
An Intelligent Identification Approach Using VMD-CMDE and PSO-DBN for Bearing Faults


Abstract
:1. Introduction
2. Composite Multi-Scale Dispersion Entropy Based on VMD
2.1. Variational Mode Decomposition Algorithm
2.2. Composite Multi-Scale Dispersion Entropy
2.2.1. Dispersion Entropy Algorithm
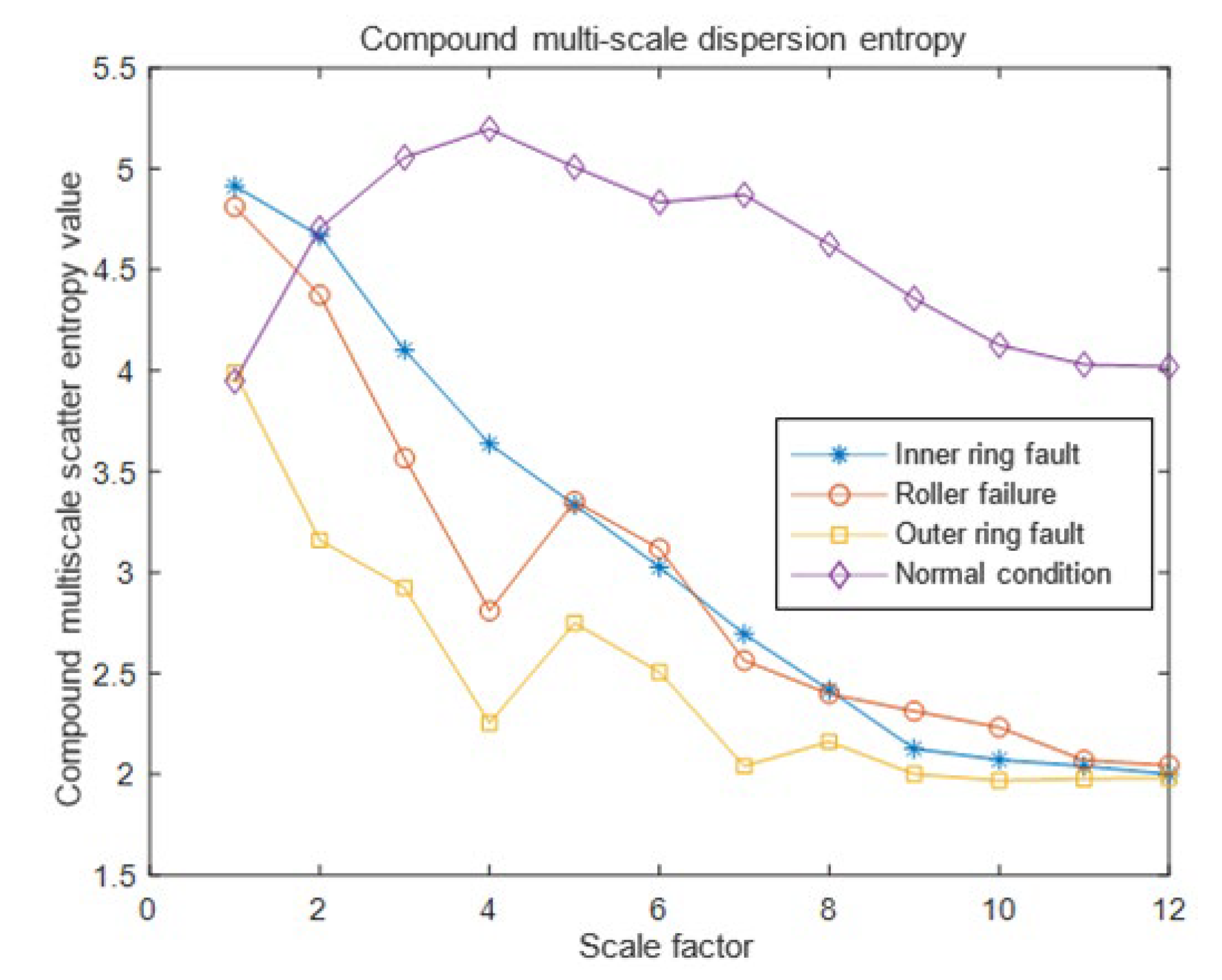
2.2.2. Composite Multi-Scale Dispersion Entropy
2.3. Fault Eigenvalue Based on VMD Composite Multi-Scale Entropy
2.3.1. The Process of Fault Eigenvalue Calculation
2.3.2. Simulation Signal Analysis
3. Fault Identification Model Based on PSO-DBN
3.1. DBN Network Structure
- —node parameters of Restricted Boltzmann Machine and are all real numbers;
- —offset coefficient of visible unit ;
- —weight values of hidden unit and visible unit ;
- —offset coefficient of hidden unit .
- —partition function (Normalization factor);
- —offset coefficient;
- —state variables for hidden and visible units;
- —hidden and visible unit weights.
3.2. PSO-Optimized DBN Model
- —inertia weight;
- —acceleration parameters;
- —random value.
4. Experimental Verification
5. The Result Discussion
6. Conclusions
- The experimental data used in this paper are manually added faults, which may not fully reflect the diversified faults of rolling bearings, single fault forms, and low bearing speed. Under actual working conditions, bearings are mostly in high-speed operation and the fault forms are complex, so the next step should be to focus on the high-speed operation of rolling bearings and the composite fault state.
- VMD multi-scale permutation entropy eigenvector, VMD multi-scale dispersion entropy eigenvector, and VMD composite multi-scale dispersion entropy eigenvector is used as the inputs of the Deep Belief Network classification model. The accuracy of VMD decomposition composite multi-scale dispersion entropy is the best.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, Z.; Shao, H.; Wang, P.; Lin, J.; Cheng, J. Deep transfer multi-wavelet auto-encoder for intelligent fault diagnosis of gearbox with few target training samples. Knowl. Based Syst. 2020, 191, 105313. [Google Scholar] [CrossRef]
- Li, X.; Zhao, H.; Yu, L.; Chen, H.; Deng, W.; Deng, W. Feature extraction using parameterized multisynchrosqueezing transform. IEEE Sens. J. 2022, 2, 14263–14272. [Google Scholar] [CrossRef]
- Xu, G.; Bai, H.; Xing, J.; Luo, T.; Xiong, N.N. SG-PBFT: A secure and highly efficient distributed blockchain PBFT consensus algorithm for intelligent Internet of vehicles. J. Parallel Distrib. Comput. 2022, 164, 1–11. [Google Scholar] [CrossRef]
- Zheng, J.J.; Yuan, Y.; Zou, L.; Deng, W.; Guo, C.; Zhao, H. Study on a novel fault diagnosis method based on VMD and BLM. Symmetry 2019, 11, 747. [Google Scholar] [CrossRef]
- Wu, D.; Wu, C. Research on the Time-Dependent Split Delivery Green Vehicle Routing Problem for Fresh Agricultural Products with Multiple Time Windows. Agriculture 2022, 12, 793. [Google Scholar] [CrossRef]
- Zhou, X.B.; Ma, H.J.; Gu, J.G.; Chen, H.L.; Deng, W. Parameter adaptation-based ant colony optimization with dynamic hybrid mechanism. Eng. Appl. Artif. Intell. 2022, 114, 105139. [Google Scholar] [CrossRef]
- Wu, X.; Wang, Z.C.; Wu, T.H.; Bao, X.G. Solving the family traveling salesperson problem in the adleman–lipton model based on DNA computing. IEEE Trans. NanoBioscience 2021, 21, 75–85. [Google Scholar] [CrossRef]
- Li, X.; Shao, H.; Lu, S.; Xiang, J.; Cai, B. Highly-efficient fault diagnosis of rotating machinery under time-varying speeds using LSISMM and small infrared thermal images. IEEE Trans. Syst. Man Cybern. Syst. 2022, 50, 1–13. [Google Scholar] [CrossRef]
- An, Z.; Wang, X.; Li, B.; Xiang, Z.L.; Zhang, B. Robust visual tracking for UAVs with dynamic feature weight selection. Appl. Intell. 2022. [Google Scholar] [CrossRef]
- Cao, H.; Shao, H.; Zhong, X.; Deng, Q.; Yang, X.; Xuan, J. Unsupervised domain-share CNN for machine fault transfer diagnosis from steady speeds to time-varying speeds. J. Manuf. Syst. 2022, 62, 186–198. [Google Scholar] [CrossRef]
- Li, T.Y.; Shi, J.Y.; Deng, W.; Hu, Z.D. Pyramid particle swarm optimization with novel strategies of competition and cooperation. Appl. Soft Comput. 2022, 121, 108731. [Google Scholar] [CrossRef]
- Deng, W.; Xu, J.; Gao, X.; Zhao, H. An enhanced MSIQDE algorithm with novel multiple strategies for global optimization problems. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 1578–1587. [Google Scholar] [CrossRef]
- Chen, H.Y.; Miao, F.; Chen, Y.J.; Xiong, Y.J.; Chen, T. A hyperspectral image classification method using multifeature vectors and optimized KELM. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2781–2795. [Google Scholar] [CrossRef]
- Yao, R.; Guo, C.; Deng, W.; Zhao, H.M. A novel mathematical morphology spectrum entropy based on scale-adaptive techniques. ISA Trans. 2022, 126, 691–702. [Google Scholar] [CrossRef]
- Deng, W.; Li, Z.; Li, X.; Chen, H.; Zhao, H. Compound fault diagnosis using optimized MCKD and sparse representation for rolling bearings. IEEE Trans. Instrum. Meas. 2022, 71, 3508509. [Google Scholar] [CrossRef]
- Tian, C.; Jin, T.; Yang, X.; Liu, Q. Reliability analysis of the uncertain heat conduction model. Comput. Math. Appl. 2022, 119, 131–140. [Google Scholar] [CrossRef]
- Zhao, H.M.; Liu, J.; Chen, H.Y.; Chen, J.; Li, Y.; Xu, J.J.; Deng, W. Intelligent diagnosis using continuous wavelet transform and gauss convolutional deep belief network. IEEE Trans. Reliab. 2022, 1–11. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhang, J.; Yang, X.; Ling, Y. Optimal reactive power dispatch using water wave optimization algorithm. Oper. Res. 2020, 20, 2537–2553. [Google Scholar] [CrossRef]
- Cui, H.; Guan, Y.; Chen, H. Rolling element fault diagnosis based on VMD and sensitivity MCKD. IEEE Access 2021, 9, 120297–120308. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, H.; Luo, J.; Zhang, Q.; Jiao, S.; Zhang, X. Enhanced Moth-flame optimizer with mutation strategy for global optimization. Inf. Sci. 2019, 492, 181–203. [Google Scholar] [CrossRef]
- Liu, Q.; Jin, T.; Zhu, M.; Tian, C.; Li, F.; Jiang, D. Uncertain currency option pricing based on the fractional differential equation in the Caputo sense. Fractal Fract. 2022, 6, 407. [Google Scholar] [CrossRef]
- Li, G.; Li, Y.; Chen, H.; Deng, W. Fractional-order controller for course-keeping of underactuated surface vessels based on frequency domain specification and improved particle swarm optimization algorithm. Appl. Sci. 2022, 12, 3139. [Google Scholar] [CrossRef]
- Wei, Y.Y.; Zhou, Y.Q.; Luo, Q.F.; Deng, W. Optimal reactive power dispatch using an improved slime Mould algorithm. Energy Rep. 2021, 7, 8742–8759. [Google Scholar] [CrossRef]
- Jin, T.; Xia, H.; Deng, W.; Li, Y.; Chen, H. Uncertain fractional-order multi-objective optimization based on reliability analysis and application to fractional-order circuit with Caputo type. Circ. Syst. Signal Pract. 2021, 40, 5955–5982. [Google Scholar] [CrossRef]
- Xu, G.; Dong, W.; Xing, J.; Lei, W.; Liu, J. Delay-CJ: A novel cryptojacking covert attack method based on delayed strategy and its detection. Digit. Commun. Netw. 2022. [Google Scholar] [CrossRef]
- Wu, E.Q.; Zhou, M.; Hu, D.; Zhu, L.; Tang, Z. Self-paced dynamic infinite mixture model for fatigue evaluation of pilots’ brains. IEEE Trans. Cybern. 2022, 52, 5623–5638. [Google Scholar] [CrossRef]
- Jiang, M.; Yang, H. Secure outsourcing algorithm of BTC feature extraction in cloud computing. IEEE Access 2020, 8, 106958–106967. [Google Scholar] [CrossRef]
- Deng, W.; Ni, H.C.; Liu, Y.; Chen, H.L.; Zhao, H.M. An adaptive differential evolution algorithm based on belief space and generalized opposition-based learning for resource allocation. Appl. Soft Comput. 2022. [Google Scholar] [CrossRef]
- Zosso, D.; Dragomiretskiy, K. Variational mode decomposition. In IEEE Transactions on Signal Processing: A Publication of the IEEE Signal Processing Society; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Rostaghi, M.; Azami, H. Dispersion Entropy: A measure for time series analysis. IEEE Signal Process. Lett. 2016, 23, 610–614. [Google Scholar] [CrossRef]
- Zhang, S.; Sun, G.; Li, L.; Li, X.; Jian, X. Study on mechanical fault diagnosis method based on LMD approximate entropy and fuzzy C-means clustering. Chin. J. Sci. Instrum. 2013, 34, 714–720. [Google Scholar]
- Wang, J.; Shuai, C.; Chao, Z. Fault diagnosis method of gear based on VMD and multi-feature fusion. J. Mech. Transm. 2017, 3, 032. [Google Scholar]
- Li, C. Research on Rolling Bearing Fault Diagnosis Method Based on Empirical Wavelet Transform and Scattered Entropy; Anhui University of Technology: Anhui, China, 2019. [Google Scholar]
- Hinton, G.; Osindero, S.; Teh, Y. A fast learning algorithm for deep belief nets. Neura I Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Lei, Y.; Jia, F.; Zhou, X.; Lin, J. A Deep learning-based method for machinery health monitoring with big data. J. Mech. Eng. 2015, 51, 49–56. [Google Scholar] [CrossRef]
- Li, W.; Shan, W.; Xu, Z.; Zeng, X. Bearing fault classification and recognition based on deep belief network. J. Vib. Eng. 2015, 29, 152–159. [Google Scholar]
- Shi, P.; Liang, K.; Zhao, N. Gear intelligent fault diagnosis based on deep learning feature extraction and particle swarm support vector machine state recognition. China Mech. Eng. 2017, 28, 1056–1061. [Google Scholar]
- Wang, W.; Carr, M.; Xu, W.; Kobbacy, K. A model for residual life prediction based on Brownian motion with an adaptive drift. Microelectron. Reliab. 2010, 51, 285–293. [Google Scholar] [CrossRef]
- Sun, L.; Tang, X.G.; Zhang, X.H. Study of gearbox residual life prediction based on stochastic filtering model. Mech. Transm. 2011, 35, 56–60. [Google Scholar]
- Deng, W.; Liu, H.; Xu, J.; Zhao, H.; Song, Y. An improved quantum-inspired differential evolution algorithm for deep belief network. IEEE Trans. Instrum. Meas. 2020, 69, 7319–7327. [Google Scholar] [CrossRef]
- Zhao, H.; Liu, H.; Xu, J.; Guo, C.; Deng, W. Research on a fault diagnosis method of rolling bearings using variation mode decomposition and deep belief network. J. Mech. Sci. Technol. 2019, 33, 4165–4172. [Google Scholar] [CrossRef]
- Li, T.; Qian, Z.; Deng, W.; Zhang, D.; Lu, H.; Wang, S. Forecasting crude oil prices based on variational mode decomposition and random sparse Bayesian learning. Appl. Soft Comput. 2021, 113PB, 108032. [Google Scholar] [CrossRef]
- Pan, Y.; Chen, J.; Guo, L. Robust bearing performance degradation assessment method based on improved wavelet packet–support vector data description. Mech. Syst. Signal. Process. 2009, 23, 669–681. [Google Scholar] [CrossRef]
- Dong, S.; Luo, T. Bearing degradation process prediction based on the PCA and optimized LS-SVM model. Measurement 2013, 46, 3143–3152. [Google Scholar] [CrossRef]
- Xue, X.H. Evaluation of concrete compressive strength based on an improved PSO-LSSVM model. Comput. Concr. Int. J. 2018, 21, 505–511. [Google Scholar]
- He, Q. Vibration signal classification by wavelet packet energy flow manifold learning. J. Sound Vib. 2013, 332, 1881–1894. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An improved particle swarm optimization (PSO)–Based MPPT for PV with reduced steady-state oscillation. IEEE Trans. Power Electron. 2012, 27, 3627–3638. [Google Scholar] [CrossRef]
- Roux, N.L.; Bengio, Y. Representational Power of Restricted Boltzmann Machines and Deep Belief Networks. Neural Comput. 2008, 20, 1631–1649. [Google Scholar] [CrossRef]
- Larochelle, H.; Bengio, Y.; Louradour, J.; Lamblin, P. Exploring Strategies for Training Deep Neural Networks. J. Mach. Learn. Res. 2009, 1, 1–40. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Status | Training Sample Numbers | Test Sample Numbers | Categorization Label |
|---|---|---|---|
| Inner ring fault | 70 | 30 | 1 |
| Roller ring fault | 70 | 30 | 2 |
| Outer ring fault | 70 | 30 | 3 |
| Normal signal | 70 | 30 | 4 |
| Bearing Status | Total Number of Test Set Samples | Correct Number | Accuracy |
|---|---|---|---|
| Inner ring fault | 30 | 27 | 90% |
| Roller ring fault | 30 | 22 | 73.3% |
| Outer ring fault | 30 | 30 | 100% |
| Normal condition | 30 | 30 | 100% |
| Whole bearing | 120 | 109 | 90.33% |
| Bearing Status | Total Number of Test Set Samples | Correct Number | Accuracy |
|---|---|---|---|
| Inner ring fault | 30 | 30 | 100% |
| Roller ring fault | 30 | 30 | 100% |
| Outer ring fault | 30 | 30 | 100% |
| Normal condition | 30 | 30 | 100% |
| Whole bearing | 120 | 120 | 100% |
| Bearing Status | VMD-MPE | VMD-MDE | VMD-CMDE |
|---|---|---|---|
| Inner ring fault | 100% | 100% | 90% |
| Roller ring fault | 43.33% | 33.33% | 73.33% |
| Outer ring fault | 70% | 100% | 100% |
| Normal condition | 100% | 100% | 100% |
| Whole bearing | 78.33% | 88.33% | 90.33% |
| Bearing Status | VMD-MPE | VMD-MDE | VMD-CMDE |
|---|---|---|---|
| Inner ring fault | 96.67% | 100% | 100% |
| Roller ring fault | 96.67% | 93.33% | 100% |
| Outer ring fault | 100% | 100% | 100% |
| Normal condition | 100% | 100% | 100% |
| Whole bearing | 98.33% | 98.33% | 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, E.; Wang, Y.; Wang, P.; Guan, Z.; Deng, W. An Intelligent Identification Approach Using VMD-CMDE and PSO-DBN for Bearing Faults. Electronics 2022, 11, 2582. https://doi.org/10.3390/electronics11162582
Yang E, Wang Y, Wang P, Guan Z, Deng W. An Intelligent Identification Approach Using VMD-CMDE and PSO-DBN for Bearing Faults. Electronics. 2022; 11(16):2582. https://doi.org/10.3390/electronics11162582
Chicago/Turabian StyleYang, Erbin, Yingchao Wang, Peng Wang, Zheming Guan, and Wu Deng. 2022. "An Intelligent Identification Approach Using VMD-CMDE and PSO-DBN for Bearing Faults" Electronics 11, no. 16: 2582. https://doi.org/10.3390/electronics11162582
APA StyleYang, E., Wang, Y., Wang, P., Guan, Z., & Deng, W. (2022). An Intelligent Identification Approach Using VMD-CMDE and PSO-DBN for Bearing Faults. Electronics, 11(16), 2582. https://doi.org/10.3390/electronics11162582