
Unknown System Dynamics Estimator-Based Anti-Disturbance Attitude Funnel Control for Quadrotors with Experimental Verifications


Abstract
:1. Introduction
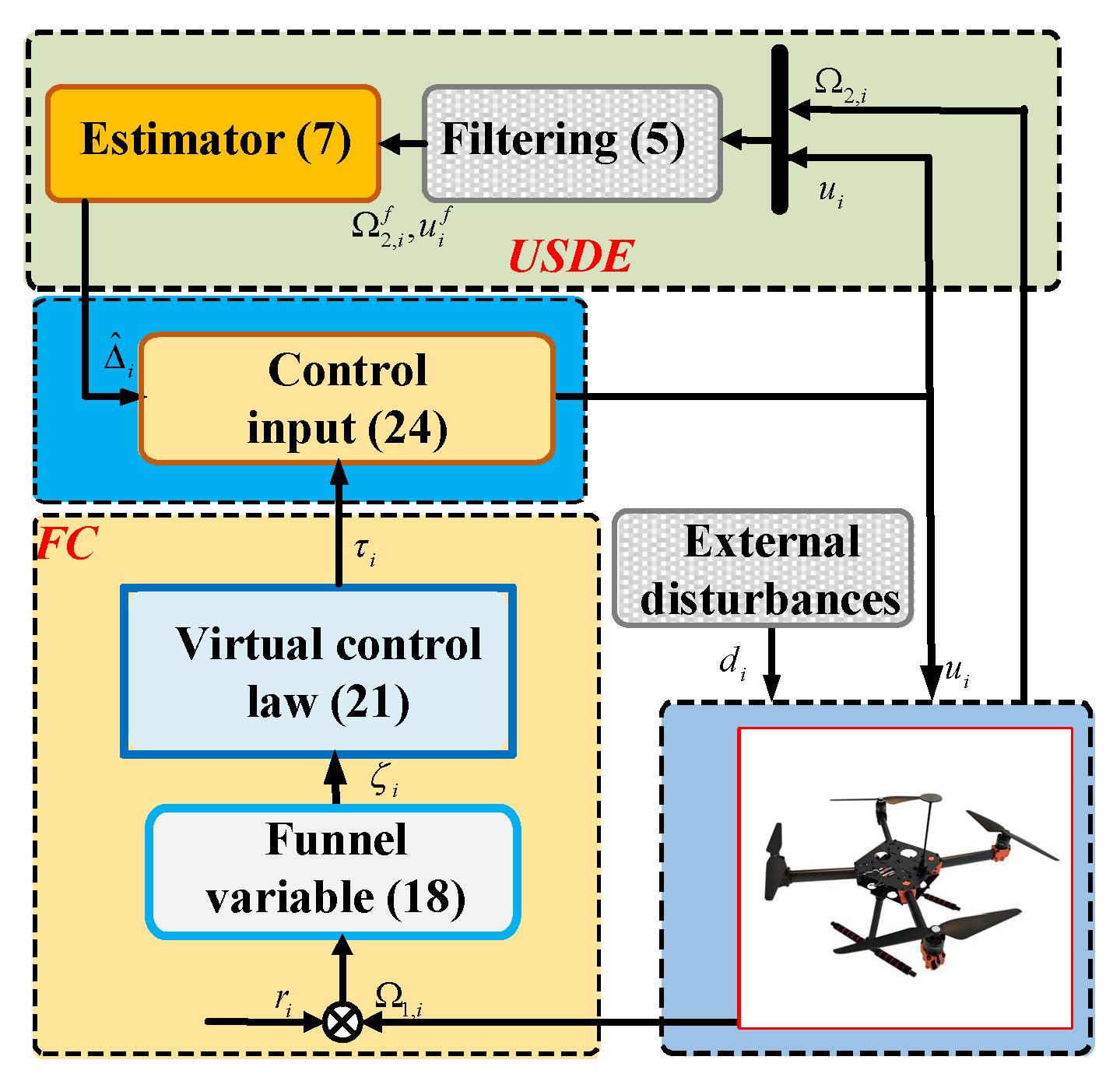
- Distinguishing it from the existing sliding mode observer [5,6,7,8]-based control strategies, where chattering cannot be efficaciously surmounted by raising the deployment of the sign function, the unknown system dynamics estimator (USDE) is presented for quadrotor attitude dynamics to identify the unmeasurable perturbations by utilizing an invariant manifold principle. In addition, differing from previous function approximator-based control schemes [12,13,14], by using simple filtering calculations for the available quadrotor states, a more concise design frame and a lower calculation burden could be guaranteed.
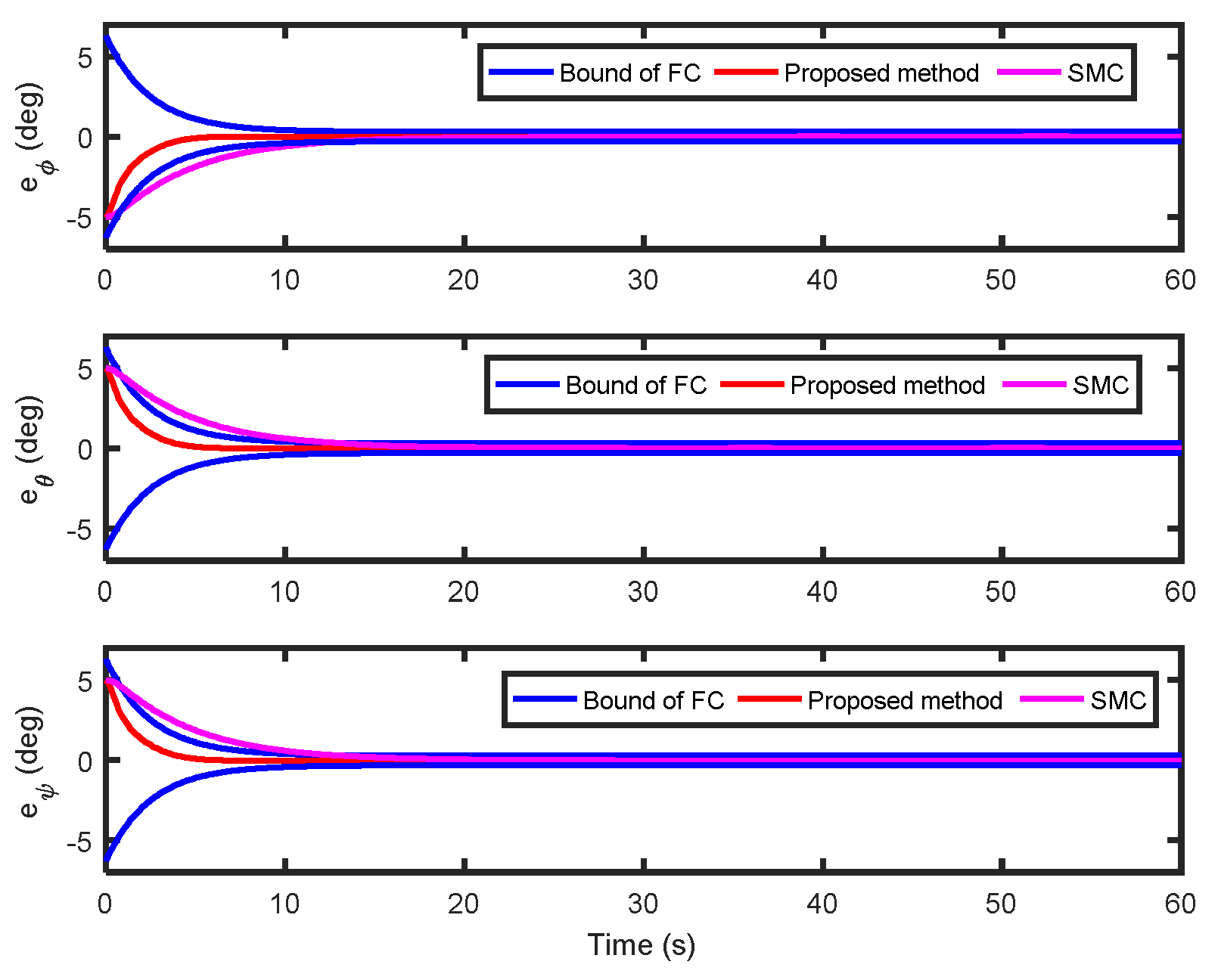
- In contrast to the conventional controllers [23,24], where the error decaying process of the quadrotors is governed by some unknown terms and only ultimately uniformly bounded (UUB) results are delivered, here, by predefining the funnel bound-based funnel variables, an FC was constructed to govern the transient and steady-state profiles as a priority, such that the overshoot, convergence time and steady-state errors could be regulated within the appropriate range. Significant efforts were devoted to entire system stability and error convergence analysis, which is more challenging than the existing FC-based controllers without considering uncertainties and USDE-related outcomes with no performance constraints. More importantly, several real-time validations concerning the suggested schemes on quadrotor platform were conducted for the first time.
2. Problem Statements
3. Main Results
3.1. Unknown System Dynamics Estimator Design
3.2. Controller Design
4. Stability Analysis
5. Simulations
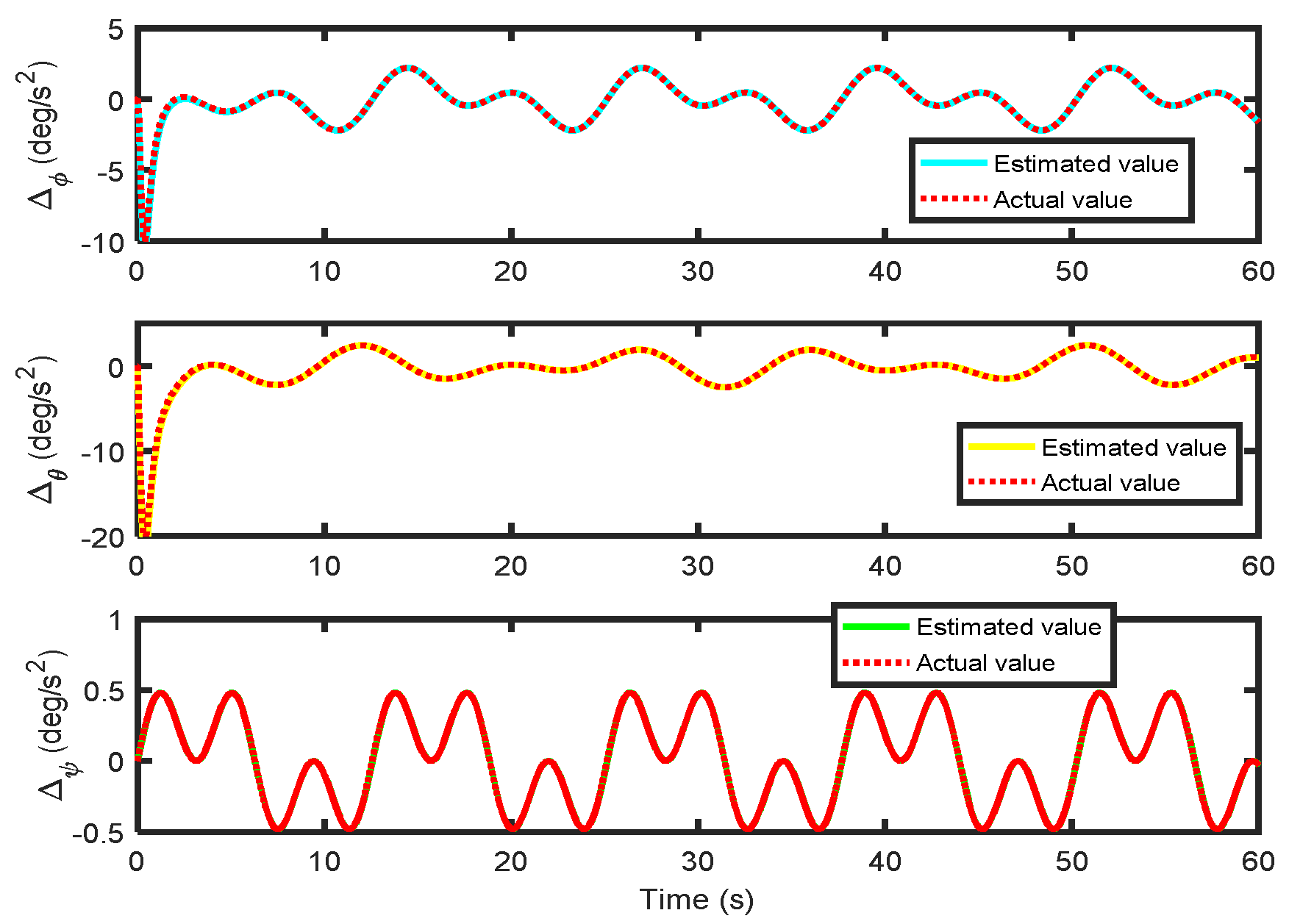
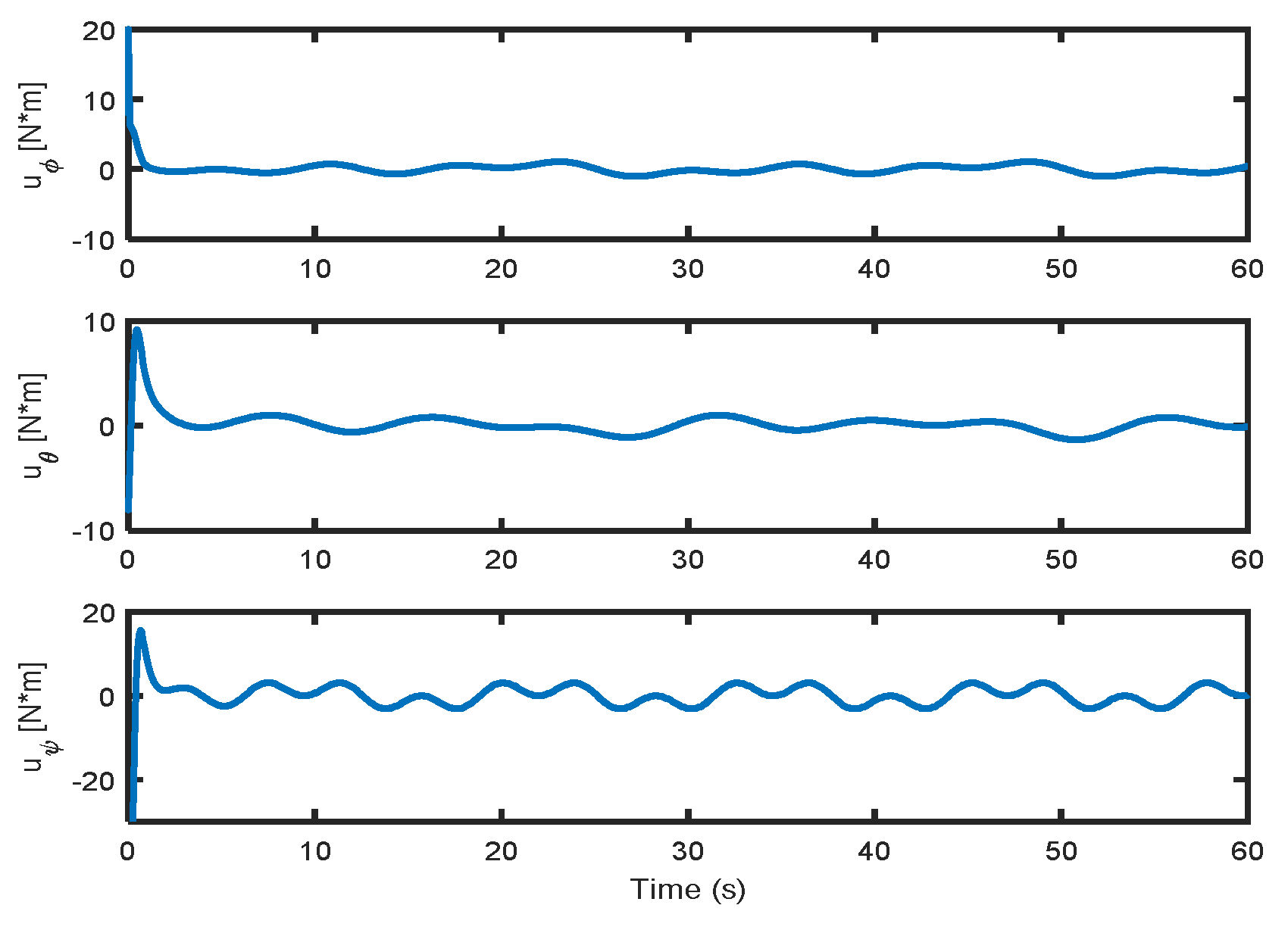
5.1. Simulation Validation for Effectiveness
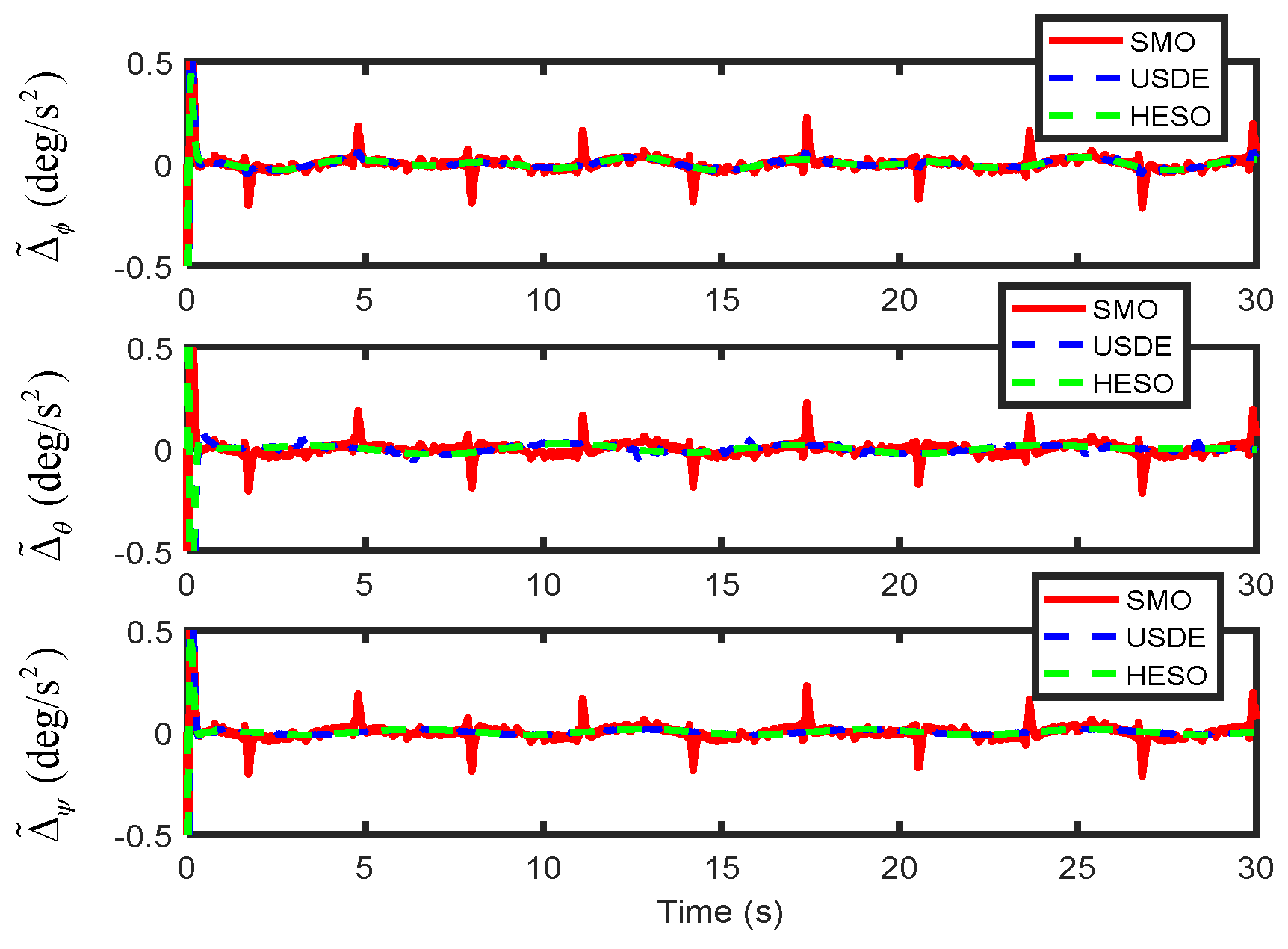
5.2. Simulation Validation for Superiority
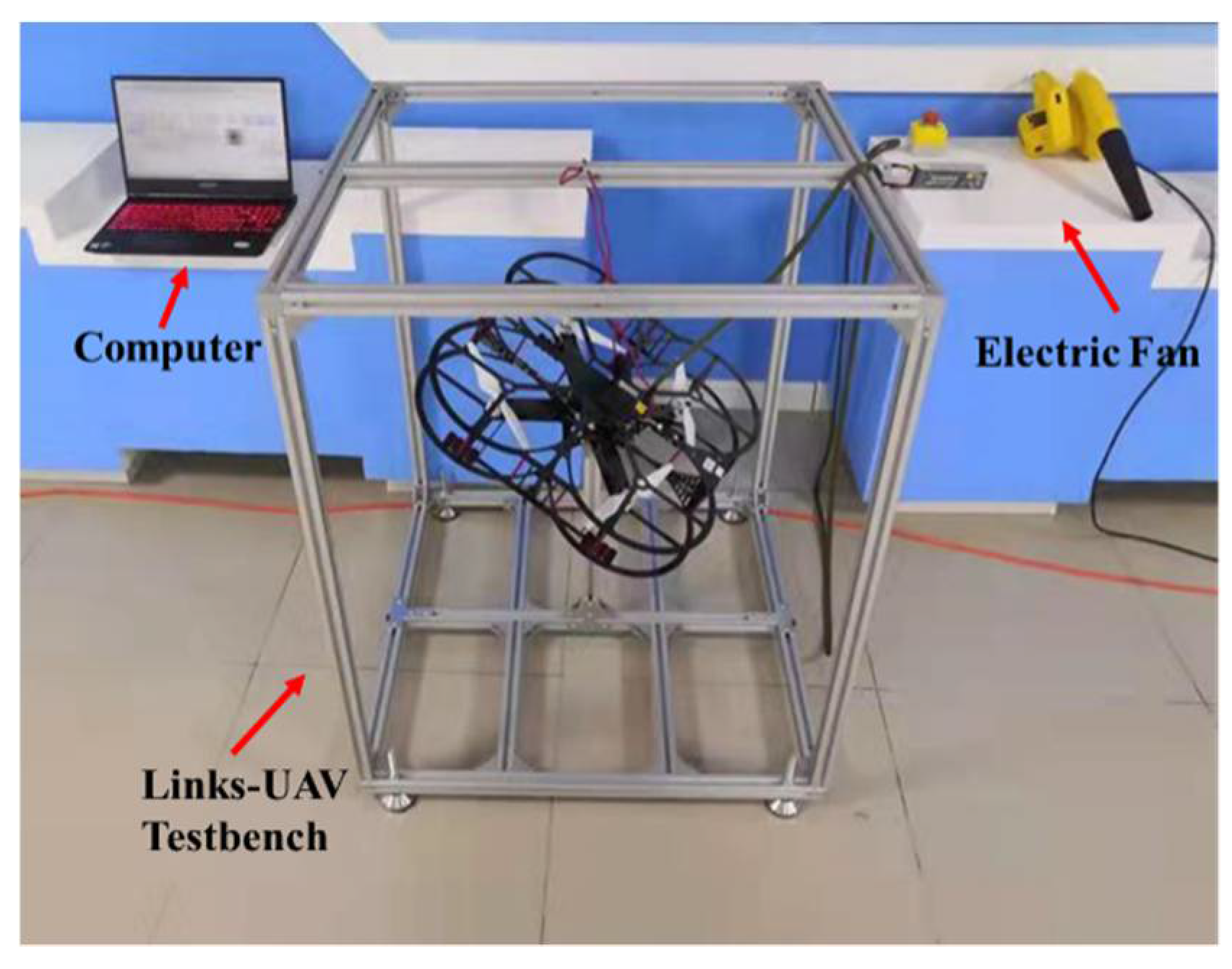
6. Experimental Verifications
6.1. Experimental Validation for Effectiveness
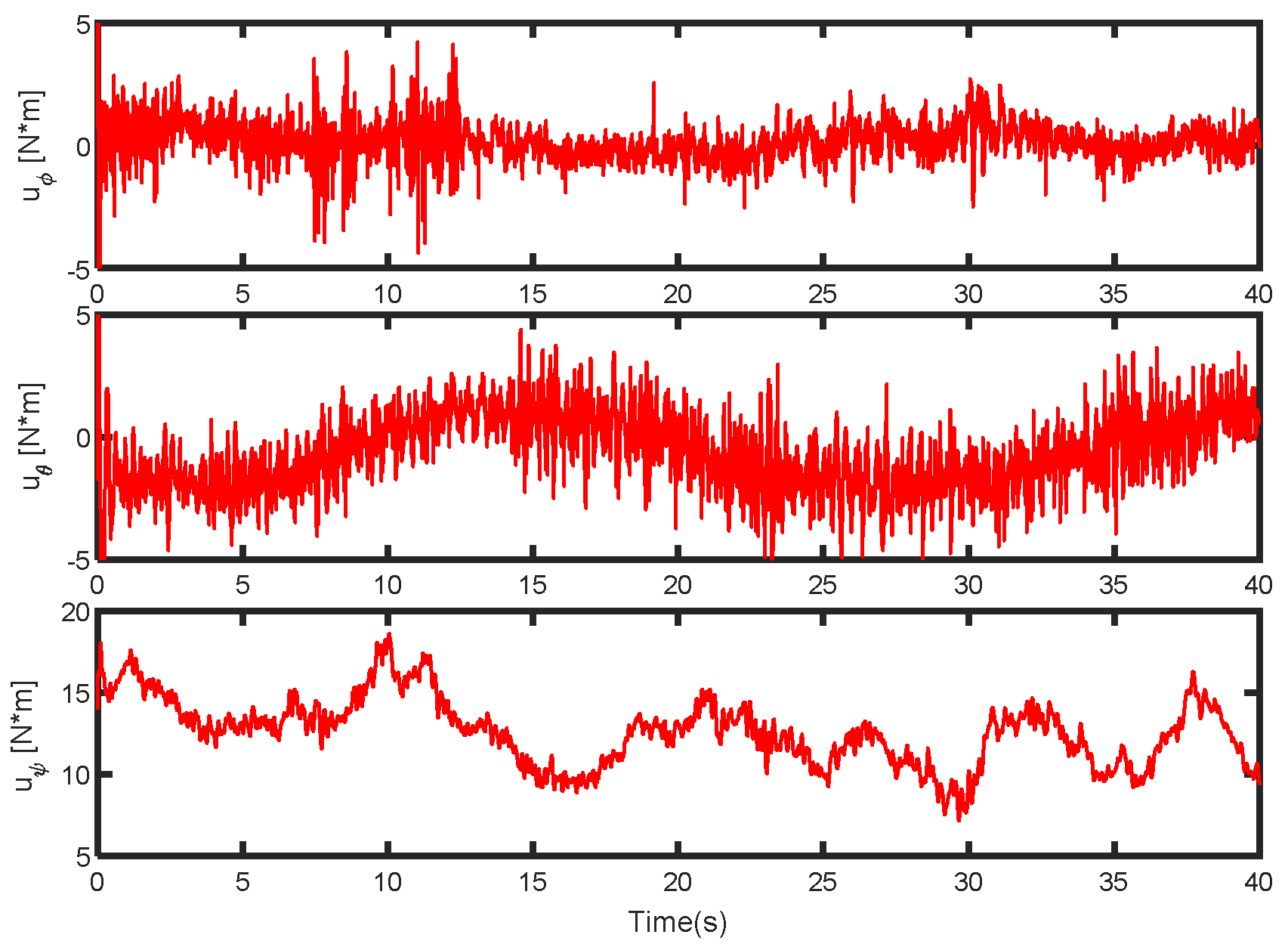
6.2. Experimental Validation for Superiority
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qi, J.; Ping, Y.; Wang, M.; Wu, C. Online trajectory planning method for double-pendulum quadrotor transportation systems. Electronics 2022, 11, 50. [Google Scholar] [CrossRef]
- Shao, X.; Xu, L.; Zhang, W. Quantized control capable of appointed-time performances for quadrotor attitude tracking: Experimental validation. IEEE Trans. Ind. Electron. 2022, 69, 5100–5110. [Google Scholar] [CrossRef]
- Yue, X.; Shao, X.; Zhang, W. Elliptical encircling of quadrotors for a dynamic target subject to aperiodic signals updating. IEEE Trans. Intell. Transp. 2021, 1–14. [Google Scholar] [CrossRef]
- Beak, J.; Jung, J. A model-free control scheme for attitude stabilization of quadrotor systems. Electronics 2020, 9, 1586. [Google Scholar] [CrossRef]
- Zhou, S.; Guo, K.; Yu, X.; Guo, L.; Xie, L. Fixed-time observer based safety control for a quadrotor UAV. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2815–2825. [Google Scholar] [CrossRef]
- González, J.A.C.; Salas-Peña, O.; De León-Morales, J. Observer-based super twisting design: A comparative study on quadrotor altitude control. ISA Trans. 2021, 109, 307–314. [Google Scholar] [CrossRef]
- Zhao, Z.; Cao, D.; Yang, J.; Wang, H. High-order sliding mode observer-based trajectory tracking control for a quadrotor UAV with uncertain dynamics. Nonlinear Dyn. 2020, 102, 2583–2596. [Google Scholar] [CrossRef]
- Heo, J.; Chwa, D. Robust tracking control using Integral sliding mode observer for quadrotors considering motor and propeller dynamics and disturbances. J. Electr. Eng. Technol. 2021, 16, 3247–3260. [Google Scholar] [CrossRef]
- Cui, L.; Zhang, R.; Yang, H.; Zuo, Z. Adaptive super-twisting trajectory tracking control for an unmanned aerial vehicle under gust winds. Aerosp. Sci. Technol. 2021, 115, 106833. [Google Scholar] [CrossRef]
- Suhail, S.A.; Bazaz, M.A.; Hussain, S. Adaptive sliding mode-based active disturbance rejection control for a quadcopter. Trans. Inst. Meas. Control 2022. [Google Scholar] [CrossRef]
- Lotufo, M.A.; Colangelo, L.; Novara, C. Control design for UAV quadrotors via embedded model control. IEEE Trans. Control Syst. Technol. 2020, 28, 1741–1756. [Google Scholar] [CrossRef]
- Das, A.; Lewis, F.; Subbarao, K. Backstepping Approach for Controlling a Quadrotor Using Lagrange Form Dynamics. J. Intell. Robot. Syst. 2009, 56, 127–151. [Google Scholar] [CrossRef]
- Ullah, M.; Zhao, C.; Maqsood, H. Improved radial basis function artificial neural network and exact-time extended state observer based non-singular rapid terminal sliding-mode control of quadrotor system. Aircr. Eng. Aerosp. Technol. 2022; ahead-of-print. [Google Scholar] [CrossRef]
- Shao, X.L.; Shi, Y.; Zhang, W.D. Fault-tolerant quantized control for flexible air-breathing hypersonic vehicles with appoint-ed-time tracking performances. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1261–1273. [Google Scholar] [CrossRef]
- Wang, S.; Tao, L.; Chen, Q.; Na, J.; Ren, X. USDE-based sliding mode control for servo mechanisms with unknown system dynamics. IEEE/ASME Trans. Mechatron. 2020, 25, 1056–1066. [Google Scholar] [CrossRef]
- Na, J.; Jing, B.; Huang, Y.; Gao, G.; Zhang, C. Unknown system dynamics estimator for motion control of nonlinear robotic systems. IEEE Trans. Ind. Electron. 2020, 67, 3850–3859. [Google Scholar] [CrossRef]
- Ilchmann, A.; Ryan, E.P.; Townsend, P. Tracking control with prescribed transient behaviour for systems of known relative degree. Syst. Control Lett. 2006, 55, 396–406. [Google Scholar] [CrossRef] [Green Version]
- Berger, T.; Lê, H.H.; Reis, T. Funnel control for nonlinear systems with known strict relative degree. Automatica 2018, 87, 345–357. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, Y.; Shen, H.; Liu, Q.; Yao, J. Funnel function-based asymptotic output feedback control of hydraulic systems with prescribed performance. IET Control Theory Appl. 2021, 15, 2271–2285. [Google Scholar] [CrossRef]
- Wang, S.; Yu, H.; Yu, J.; Na, J.; Ren, X. Neural-network-based adaptive funnel control for servo mechanisms with unknown dead-zone. IEEE Trans. Cybern. 2020, 50, 1383–1394. [Google Scholar] [CrossRef]
- Zahedi, M.; Binazadeh, H. Robust output tracking of nonlinear systems with transient improvement via funnel-based sliding mode control. Trans. Inst. Meas. Control. 2020, 42, 3225–3233. [Google Scholar] [CrossRef]
- Verginis, C.K.; Dimarogonas, D.V. Asymptotic tracking of second-order nonsmooth feedback stabilizable unknown systems with prescribed transient response. IEEE Trans. Autom. Control 2020, 66, 3296–3302. [Google Scholar] [CrossRef]
- Yogi, S.C.; Tripathi, V.K.; Behera, L. Adaptive integral sliding mode control using fully connected recurrent neural network for position and attitude control of quadrotor. IEEE Trans. Neural Networks Learn. Syst. 2021, 32, 5595–5609. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.; Wang, R.J. Antisaturation command filtered backstepping control-based disturbance rejection for a quadrotor UAV. IEEE Trans. Circuits Syst. II-Express Briefs 2021, 68, 2577–2581. [Google Scholar]
- Tian, B.; Cui, J.; Lu, H.; Zuo, Z.; Zong, Q. Adaptive finite-time attitude tracking of quadrotors with experiments and comparisons. IEEE Trans. Ind. Electron. 2019, 66, 9428–9438. [Google Scholar] [CrossRef]
- Tang, P.; Lin, D.; Zheng, D.; Fan, S.; Ye, J. Observer based finite-time fault tolerant quadrotor attitude control with actuator faults. Aerosp. Sci. Technol. 2020, 104, 105968. [Google Scholar] [CrossRef]
- Na, J.; Yang, J.; Wang, S.; Gao, G.; Yang, C. Unknown dynamics estimator-based output-feedback control for nonlinear pure-feedback systems. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 51, 3832–3843. [Google Scholar] [CrossRef]
- Huang, Y.; Wu, J.; Na, J.; Han, S.; Gao, G. Unknown system dynamics estimator for active vehicle suspension control systems with time-varying delay. IEEE Trans. Cybern. 2021, 1–11. [Google Scholar] [CrossRef]
- Zhang, W.; Shao, X.; Zhang, W. Unknown input observer-based appointed-time funnel control for quadrotors. Aerosp. Sci. Technol. 2022, 126, 107351. [Google Scholar] [CrossRef]
- Shao, X.; Shi, Y.; Zhang, W. Input-and-measurement event-triggered output-feedback chattering reduction control for MEMS gyroscopes. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Shao, X.; Zhang, J.; Zhang, W. Distributed Cooperative Surrounding Control for Mobile Robots with Uncertainties and Aperiodic Sampling. IEEE Trans. Intell. Transp. 2022. [Google Scholar] [CrossRef]
- Wang, H.; Zou, Y.; Liu, P.X.; Liu, X. Robust fuzzy adaptive funnel control of nonlinear systems with dynamic uncertainties. Neurocomputing 2018, 314, 299–309. [Google Scholar] [CrossRef]
- Ríos, H.; Falcón, R.; González, O.A.; Dzul, A. Continuous sliding-mode control strategies for quadrotor robust tracking: Real-time application. IEEE Trans. Ind. Electron. 2019, 66, 1264–1272. [Google Scholar] [CrossRef]
- Chen, H.; Shao, X.; Xu, L.; Jia, R. Finite-time attitude control with chattering suppression for quadrotors based on high-order extended state observer. IEEE Access 2021, 9, 159724–159733. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Values |
|---|---|
| Moment of inertia | |
| Inertia moment uncertainties | |
| Environmental disturbances |
| Section | Values |
|---|---|
| USDE | |
| Funnel control | |
| Control law |
| Index | Notation | USDE | SMO | HESO |
|---|---|---|---|---|
| Estimation accuracy | 0.0247 | 0.0876 | 0.0311 | |
| 0.0277 | 0.0941 | 0.0292 | ||
| 0.0301 | 0.0899 | 0.0371 | ||
| Computational burden | 5.11% | 42.01% | 37.13% |
| Index | Notation | Proposed Method | SMC |
|---|---|---|---|
| Convergence time | 5.818 | 10.240 | |
| 3.916 | 10.238 | ||
| 3.899 | 11.786 | ||
| Tracking accuracy (standard deviation) | 0.0022 | 0.1087 | |
| 0.0274 | 0.1117 | ||
| 0.0276 | 0.0781 | ||
| Integrated absolute of control inputs | 33.9 | 179.86 | |
| 36.85 | 199.73 | ||
| 109.7 | 116.4 |
| Index | Notation | Proposed Method | SMC |
|---|---|---|---|
| Convergence time | 5.175 | 5.941 | |
| 4.828 | 7.143 | ||
| 5.213 | 9.911 | ||
| Tracking accuracy (Standard deviation) | 0.651 | 0.927 | |
| 0.943 | 1.376 | ||
| 0.759 | 1.843 | ||
| Integrated absolute of control inputs | 121.59 | 167.01 | |
| 129.46 | 189.55 | ||
| 204.45 | 381.16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhen, S.; Zhang, L. Unknown System Dynamics Estimator-Based Anti-Disturbance Attitude Funnel Control for Quadrotors with Experimental Verifications. Electronics 2022, 11, 2136. https://doi.org/10.3390/electronics11142136
Zhen S, Zhang L. Unknown System Dynamics Estimator-Based Anti-Disturbance Attitude Funnel Control for Quadrotors with Experimental Verifications. Electronics. 2022; 11(14):2136. https://doi.org/10.3390/electronics11142136
Chicago/Turabian StyleZhen, Shiyu, and Lihong Zhang. 2022. "Unknown System Dynamics Estimator-Based Anti-Disturbance Attitude Funnel Control for Quadrotors with Experimental Verifications" Electronics 11, no. 14: 2136. https://doi.org/10.3390/electronics11142136