1. Introduction
The theory of fractional calculus has been proposed for more than 300 years. However, at the beginning, most scholars only carried out the theoretical research. It was not until 1960 that there was a major breakthrough in its physical meaning and practical foundation. Among them, the Italian scholars Caputo and Mainardi studied the energy consumption problem based on the fractional derivative; Slovak scholar Podlubny proposed a fractional proportional-integral-derivative controller and its design method; French scholar Oustaloup’s research group proposed a fractional robust controller and successfully applied to suspension control in the automotive industry [
1,
2,
3,
4,
5,
6,
7].
In recent years, with the development of fractional calculus, it has become the best mathematical theory to describe problems such as complex motion, irregular phenomenon, memory effect, and intermediate process. Also, it has been gradually applied to various modeling and control fields, such as random diffusion and wave propagation, transmission line theory, macromolecular chain and biomaterials, viscoelastic modeling, fractional filtering, and fractional-order PID controller [
8,
9,
10,
11,
12].
As the research progressed, scholars discovered the fact that the actual external characteristics of capacitors and inductors have fractional-order characteristics. Dc-dc converters are widely used in transformation of electrical energy [
13]. Due to the use of capacitors and inductors in dc-dc converters, the study of fractional-order dc-dc converters is of necessity. Modeling is the groundwork for analysis and design of converters. Common modeling methods include state space averaging method [
14,
15] and equivalent small parameter method (ESPM) [
16,
17]; simulation models can also help to analyze the converters [
14,
15,
16,
17,
18]. The state space averaging method is employed to model the fractional-order Boost converter in continuous current mode (CCM) and discontinuous current mode (DCM) [
19,
20]. Literature [
21] uses the state space averaging method to construct the fractional model of the coupled inductance boost converter in CCM. Different fractional calculus definitions can be used in state space averaging modeling, such as the Caputo definition [
22,
23], the Rieman–Liouville definition [
24], the Grunwald–Letnikov definition [
25] and the Caputo–Fabrizio definition [
26]. Among them, the Caputo definition is the most widely used. The state space averaging method only considers the low frequency characteristics of the system and ignores the high frequency characteristics. Therefore, it cannot effectively analyze the high frequency harmonics caused by the nonlinear characteristics of the converter. The equivalent small parameter method has certain relative advantages. It considers the strong nonlinear characteristics of the system and combines the advantages of the harmonic balance method and the perturbation method to introduce approximate analytical solution expression of the state variable in steady state, which well reflects the amount of dc and harmonic components of the state variables and helps to design the controller. In [
17], the ESPM is used to establish the model of the fractional-order buck-boost converter in CCM and the results show high accuracy of the method. In [
27], ESPM is employed to analyze the transient of zero-current-switching (ZCS) PWM converter.
Cuk converter is able to step-up and step-down the voltage from the input and has been widely used in many fields [
28,
29,
30]. Among the basic dc-dc converters, the fractional-order Buck, Boost, and Buck-boost converters have been studied. However, the modeling method for fractional-order Cuk converter has been less reported. Literature [
29,
30] designs the fractional-order controller for Cuk converter, but the transfer function does not consider the fractional-order effect of the devices. To intensively study the fractional-order Cuk converter, it is necessary to investigate the modeling methods for Cuk converter.
In this article, several analytical and simulation modeling methods for fractional-order Cuk converter are studied and compared. State space averaging model is constructed in
Section 2. The ESPM is used to model the converter in
Section 3; the detailed process is provided. In
Section 4, numerical model and circuit model based on Oustaloup filtering principle are built. Simulation and hardware-in-the-loop experiment are conducted in
Section 5; comparisons of the modeling methods are made according to the simulation and experimental results, followed by the conclusion in
Section 6.
4. Numerical and Circuit Models for Cuk Converter
In this section, the numerical and circuit models for fractional-order Cuk converter are built. The state equation of the converter is
Laplace transform of (54) is
The model parameters are:
,
,
C = 100 μF,
R = 10 Ω,
f = 20 kHz. The numerical model (NM) built with Simulink is shown in
Figure 3.
There are many methods that can realize fractional-order component approximation, such as Newton iterative method, Oustaloup fractional reactance rational approximation method (also known as Oustaloup filtering principle), and Charef fractional reactance rational approximation method. In this paper, Oustaloup filtering principle is used to construct the fractional-order capacitor and inductor. In this paper, the inductance of and are set to 5 mH.
According to the method in [
32], the fractance chain of fractional-order inductor is constructed, as shown in
Figure 4.
The fractance chain of fractional-order capacitor is shown in
Figure 5.
The values of inductance and capacitance in three cases (different combinations of
α and
β) are shown in
Table 4,
Table 5 and
Table 6.
Then, the circuit model (CM) based on fractance chains are built, as shown in
Figure 6.
6. Conclusions
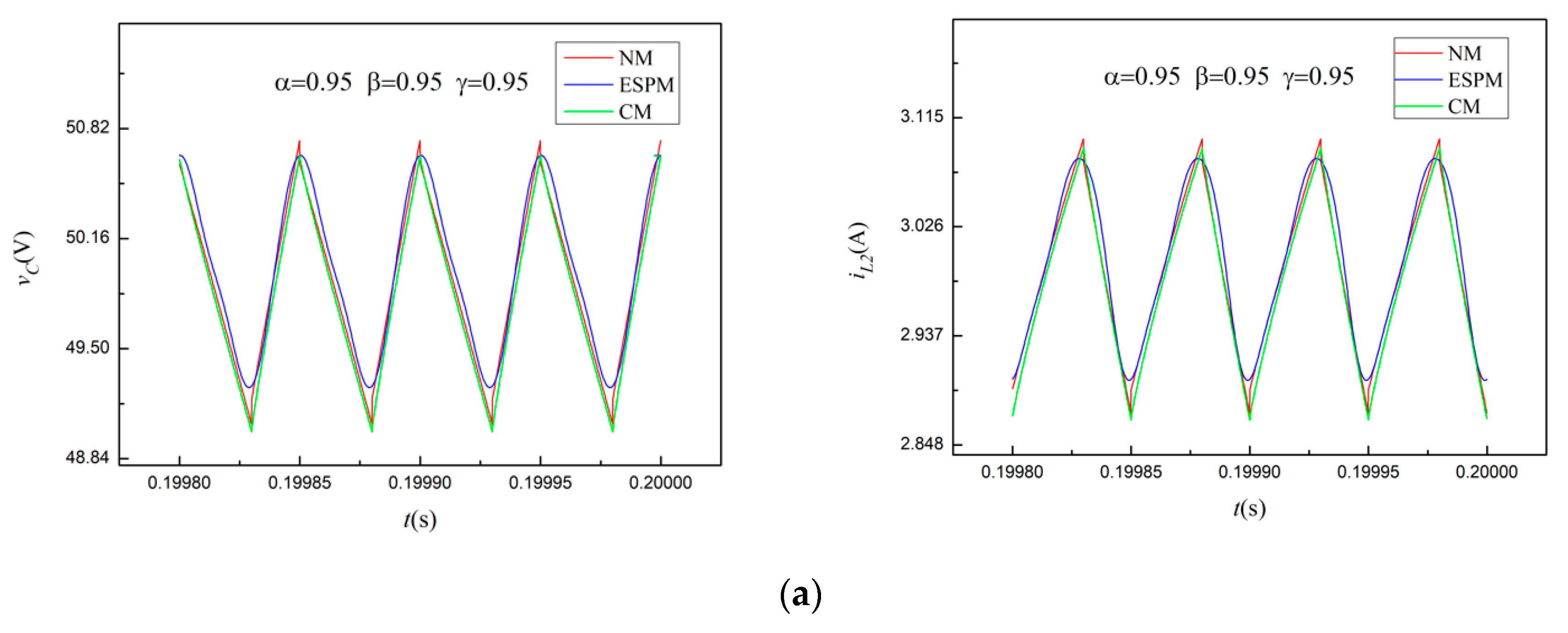
In this paper, the state space averaging method is used to analyze the fractional-order Cuk converter, and the expressions of the steady-state operating point and the current ripple of the inductors and are obtained. Then, the symbolic substitution method (equivalent small parameter method) is used to model the converter. Besides, the numerical model and the circuit model are also built to make comparisons. The simulation and HIL experiment are conducted. The paper draws the following conclusions:
(1) The current ripple expression of obtained by the state space averaging method shows that the ripple value is related to the input voltage , duty cycle , output resistance , inductance , switching period , and the inductor order , which is verified by simulation.
(2) Being different from the state space averaging method based on fractional calculus, the steady-state solutions of the fractional-order converter can be obtained by using the ESPM without considering the complex definition of fractional calculus. The simulation results of ESPM, NM, and CM are highly consistent. However, with the decrease of order, the relative errors of the ripple currents obtained from the ESPM model decrease most obviously, which make it suitable for modeling the Cuk converter with low orders. Moreover, the ESPM has the fastest simulation speed with flexibility and convenience of parameter adjustment.
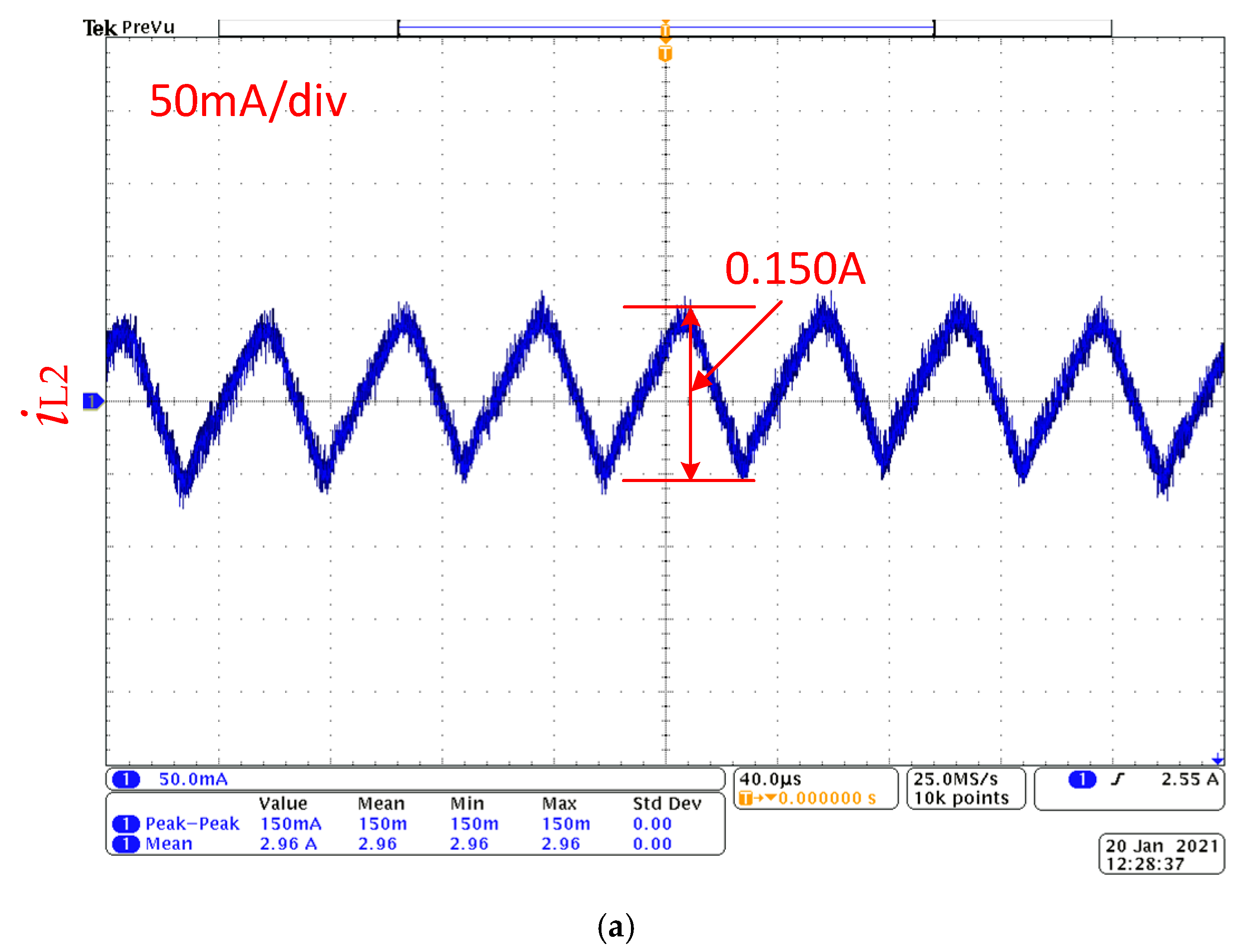
(3) The fractional-order Cuk converter based on circuit model is tested through hardware-in-the-loop experiment, which verifies the effectiveness of fractance chain construction based on Oustaloup filtering principle.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}