In this section, we focus on the pole feature extraction process of model approximation, and we then accurately analyze the optimization of the model parameters and the correction method of the initial poles.
2.1. Preprocessing of the ARMA Model Algorithm
The discrete scattered field of a static conductor target illuminated by transient electromagnetic waves can usually be expressed as [
15],
where
is the sampling interval, and
is the forced physical optical scattering field of the conductor related to the incident field. After the incident field has completely passed through the target, the physical optical field disappears, the time-varying field
becomes a constant independent of time, and the late response of the target commences. Additionally,
is the complex frequency of the target representing the overall attribute of the target, which is independent of the incident waveform, polarization, and target attitude angle [
15]. According to the time limitation of the early response and the causality of the late response, the discrete sequence in Equation (1) can be expressed as
where
is the unit step function,
represents the coordinates of the poles on the complex plane, and
is the starting- time of the late response of the target.
It can be observed in Equation (2) that the start time of the late response mainly depends on two factors: the projection distance of the target in the electromagnetic propagation direction and the pulse width of the incident excitation wave. However, owing to the shape of the target, the projection distance along the direction of the electromagnetic propagation changes with the attitude angle. At the same time, the filtering of the incident excitation pulse by the transmission antenna will make the forced physical optical scattering field and the late resonance overlap with each other, which inevitably leads to an error in the late response of the target. To solve the adverse effect of this error on pole extraction, this study used the ARMA model to approximate the entire scattering field of the target according to the viewpoint that the static or slow-moving conducting target in a transient electromagnetic field can be regarded as a linear time-invariant system with input. Because the actual excitation incident field is a short pulse signal with limited bandwidth and time width, it can only excite a finite number of main poles; thus, it can be described by the finite-order ARMA difference equation as follows,
where
N and
L are the orders of the AR and MA parts of the ARMA model,
is the sampling value of the target scattering field echo,
is the sampling value of the incident field, and
and
are the recursive coefficients of the ARMA model. The target transfer function corresponding to Equation (3) is
Thus, the poles of the target ; can be obtained from the zeros of the denominator polynomial in Equation (4), and the error in intercepting the late response of the target can be avoided by directly using the entire scattering echo response of the target. Among them, the accurate solution of model parameters about AR oder and MA oder is indispensable.
2.2. The Special Particle Swarm Optimization Algorithm (SPSO)
Most pole extraction algorithms based on the model have a significant dependence on the parameters. To reduce this parameter dependence and improve the estimation accuracy of the ARMA model, and overcome the shortcomings of the cumbersome calculation process and many restrictions of common ARMA modelling methods such as the moment estimation method and least square method, we use a special particle swarm optimization to optimize and estimate the model parameters, and the best parameters of the model are obtained through global search, based on this, the data model of echo scattering is established, and finally, the pole extraction of com-plex targets is completed.
First, the initial principle of the basic particle swarm optimization algorithm needs to be introduced. Particle swarm optimization is a parallel and efficient optimization algorithm based on swarm intelligence [
16]. Because of its memory characteristics, the particle swarm optimization algorithm enables particles to dynamically track the current search situation and adjust the search direction without operations such as crossover and mutation. It has the virtues of high precision, simple process and fast convergence in parameter optimization, and is very suitable for model optimization. The individual position of the particle in the solution space is updated by the particle by tracking the individual best position
and the group best position
, to realize the evolution of the candidate solution. The velocity of the
th particle is
. Its individual best position
is
, the group’s best position is .
In the next iteration, the particle updates its speed and position through
and
, and the update formula is as follows:
where,
,
;
;
is the current number of iterations;
is the current particle velocity in the
d-th dimension space;
and
are called learning factors, they are usually set to
. which are Non-negative constant;
and
are uniform random numbers in the interval
;
is the inertia weight.
The basic concept of opposition-based learning needs to be clearly understood. When the particle swarm optimization algorithm is initialized, the closer the randomly generated particles are to the optimal solution, the better the convergence of the algorithm. Due to the randomness of the initial particle population, it is impossible to predict the distance between the initial particle and the optimal solution, which often leads to an invalid search of the algorithm. The basic idea of opposition-based learning is that for a feasible solution of a particle, its inverse solution can be generated [
17]. Since the probability that the inverse solution approaches the global optimum is 50% more than the probability of a feasible solution. Therefore, if the solution spaces constructed by the feasible solution and the inverse solution are combined, the ability of particles to obtain the global optimal solution will be greatly improved when searching in the constructed solution space.
The inverse solution of each particle
is
, where
The individual extreme value corresponding to an ordinary particle
in the D-dimensional space is the elite particle, and the inverse solution of the elite particle is set as
where
;
is the generalization coefficient, so that the particle can obtain a better inverse solution.
Combining SPSO with ARMA model: To improve the convergence speed of standard PSO algorithm and avoid falling into local optimization, the inertia weight decreasing strategy is introduced into opposition-based learning of PSO, and this special particle swarm optimization algorithm is applied to the parameter’s optimization of AR order and MA order.
The inertia weight
represents the degree to which the current velocity of the particle is affected by the historical velocity. The formula for calculating
of a linear inertia weight decreasing strategy is as follows:
where
is the maximum value of inertia weight,
is the minimum value of inertia weight,
is the current number of iterations, and
is the maximum number of iterations. Under the influence of the change of the inertia weight
, the speed and searchability of the particle also change correspondingly: when the inertia weight
is large, the flying speed of the particle is also large, and the global search ability of the particle is better; When the inertia weight
decreases with the increase of the number of iterations, the flight speed of the particles also decreases accordingly, which is convenient for the rapid aggregation of the particle swarm, then, the local search ability of the particles is better.
In the ARMA model, the order of ARMA is determined by AIC (Akaike Information Criterion) The root mean square error
is selected as the fitness function of the SPSO-ARMA model, as shown in formula (10)
where,
is the actual value of the
-th sample,
is the predicted value of the
-th sample,
is the number of samples.
2.3. Calibrating Multidirectional Pole Positions
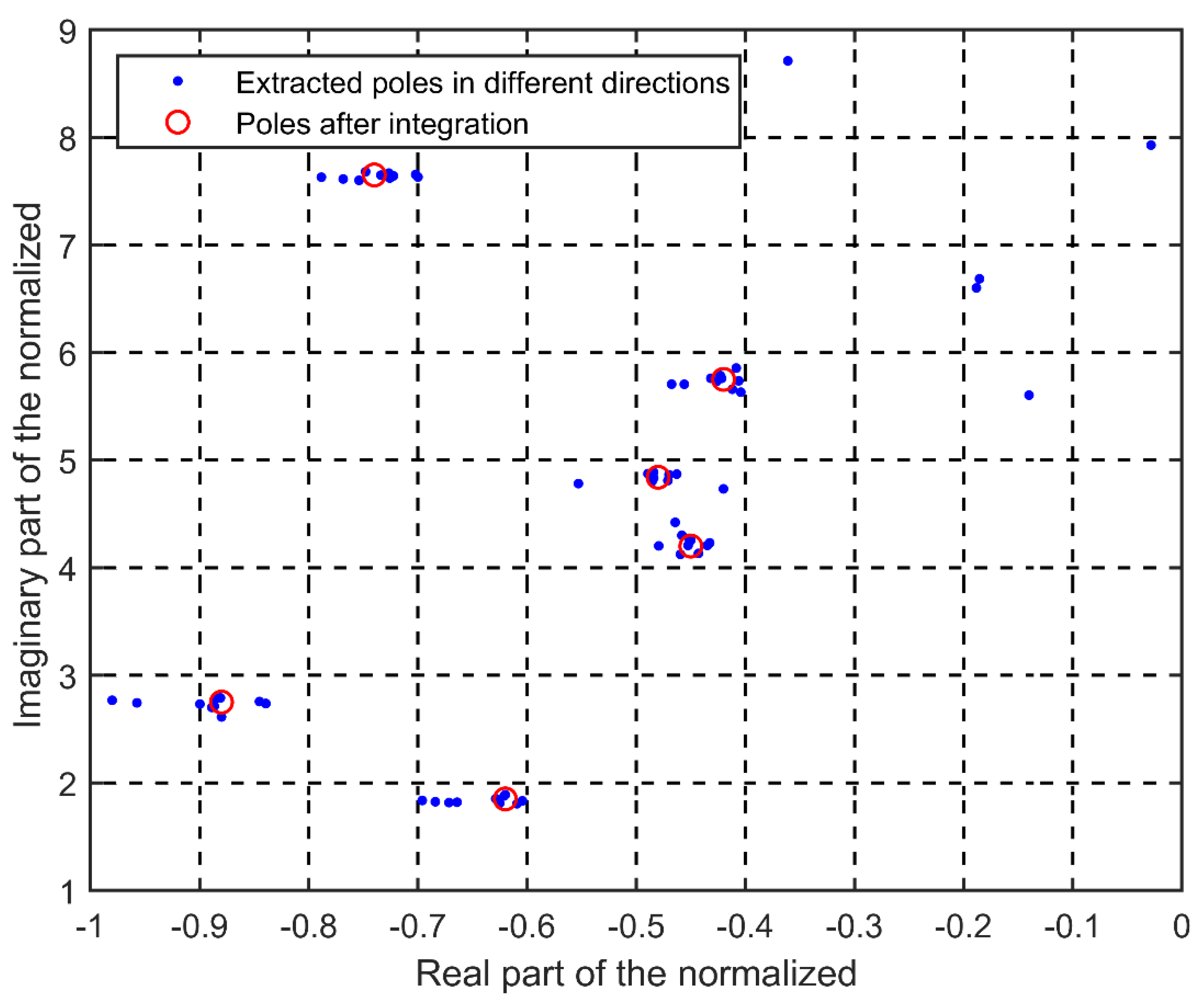
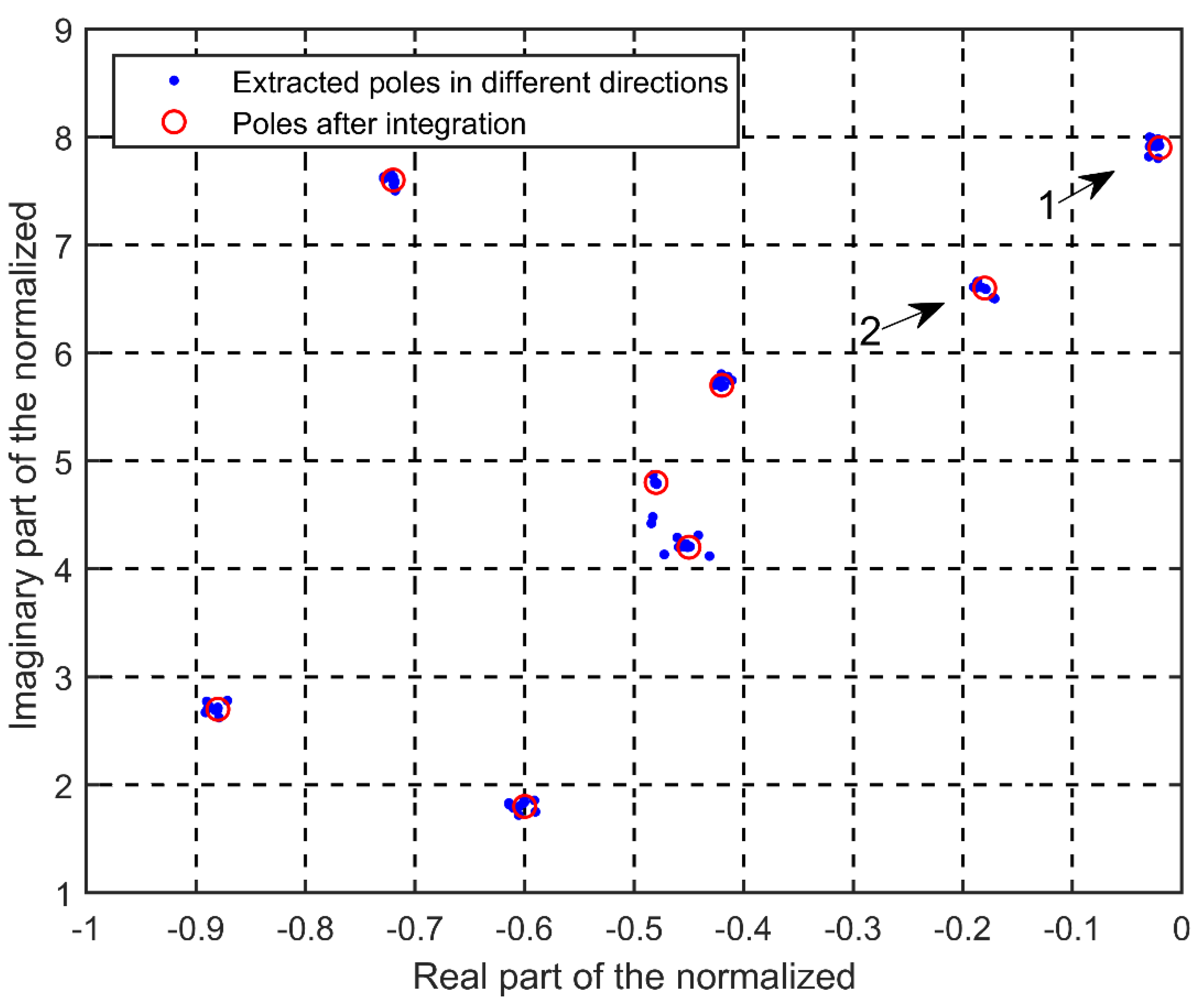
In the actual extraction process, it was found that the experimental extraction results of the poles at different azimuths had good consistency, but they were not identical. There is a significant difference, especially in the attenuation factors of some poles. To obtain poles with exactly the same azimuth, the extraction results need to be processed, and a set of poles is used to replace the pole results of all azimuths to ensure that the poles are completely independent of the azimuth. In this way, a multidirectional pole position adjustment method based on the sliding window function is proposed, which is used for transformation into a set of identical poles. At the same time, sporadic false poles distributed on the complex plane can be removed.
In the pole adjustment method, the poles of all azimuths distributed together in the complex plane can be assumed to be a single pole. Thus, a two-dimensional window function is constructed on the complex plane. When the counted poles falling in this window exceed a certain threshold, it is considered that real poles are falling in the window, and the position of the new pole is calculated. The window function is slid across the entire complex plane until it covers the region where poles may exist.
Considering the distribution characteristics of the poles at different azimuths in the second quadrant of the complex plane, a two-dimensional window function can be selected. The window length (
) is represented as the attenuation factor, and the width (
) is represented as the attenuation frequency. Because the maximum attenuation frequency cannot exceed the maximum frequency (
) that is achieved when calculating the scattering data, the minimum frequency is set to
. For the poles of the real target, the absolute value of the maximum attenuation factor does not typically exceed the maximum attenuation frequency [
18]. The minimum attenuation factor
was chosen, and the maximum attenuation factor
was zero. The values of
,
, and step length of the window movement must be designed according to the distribution of the poles. Because of the pole distribution characteristics of the ship targets, some empirical values can be obtained [
19].
,
, and the sliding step length was set as
and
. After setting all the parameters, the sliding window was used to search the complex plane. The search was conducted first along the direction of
, and then along the direction of
. If the number of poles in the window
exceeds the threshold
, the window function value
corresponding to the position of the poles in the window needs to be calculated.
is calculated as the new pole position, where I is the pole number in the window. The above process was repeated until the entire complex plane area with possible poles was searched.
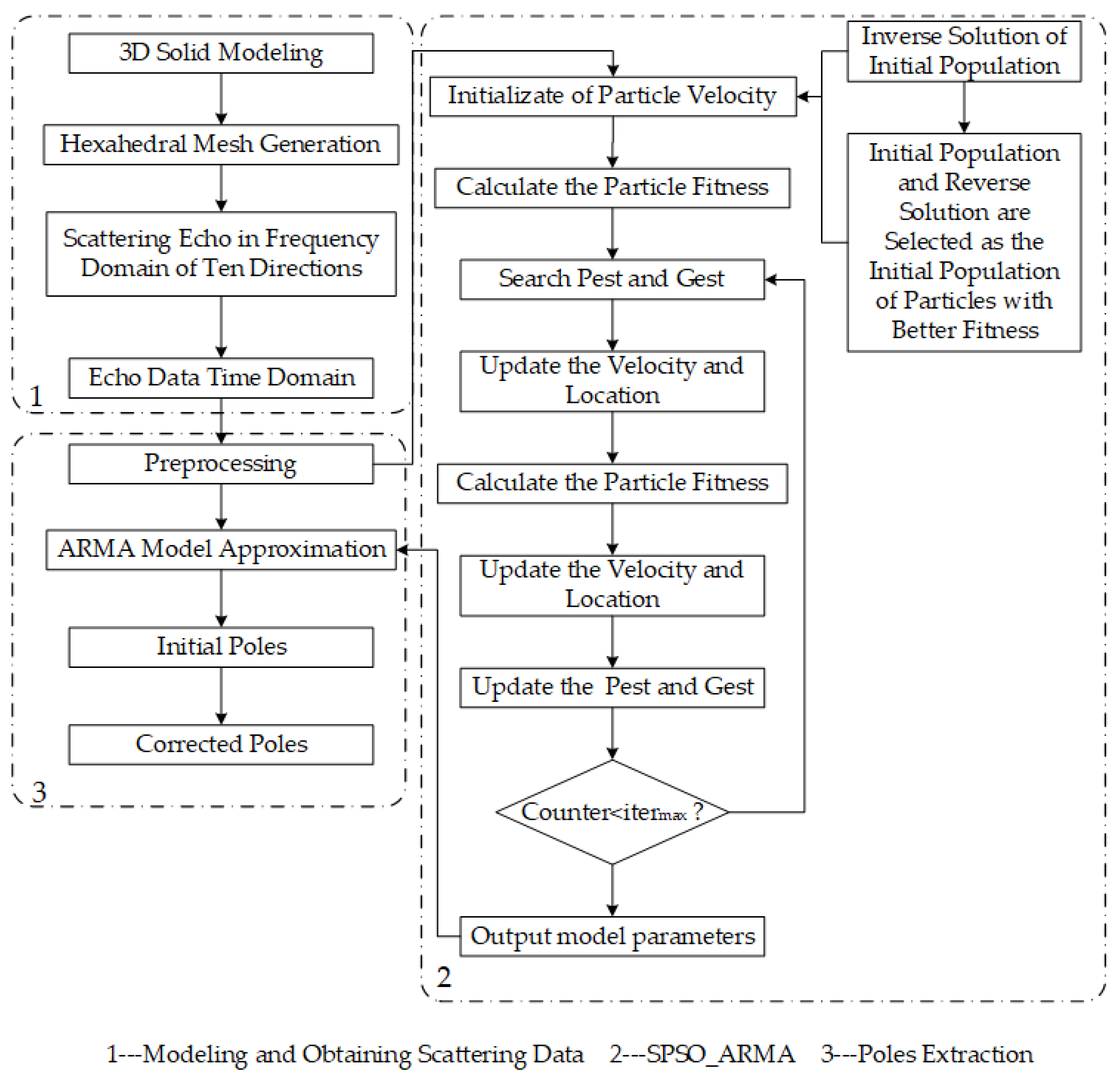
The main steps of the whole extraction process are shown in
Figure 1.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}