
Automatic Detection of Driver Fatigue Based on EEG Signals Using a Developed Deep Neural Network

 , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
- Demonstration of an autonomous driver fatigue detection system in the face of environmental noises.
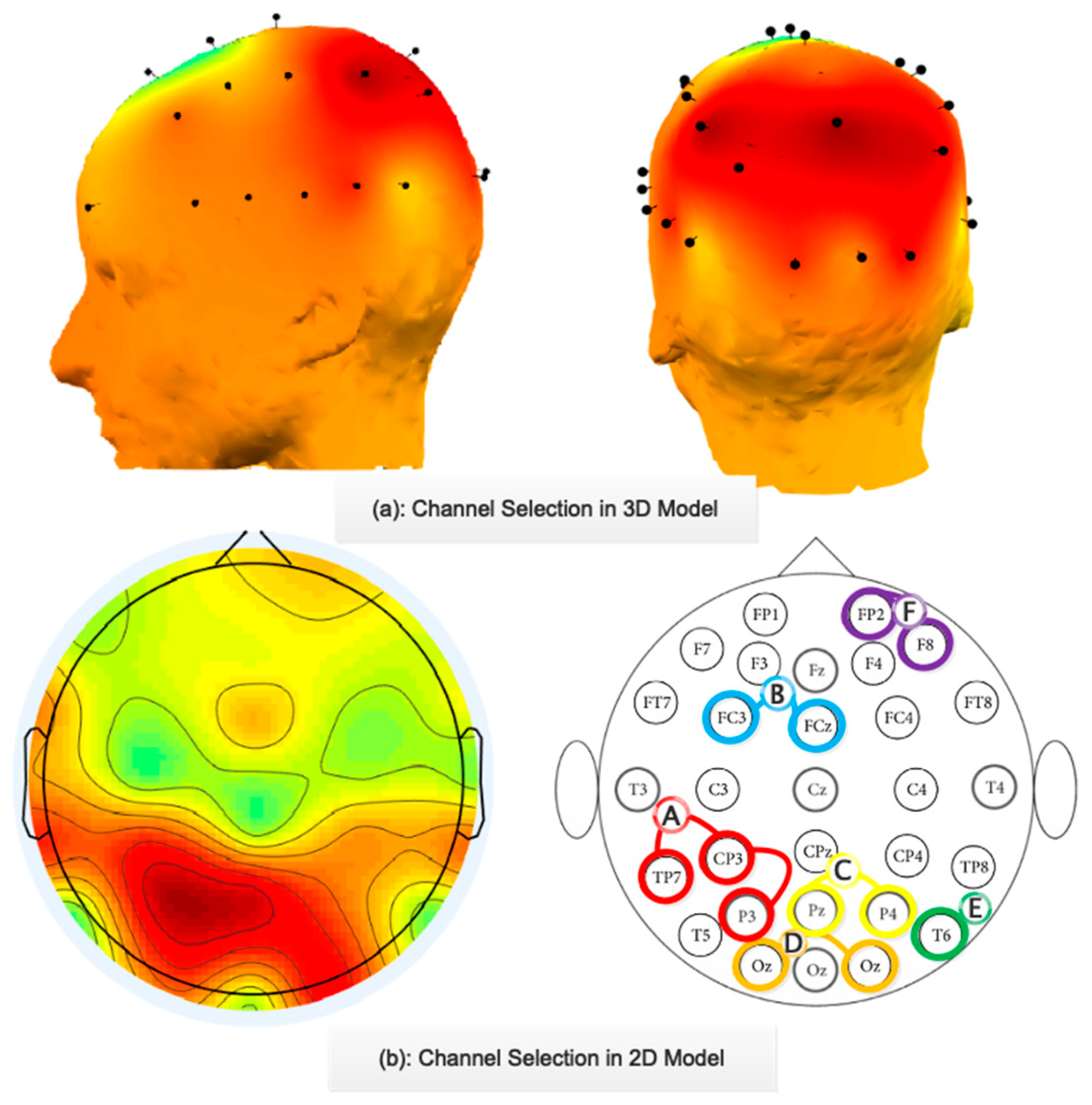
- Selecting active regions to reduce computational complexity.
- Compiling a complete dataset in accordance with stated norms.
- Developing a deep CNN–LSTM network capable of obtaining promising outcomes in all areas in the analyzed dataset.
2. Materials and Methods
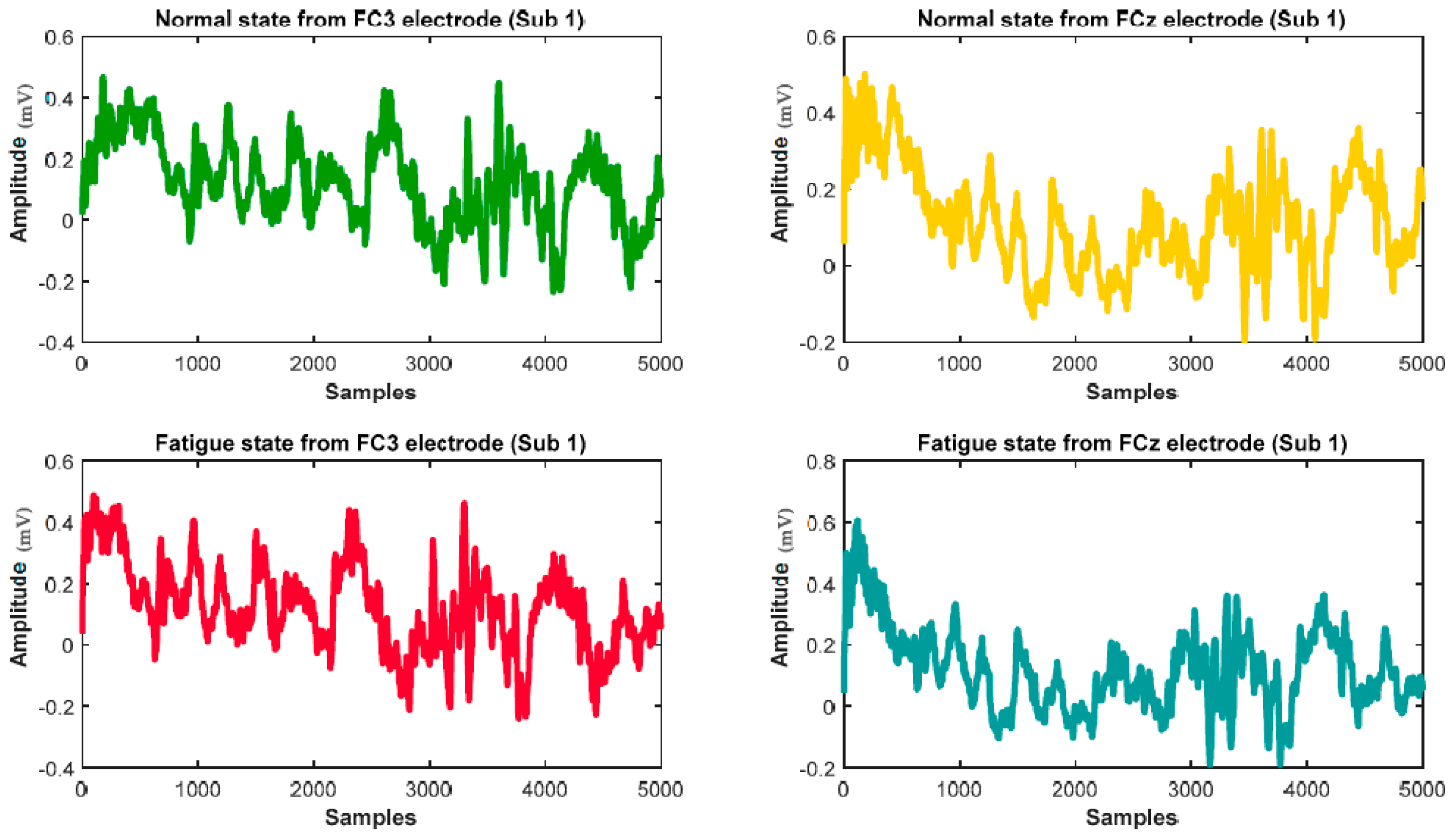
2.1. Acquisition of EEG Data
2.2. An Overview of the Deep Convolutional Neural Network (CNN)
2.3. Brief Description of Long Short-Term Memory (LSTM) Network
3. Proposed Method
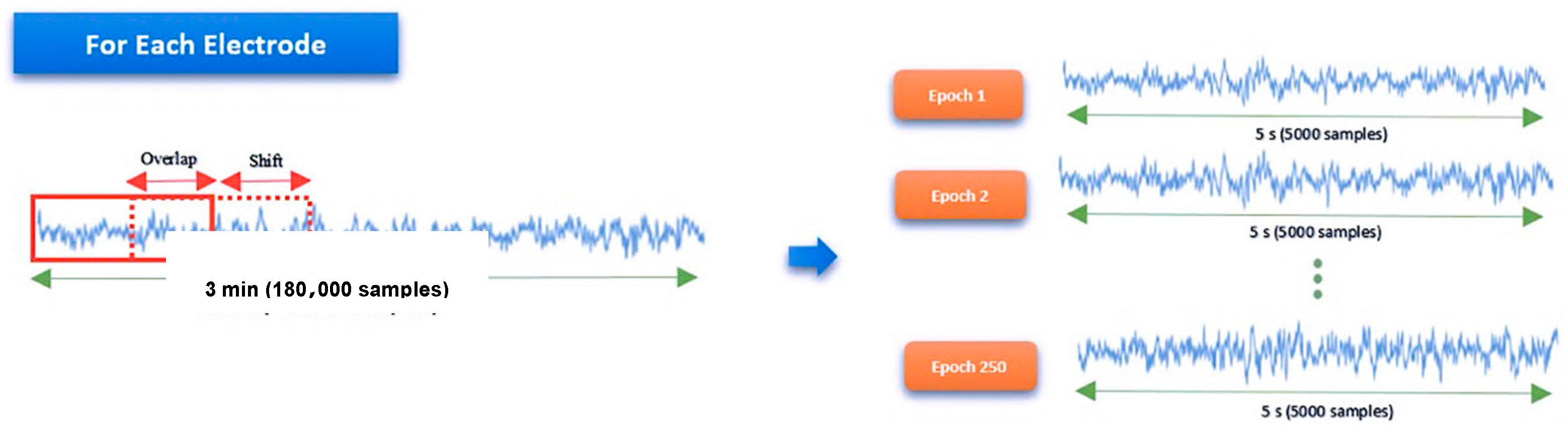
3.1. Data Preprocessing
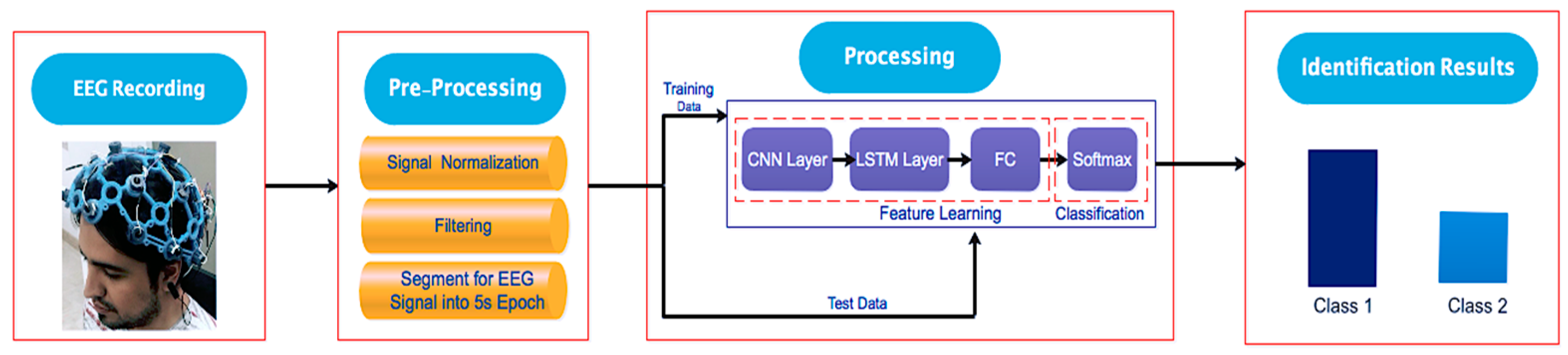
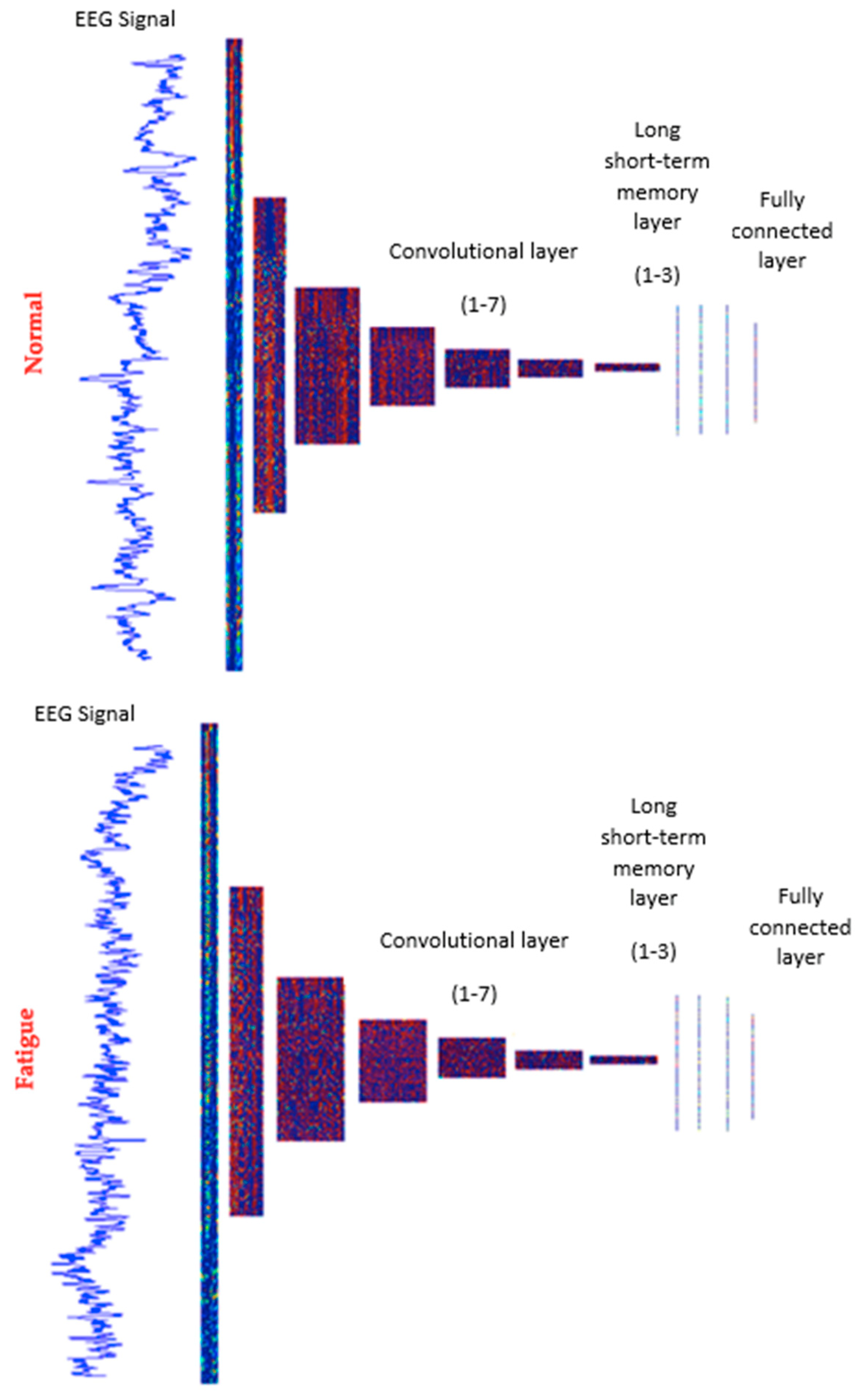
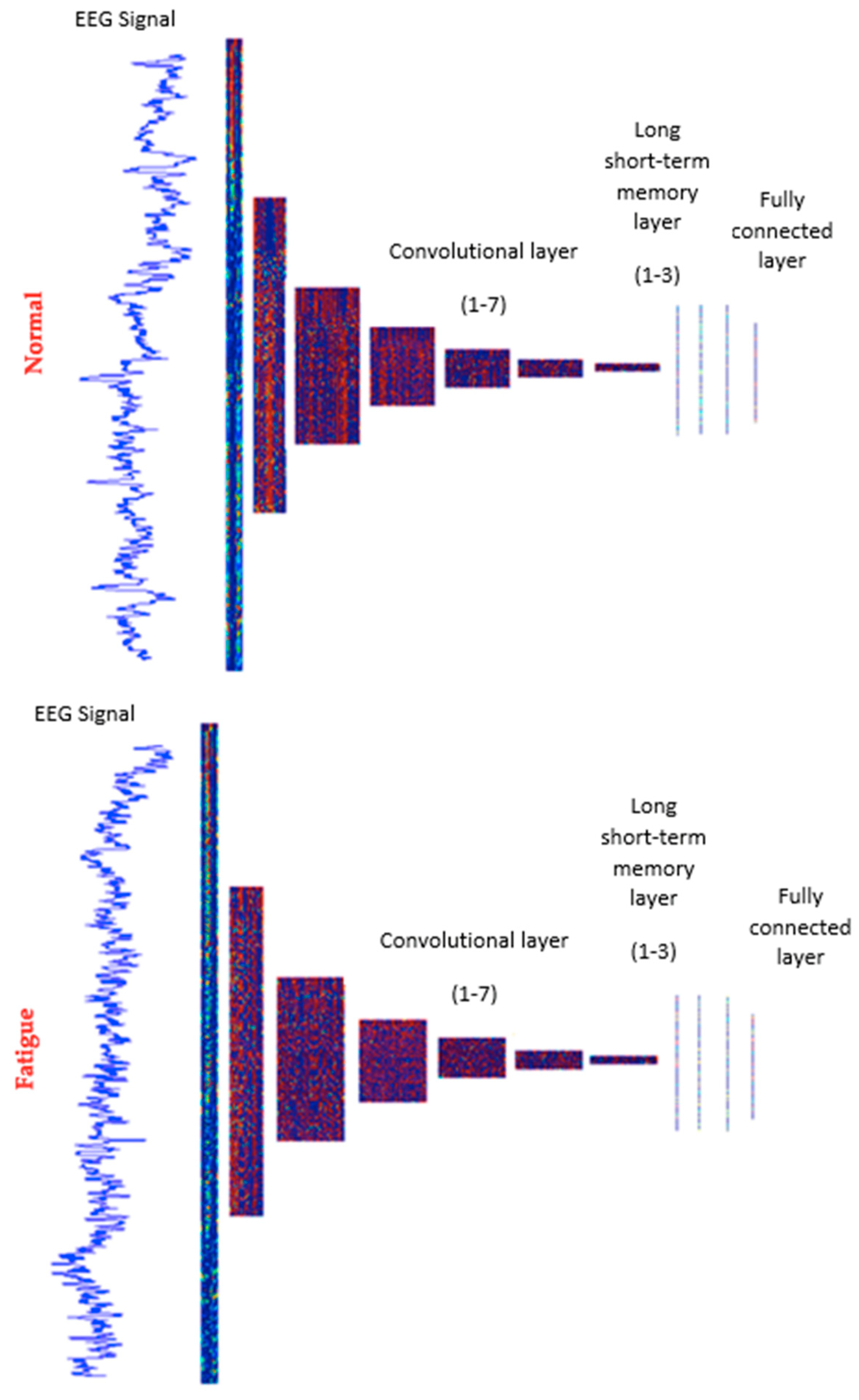
3.2. Proposed Deep CNN–LSTM Network Architecture
4. Results
4.1. Obtained Results
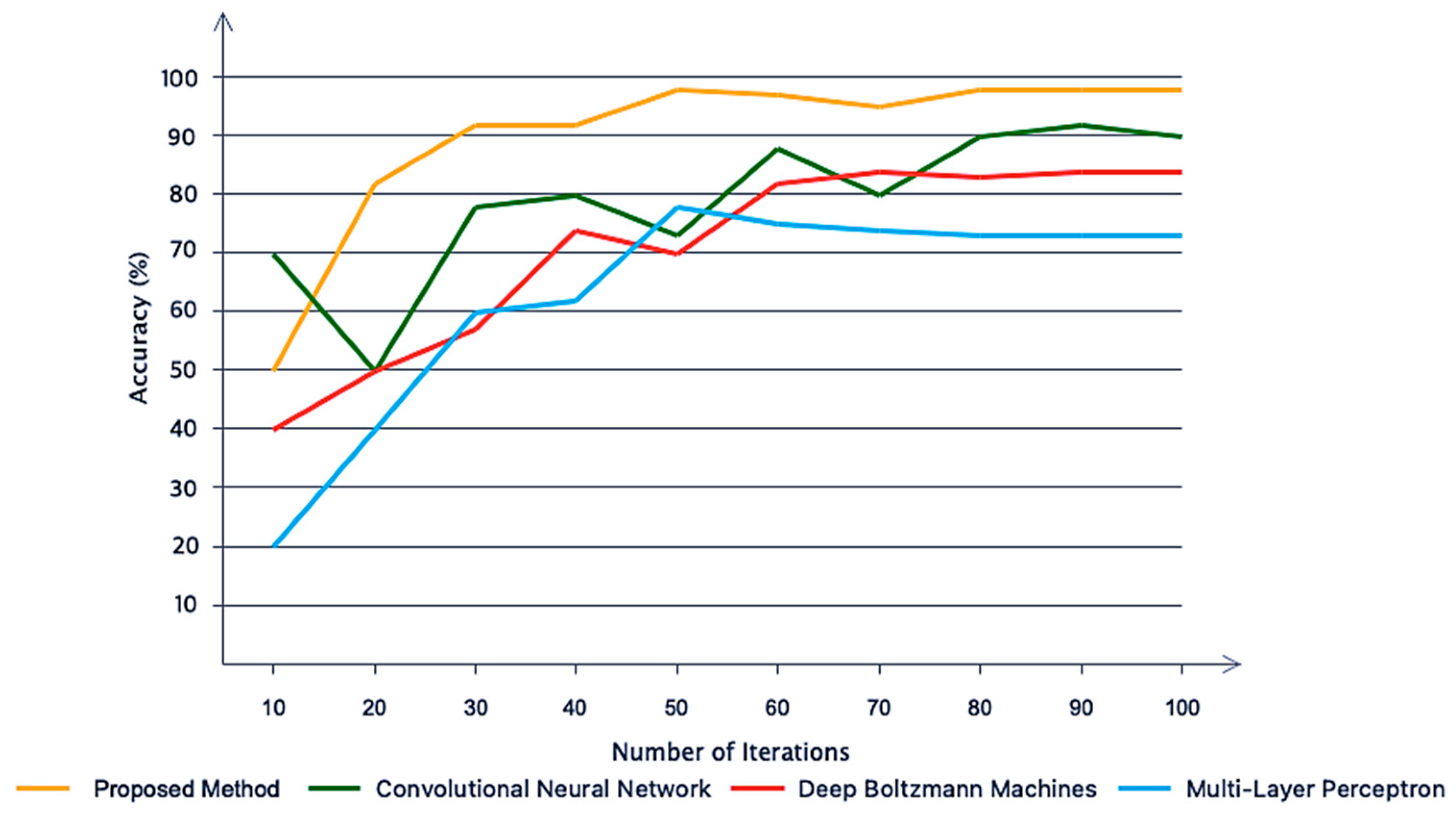
4.2. Comparison of the Proposed Method with Recent Research and Methods
4.3. Intuitive Evaluation
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2015; World Health Organization: Geneva, Switzerland, 2015. [Google Scholar]
- Rau, P.S. In Drowsy driver detection and warning system for commercial vehicle drivers: Field operational test design, data analyses, and progress. In Proceedings of the 19th International Conference on Enhanced Safety of Vehicles, Washington, DC, USA, 6–9 June 2005; pp. 6–9. [Google Scholar]
- Chacon-Murguia, M.I.; Prieto-Resendiz, C. Detecting Driver Drowsiness: A survey of system designs and technology. IEEE Consum. Electron. Mag. 2015, 4, 107–119. [Google Scholar] [CrossRef]
- Sahayadhas, A.; Sundaraj, K.; Murugappan, M. Detecting driver drowsiness based on sensors: A review. Sensors 2012, 12, 16937–16953. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bengler, K.; Dietmayer, K.; Farber, B.; Maurer, M.; Stiller, C.; Winner, H. Three Decades of Driver Assistance Systems: Review and Future Perspectives. IEEE Intell. Transp. Syst. Mag. 2014, 6, 6–22. [Google Scholar] [CrossRef]
- Rommerskirchen, C.P.; Helmbrecht, M.; Bengler, K.J. The Impact of an Anticipatory Eco-Driver Assistant System in Different Complex Driving Situations on the Driver Behavior. IEEE Intell. Transp. Syst. Mag. 2014, 6, 45–56. [Google Scholar] [CrossRef]
- Sałapatek, D.; Dybała, J.; Czapski, P.; Skalski, P. Driver drowsiness detection systems. Zesz. Nauk. Inst. Pojazdów/Politech. Warsz. 2017, 3, 41–48. [Google Scholar]
- Eichelberger, A.H.; McCartt, A.T. Volvo Drivers’ Experiences with Advanced Crash Avoidance and Related Technologies. Traffic Inj. Prev. 2013, 15, 187–195. [Google Scholar] [CrossRef]
- Sommer, D.; Golz, M. In Evaluation of PERCLOS based current fatigue monitoring technologies. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 30 August–4 September 2010; pp. 4456–4459. [Google Scholar]
- Simons, R.; Martens, M.; Ramaekers, J.; Krul, A.; Klöpping-Ketelaars, I.; Skopp, G. Effects of dexamphetamine with and without alcohol on simulated driving. Psychopharmacology 2011, 222, 391–399. [Google Scholar] [CrossRef] [Green Version]
- Das, D.; Zhou, S.; Lee, J.D. Differentiating Alcohol-Induced Driving Behavior Using Steering Wheel Signals. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1355–1368. [Google Scholar] [CrossRef]
- Verster, J.C.; Bervoets, A.C.; de Klerk, S.; Vreman, R.A.; Olivier, B.; Roth, T.; Brookhuis, K.A. Effects of alcohol hangover on simulated highway driving performance. Psychopharmacology 2014, 231, 2999–3008. [Google Scholar] [CrossRef]
- Kar, S.; Bhagat, M.; Routray, A. EEG signal analysis for the assessment and quantification of driver’s fatigue. Transp. Res. Part F Traffic Psychol. Behav. 2010, 13, 297–306. [Google Scholar] [CrossRef]
- Hua, X.; Ono, Y.; Peng, L.; Xu, Y. Unsupervised Learning Discriminative MIG Detectors in Nonhomogeneous Clutter. IEEE Trans. Commun. 2022, 57, 1–10. [Google Scholar] [CrossRef]
- Horstmann, S.; Ramirez, D.; Schreier, P.J. Two-Channel Passive Detection of Cyclostationary Signals. IEEE Trans. Signal Process. 2020, 68, 2340–2355. [Google Scholar] [CrossRef]
- Correa, A.G.; Orosco, L.; Laciar, E. Automatic detection of drowsiness in EEG records based on multimodal analysis. Med. Eng. Phys. 2014, 36, 244–249. [Google Scholar] [CrossRef] [PubMed]
- Xiong, Y.; Gao, J.; Yang, Y.; Yu, X.; Huang, W. Classifying Driving Fatigue Based on Combined Entropy Measure Using EEG Signals. Int. J. Control Autom. 2016, 9, 329–338. [Google Scholar] [CrossRef]
- Chai, R.; Naik, G.R.; Nguyen, T.N.; Ling, S.H.; Tran, Y.; Craig, A.; Nguyen, H.T. Driver Fatigue Classification with Independent Component by Entropy Rate Bound Minimization Analysis in an EEG-Based System. IEEE J. Biomed. Health Inform. 2017, 21, 715–724. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, H.; Fu, R. Automated Detection of Driver Fatigue Based on Entropy and Complexity Measures. IEEE Trans. Intell. Transp. Syst. 2013, 15, 168–177. [Google Scholar] [CrossRef]
- Yin, J.; Hu, J.; Mu, Z. Developing and evaluating a mobile driver fatigue detection network based on electroencephalograph signals. Health Technol. Lett. 2016, 4, 34–38. [Google Scholar] [CrossRef]
- Ko, L.-W.; Lai, W.-K.; Liang, W.-G.; Chuang, C.-H.; Lu, S.-W.; Lu, Y.-C.; Hsiung, T.-Y.; Wu, H.-H.; Lin, C.-T. In Single channel wireless EEG device for real-time fatigue level detection. In Proceedings of the 2015 International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–17 July 2015; pp. 1–5. [Google Scholar]
- Wang, Y.; Liu, X.; Zhang, Y.; Zhu, Z.; Liu, D.; Sun, J. In Driving fatigue detection based on EEG signal. In Proceedings of the 2015 Fifth International Conference on Instrumentation and Measurement, Computer, Communication and Control (IMCCC), Qinhuangdao, China, 18–20 September 2015; pp. 715–718. [Google Scholar]
- Zhendong, M.; Jinghai, Y. Mobile Healthcare System for Driver Based on Drowsy Detection Using EEG Signal Analysis. Metall. Min. Ind. 2015, 4, 34–38. [Google Scholar]
- Nugraha, B.T.; Sarno, R.; Asfani, D.A.; Igasaki, T.; Munawar, M.N. Classification of Driver Fatigue State Based on Eeg Using Emotiv Epoc+. J. Theor. Appl. Inf. Technol. 2016, 86, 54–60. [Google Scholar]
- Hu, J. Automated Detection of Driver Fatigue Based on AdaBoost Classifier with EEG Signals. Front. Comput. Neurosci. 2017, 11, 72. [Google Scholar] [CrossRef] [Green Version]
- Min, J.; Wang, P.; Hu, J. Driver fatigue detection through multiple entropy fusion analysis in an EEG-based system. PLoS ONE 2017, 12, e0188756. [Google Scholar] [CrossRef] [Green Version]
- Cai, Q.; Gao, Z.-K.; Yang, Y.-X.; Dang, W.-D.; Grebogi, C. Multiplex Limited Penetrable Horizontal Visibility Graph from EEG Signals for Driver Fatigue Detection. Int. J. Neural Syst. 2019, 29, 1850057. [Google Scholar] [CrossRef] [Green Version]
- Luo, H.; Qiu, T.; Liu, C.; Huang, P. Research on fatigue driving detection using forehead EEG based on adaptive multi-scale entropy. Biomed. Signal Process. Control 2019, 51, 50–58. [Google Scholar] [CrossRef]
- Gao, Z.-K.; Li, Y.-L.; Yang, Y.-X.; Ma, C. A recurrence network-based convolutional neural network for fatigue driving detection from EEG. Chaos Interdiscip. J. Nonlinear Sci. 2019, 29, 113126. [Google Scholar] [CrossRef] [PubMed]
- Jackson, C. The Chalder Fatigue Scale (CFQ 11). Occup. Med. 2014, 65, 86. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sheykhivand, S.; Rezaii, T.Y.; Meshgini, S.; Makoui, S.; Farzamnia, A. Developing a Deep Neural Network for Driver Fatigue Detection Using EEG Signals Based on Compressed Sensing. Sustainability 2022, 14, 2941. [Google Scholar] [CrossRef]
- Craig, A.; Tran, Y.; Wijesuriya, N.; Nguyen, H. Regional brain wave activity changes associated with fatigue. Psychophysiology 2012, 49, 574–582. [Google Scholar] [CrossRef] [PubMed]
- Desai, R.; Tailor, A.; Bhatt, T. Effects of yoga on brain waves and structural activation: A review. Complementary Ther. Clin. Pract. 2015, 21, 112–118. [Google Scholar] [CrossRef]
- Ellis, R.S. Entropy, Large Deviations, and Statistical Mechanics; Taylor & Francis: Abingdon, UK, 2006; Volume 1431. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Hung, S.-L.; Adeli, H. Parallel backpropagation learning algorithms on Cray Y-MP8/864 supercomputer. Neurocomputing 1993, 5, 287–302. [Google Scholar] [CrossRef]
- Hinton, G.E.; Srivastava, N.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R.R. Improving neural networks by preventing co-adaptation of feature detectors. arXiv 2012, arXiv:1207.0580. [Google Scholar]
- Graves, A. Generating sequences with recurrent neural networks. arXiv 2013, arXiv:1308.0850. [Google Scholar]
- Mousavi, Z.; Rezaii, T.Y.; Sheykhivand, S.; Farzamnia, A.; Razavi, S. Deep convolutional neural network for classification of sleep stages from single-channel EEG signals. J. Neurosci. Methods 2019, 324, 108312. [Google Scholar] [CrossRef] [PubMed]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Mousavi, Z.; Ettefagh, M.M.; Sadeghi, M.H.; Razavi, S.N. Developing deep neural network for damage detection of beam-like structures using dynamic response based on FE model and real healthy state. Appl. Acoust. 2020, 168, 107402. [Google Scholar] [CrossRef]
- Mousavi, Z.; Varahram, S.; Ettefagh, M.M.; Sadeghi, M.H.; Razavi, S.N. Deep neural networks–based damage detection using vibration signals of finite element model and real intact state: An evaluation via a lab-scale offshore jacket structure. Struct. Health Monit. 2021, 20, 379–405. [Google Scholar] [CrossRef]
- Sheykhivand, S.; Mousavi, Z.; Rezaii, T.Y.; Farzamnia, A. Recognizing Emotions Evoked by Music Using CNN-LSTM Networks on EEG Signals. IEEE Access 2020, 8, 139332–139345. [Google Scholar] [CrossRef]
- Sheykhivand, S.; Mousavi, Z.; Mojtahedi, S.; Rezaii, T.Y.; Farzamnia, A.; Meshgini, S.; Saad, I. Developing an efficient deep neural network for automatic detection of COVID-19 using chest X-ray images. Alex. Eng. J. 2021, 60, 2885–2903. [Google Scholar] [CrossRef]
- Sheykhivand, S.; Rezaii, T.Y.; Mousavi, Z.; Delpak, A.; Farzamnia, A. Automatic Identification of Epileptic Seizures from EEG Signals Using Sparse Representation-Based Classification. IEEE Access 2020, 8, 138834–138845. [Google Scholar] [CrossRef]
- Yousefi Rezaii, T.; Sheykhivand, S.; Mousavi, Z.; Meshini, S. Automatic stage scoring of single-channel sleep EEG using CEEMD of genetic algorithm and neural network. Comput. Intell. Electr. Eng. 2018, 9, 15–28. [Google Scholar]
- Sheykhivand, S.; Rezaii, T.Y.; Saatlo, A.N.; Romooz, N. Comparison between different methods of feature extraction in BCI systems based on SSVEP. Int. J. Ind. Math. 2017, 9, 341–347. [Google Scholar]
- Borghini, G.; Vecchiato, G.; Toppi, J.; Astolfi, L.; Maglione, A.; Isabella, R.; Caltagirone, C.; Kong, W.; Wei, D.; Zhou, Z.; et al. Assessment of mental fatigue during car driving by using high resolution EEG Activity and Neurophysiologic Indices. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; pp. 6442–6445. [Google Scholar]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environment and different working load. Mech. Syst. Signal Process. 2018, 100, 439–453. [Google Scholar] [CrossRef]
- Salakhutdinov, R.; Larochelle, H. In Efficient learning of deep Boltzmann machines. In Proceedings of the Thirteenth International Conference on Artificial Intelligence and Statistics, Sardinia, Italy, 13–15 May 2010; pp. 693–700. [Google Scholar]
- Hsu, Y.-L.; Yang, Y.-T.; Wang, J.-S.; Hsu, C.-Y. Automatic sleep stage recurrent neural classifier using energy features of EEG signals. Neurocomputing 2013, 104, 105–114. [Google Scholar] [CrossRef]
- Sabahi, K.; Sheykhivand, S.; Mousavi, Z.; Rajabioun, M. Recognition Covid-19 cases using deep type-2 fuzzy neural networks based on chest X-ray image. Comput. Intell. Electr. Eng. 2022, 87, 25–36. [Google Scholar]
- Fedala, S.; Rémond, D.; Zegadi, R.; Felkaoui, A. Contribution of angular measurements to intelligent gear faults diagnosis. J. Intell. Manuf. 2015, 29, 1115–1131. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Padding | Number of Filters | Strides | Size of Filter and Pooling | Output Shape | Activation | Layer Type | L |
|---|---|---|---|---|---|---|---|
| Function | |||||||
| Yes | 16 | 8 × 1 | 128 × 1 | (None, 625, 16) | Leaky-ReLU | Convolution1-D | 0–1 |
| No | - | 2 × 1 | 2 × 1 | (None, 312, 16) | - | Max Pooling1-D | 1–2 |
| Yes | 32 | 1 × 1 | 3 × 1 | (None, 312, 32) | Leaky-ReLU | Convolution1-D | 2–3 |
| No | - | 2 × 1 | 2 × 1 | (None, 156, 32) | - | Max Pooling1-D | 3–4 |
| Yes | 64 | 1 × 1 | 3 × 1 | (None, 156, 64) | Leaky-ReLU | Convolution1-D | 4–5 |
| No | - | 2 × 1 | 2 × 1 | (None, 78, 64) | - | Max Pooling1-D | 5–6 |
| Yes | 64 | 1 × 1 | 3 × 1 | (None, 78, 64) | Leaky-ReLU | Convolution1-D | 6–7 |
| No | - | 2 × 1 | 2 × 1 | (None, 39, 64) | - | Max Pooling1-D | 7–8 |
| Yes | 64 | 1 × 1 | 3 × 1 | (None, 39, 64) | Leaky-ReLU | Convolution1-D | 8–9 |
| No | - | 2 × 1 | 2 × 1 | (None, 19, 64) | - | Max Pooling1-D | 9–10 |
| Yes | 64 | 1 × 1 | 3 × 1 | (None, 19, 64) | Leaky-ReLU | Convolution1-D | 10–11 |
| No | - | 2 × 1 | 2 × 1 | (None, 9, 64) | - | Max Pooling1-D | 11–12 |
| Yes | 64 | 1 × 1 | 3 × 1 | (None, 9, 64) | Leaky-ReLU | Convolution1-D | 12–13 |
| No | - | 2 × 1 | 2 × 1 | (None, 4, 64) | - | Max Pooling1-D | 13–14 |
| - | - | - | - | (None, 128) | Leaky-ReLU | LSTM | 14–15 |
| - | - | - | - | (None, 128) | Leaky-ReLU | LSTM | 15–16 |
| - | - | - | - | (None, 128) | Leaky-ReLU | LSTM | 16–17 |
| - | - | - | - | (None, 100) | Leaky-ReLU | FC | 17–18 |
| - | - | - | - | (None, 2) | SoftMax | FC | 18–19 |
| Region | A | B | C | D | E | F |
|---|---|---|---|---|---|---|
| Kappa | 0.98 | 0.96 | 0.97 | 0.96 | 0.98 | 0.92 |
| Research | Feature Method | Accuracy (%) |
|---|---|---|
| Correa et al. [16] | Multimodal Analysis | 83 |
| Xiong et al. [17] | Attitudinal Entropy and State Entropy | 90 |
| Chai et al. [18] | Entropy Rate Bound Minimization Analysis | 88.2 |
| Zhang et al. [19] | Entropy and Complexity Measure | 96.5 |
| Yin et al. [20] | Fuzzy Entropy | 95 |
| Ko et al. [21] | Fast Fourier Transform | 90 |
| Wang et al. [22] | Power Spectral Density | 83 |
| Mu et al. [23] | EEG Frequency Ratio | 85 |
| Nugraha et al. [24] | EMOTIV | 96 |
| Hu et al. [25] | Multiple Entropy | 97.5 |
| Min et al. [26] | Multiple Entropy | 98.3 |
| Cai et al. [27] | Horizontal Visibility Graph | 98 |
| Luo et al. [28] | Adaptive Scaling Factor and Multiple Entropy | 95 |
| Gao et al. [29] | Convolutional Neural Network | 95 |
| Proposed Method | Convolutional Neural Network–Long Short-Term Memory | 99.23 |
| Methods | Feature Learning from Raw Data | Manual Features |
|---|---|---|
| Proposed Method | 98.78% | 80.35% |
| Convolutional Neural Network | 90.26% | 80.64% |
| Deep Boltzmann Machine | 84.82% | 77.78% |
| Multi-Layer Perceptron | 73.45% | 79.83% |
| Methods | Proposed Method | Convolutional Neural Network | Deep Boltzmann Machine | Multilayer Perceptron | ||||
|---|---|---|---|---|---|---|---|---|
| Region | Train | Test | Train | Test | Train | Test | Train | Test |
| A | 1890 s | 5 s | 1030 s | 3 s | 911 s | 4.5 s | 100 s | 2.5 s |
| B | 1870 s | 5 s | 1011 s | 3.5 s | 801 s | 4.5 s | 82 s | 2 s |
| C | 1820 s | 4 s | 1100 s | 4 s | 800 s | 4 s | 80 s | 1.5 s |
| D | 1892 s | 4.5 s | 1008 s | 3 s | 810 s | 4 s | 77 s | 1.5 s |
| E | 1800 s | 4 s | 1002 s | 3 s | 680 s | 3.5 s | 67 s | 1 s |
| F | 1810 s | 4.5 s | 1004 s | 3.5 | 672 s | 3 s | 79 s | 2 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheykhivand, S.; Rezaii, T.Y.; Mousavi, Z.; Meshgini, S.; Makouei, S.; Farzamnia, A.; Danishvar, S.; Teo Tze Kin, K. Automatic Detection of Driver Fatigue Based on EEG Signals Using a Developed Deep Neural Network. Electronics 2022, 11, 2169. https://doi.org/10.3390/electronics11142169
Sheykhivand S, Rezaii TY, Mousavi Z, Meshgini S, Makouei S, Farzamnia A, Danishvar S, Teo Tze Kin K. Automatic Detection of Driver Fatigue Based on EEG Signals Using a Developed Deep Neural Network. Electronics. 2022; 11(14):2169. https://doi.org/10.3390/electronics11142169
Chicago/Turabian StyleSheykhivand, Sobhan, Tohid Yousefi Rezaii, Zohreh Mousavi, Saeed Meshgini, Somaye Makouei, Ali Farzamnia, Sebelan Danishvar, and Kenneth Teo Tze Kin. 2022. "Automatic Detection of Driver Fatigue Based on EEG Signals Using a Developed Deep Neural Network" Electronics 11, no. 14: 2169. https://doi.org/10.3390/electronics11142169
APA StyleSheykhivand, S., Rezaii, T. Y., Mousavi, Z., Meshgini, S., Makouei, S., Farzamnia, A., Danishvar, S., & Teo Tze Kin, K. (2022). Automatic Detection of Driver Fatigue Based on EEG Signals Using a Developed Deep Neural Network. Electronics, 11(14), 2169. https://doi.org/10.3390/electronics11142169