In simulation experiments, an office scene and a villa scene with multiple obstacles are used to test the proposed algorithm. The first four subsections are based on the bedroom scene for experiments and analysis, and the last subsection uses the villa scene to fully verify the robustness and superiority of the proposed algorithm.
The simulation platform is the Matlab platform + Pytorch. The Matlab version is 2021B, the PyTorch version is 1.9.1+cuda11.1, the computer hardware platform is Intel(R) Core(TM) i5- 7200U CPU @ 2.50 GHz, the memory is 8 GB, and the graphics card is Tesla K80 (11 GB video memory). Other parts are completed on the Matlab platform, except for the construction, training, and prediction of the fingerprint positioning network.
6.1. Simulation Structure of the Bedroom Scene
The scene contains both line-of-sight and non-line-of-sight propagation paths, which can be used to verify the effectiveness of the fusion algorithm in this paper. The signal will produce more severe multipath interference and shadow fading in this scenario. This scenario can prove that the algorithm can still achieve better positioning accuracy under the multiple interferences of complex scenarios.
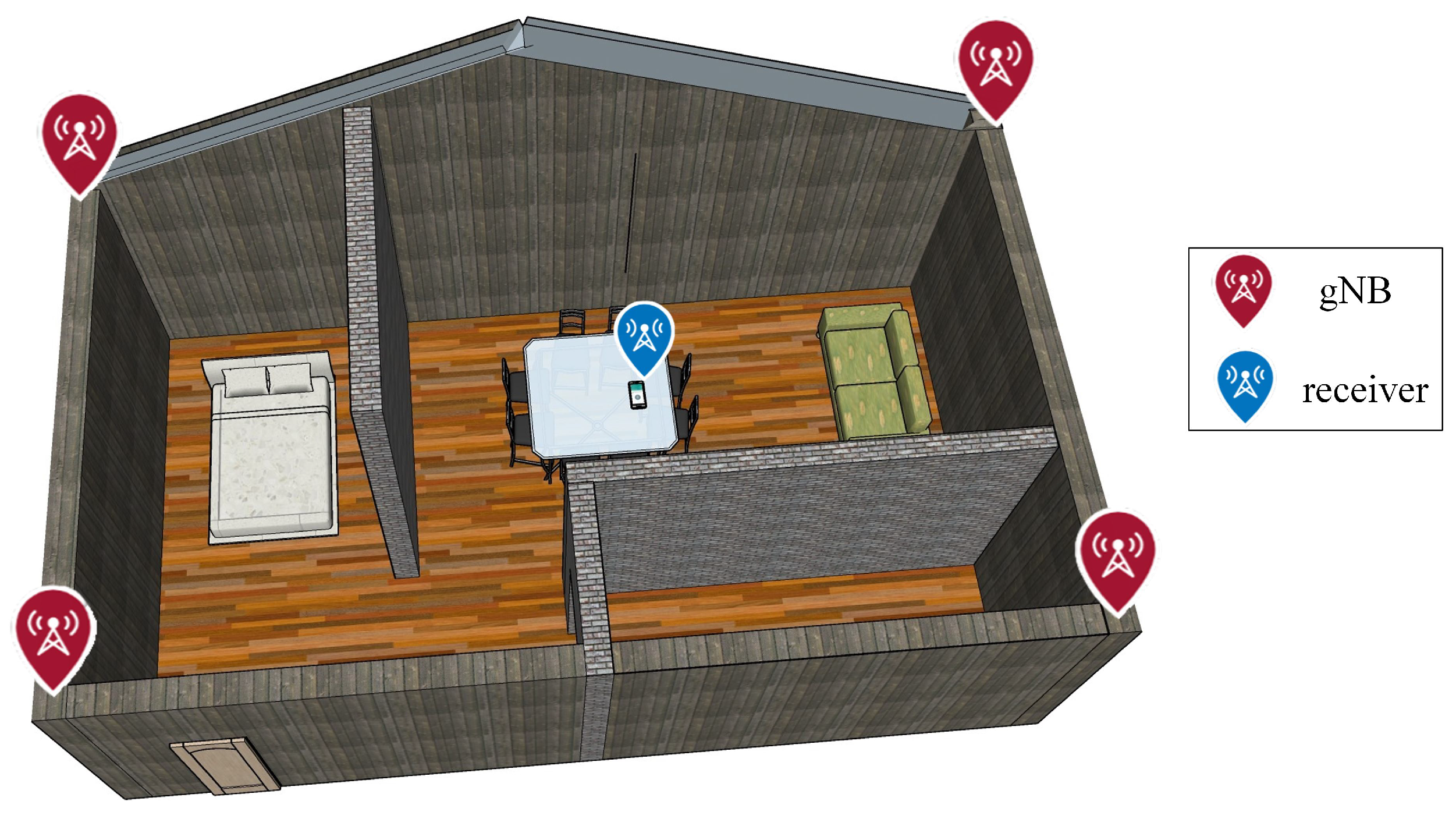
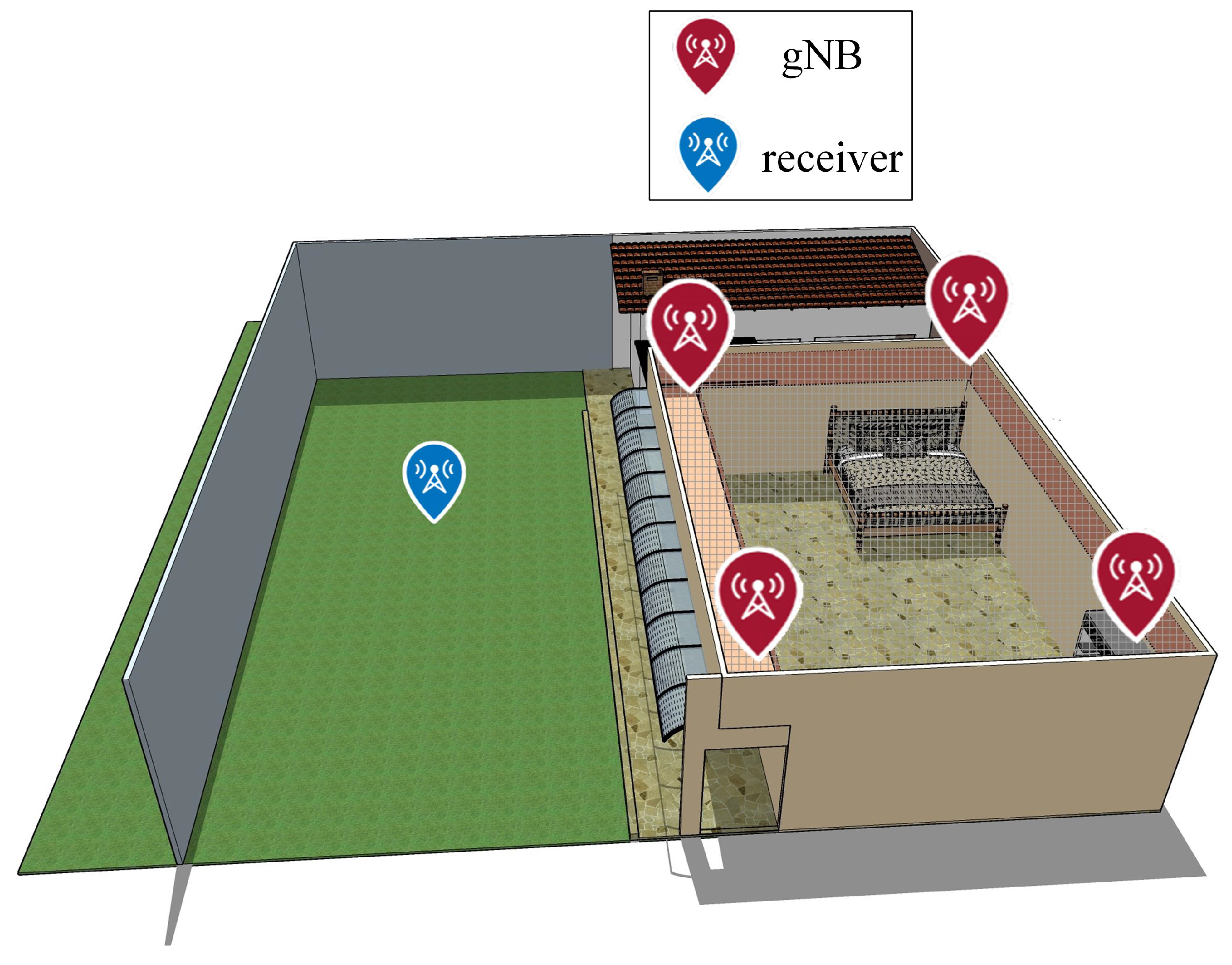
The experimental simulation data in this paper are all carried out on the Matlab platform. Assume that the room model’s length, width, and height are 10 m, 6 m, and 2 m, respectively. The house wall material is brick, the floor material is wood, and the base stations are distributed around the house. At the same time, the influence of the macro base station on the received signal is not considered because the macro base station is far away from the receiving device. The interference effect of the macro base station can be removed through a specific filtering algorithm.
The three-dimensional structure of the simulated structure is shown in
Figure 7. In this experiment, the four micro base stations built are distributed in the four corners of the building.
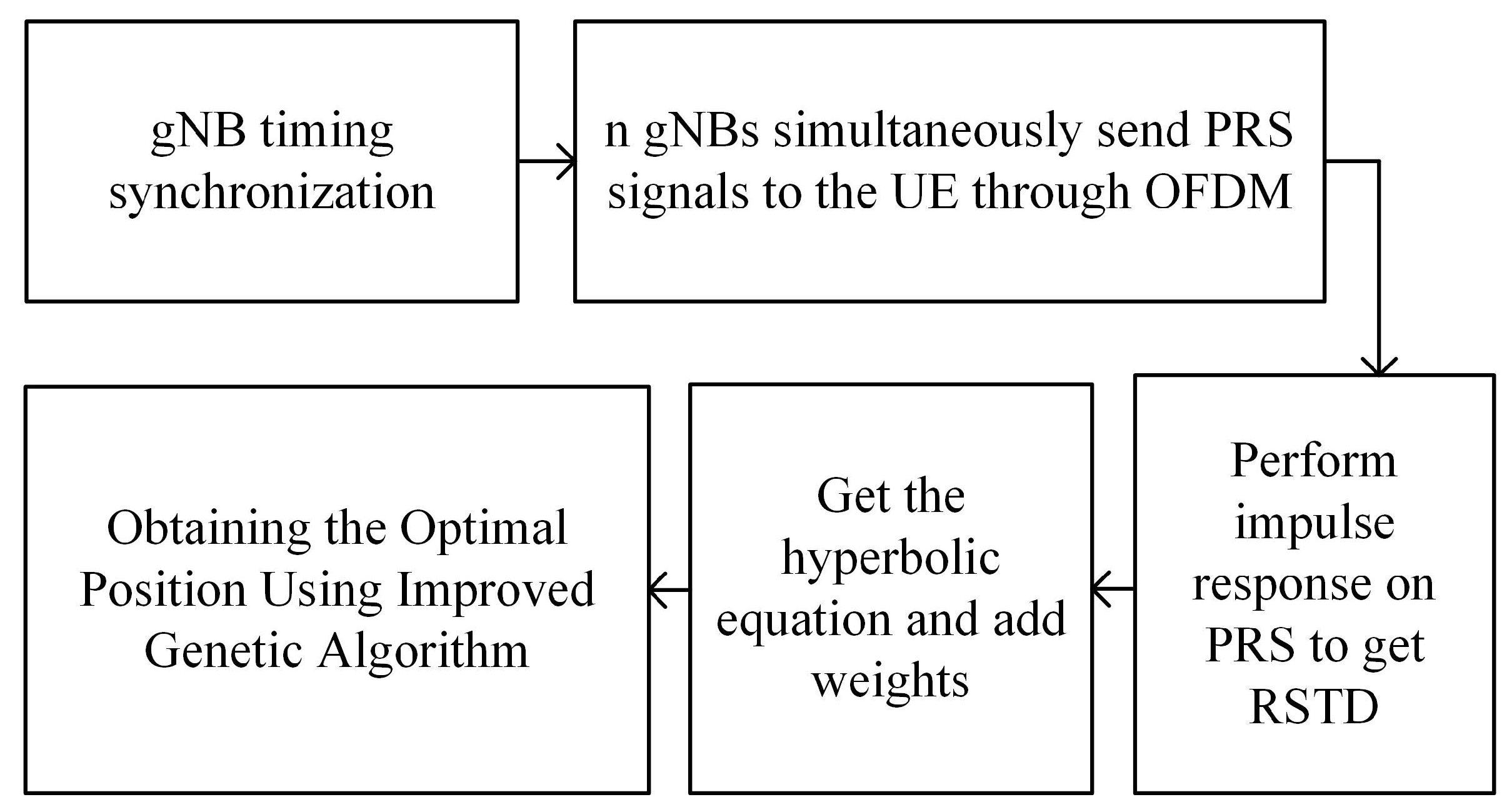
6.2. Hyperbolic Positioning Algorithm
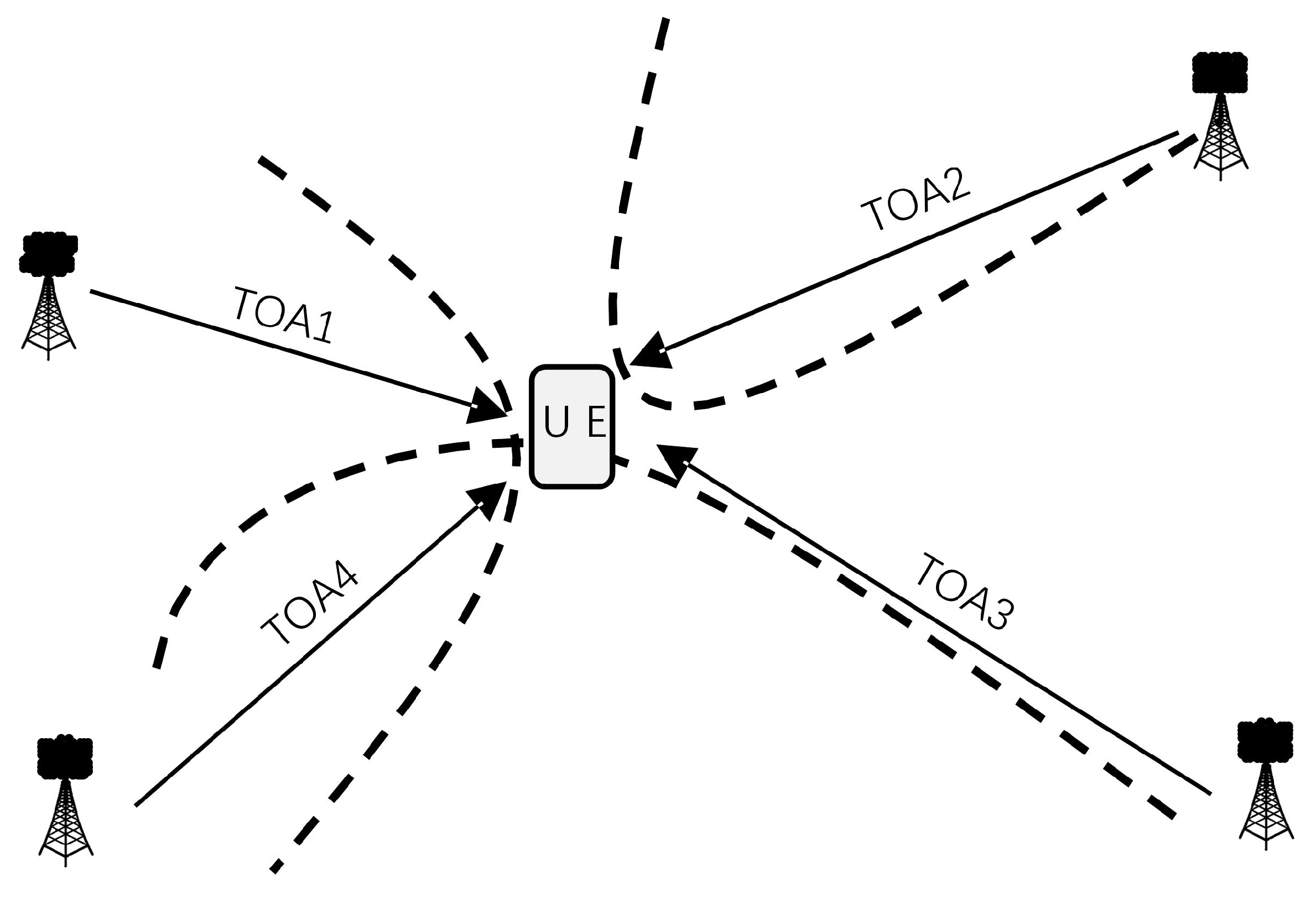
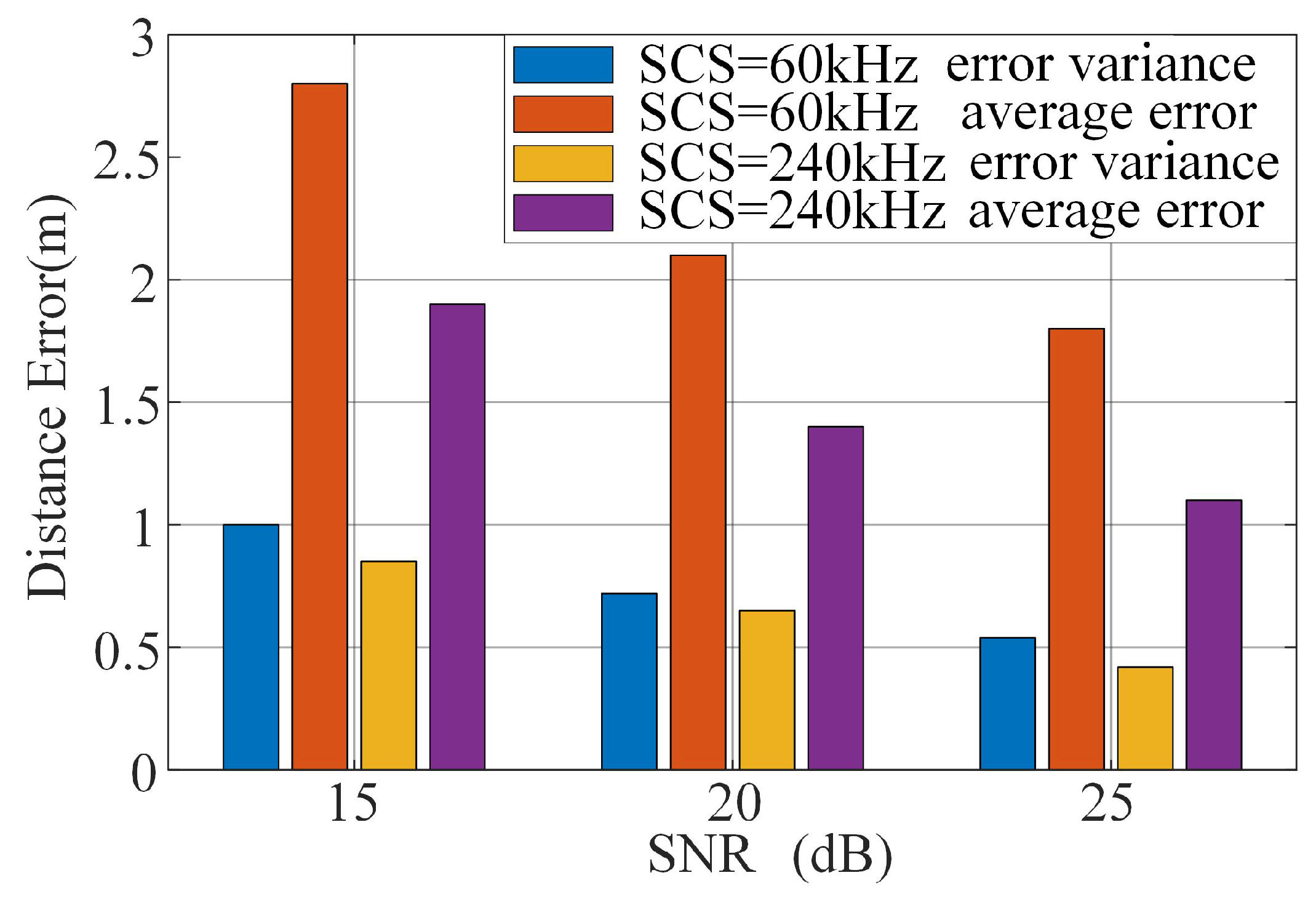
In the hyperbolic positioning process, as the power of the noise is increased, this line-of-sight-based method will reduce the accuracy with the decrease of the signal-to-noise ratio and the interference of multipath propagation. At the same time, because different values of SCS in 5G will cause different degrees of sampling errors, the hyperbolic positioning algorithm is used alone in the experiment, using the signal-to-noise ratio and SCS of the UE received signal as variables for comparison experiments.
Figure 8 below shows the error of hyperbolic positioning in different SCS and SNR environments.
It can be seen that both SCS and the signal-to-noise ratio have a positive feedback effect on the final positioning accuracy. Larger OFDM sub-carrier spacing can be used in the millimeter-wave frequency band to ensure a higher sampling rate. In the experiment, white Gaussian noise was added to reduce the signal-to-noise ratio for comparative experiments. The experimental results show that the proposed hyperbolic positioning algorithm has higher accuracy than the traditional positioning method based on the visible propagation path.
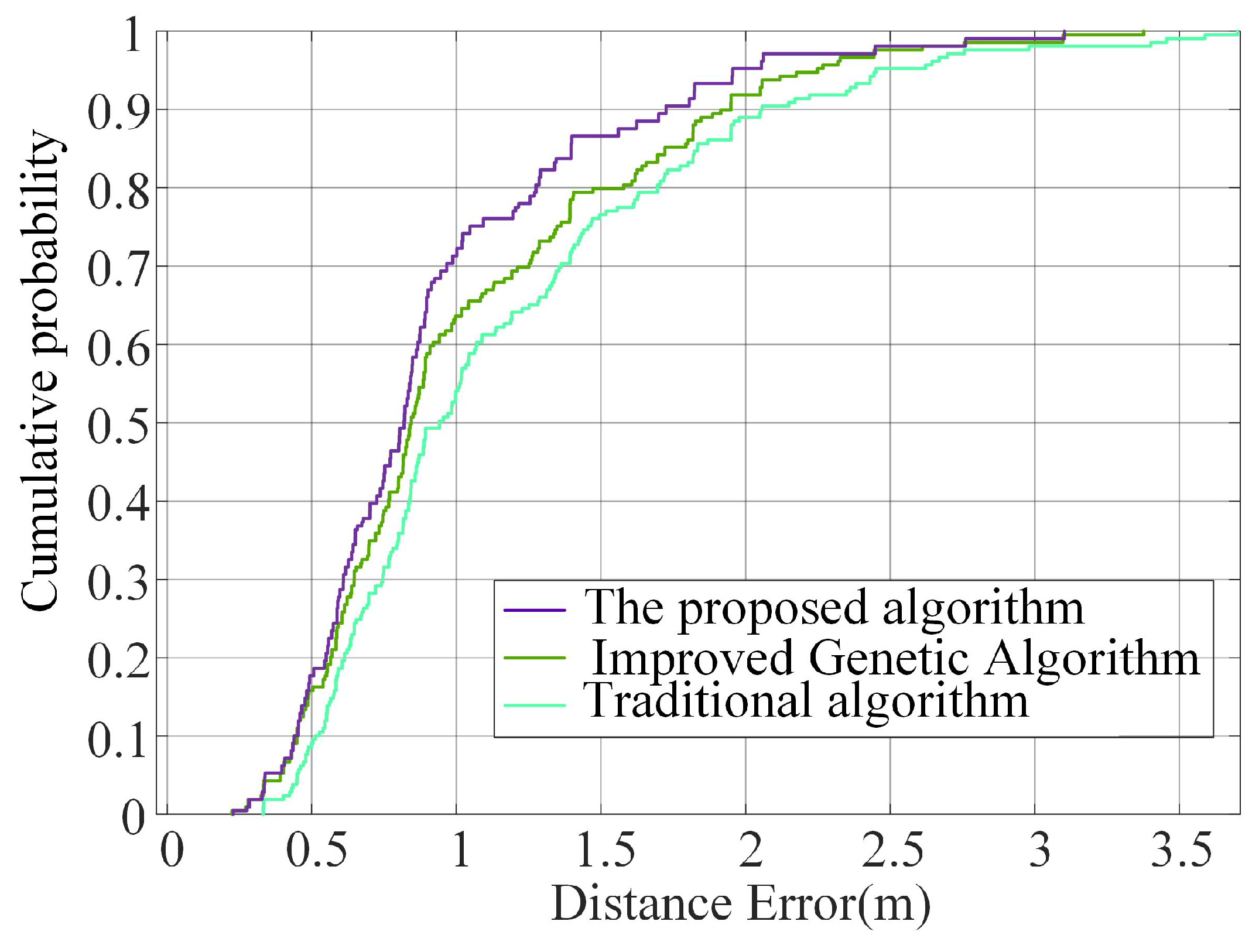
At the same time, in order to verify the improvement of the improved genetic algorithm and the weighted hyperbolic algorithm on the positioning accuracy, the proposed algorithm is compared with the improved genetic algorithm and the traditional algorithm, and three algorithms are used for 200 sample points respectively. The cumulative error curve is shown in
Figure 9.
The use of the improved genetic algorithm is still due to the different distance errors generated by base stations with different distances, resulting in different contributions of the corresponding hyperbola to the final positioning accuracy, and higher accuracy cannot be achieved. The weighted hyperbolic algorithm based on the improved genetic algorithm solves this problem and achieves higher positioning accuracy.
6.3. Fingerprint Positioning Algorithm
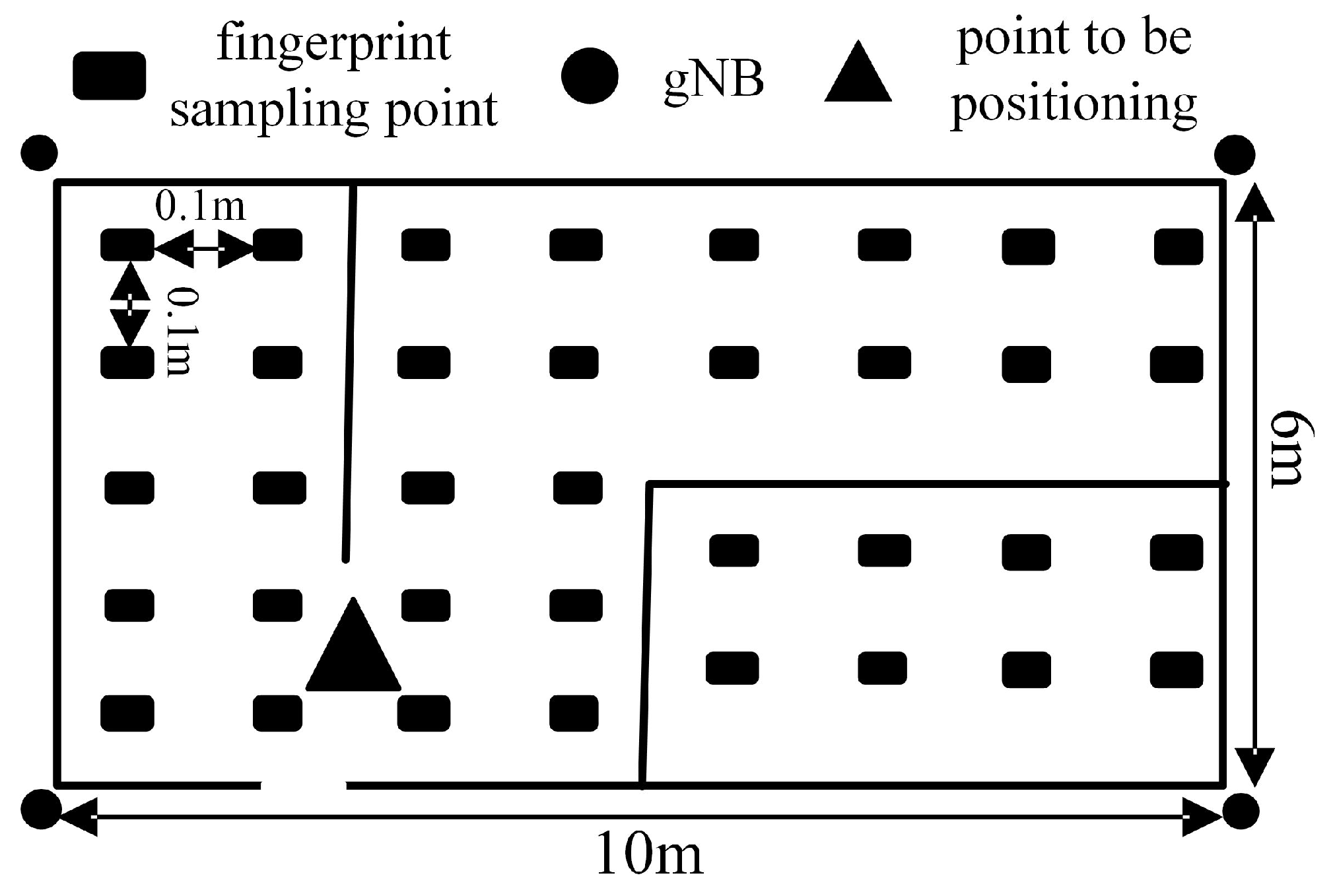
The establishment of the fingerprint database in the offline phase is shown in
Figure 10. The figure shows the situation that the UE receives four base station signals. In actual cases, the 5G communication system will establish dense network nodes, thereby forming the deployment of ultra-dense cells, enriching the amount of information in the fingerprint sample. The sampling interval of fingerprint samples in the fingerprint positioning algorithm is 0.1 m. In an office environment with a length of 10 m and a width of 6 m, the fingerprint sample database contains 6000 sample points.
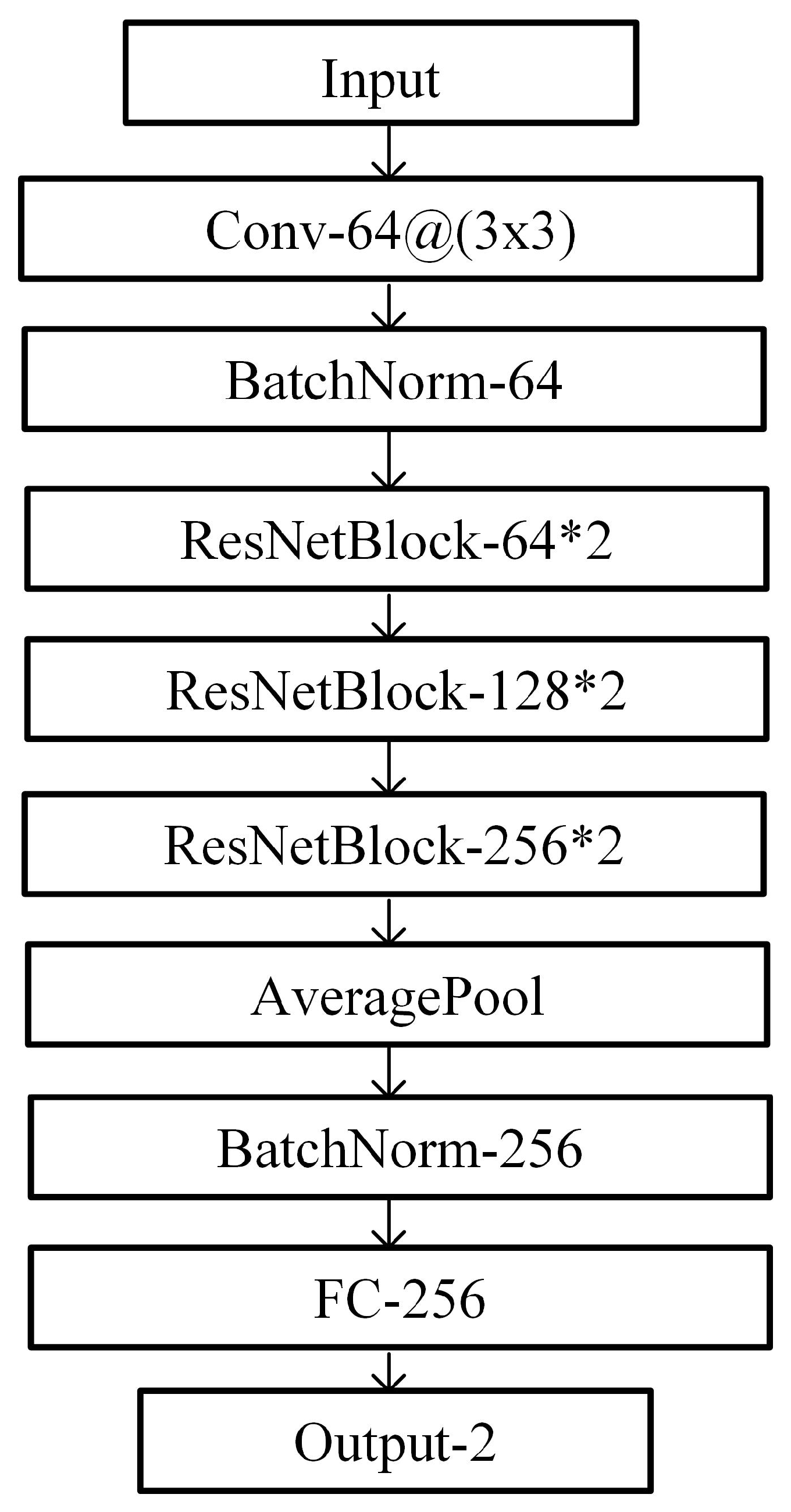
In using the fingerprint positioning algorithm alone, selecting the model is essential. This algorithm mainly considers the following four network models: SVM, Multi-Layer Perceptron (MLP), Convolutional Neural Network (CNN), and Residual Network (ResNet). Based on the advantages and disadvantages of SVM, MLP, and CNN, the improved ResNet-18 is selected as the network model of the fingerprint algorithm.
In the experiment using the fingerprint positioning algorithm alone, the fingerprint database is divided into the training set and test set according to 80%. At the same time, several sets of comparative experiments were carried out with other network models. The mean square loss function was employed in all of the loss functions. The final experimental results are shown in
Table 2.
It can be seen from
Table 2 that the proposed network model is the most suitable because it has higher accuracy, better generalization performance, and lower model complexity. The improved ResNet in this paper is used as the fingerprint positioning stage. At the same time, the ResNet model in this algorithm can ensure lower prediction delays.
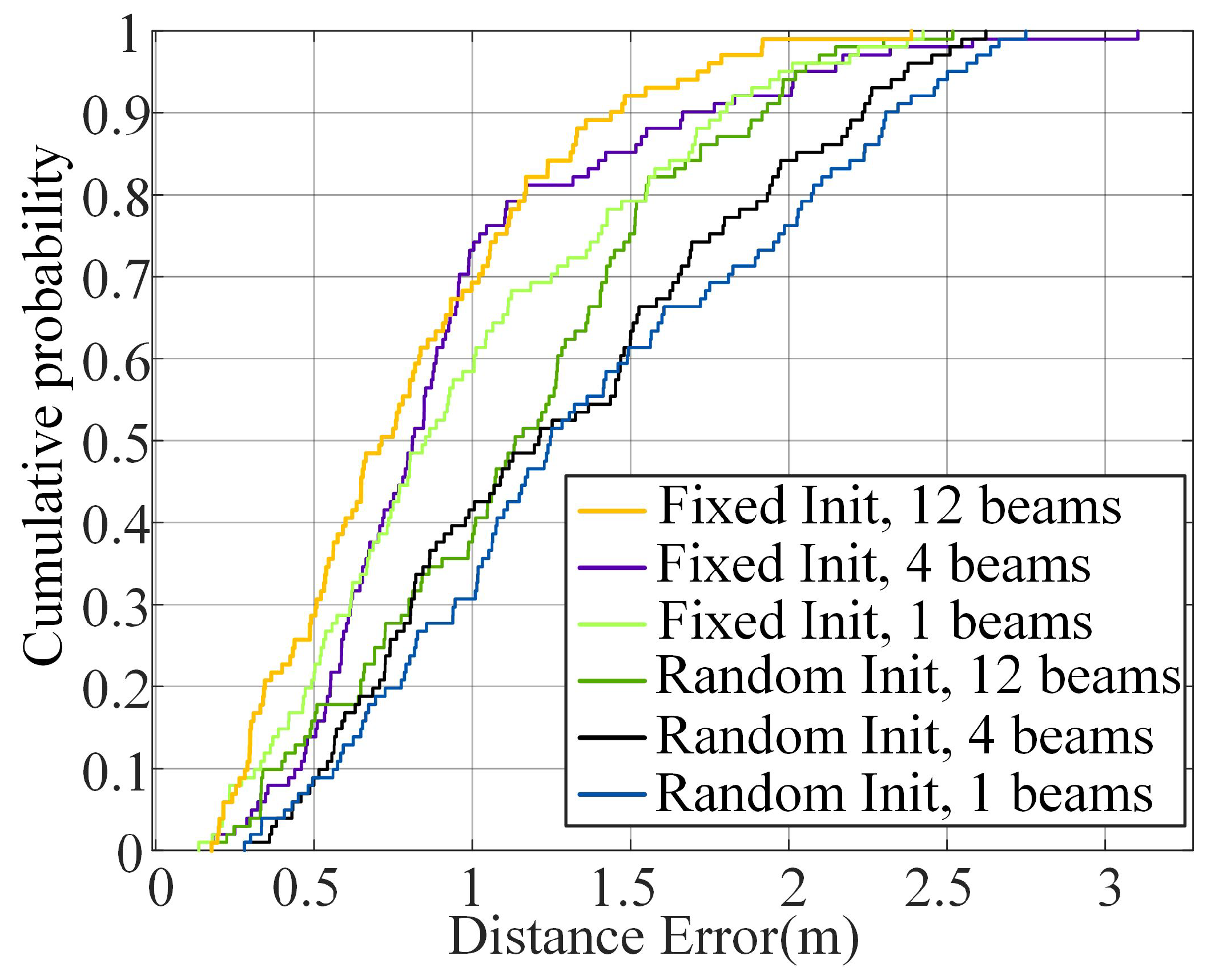
To further verify that the multi-beam CSI-RS signal in the proposed algorithm can provide rich information for fingerprints and at the same time prove that the fixed beam initialization can improve the accuracy of fingerprint positioning,
Figure 11 shows the accumulation of positioning errors when 12 beams, four beams, and a single beam are used as fingerprint samples in the case of beam fixed initialization and random initialization.
It can be seen that the multi-beam fingerprint CSI-RS fingerprint can significantly improve the prediction accuracy when the beam direction is fixed and initialized.
6.4. Fusion of Fingerprint and Hyperbolic Algorithm in Bedroom Scene
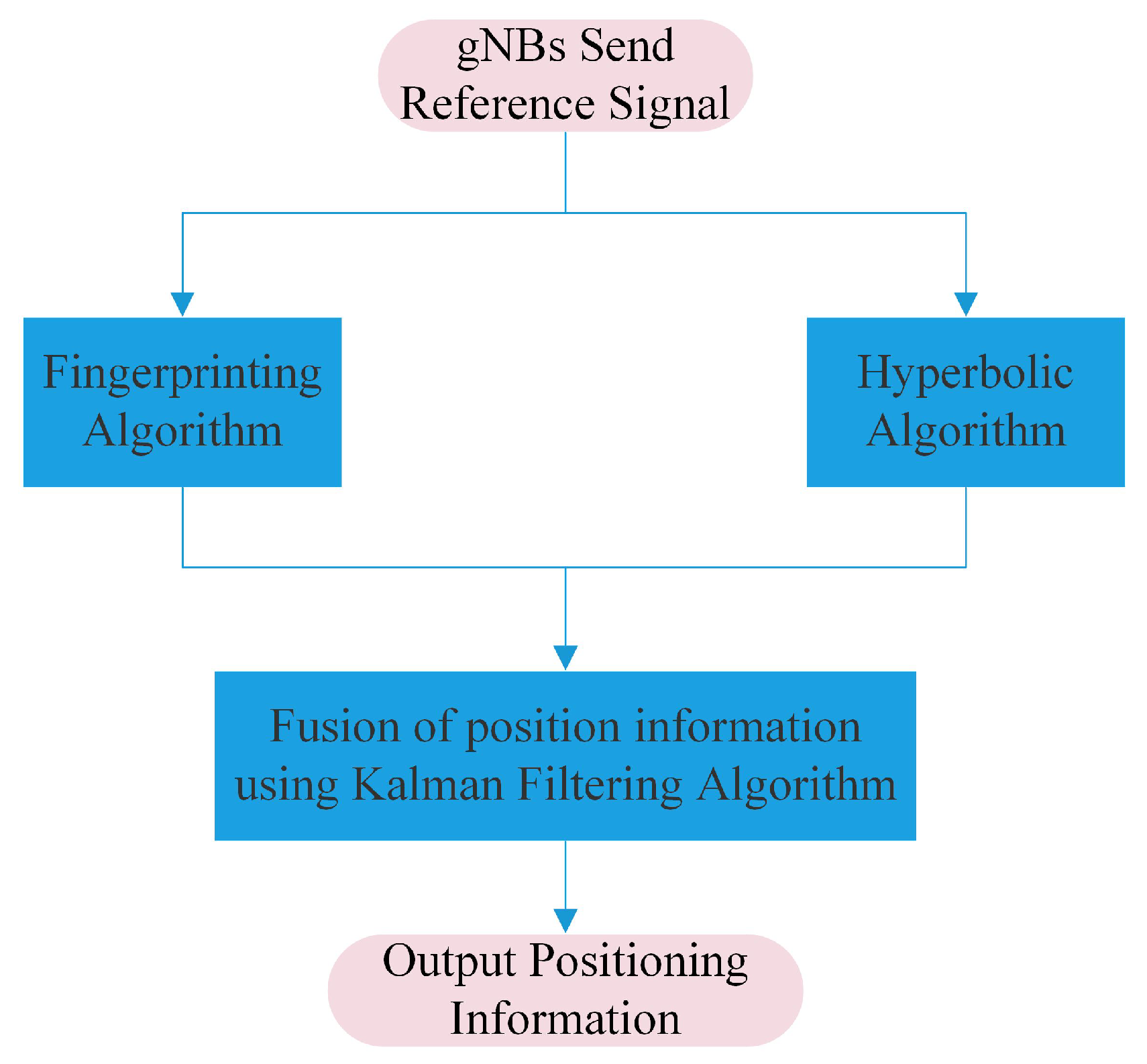
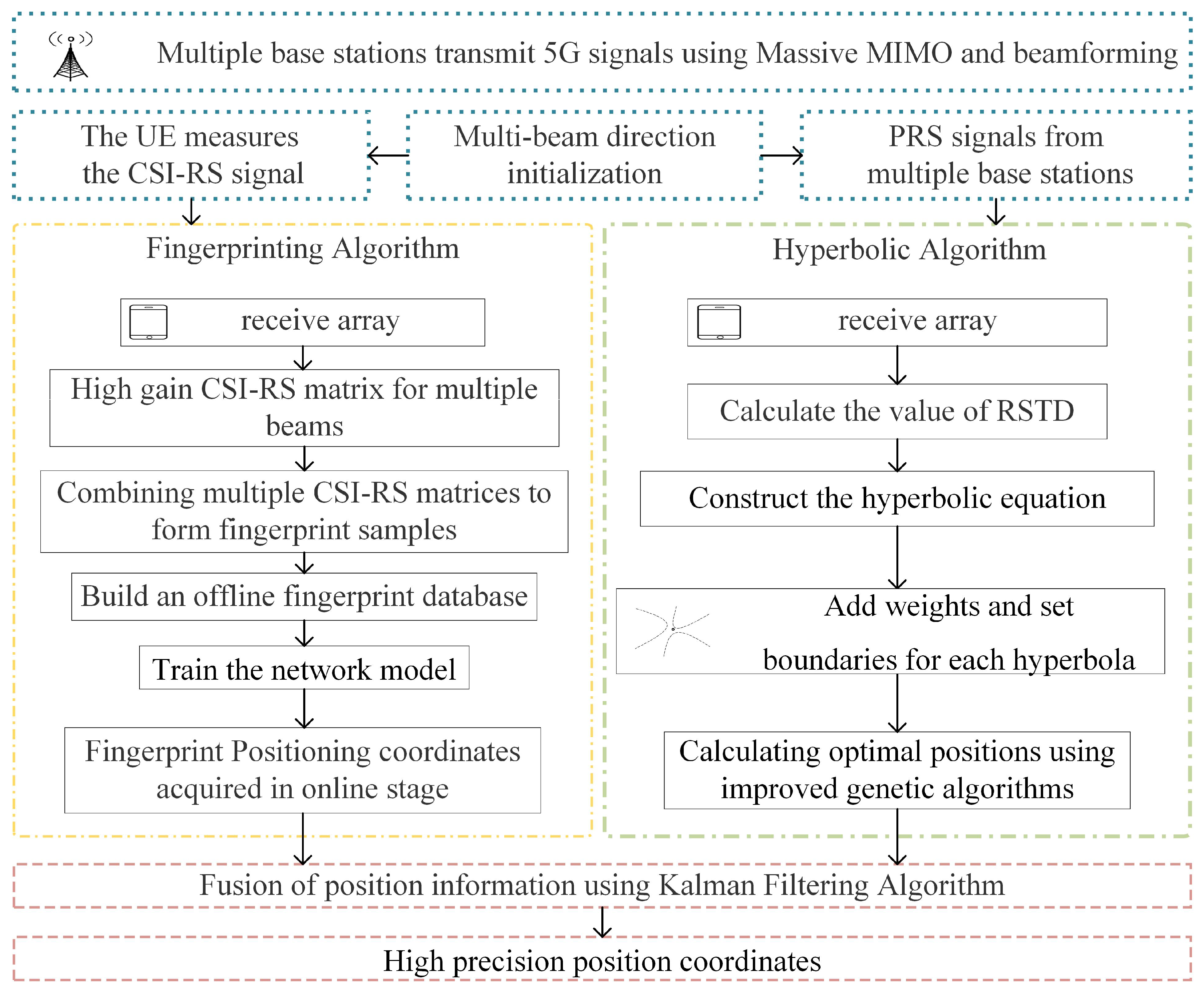
During fusion positioning, the UE to be positioned first collects the fingerprint information of the current position and then inputs the fingerprint information into the trained network to predict the position coordinates of the fingerprint positioning. At the same time, using the feedback of the PRS signal, we execute the hyperbolic positioning algorithm to obtain another set of location coordinates. Finally, the two sets of coordinates and the corresponding distance error probability density distribution function are used as the input of the Kalman filter to perform Kalman filtering to obtain accurate two-dimensional position information. The experiment found that under 5G communication, the multi-beam set fingerprint can still achieve high positioning accuracy within the non-visible distance range in a complex environment. Still, the fingerprint algorithm will produce the problem of range error in fingerprint matching when the environment changes significantly. The proposed hyperbolic positioning algorithm has high accuracy under the visible distance. Still, there is a problem that the accuracy will be reduced due to the multipath propagation phenomenon when there is severe occlusion. However, the distance error probability density distribution function of the two algorithms has high independence, which means that the two algorithms can complement each other. The fusion of the two algorithms will significantly improve the positioning accuracy.
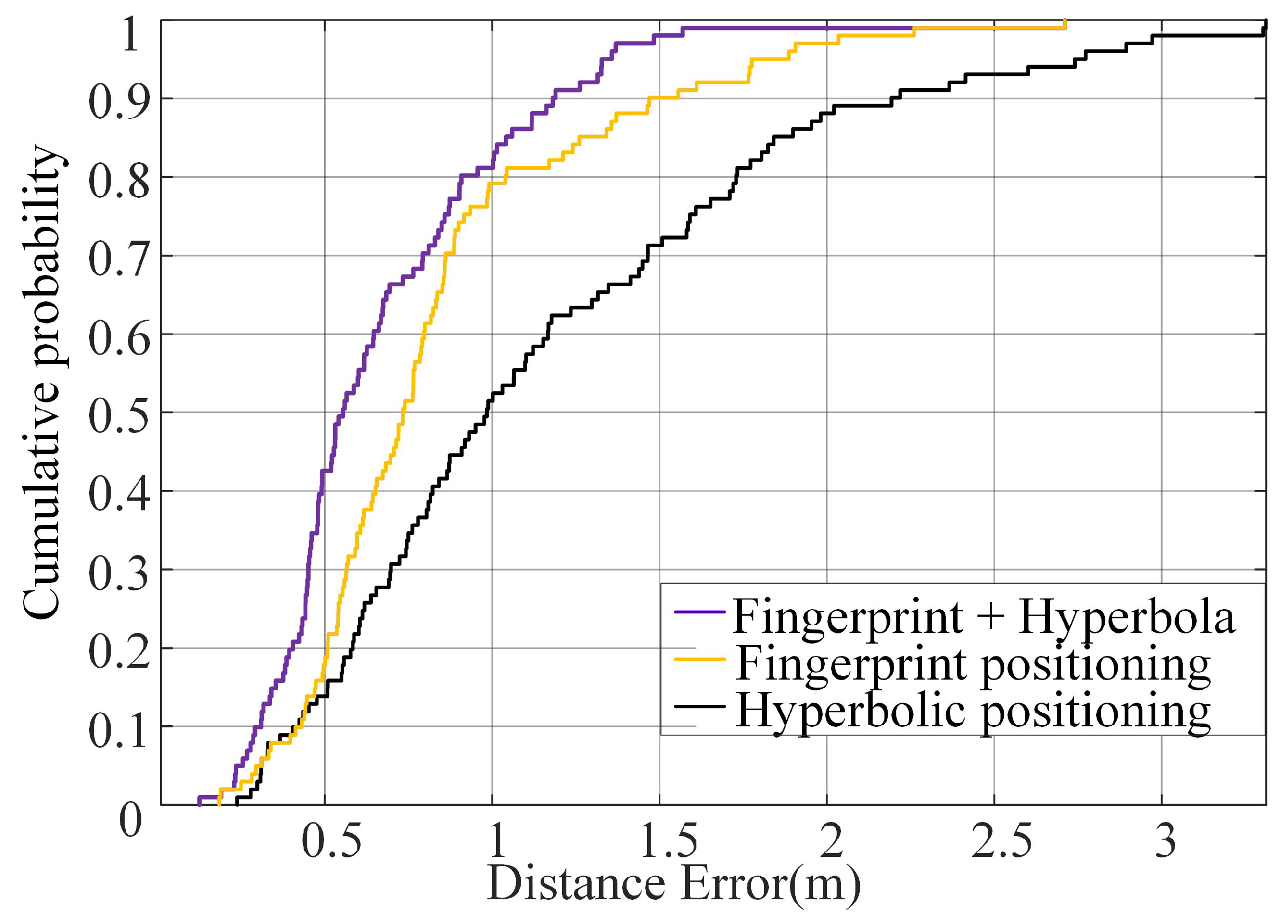
In the simulation experiment, the algorithm of this paper is executed at the same random position in each experiment. Each group has 180 sampling points, and a total of eight experiments are carried out. Finally, the average value was used to calculate the cumulative probability of distance error. The results are shown in
Table 3 and
Figure 12.
Combining
Figure 12 with
Table 2, in
Table 3, it can be seen that in complex indoor scenes such as offices, a severe multipath effect will decrease the positioning accuracy of hyperbolic positioning. However, the positioning situation of fingerprint positioning in complex scenes is relatively good. Still, when the indoor environment changes, the channel information of the changed position may change to a certain extent, resulting in errors in matching fingerprint information. However, after the two positioning results are fused by Kalman filter, the overall positioning accuracy was greatly optimized.
As shown in
Figure 13, comparative experiments were performed by simultaneously changing the number and location of gNBs. The experiment with only three gNBs was used as control group 1, the experiment with four randomly distributed gNBs was used as control group 2, and the experiment with six gNBs with uniform distribution was used as control group 3. The final positioning results are shown in
Table 4.
It can be seen that whether the distribution of gNB is random or regular does not have too much influence on the final positioning result, but it will change the positioning error distribution of the fingerprint algorithm and hyperbolic algorithm. However, using fewer gNBs means lower fingerprint sample resolution, so the positioning accuracy of the fingerprint positioning method will decrease slightly. Meanwhile, the hyperbolic positioning is affected by the number of gNBs. The more gNBs, the more the number of hyperbolic constraint equations, and the higher the accuracy. However, after the 5G ultra-dense network deployment is completed, the number of gNBs is sufficient. To ensure the positioning delay, an appropriate number of base stations should be used.
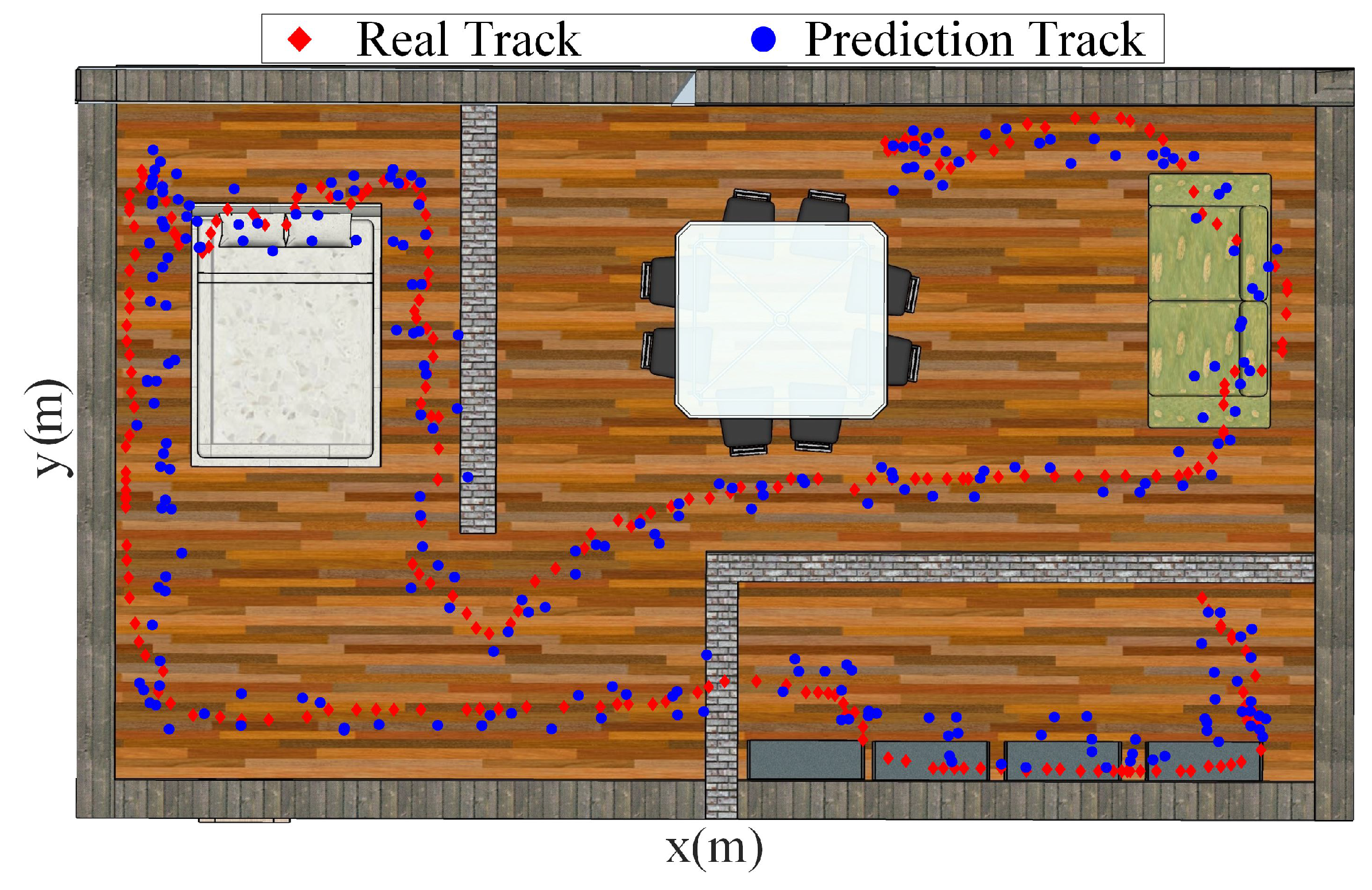
To further verify the algorithm’s effectiveness, we set a moving trajectory in the indoor environment and use the proposed algorithm to make predictions.
It can be seen from
Figure 14 that the proposed algorithm can be used to locate the moving target accurately. At the same time, because the SCS of 240 kHz is used to suppress the slight doppler effect caused by relative displacement, and because there is basically no high-speed movement in an indoor environment, this algorithm can suppress much doppler shift.
The comparison results between the positioning algorithm in this paper and the algorithm of multi-point positioning using wireless optical technology on the 5G platform in the literature [
5] and the 5G indoor positioning algorithm based on DELTA in the literature [
6] are shown in
Table 5.
It can be seen that compared with the other two algorithms, the algorithm in this paper has a significant improvement in both the average error and the maximum error, which proves that the algorithm in this paper has good positioning accuracy. The algorithm in this paper is also superior to the other two algorithms in robustness.
At the same time, the complexity of the algorithm is analyzed. The network model proposed in this paper takes into account the prediction accuracy and low model complexity. Convolutional layers and fully connected layers are less than 15 layers, and the amount of computation is small. In addition, the time complexity of the improved genetic algorithm in the hyperbolic algorithm is calculated. When the initial position population size is , the time complexity of the genetic algorithm is less than , so the fingerprint algorithm has a faster calculation speed than the hyperbolic algorithm; at the same time, the two algorithms are calculated in parallel, and only the running time of the hyperbolic algorithm needs to be considered.
In addition, the Kalman filter algorithm has high computational efficiency. When the dimension of the state matrix is
, the time complexity of calculating the Kalman gain can reach
. Therefore, the overall complexity is less than
, and the time consumption of positioning can also meet the requirements of low latency. The positioning method in the literature [
5] still relies on multi-point positioning in general, and the overall complexity is close to
, but it also involves the selection of visible light sources, so the positioning time is slightly higher than the algorithm. Without considering the establishment process of the 5G platform in the literature [
6], its calculation amount is mainly consumed in the calculation of the network model. The overall network structure is similar to MLP. It adopts a two-way three-hidden layer structure, and the number of hidden layer units is about 300, so the positioning stage takes more time.
6.5. Fusion of Fingerprint and Hyperbolic Algorithms in Villa Scene
As shown in
Figure 15, the experimental scene is replaced with a villa scene, and a courtyard and a hut without a base station are added in this scene to test the positioning effect in this scene with occlusion and lack of base stations.
At the same time, because the scene becomes larger, 500 sampling points are used, a total of eight experiments are carried out, and the average distance error is used as the final result. At the same time, we keep the four gNBs unchanged, so that it can be compared with the previous bedroom scene.
As shown in
Table 6, the proposed algorithm is still applicable in the villa scene with outdoor venues. At the same time, because the occlusion of the independent hut is serious, it is basically regarded as a non-line-of-sight scene, so the positioning accuracy is lower than that of the main house and courtyard, but it can still reach the m-level positioning accuracy. At the same time, it can be seen that the localization algorithm proposed in this paper can provide high localization accuracy in relatively small bedroom scenes and villa scenes with courtyards and independent cottages.
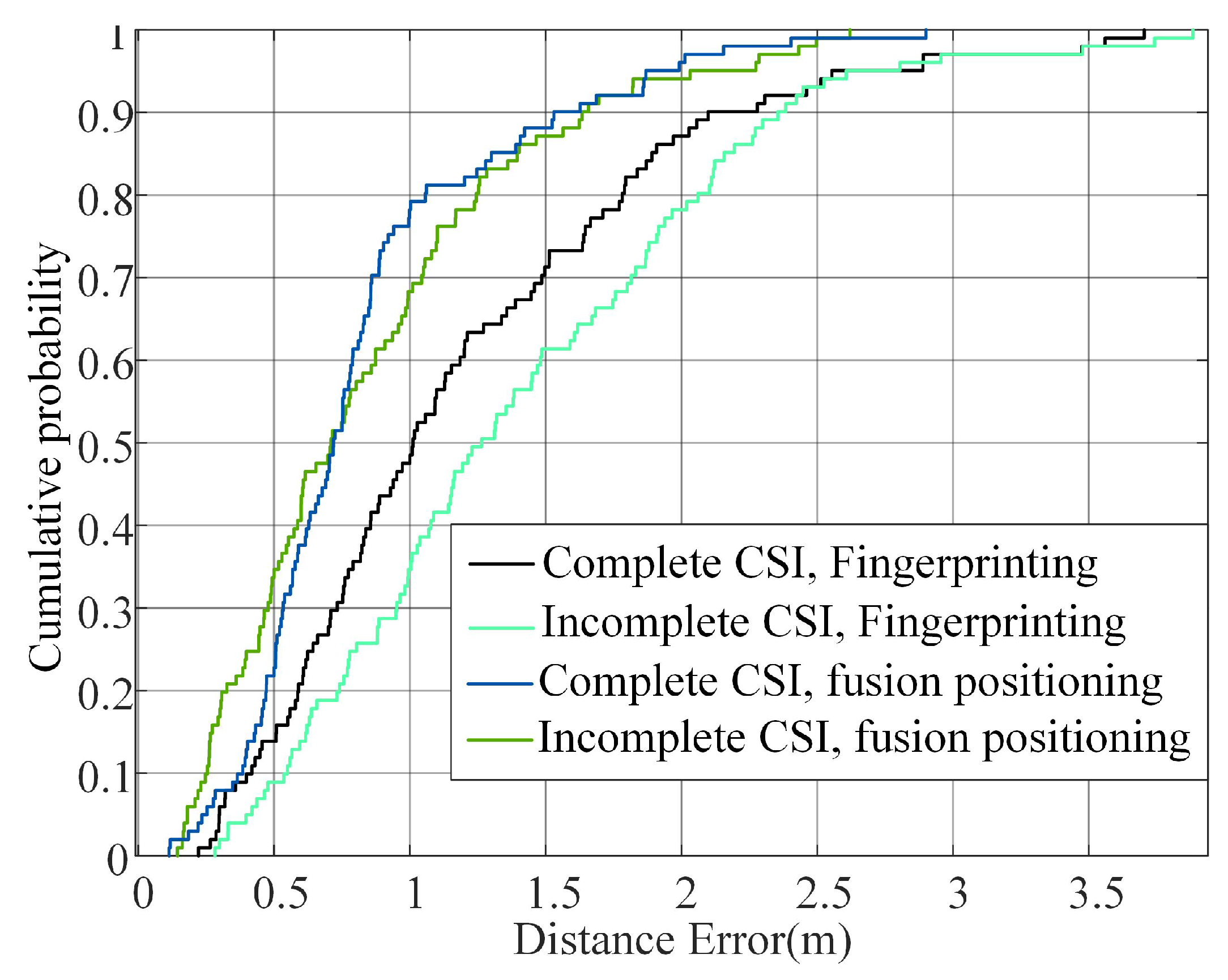
Meanwhile, in order to demonstrate the robustness of the proposed algorithm, an incomplete control group is used for experiments, and only the last six data in each single fingerprint sample are retained. Then, we test the positioning accuracy of the fingerprint positioning method and the overall fusion algorithm when using incomplete and complete CSI, respectively. The result is shown in
Figure 16.
It can be seen from the figure that when the CSI information of the fingerprint sample is missing, the resolution of a single fingerprint sample should be reduced, and the positioning accuracy of the fingerprint positioning method will be reduced to a certain extent, but at this time, the hyperbolic positioning still maintains a high accuracy. Therefore, the overall positioning accuracy is not affected too much, which once again proves the robustness and overall superiority of the algorithm.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}