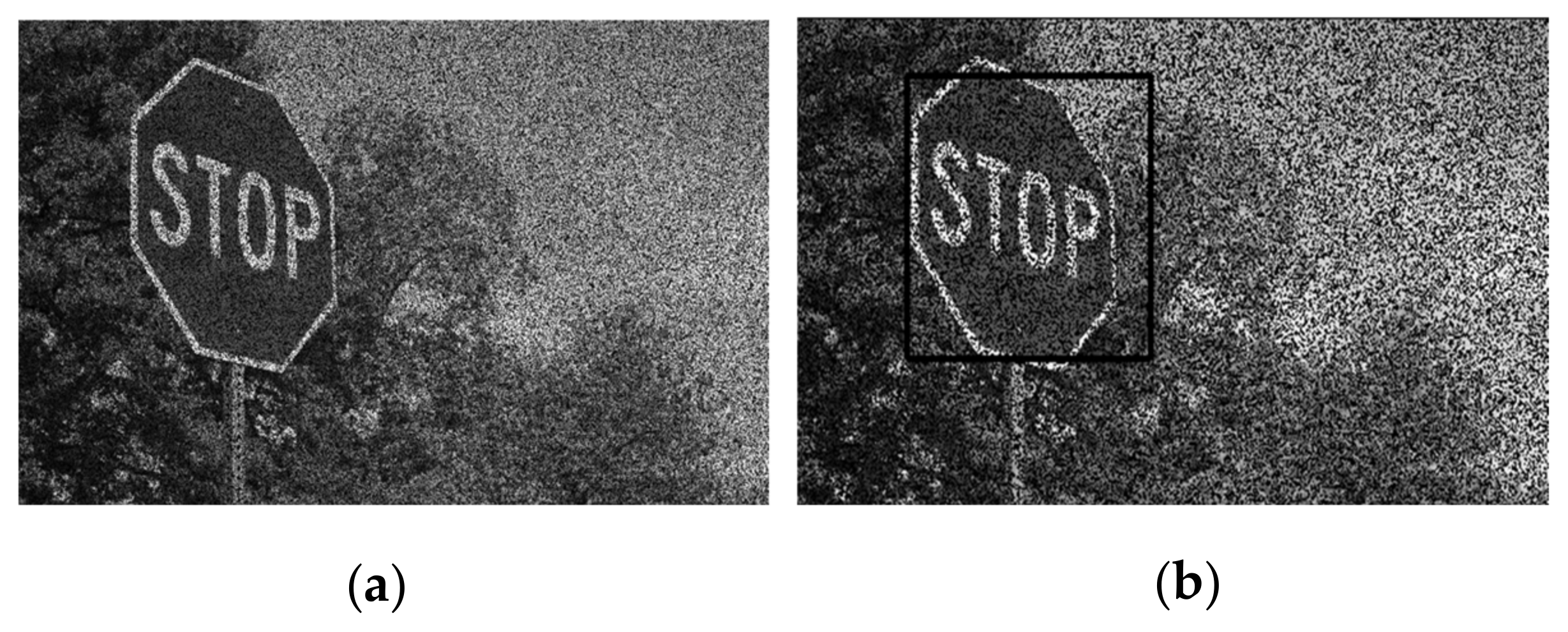
The actuator and sensor tasks were modeled with a simple spin loop that executed for the length of their respective WCET then blocked until the next invocation. The image processing task was created to perform simple object detection in two scenarios. One scenario was where the object could be detected without image enhancement (
Figure 10a,b) and the other scenario was to simulate a faulty sensor that generated a noisy image requiring filtering (
Figure 11a,b). The purpose was to model an average case processing scenario and a worst case processing scenario. For the aperiodic task, we created a periodic server to manage the simulation of the standard VxWorks console task to support the asynchronous events such as keyboard input or console output.
For the nominal and worst case scenarios we created the task set described in
Table 2. For the nominal case, we modeled the simulated tasks to randomly vary their execution times between BCET and ACET, which are the best case execution time and average case execution times respectively. The image task was not modeled but instead performed the actual image processing using OpenCV. The BCET and ACET of the image task were averaged based upon numerous timing runs recorded when the image was processed without noise (
Figure 10a). To determine
is critical in real-time systems, we analyzed the response times of the image process during 250 hyper-periods of the task set which is approximately 9 s. During the nominal case, system utilization ranged from
which produces a correct schedule based upon the formula [
36]:
where
. Refer to
Figure 12 and notice that even while the system is clearly not overloaded, Raspbian Linux experiences significant jitter in the response times on the image processing task, even exceeding the response time thresholds on multiple occasions which is one indication that deadlines are being missed. Now compare that with our framework FC-RTS running in VxWorks, where the response time jitter has much less variation and no thresholds are exceeded indicating that no deadlines were missed.
For the worst case scenario case, we modeled the simulated tasks to randomly vary their execution times between ACET and WCET. The WCET of the image task was averaged over numerous timing runs recorded when the image was processed with noise and therefore requiring the more computational expensive filtering operation (
Figure 11a). In this case, the utilization ranged from
which indicates an overloaded system. Notice in
Figure 13 that Raspbian Linux’s increasing jitter results in a significant number of deadlines being missed while VxWorks FC-RTS does a much better job of minimizing the jitter. While FC-RTS does indicate that some deadlines are being missed, that is to be expected since the image task is considered to be less critical, making it susceptible to having to forfeit its bandwidth during overload events.
7. Conclusions and Future Work
In this paper, we explored some of the initial challenges in moving deep learning applications to edge devices. We explicitly looked at three areas: the real-time deterministic requirements of proposed edge devices and the limitations of resource-constrained embedded devices, the inherent unpredictability of deep learning applications and platforms as well as the problem of scheduling a set of tasks in a heterogeneous multiprocessor platform while still maintaining some level of real-time guarantees.
To provide real-time processing, we incorporated the industry standard RTOS VxWorks and enhanced it to incorporate the notion of a periodic server for managing asynchronous events, a leading cause of unpredictable behavior in a real-time system. To account for limited resources and unpredictability, we utilized a feedback control-based architecture to monitor the system and dynamically adjust resources to only the most critical tasks. For the problem of multiprocessor heterogeneous scheduling, we adopted synchronization protocols to provide an upper bound on the blocking times for cooperating tasks that use the coprocessor, resulting in predictable schedules. Using task set simulations, we were able to demonstrate through schedulability analysis that FC-RTS effectively manages critical resources and can still provide a high level of service, even when the system is severely overloaded. We were also able to demonstrate the practicability of this approach by incorporating it into a commercial RTOS on a Raspberry Pi processor. We further illustrated the usefulness of FC-RTS by running an actual image processing task using OpenCV, a common deep-learning application.
For future work, we plan on incorporating multiple coprocessor architectures in our schedulability analysis instead of just a single coprocessor. This work will incorporate an FPGA-based approach using the Zynq UltraScale+ RFSoC ZCU216 evaluation boards to evaluate versus a COTS-based processor approach such as the Raspberry Pi. We will also explore the integration of chips designed specifically for machine learning, such as the Google Coral and Intel Myriad processing units. Given the successful deployment of our framework on the Raspberry Pi, we anticipate the results will generalize to these more computationally-powerful target architectures, as well as to different machine learning applications outside of computer vision. We also plan on implementing and analyzing other scheduling protocols, such as EDF, to compare how it performs against RM. Finally, we plan on evaluating FC-RTS with the fully populated hard platform depicted in
Figure 9 with actual hardware sensors and actuators instead of software-simulated ones.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}