1. Introduction
Online monitoring of rotating machinery equipment status has become critical in intelligent manufacturing. The mechanical structure has become more complicated and extensive as science and technology progress, and the operating environment is harsh. When rotating machinery fails, it causes a production shutdown or a safety accident [
1]. As a result, it is critical to extract valuable information from massive historical data. As a result, the health status assessment of the current working condition of the equipment can be carried out effectively.
Nonetheless, real-time monitoring and fault diagnosis are underway, posing significant challenges to data transmission, network bandwidth, and data storage. The generation of a large amount of redundant data will result in the waste of resources. Data compression and intelligent fault diagnosis have evolved into research hotspots, offering practical solutions to the abovementioned problems [
2,
3]. Data compression technology, for example, has been widely used in image and video processing, with numerous research results [
4,
5].
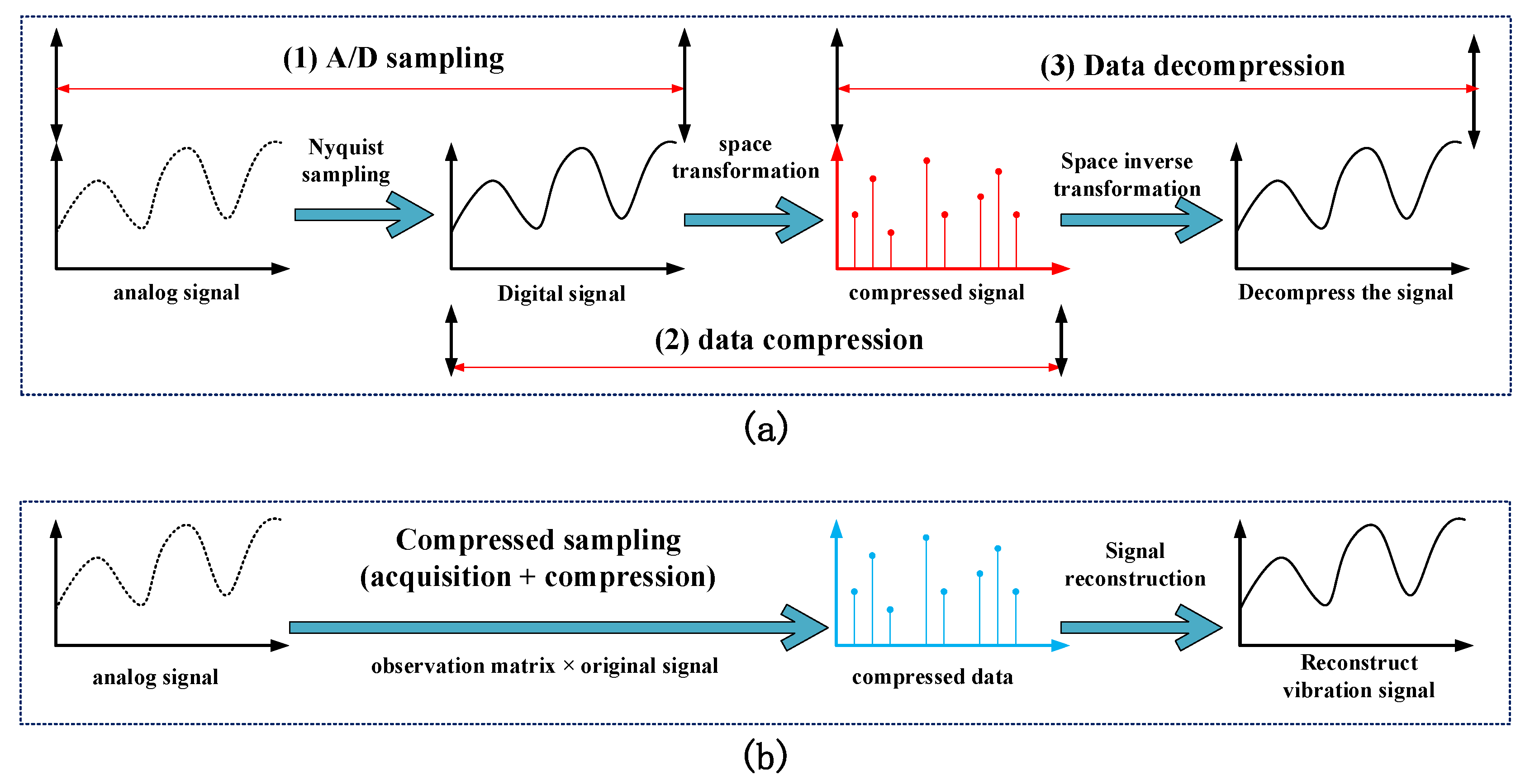
In recent years, conventional fault diagnosis has been divided into data collection, vibration signal characteristic parameter extraction, and fault classification. It includes a variety of fault diagnosis implementation methods. The equipment vibration signal collection is realized using the Nyquist sampling theorem [
6]. There are primarily two techniques for extracting feature parameters in the time and frequency domains [
7,
8]. Statistical and model methods are used in time-domain plans [
9], while envelope analysis and cepstral analysis are used in frequency domain plans [
10,
11]. Following the extraction of feature parameters, the following fault diagnosis models are used: K-nearest neighbor classification [
12], random forest [
13], and support vector machine [
14]. Although traditional fault diagnosis technology has produced notable results when rotating machinery is considered [
15,
16], the following limitations remain:
When the vibration signal acquisition process is run, many redundant observations are generated, which is incompatible with wireless transmission and data storage. As a result, advanced sensing technology must be used to compress and rebuild the original signal;
The vibration signal is nonstationary, and the extracted characteristic parameters include random noise. As a result, it is sufficient to use noise reduction technology to preprocess the signal before extracting the characteristic parameters from the weak signal;
The extracted time domain and frequency domain feature parameters rely on expert, prior knowledge. When the feature parameters are incorrectly set, the precision of the fault diagnosis outcomes suffers;
The traditional fault classification model belongs to the shallow learning classification model, which cannot deal with the problem of learning from complicated nonlinear relations when diagnosing faults [
17,
18].
This article focuses primarily on vibration signal compression and reconstruction, feature parameter extraction, and the development of a deep network structure model.
Compressed sensing technology has solved the problems of wireless data transmission and storage in recent years. Still, it has also played an essential role in the fault diagnosis of rotating machinery. Compressed sensing technology can significantly reduce the processing time of massive data and improve fault diagnosis efficiency, allowing for real-time online fault diagnosis of equipment. As a result, the equipment’s safety and stability are effectively improved, and the risks and economic losses caused by equipment failures are avoided. It is now gradually becoming a research hotspot in this field.
Xing et al. [
19] proposed using multimodal recombination methods to compress and reconstruct data. To diagnose fault detection, they advocate for the use of the least-squares planning algorithm. Shi et al. [
20] proposed a sparse autoencoder and compressed sensing technique. The wavelet packet’s energy entropy reduces feature dimensionality, and the general sparse autoencoder is used for classification. Shao et al. [
21] proposed a diagnosis method that combines an advanced convolutional deep belief network with the sense of compression. The moving average process of finger data improves the model’s generalization capability. Shi et al. [
22] directly extracted characteristic fault parameters from compressed data using compressed sensing technology.
Deep learning (DL) has gradually grown into an efficient method to solve the problems’ conventional fault-diagnosing approaches face as artificial intelligence develops rapidly. It also has the powerful ability to automatically extract valuable feature parameters, allowing it to avoid reliance on noise reduction technology and expert knowledge effectively. Deep learning techniques that are commonly used include Convolutional Neural Network (CNN) [
23], Deep Belief Network (DBN) [
24], and Long Short-term Memory Network (LSTM) [
25]. They first used CNN in research to process images and recognize speeches. Many researchers have applied CNN technology to fault diagnosis [
26,
27,
28], which has proven to be a popular research topic. He et al. [
29] proposed a 1D-CNN deep transfer learning approach, Adopt Adam optimizer, to improve fault diagnosis precision. Xu and colleagues [
30] propose a fault diagnosis method that combines CNN and the deep forest (gcForest) model, significantly improving fault diagnosis accuracy. Xin et al. [
31] proposed a multiobjective deep convolutional neural network diagnosis method that uses data about time, frequency, and time–frequency as input conditions to detect faults. Zhao et al. [
32] proposed a convolutional neural network (CNN) diagnosis method that combines batch normalization and finger data moving average. When different settings are assumed, this method has an excellent diagnostic effect. However, deep learning has achieved remarkable results in fault diagnosis in the studies mentioned above. However, processing large amounts of data in practical engineering applications and consuming computing resources are still required. Because of the harsh working environment, vibration signals containing many noise signals are produced, significantly increasing the difficulty of using one-dimensional signals for diagnosis.
Intelligent monitoring and equipment health assessments have entered the significant data phase, and higher demands have been proposed. Data compression is critical because it reduces storage requirements while also lowering network bandwidth requirements. This manuscript offers a method for diagnosing faults that combines sense compression and transfer learning. This method compresses and reconstructs the collected original vibration signal; the compressed signal is then transformed into an image represented by a time–frequency by continuous wavelet transform; and finally, an efficient deep transfer learning model is built. As the migration target, a pretrained AlexNet network model is selected. In addition, the new fully connected layer parameters are randomly initialized and retrained. The experiment results indicated that the model could extract robust features and classify faults.
This paper’s main contributions are as follows:
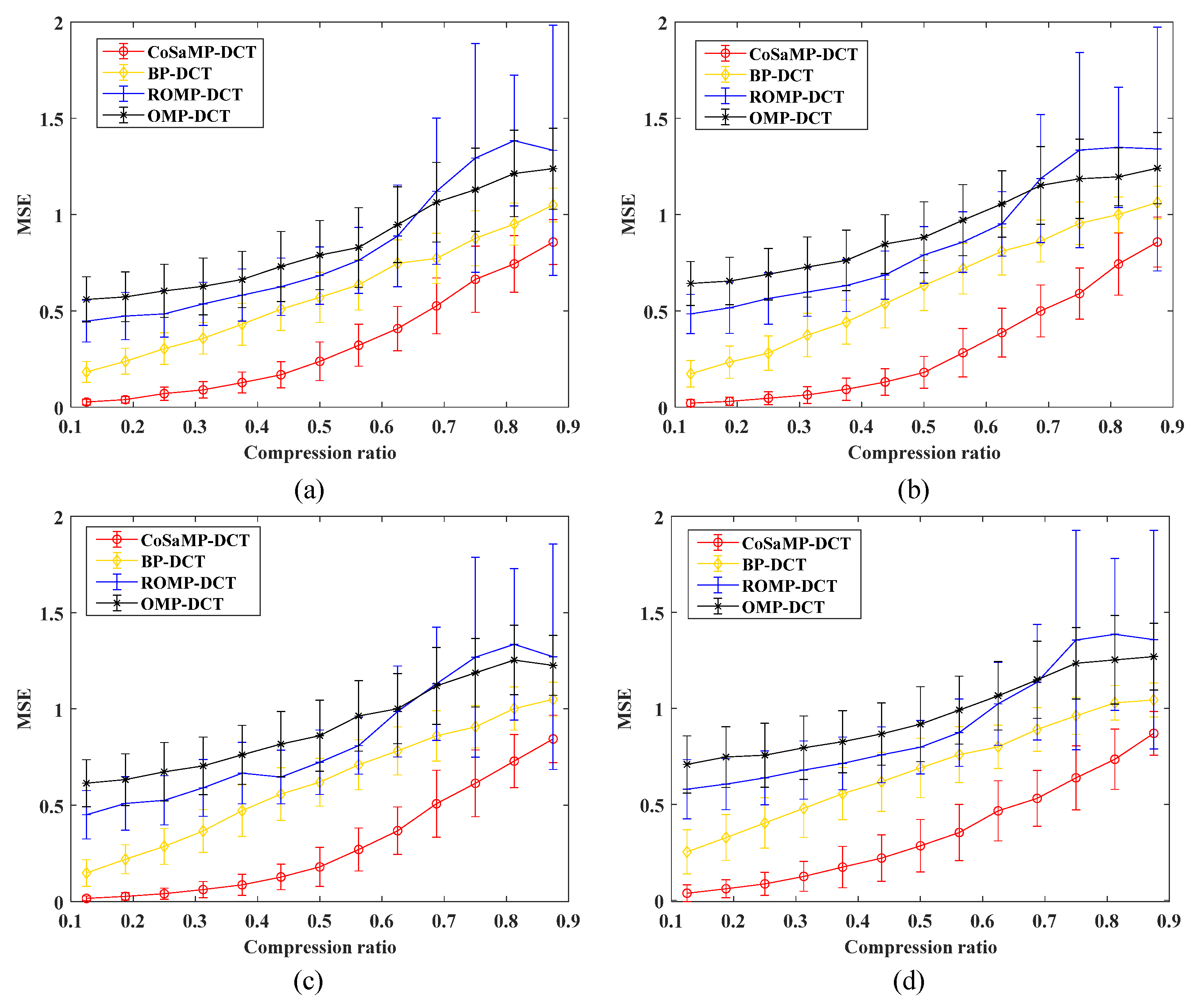
Using the Compressive Sampling Orthogonal Matching Pursuit algorithm, the optimal global solution is gradually approximated by finding the optimal local solution in each iteration. The most relevant one is seen from the absolute value of the inner product: the residuals. Compared with other traditional compression algorithm methods, this method can effectively improve data network transmission’s work efficiency and show a better compression effect and reconstruction accuracy.
A fault diagnosis method is proposed based on the combination of compressed sensing technology and transfer learning. Compared with other deep understanding and traditional machine learning methods, under a high compression rate, this method has the advantages of a simple network model structure, strong fault–feature extraction ability, high classification accuracy, small calculation amount, and short running time. In addition, the method has good portability and can be applied to embedded systems based on edge computing.
The remainder of this manuscript is arranged as the following: Part 2 introduces the basic theory of continuous wavelet transform and compressive sampling orthogonal matching pursuit algorithm. Part 3 presents the structure principle of deep convolutional neural networks and the description and analysis of transfer learning. Part 4 describes the process of fault diagnosis based on compressed sensing and deep transfer learning. Part 5 verifies the proposed method through experiments and analyzes the experimental results, and the final part, Part 6, presents the conclusions.
4. Process of Fault Diagnosis Method Based on Deep Transfer Learning and Compressed Sensing
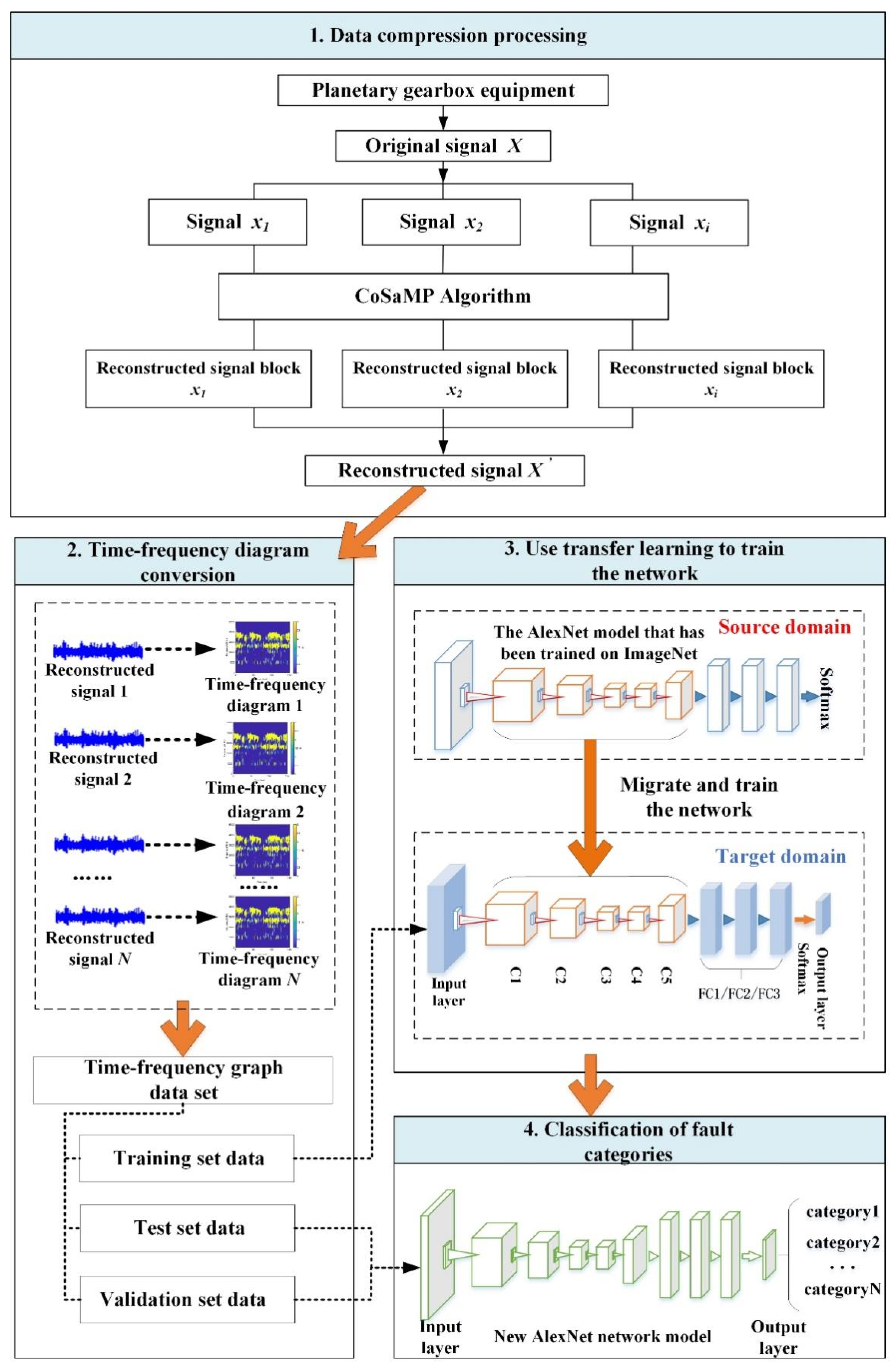
The framework flow of diagnosing faults utilizing deep transfer learning and compressed sensing is shown in
Figure 4. The framework of the method mainly includes: data collection, data compression and reconstruction, time–frequency graph conversion, and the use of transfer learning to train the network, etc.
The specific implementation stages are presented as the following:
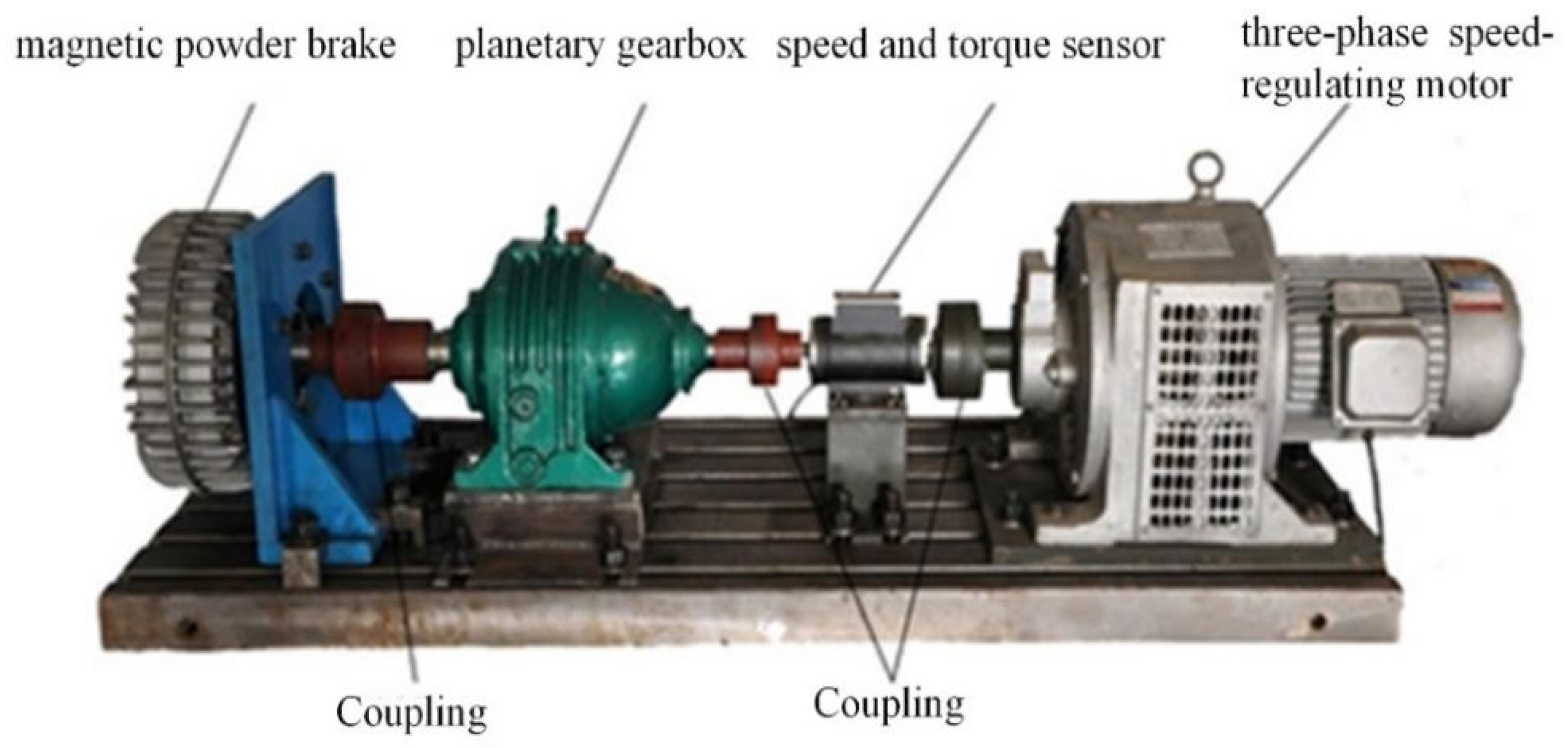
Step 1: Data collection. The vibration sensor is used to attain the original vibration signal x of the planetary gearbox.
Step 2: Data compression. The collected raw vibration signal x will be divided into xi signal blocks. Optimizing the dictionary Ψ by DCT to map signals into sparse transforms and the original signal x = Ψθ can obtain the sparse transformation signal θ. Sensing matrix A = ΦΨ (that is, observation matrix × sparse matrix) compresses the sparse signal data, and obtains the data compressed signal observation value y = Aθ.
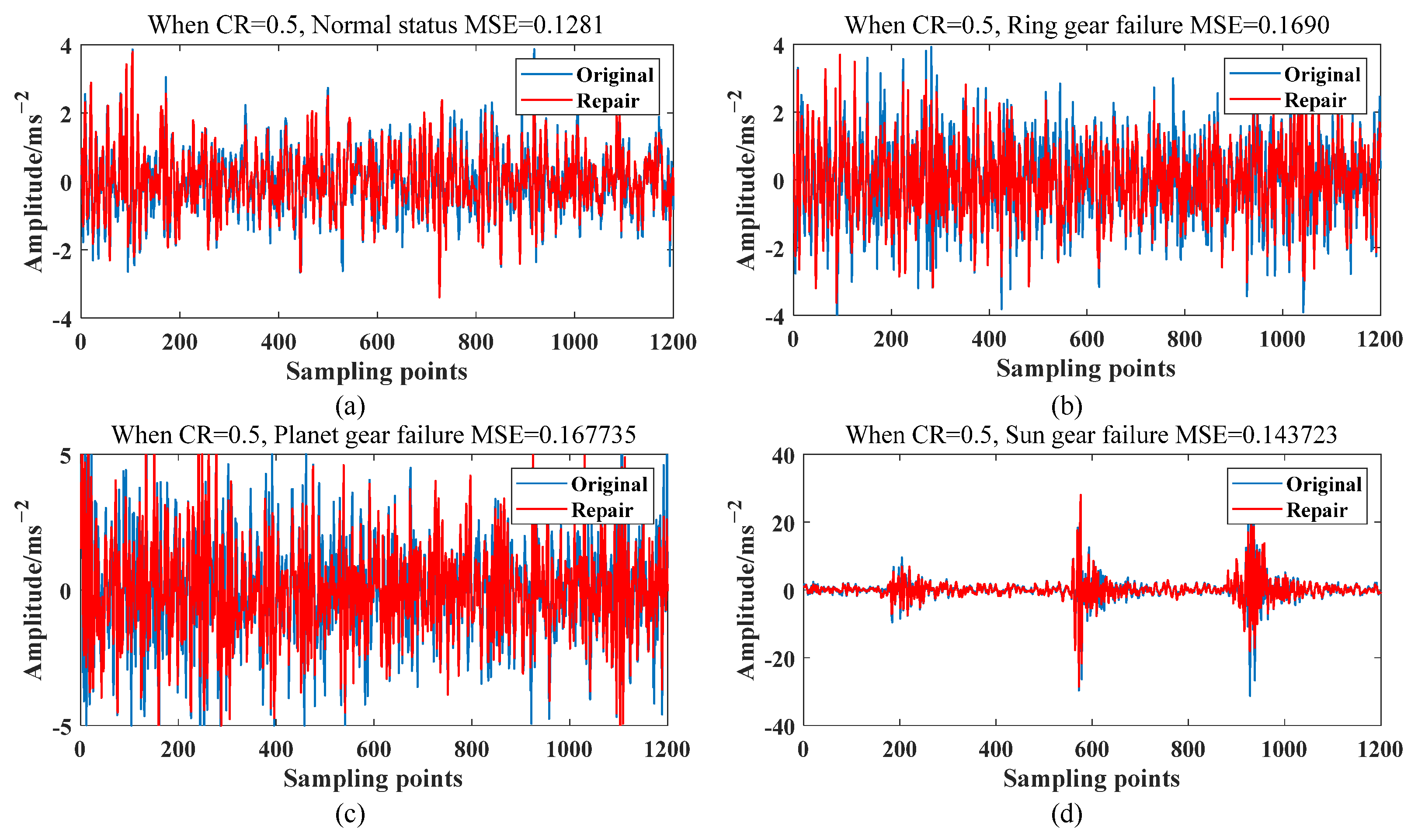
Step 3: Signal reconstruction. Using the CoSaMP Reconstruction Algorithm, using the sensor matrix A1,..., Ai and compressed signal y1,...,yi to reconstruct, obtain the restored sparse signal θ1,…, θi. At the same time, perform an inverse sparse transformation to obtain reconstructed signal blocks x1,...,xi, and connect the reconstructed signal blocks one by one, and finally form a complete reconstructed signal x′.
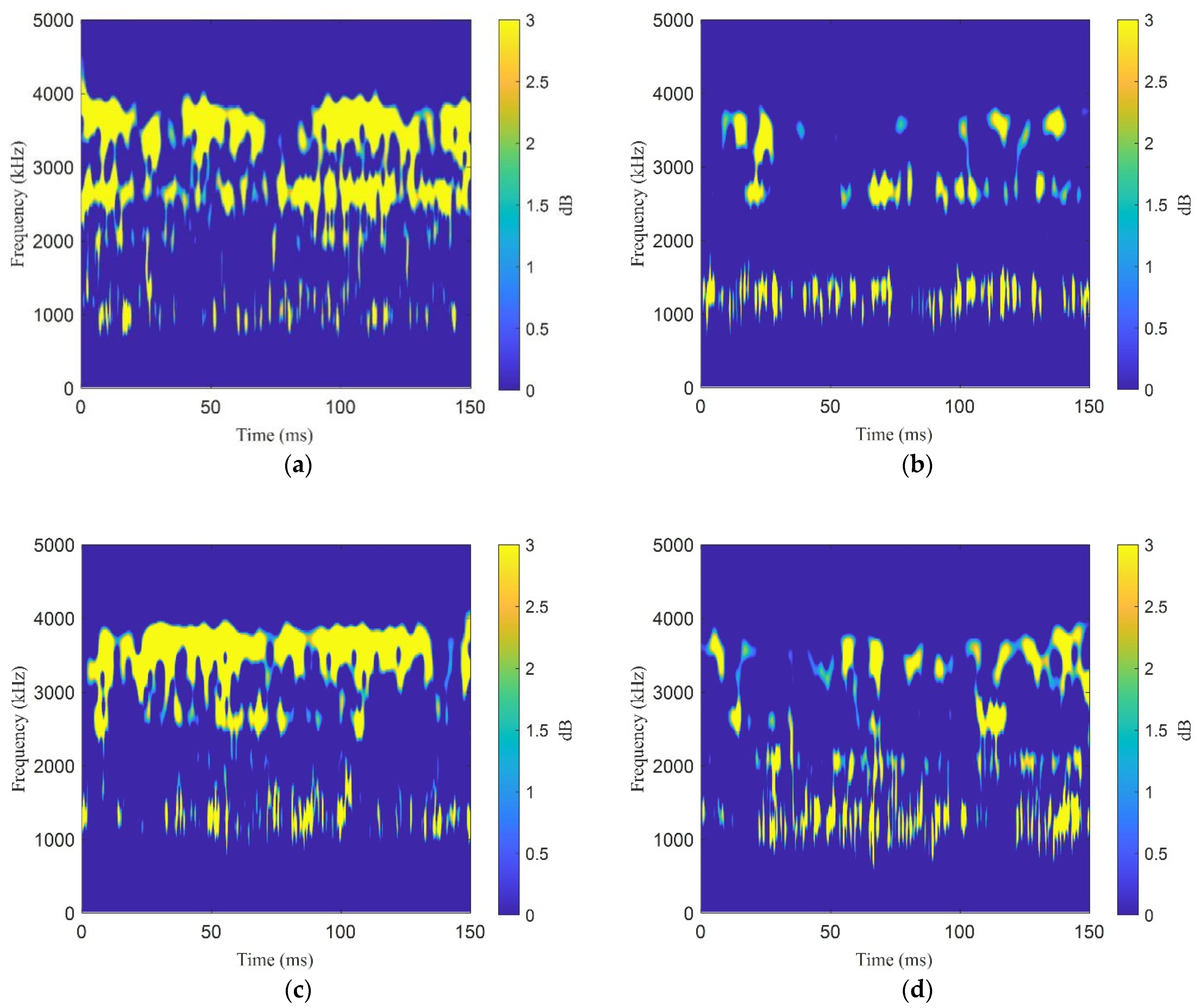
Step 4: Time–frequency diagram conversion. Perform continuous wavelet transform on the reconstructed signal to obtain a time–frequency graph data set, and divide the dataset into three sections: training, test, and validation sets.
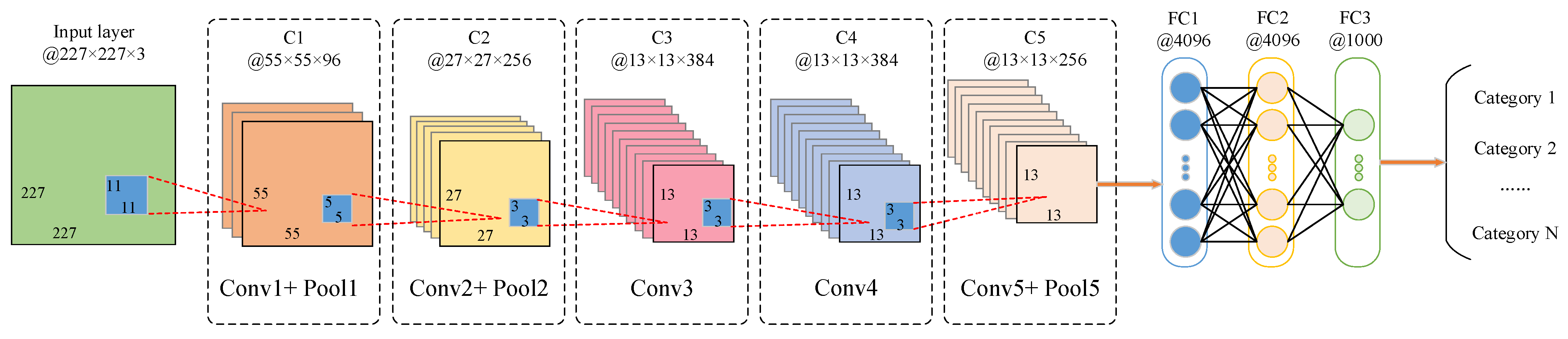
Step 5: Transfer learning. Use the pretrained AlexNet network model parameters of the source domain as the migration object. Using model fine-tuning, import the training set data, and retrain the fine-tuned model to obtain the deep transfer learning AlexNet network model.
Step 6: Classification of fault categories. Import the test set and verification set data into the trained deep transfer learning AlexNet network model and output the outcomes of the fault diagnosis.
6. Conclusions
This paper proposes a method for diagnosing faults using transfer learning and compressed sensing theory, which combines the continuous wavelet transform and the AlexNet convolutional neural network. The following are the main conclusions:
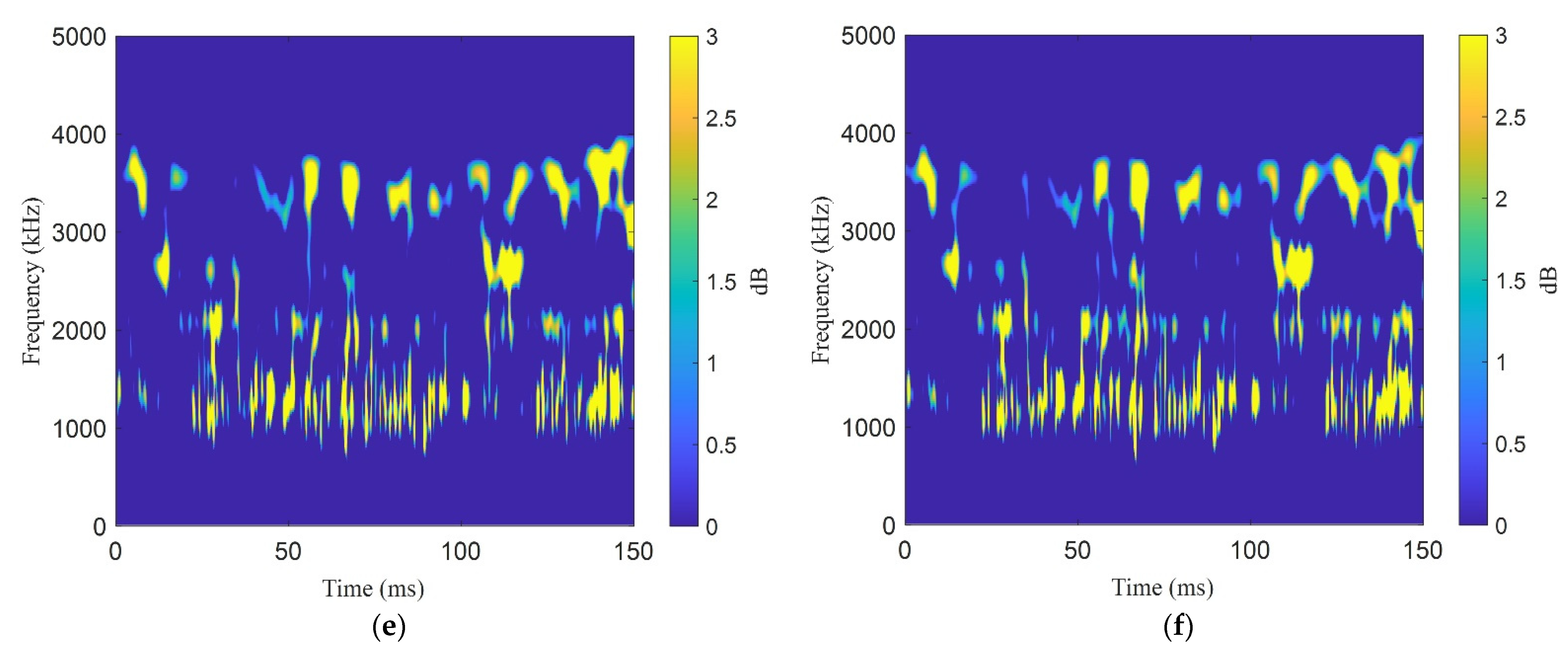
The original vibration signal is compressed and reconstructed using the CoSaMP reconstruction algorithm, and the experiment shows that a good compression effect is obtained. The continuous wavelet transform is used to convert the compressed signal into a time–frequency graph, reducing feature extraction complexity.
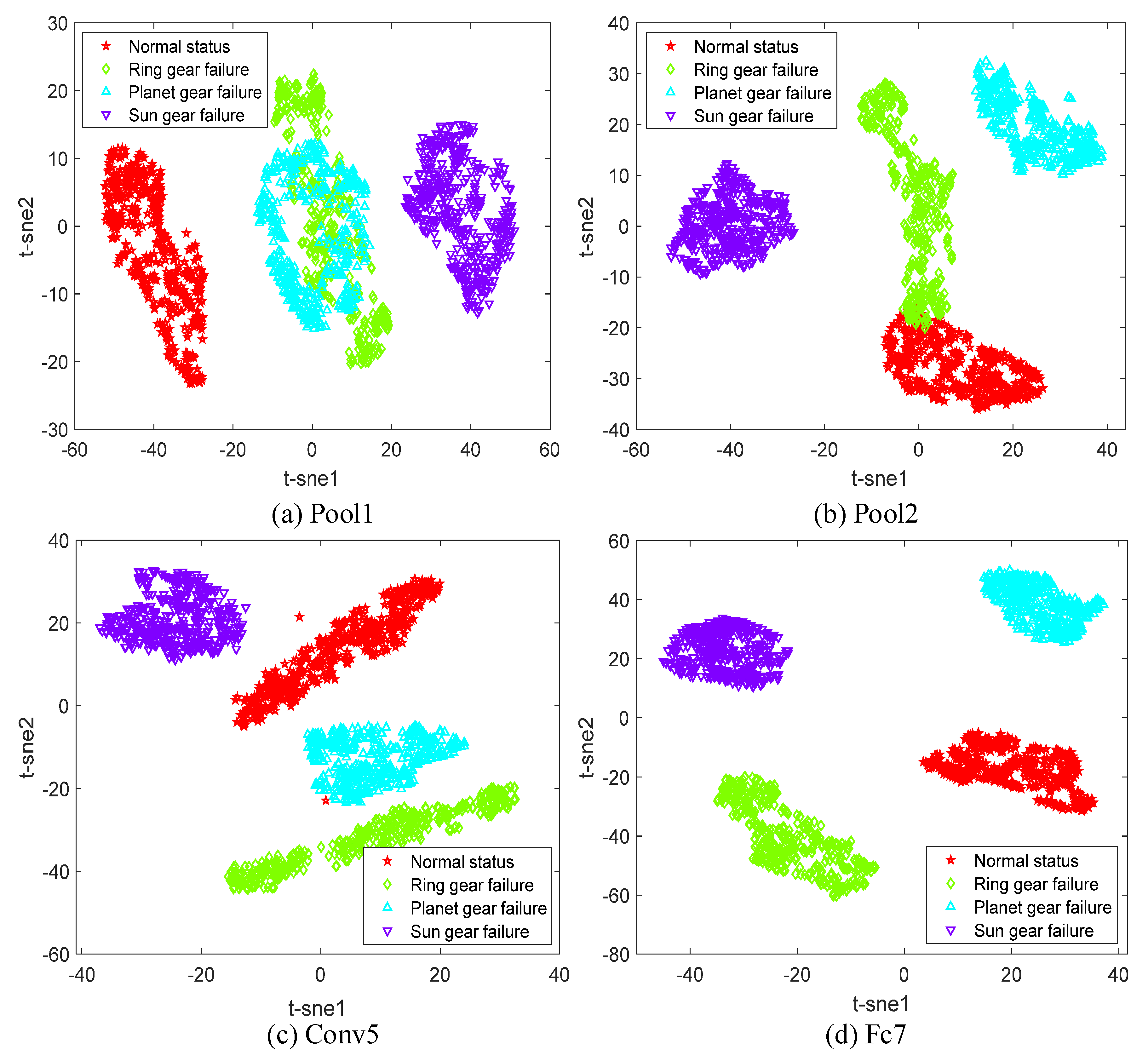
A deep migration learning model for planetary gearbox fault detection was developed. Five convolutional layers from a pretrained AlexNet network model as the migration target was selected. The model has robust feature extraction and fault classification capabilities. The fault diagnosis accuracy rate reaches 97.78 percent when the compression ratio CR = 0.5. The deep transfer learning AlexNet network model outperforms the SqueezeNet, ResNet−18, and GoogLeNet network models regarding classification accuracy and robustness. A specific reference value is provided to diagnose faults in rotating machinery and has a promising future application.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}