1. Introduction
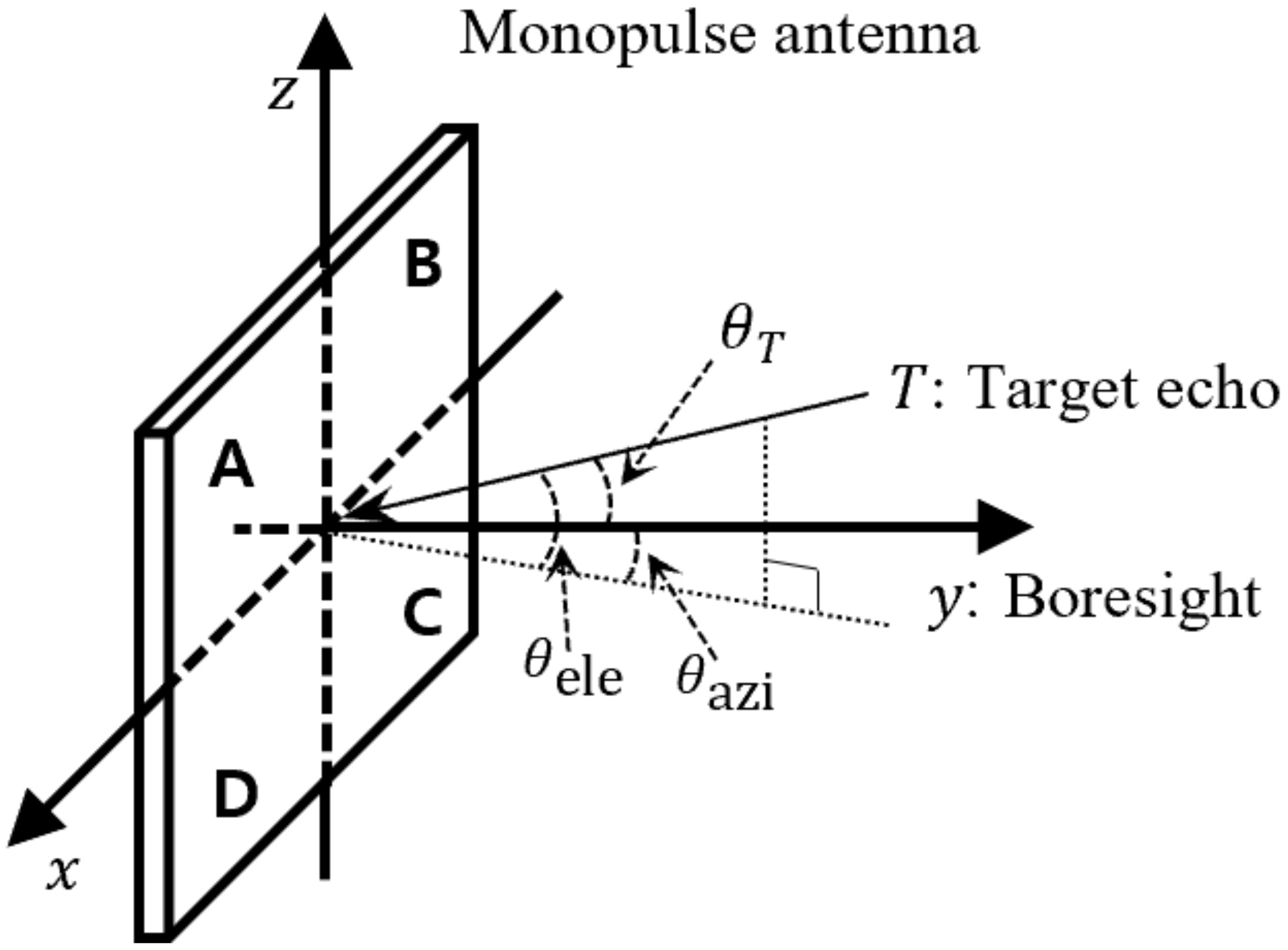
Radar can perform the functions of measuring the distance, angle, and speed of the target. The angle information of the target is obtained by measuring the direction of the radar pointing toward the target. The function of the radar tracking the target is implemented by inputting the estimated angle error to the servo system that controls the pointing direction of the radar. In general, lobe switching, conical scan, and monopulse systems are used to calculate the estimated angle error, and these radars are tracking radars. An amplitude-comparison monopulse (ACM) radar can accurately measure the estimated angle error of the target with only one pulse (monopulse). An ACM radar measures the target echo signal voltages through multiple squinted beams [
1]. The voltages of the received signal, obtained by using several squinted beams, are input to the difference channels and the sum channel, and the tracking error voltage can be obtained through the ratio of the outputs of these channels [
2,
3,
4]. Through these tracking error voltages, the antenna positioning servo motor is controlled so that the azimuth tracking error and elevation tracking error become zero [
5,
6].
Estimating various parameters of a radar target is affected by various noises. In the ACM, the noise has a great influence on the ability to estimate the angular position of the target. In some cases, noises can become an obstacle to the precise tracking of the target. In [
7,
8,
9,
10,
11,
12,
13], a performance analysis considering the deviation of the estimated angle of the target expressed as measurement noise and a performance analysis by internal error were conducted. In addition, various monopulse algorithms have been proposed to improve the angle estimation accuracy in the presence of noise and interfering signals.
In [
7], some facts related to the angle measurement precision of monopulse radar are analyzed. It is explained that the important factors related to angle measurement accuracy of monopulse radar are receiver output noise and squint angle. In relation to internal noise including output noise, a study was conducted to analyze the influence of internal errors. In [
8], four main types of monopulse receivers are analyzed with respect to the influence of internal error sources on the resulting measurement accuracy. In [
9], the authors presented the least-squares-based monopulse algorithm and a novel covariance prediction equation. The proposed method can accurately predict the performance of the monopulse algorithm. In [
10], the effect on the angle estimation ability of monopulse radar when amplitude and phase are not constant was studied. In addition, various monopulse algorithms are proposed to reduce the effects of various noises. Noise jamming is an effective jamming technique to degrade a radar’s capacity to estimate angles. This corresponds to artificial noise caused by an external source. Adaptive digital beamforming was proposed in [
11] to maintain the target angle estimation accuracy of the monopulse in the jamming effect. Conventionally, adaptive beamforming is proposed to suppress unwanted signals such as noise, but this technique causes beam distortion. The new monopulse algorithm proposed in [
12] acquires the target angle without distorting the beam shape. In addition, in order for the monopulse radar seeker to increase the angle measurement accuracy in the low signal-to-noise ratio (SNR) environment, the authors of [
13] proposed an estimation algorithm based on the Bayesian framework.
In previous studies [
14,
15], the MSE of the ACM direction-of-arrival (DOA) estimated angle was expressed as an analytic expression using the Taylor approximation and was compared with the Monte Carlo method. The analytical expressions proposed in [
14,
15] are highly computationally efficient. The final expressions quantifying the MSE of the monopulse algorithm in the previous studies are very long and complicated and are not intuitive. In addition, to take higher-order nonlinearities into account, higher-order Taylor expansion should be employed, which makes the expression of the MSE much more complicated. In [
16,
17,
18,
19], the output of the ACM radar under the influence of noise is analyzed via probability characteristics. In [
16], the monopulse ratio (MR) is regarded as a random variable and the probability density function (PDF) of the MR is derived. In [
17], the joint PDF is mathematically derived by dividing the MR into real and imaginary parts for each channel, and the result is used to develop marginal density for the special case of the real correlation of the channels. In [
18], the conditional mean and conditional variance are derived and quantified as threshold levels as well as the SNR. In [
19], the theoretical expression derived from [
18] is verified through simulation, and a detailed description is given to quantify the angle measurement performance under the multi-jamming effect. The PDF of the MR presented in [
16,
17] is derived for the general case considering the correlation of noise, but it is difficult to use due to the complexity of the formula. Moreover, in [
18,
19], it is difficult to analyze the angle estimation performance because the mean and variance of the MR for the SNR, not the estimated angle, are shown as results. Previous related studies analyzed the MR when the difference channel and sum channel of the MR are correlated with each other. We further analyzed the root mean square error (RMSE) of the estimated angle when the measurement noise correlated by an external noise source is received via a monopulse antenna.
In this paper, the RMSE of the estimated angle of the ACM algorithm is analytically derived using the PDF considering the probabilistic characteristics of the noise random variables, and the RMSE is calculated using numerical integration. The received noise random variables are the measurement noise received by the antenna elements. We analyzed the angle estimation performance by considering the correlation between these noise variables. The expectations of the channel noise variables are obtained as a linear combination of the expectations of the measured noise variables, but the variance of the channel noise variables requires additional consideration of the covariance terms as well as the variance of the measured noise variables. We describe a monopulse antenna with four antenna elements for azimuth and elevation measurements. Therefore, by defining six correlation coefficients between the four received noise variables, the variance and correlation coefficients of the channel noise are derived. The variances and correlation coefficients obtained in this way are used as arguments of the bivariate Gaussian PDF for the channel noise variables. Then, the RMSE is calculated by performing the integration considering only the main occurrence range of the channel noise.
In
Section 2.1, the equations for the signals received by the four antenna elements are defined. In
Section 2.2, the definition of the channel noise variables and their expectations and variances are derived. In
Section 2.3, an analytical expression of the RMSE of the estimated angle is described. In
Section 2.4, the Monte Carlo simulation-based RMSE to verify the analytically derived RMSE is presented and a method for generating correlated noise variables is described. In
Section 3, the analytical RMSEs are verified by comparing them with the Monte Carlo simulation-based RMSE, and the RMSE results for the correlation coefficient change between the received noise variables are presented. In addition, the correlation coefficient results of the channel noise variables to the ratio of variances of the received noise variables are presented, and the RMSE results are presented for the difference channel SNR and the sum channel SNR. In
Section 4, the validity of this study is emphasized through comparison with the performance analysis method proposed in related studies. In
Section 5, conclusions are drawn by analyzing the results obtained in
Section 3.
3. Result Analysis
In this section, we analyze the performance of the ACM algorithm under the influence of correlated noise. The correlation coefficient results of the channel noise for the noise power difference change are analyzed, and the results of the sum channel SNR and the difference channel SNRs for the correlation coefficient change are analyzed. In the performance analysis, the correlation coefficients of the noise variables received by the antenna elements are all set to be the same (i.e., ).
First, the results of the analytically derived RMSE equations are verified under various conditions via the Monte Carlo simulation-based RMSE. In
Figure 4,
Figure 5,
Figure 6 and
Figure 7, the results with the legend ‘Simulation RMSE’ of
and
are obtained from (
34), the results with the legend ‘Analytical RMSE’ of
are obtained from (
30), and the results with the legend ‘Analytical RMSE’ of
are obtained from (
31). Moreover, the
x-axis of
Figure 4,
Figure 5,
Figure 6 and
Figure 7 is obtained from
in (
29) and is in decibel units. The RMSE of the
y-axis is in degrees.
Figure 4 and
Figure 5 illustrate the dependence of the RMSE on the SNR and correlation coefficient with the increase in the SNR and correlation coefficient when the noise source and target are on the boresight axis (i.e., on-axis). In this case, it is assumed that the variances of the received noise variables are all equal.
Figure 4 shows the RMSE results for a high SNR, and
Figure 5 shows the RMSe results for a low SNR.
For a low SNR, many outliers occur at the estimated angle. Therefore, in
Figure 5, when calculating the RMSE, outliers such as very large estimated angle values were filtered by limiting the upper and lower limits.
In
Figure 4 and
Figure 5, the results with the legend ‘Analytical RMSE’ show good agreements with those with the legend ‘Simulation RMSE’. Note that the RMSE decreases when the correlation coefficient increases from 0.1 to 0.9. That is, as the correlation between the received noise variables increases, the accuracy of the estimated angle increases.
In
Table 1, the reduction rate of the RMSE for the increase in the correlation coefficient shown in
Figure 4 is tabulated. The reduction rate of the RMSE for several correlation coefficients is calculated based on the RMSE result with a correlation coefficient of zero. For a high SNR and on-axis, the RMSE decreases by approximately 20% as the correlation coefficient between the received noise variables increases by 0.2.
Figure 6 and
Figure 7 illustrate the dependence of the RMSE on the increase in the SNR and correlation coefficient when the target and noise source are off-axis. In this case, the variances of the received noise variables are given differently. If the target and the noise source are closest to the A-beam as the angle of incidence increases, the noise variable with the largest variance is received from the A-antenna element, and the variances of the noise variables received from the remaining antenna elements are smaller than the variance of the noise variable received from the A-antenna element. In addition, because the C-antenna element is the furthest from the A-antenna element, the variance of the noise variable received from the C-antenna element is set to be the smallest. In
Figure 6, the angles of incidence of the target are
, and in
Figure 7, the angles of incidence of the target are
.
In
Figure 6 and
Figure 7, the results with the legend ’Analytical RMSE’ show good agreements with those with the legend ’Simulation RMSE’. Moreover, as the correlation coefficient increases from 0.1 to 0.9, the RMSE decreases. Consequently, the analytically derived RMSE is verified by confirming the same results in various cases via
Figure 4,
Figure 5,
Figure 6 and
Figure 7.
The dependence of the channel noise correlation coefficient on the ratio of the variances of the received noise variables is illustrated in
Figure 8. The channel noise correlation coefficients (
,
) defined in (
21) and (
22) are determined according to (
19) and (
20), which are the covariances of the channel noise. If we rearrange the expression in (
19), we obtain
Here,
consists of terms
and
.
is the variance of
and
is the variance of
. Therefore,
Figure 8a illustrates the change of
with respect to the ratio of these two terms. Similarly, in
Figure 8b, the change of
is illustrated with respect to the ratio of
and
.
In
Figure 8, as
and
increase,
and
gradually decrease to negative numbers. In addition, as the correlation coefficient of the received noise variables increases from 0 to 0.99, the average rate of change and the absolute value of the channel noise correlation coefficient increases.
Figure 9 illustrates the difference channel SNR result for the sum channel SNR. As the correlation coefficient of the received noise variable increases, the difference channel SNR becomes larger than the sum channel SNR. In the result of the legend of ‘
’, if the correlation coefficient is zero, the covariance terms in (
16)–(
18) are all canceled, so that the variance of the difference channel noise and the variance of the sum channel noise are equal (the SNR becomes the same). When the correlation coefficient increases to 0.99, the difference channel SNR increases than the sum channel SNR due to the covariance terms.
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14 and
Figure 15 illustrate how the RMSE is dependent on the channel noise correlation coefficient, difference channel SNR, and sum channel SNR. The
x-axis is the difference channel SNR, and the
y-axis is the sum channel SNR. The figures show the channel noise correlation coefficients of
, 0, and
, respectively. In
Figure 10,
Figure 11 and
Figure 12, the target’s azimuth and elevation errors are positive, and in
Figure 13,
Figure 14 and
Figure 15, the target’s azimuth and elevation errors are negative. The RMSE is the lowest when the difference channel SNR and the sum channel SNR are 50dB, and the RMSE generally increases as the SNRs decrease. Overall, the RMSE increases more predominantly when the difference channel SNR decreases to 10 dB than when the sum channel SNR decreases to 10 dB. In
Figure 10,
Figure 11 and
Figure 12, when the channel noise correlation coefficient increases from
to
, the RMSE decreases, whereas in
Figure 13,
Figure 14 and
Figure 15, when the channel noise correlation coefficient increases from
to
, the RMSE rather increases.
5. Discussion
In
Section 3, first, the analytical RMSE is verified by comparing the results of the Monte Carlo simulation-based RMSE for various cases. In
Figure 4,
Figure 5,
Figure 6 and
Figure 7, it can be seen that the analytical RMSE result and the Monte Carlo simulation RMSE result show excellent agreements for the case where the SNRs are different and several correlation coefficients of the received noise variables are given. The RMSE results are consistent, but the operation times are not. The analytical RMSE calculates the main occurrence region of the noise variables through the PDF. In this respect, it can be calculated more efficiently and accurately than the Monte Carlo-based MSE, which is dependent on the number of repetitions.
In
Figure 4,
Figure 5,
Figure 6 and
Figure 7, it is confirmed that the RMSE decreased as the correlation coefficient between the received noise variables approached one. The reason why these results occur is that when the correlation coefficient approaches one, the correlated noises in the difference channel cancel each other out, so the SNR of the difference channel increases.
In
Figure 8a, the fact that
is less than 1 denotes that the magnitude of the noise received by the antenna elements B and C is larger than the magnitude of the noise received by the antenna elements A and D. Moreover, it can be explained that the noise source is located in the positive azimuth direction with respect to the boresight. Conversely, if
is greater than 1, it can be said that the noise source is located in the negative azimuth direction with respect to the boresight. This is explained equally for elevation.
In
Figure 8, when the power of the received noise dominates in the positive direction in the azimuth and elevation, the correlation coefficient of the channel noise is positive, and when the power of the received noise dominates in the negative direction, the correlation coefficient of the channel noise is negative. Moreover, when the correlation coefficient between the received noise variables increases, the change in the channel noise correlation coefficient becomes larger as the ratio of the received noise variances is changed, and the absolute value of the channel noise correlation coefficient is larger.
In summary, it can be explained that if the correlation coefficient between the received noise variables increases, the absolute value of the correlation coefficient of the channel noise increases and the RMSE of the estimated angle decreases. This is consistent with the results shown in [
16]. Reference [
16] explains that the larger the correlation coefficient between channels, the narrower the MR deviation becomes. The narrower the deviation of the MR, the more precise the estimated angle.
Figure 10,
Figure 11 and
Figure 12 show the result that the RMSE decreases as the correlation coefficient of the channel noise increases from negative to positive when the target’s azimuth and elevation are positive. On the other hand, in
Figure 13,
Figure 14 and
Figure 15, when the azimuth and elevation of the target are negative, the RMSE decreases as the correlation coefficient of the channel noise decreases from positive to negative. In
Figure 8, we find that the correlation coefficient of the channel noise changes from negative to positive when the noise source changes from negative to positive in the azimuth and elevation directions with respect to the boresight. Consequently, referring to the results of
Figure 8 and
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14 and
Figure 15, when the noise source and the target have the same sign in the azimuth and elevation directions, the RMSE decreases, and when the sign is different, the RMSE increases.
6. Conclusions
In general, ACM radar uses four squinted beams to simultaneously estimate azimuth and elevation. When noise from an external source is present, the noise is received in the four squinted beams, and the accuracy of estimating the angle of the target by the radar becomes low. Assuming this environment, in this study, we analyzed the RMSE of the ACM algorithm with an analytical equation in various cases by varying the correlation and variance of the noise variables received by the four antenna elements.
For verification, the results of the Monte Carlo simulation-based RMSE and the analytic equation-based RMSE are compared by varying the SNR and angle of incidence. It is confirmed that the results of the analytically derived RMSE equation and the Monte Carlo-based simulation RMSE are in good agreement. Moreover, we find that the absolute value of the channel noise correlation coefficient increases and the RMSE of the estimated angle decreases when the correlation coefficient between the received noise variables increases. In particular, when the SNR is high and the noise source is located on the axis, the RMSE decreases by 20% whenever the correlation coefficient between the reception noise variables increases by 0.2.
Referring to the results of the RMSE for the difference channel SNR and sum channel SNR and the results of the channel noise correlation coefficient for the noise variance ratio, it is confirmed that the RMSE decreases when the signs of the direction of the noise source and the target are the same, and the RMSE increases when the signs are different. Here, the same sign denotes that the azimuth or elevation direction of the target and the noise source with respect to the boresight is the same.
In this paper, it is assumed that the correlation coefficients between the received noise variables are all the same. However, in general, the correlation coefficients are different. In a future study, we will derive a correlation coefficient expression that depends on the direction of the noise signal, such as noise jamming, and will explicitly analyze the RMSE performance for the direction of the noise signal.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}