1. Introduction
The significance of ground autonomous vehicles began with the DARPA (Defense Advanced Research Projects Agency) urban challenge in 2007 [
1,
2]; this concept later extended to the development of aerial vehicles. Different concepts were also applied to flight dynamics techniques to improve flight stability. Optimization algorithms for the path findings of ground robotics [
3,
4,
5,
6,
7] and aerial vehicles [
8,
9,
10,
11,
12] include numerous applications. Since the 1970s, path planning has received a lot of attention, and it has been used to address issues in a variety of sectors, from simple geographical route planning to selecting an acceptable action sequence to achieve a certain objective. Path planning can be employed in fully-known or partially-known surroundings, as well as in completely new situations, where data from system-mounted sensors are used to update environmental maps and instruct the robot/planned AV’s movements.
To keep the robot moving from the start state to the goal location through various intermediate stages, a proper trajectory is constructed as a series of actions. Every choice made by path planning algorithms is determined by the information that is currently accessible, as well as by other factors, such as the Euclidean distance computation’s calculation of the shortest distance to the target point (i.e., certain objectives are required to be fulfilled). In terms of optimization, the best path must travel the fewest distances, be free of obstacles and collisions, and take the least amount of time to arrive at the desired state.
In the last decade, multiple path planning methods have been formulated for land and aerial vehicles using the trajectory optimization problem. These trajectory optimization problems are distinguished into two groups: (i) heuristics and, (ii) non-heuristic methods. The former uses the trade-off in producing optimal solutions but gives computationally effective results and the latter uses mathematical derivations, which are computationally expensive [
13].
For mobile robots or aerial vehicles, autonomous navigation is a crucial tool. It aids in reducing their reliance on human assistance. However, it does involve several jobs or difficulties to accomplish, such as path planning. This assignment entails determining the optimal course of action for obtaining a robot from its current condition to the target state. Both states may, for example, represent the objective and the starting positions, respectively. This plan of action takes the shape of a path, which is also known as a route in other works. In general, path planning algorithms aim to find the optimal path or at least a close approximation to it. The optimal route refers to the best path, in the sense that it is the outcome of minimizing one or more objective optimization functions. This path, for example, may be the one that takes the least amount of time. This is crucial in operations such as search-and-rescue [
14], for example, catastrophe victims may request assistance in life-or-death circumstances. Another optimization function to consider could be the energy of the robot. In the case of planetary exploration, this is critical since rovers have limited energy resources available.
For collision avoidance of a mobile robot in a dynamic scenario, Rath et al. [
15] considered a virtual disc in front of the mobile robot that was centered at the mobile robot’s heading angle. According to some specified regulations, the crossing angle between the disc and the obstacles was computed and continually modified in the direction of the mobile robot. To tackle the motion-planning problem, ANNs and radial basis neural networks are utilized to forecast the movements of dynamic barriers.
An efficient path planning algorithm must meet four requirements. First, in actual static situations, the motion planning approach must always be capable of identifying the best path. Second, it must be adaptable to changing conditions. Third, it must be consistent with and strengthen the self-referencing strategy selected. Fourth, it must keep the complexity, data storage, and computing time to a minimum. A survey article on land/aerial and underwater has been given by a number of scholars. However, these surveys are insufficient to offer information on their navigation [
16]. A detailed examination of individual navigational strategies has been presented in this research. The purpose of the suggested survey articles on vehicle navigation is to discover the research gaps and potential for innovation in a certain field.
The route generation and optimization problem can be tackled using deterministic (numerical) approaches, nature-inspired algorithms, or a combination of these techniques. To calculate the precise solution, there are several numerical techniques available, including the iterative method [
17], Runge Kutta [
18], Newton–Raphson method [
19], and the bisection method [
20]. These techniques can be utilized to locate any type of answer. These algorithms are used to tackle path planning, trajectory optimization, and a variety of other vehicle versions for autonomous vehicles. Nature-inspired approaches are based on the social hierarchy of animals and birds such as ants, bees, and flies [
21,
22,
23,
24]. There are a great number of different algorithms, which are inspired by the Grey Wolf Optimizer, Whale Optimization, the Deer Hunting Algorithm, the Slap Swarm Algorithm, the Grasshopper Algorithm, the Ant Lion Optimizer, the Moth Flame Optimizer, simulated annealing, the Arithmetic Algorithm, the Harmony Search Algorithm, the Aquila Optimizer, and the Owl Search Algorithm [
25,
26,
27,
28,
29,
30,
31,
32,
33].
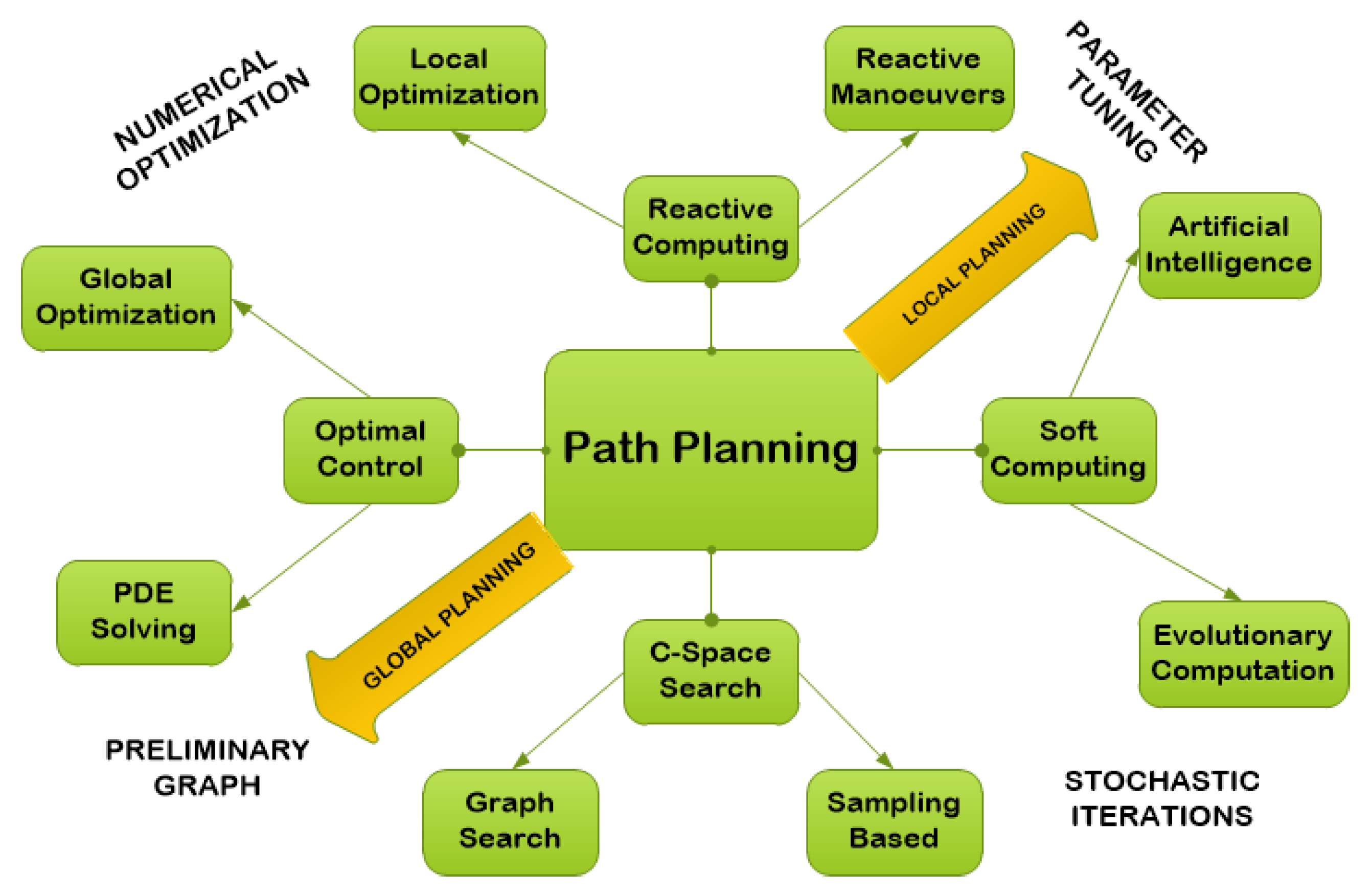
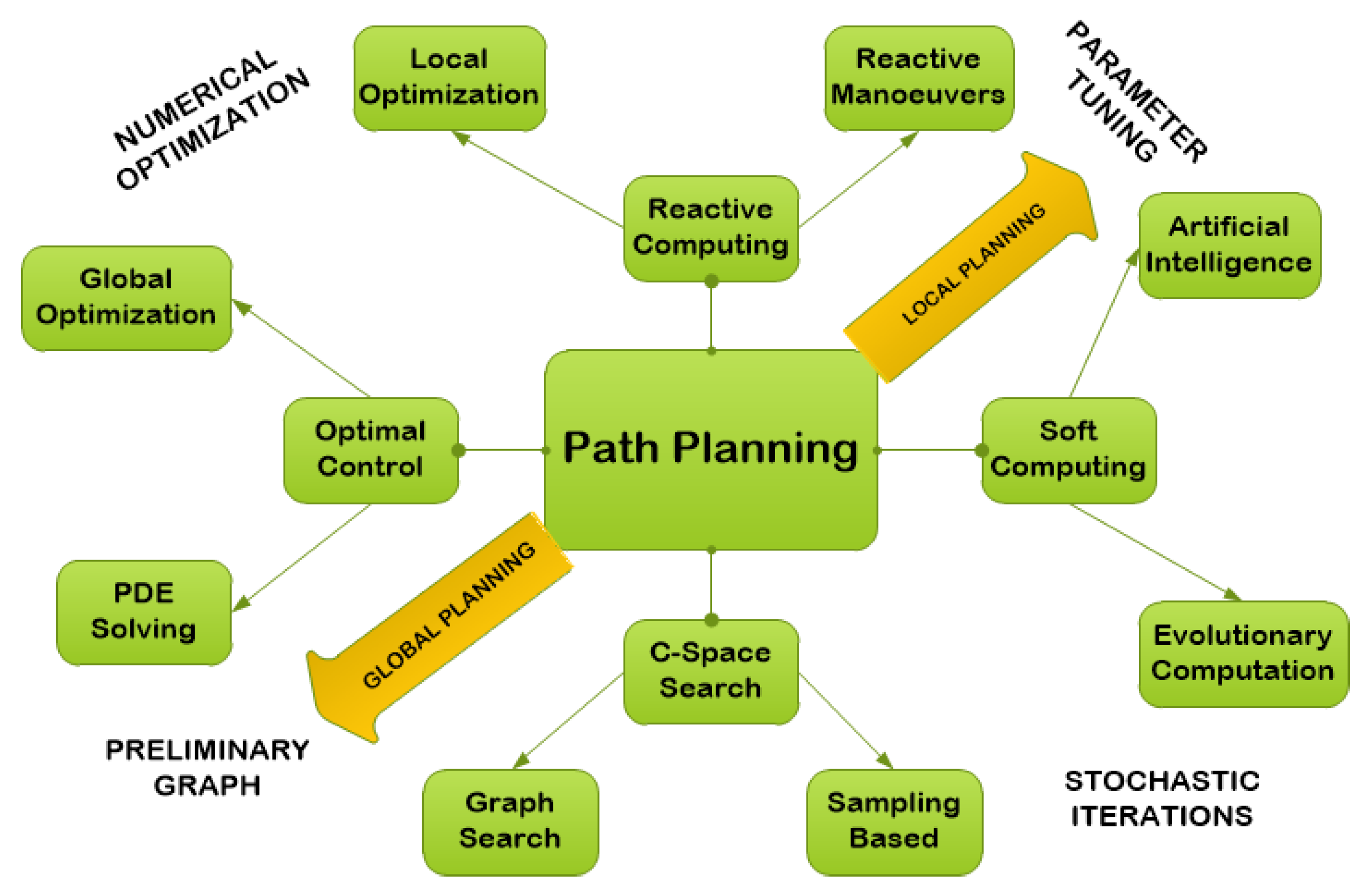
Path planning for autonomous vehicles is also known as a multi-objective optimization since it involves achieving many goals, such as generating optimal routes while avoiding obstacles that evade the capability [
34]. Route planning for agents can be divided into different categories based on how they complete a task in a given environment, namely: (i) reactive computing, (ii) soft computing, (iii) optimal control, and (iv) C-space search, refer to
Figure 1.
The first idea is defined as: if the vehicle has access to or knowledge of the surrounding region prior to the start of its voyage, it is inferred as a priori information. The latter, on the other hand, involves the vehicle lacking information about the surrounding region [
35,
36,
37]. The surrounding space can also be divided as dynamic or static; when the obstacles are in motion, it is called dynamic motion and when the objects are not in motion, it is known as a static motion [
35,
38,
39,
40,
41]. Therefore, it is evident the optimization of path planning and space exploration techniques have gained significant importance in the research community (due to their vast applicability and diversity). Several authors have used different industrial robots to implement the algorithms and validate their effectiveness and robustness.
Table 1 depicts such few robotic parameters mentioned in the different studies.
1.1. Objective and Contents
This research examines numerical approaches along with nature-inspired techniques, and their integration with each other (or individually), for navigation and obstacle avoidance utilized for land, aerial, and underwater vehicles. This research is aimed at providing academics with the most up-to-date knowledge for path optimization and environment modeling. This paper compares several algorithms and shows how they can be implemented in various contexts. The following is a list of this review’s contributions:
1.2. Paper Organization
The paper is organized in the following manner.
Section 2 elaborates on the fundamentals regarding the trajectory planning.
Section 3 presents detailed information regarding the numerical methods, bio-inspired algorithms, and hybrid algorithms involved in land, aerial, and underwater vehicles.
Section 4 contains an elaborated description of the challenges involved in land, aerial, and underwater vehicles. The paper ends with our conclusion in
Section 5.
2. Trajectory Planning Fundamentals
To formulate the desired trajectories, the trajectory planning problem is treated as an optimization problem. With the exception of simple problems (such as the infinite horizon linear quadratic problem [
52]), these optimization problems must be solved numerically. Such techniques can be divided into three major methods—dynamic programming, direct methods, and indirect methods [
53].
In the 1970s, there was interest in path planning [
54]; in the following years, it has been used to solve problems in a variety of sectors, from straightforward geographical route planning to the choice of an appropriate action sequence that is necessary to achieve a specific goal. When information is obtained from system-mounted sensors and updated environmental maps, path planning can be employed in fully or partially known surroundings as well as in completely new environments to guide the desired motion of the robot [
46,
55]. Finding a single solution to this NP-hard problem is not the goal; rather, it is to find the best possible answer, one that travels the shortest distance, makes the fewest maneuvers, and avoids all known obstacles. The global planner often divides this module into two parts: the local planner, which recalculates the initial plan to account for potential dynamic impediments, and the global planner, which employs a priori knowledge of the environment to produce the best path, if any.
The created plan consists of a set of waypoints for both the global
and the local
,
, where S is the navigation plane on which the vehicle can drive. Learning-based approaches have begun to demonstrate their effectiveness in resolving motion planning issues. They either use human-designed incentive functions or learn workable solutions from previous successful planning experiences to direct the robot’s movement. In general, supervised/unsupervised learning and reinforcement learning can be used to categorize learning-based approaches to robot motion planning. Four requirements are critical for effective path planning; Algorithm 1. First, in realistic static situations, the motion planning technique must always be able to identify the best path. Second, it needs to be scalable to dynamic contexts. Third, it must continue to be beneficial to (and compatible with) the selected self-referencing strategy. The complexity, data storage, and computing time must all be kept to a minimum [
56]. Realizing the importance of path planning, this research introduces a wide range of path planning algorithms for all three domains of ground, aerial, and underwater applications.
| Algorithm 1 Integrated CME-Adaptive Aquila Optimizer. |
- 1:
Set nRbt, iteration, agent start position - 2:
Define utility of unknown space = 1 - 3:
while iter = iter + 1 do - 4:
for all nRbt do - 5:
Initialize coordinates of - 6:
Determine the cost of - 7:
Subtract & - 8:
Utilize X1, X2, X3, and X4 - 9:
Update the X(iter + 1) position - 10:
Re-select the agent position - 11:
Reduce on X(t + 1) - 12:
end for - 13:
Determine G1, G2 & QF - 14:
end while - 15:
return the solution
|
Trajectory Planning: Mathematical Framework
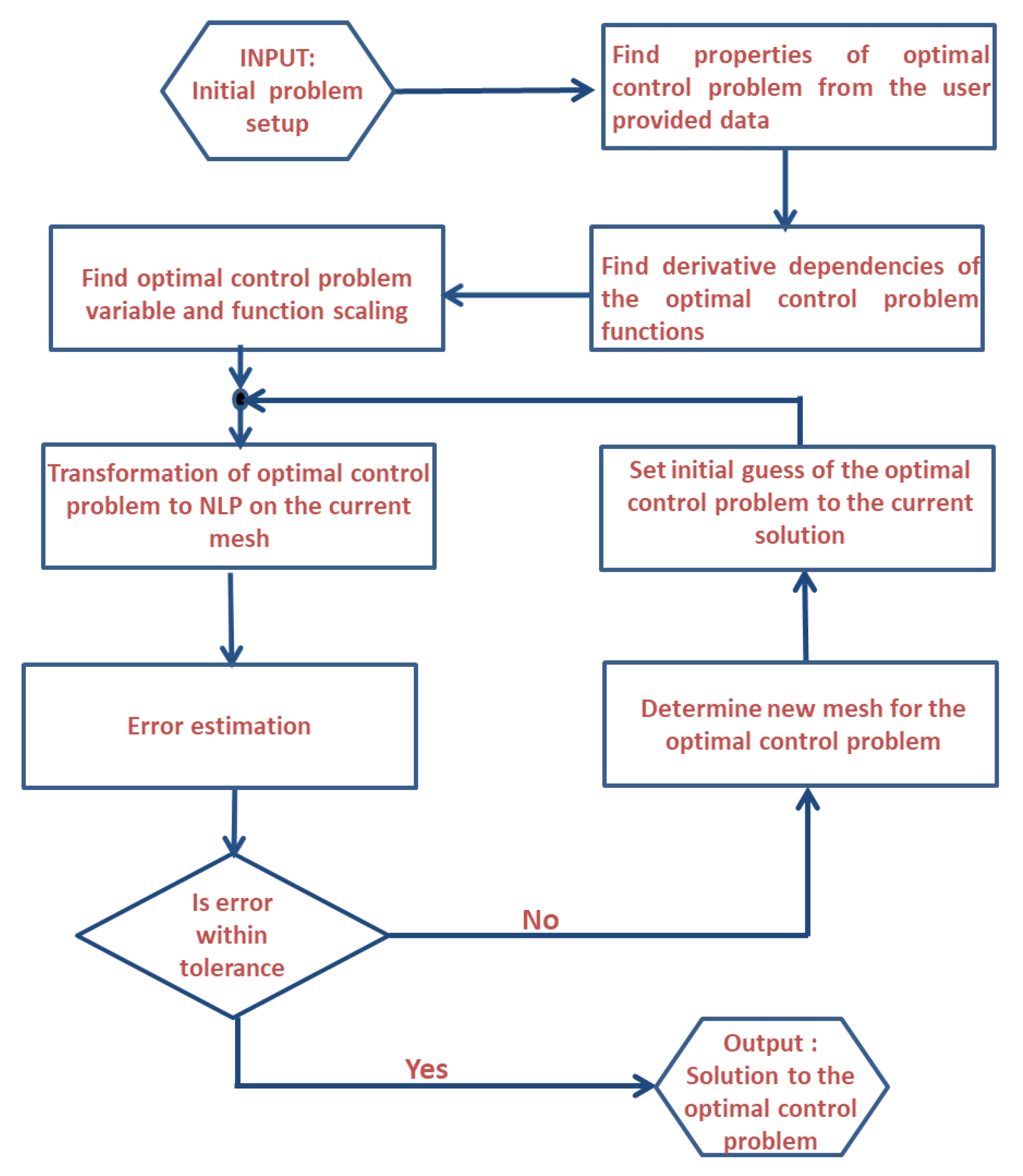
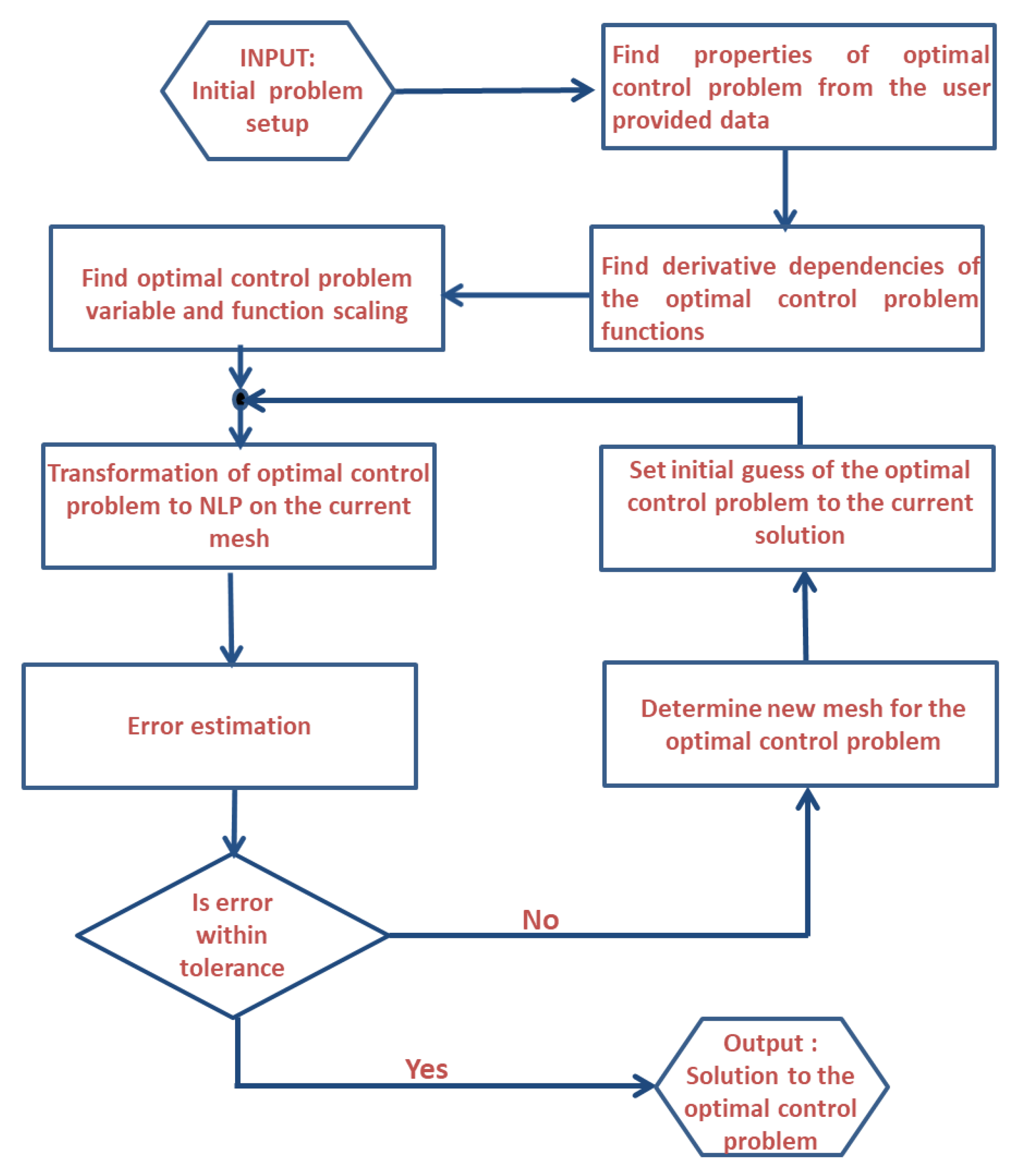
Essentially, all numerical methods for solving the trajectory planning problem involve iterative mechanisms with a finite number of unknowns and known variables, subject to static, dynamic, and linkage constraints. This functionality is demonstrated through
Figure 2. The flow chart elaborates the fundamental steps adopted in the trajectory planning algorithm beginning with user-defined input data for the stated problem to the computation of the final trajectory.
Conventionally the problem is configured as a multiple-domain optimal control problem [
57]. In this,
is the phase number,
V is the total number of phases,
is the output dimension,
is the input dimension,
is the integral dimension, and
is the dimension of the static parameters. The optimal control problem then tries to determine the state,
, control,
, integrals
, start time,
, phase terminal time,
, in all phases
, along with the static parameters
, which minimize the objective function in Equation (
1)
subject to constraints in Equation (
2), inequality path constraints in Estimates (
3), boundary constraints in Estimates (
4), and linkage constraints in Estimates (
5).
The required state and control variables are then calculated using polynomial interpolation as elaborated in Equation (
6)
where
The control is then determined using Equation (
7)
where
. From Equation (
6),
is approximated by
(see Equation (
8))
The continuous cost function of Equation (
1) is approximated using a quadrature given by Equation (
9)
where
are the weights. The boundary constraint of Estimates. (
4) is expressed as in Equation (
10)
The cost function and algebraic constraints in Equation (
9) define the transformed problem, whose solution is an approximate solution to the original trajectory planning problem from the time
to
.
This fundamental framework has been utilized by various research studies for numerous applications and is now considered a pretty robust and widely acceptable technique for ground, aerial, space, and underwater trajectory optimization problems [
58,
59,
60,
61,
62,
63,
64,
65,
66,
67,
68,
69,
70,
71,
72,
73,
74,
75].
3. Relevant Studies
In this section, we will present an in-depth analysis and review of major studies performed for space exploration for autonomous systems. As elaborated earlier, path planning, space exploration, and trajectory optimization problems can be solved utilizing numerical techniques, bio-inspired algorithms, and the hybridization of these techniques with each other. In the beginning, deterministic methods or numerical methods were employed for path planning and other jobs. However, due to their inability to generate random solutions and computationally expensive nature, they were replaced by other algorithms. With growing interest, research areas have expanded and introduced bio-inspired techniques based on swarm, ant, reptile, etc., to solve trajectory planning, obstacle avoidance, and trajectory optimization. It is often seen that no single algorithm or technique can guarantee the desired results; therefore, it is common practice to integrate techniques to achieve higher accuracy and design a system more efficiently. This whole process is called the hybridization of algorithms/techniques [
76].
The analysis will comprehensively cover the numerical, bio-inspired, and hybrid optimization techniques utilized for aerial, surface, and subsurface purposes.
3.1. Numerical Techniques
The implementation of algorithms for obtaining numerical solutions is a part of numerical analysis. It entails mathematical analysis on a theoretical level. The numerical methodologies, and their utilities found in land, aerial, and undersea vehicles, are presented in this section.
3.1.1. Applications to Aerial Vehicles
The most predominant feature involved in any aerial vehicle system is the sensor performance. Numerous sensors, such as radar, LiDAR, and sonar, are linked with the efficiency of aerial vehicles and their dynamics. In [
77,
78,
79], the authors efficiently utilized radar to detect fast-moving targets, whereas the authors of [
80,
81] employed LiDAR for airborne purpose. Moreover, the authors of [
82] utilized sonar for similar purposes. Important scholarly contributions in this aspect are summarized in
Table 2. Various algorithms [
83,
84,
85] have been developed to control the flight mechanics of UAVs. Few have presented and implemented the leader–follower strategy for accurate outcomes. The following is a list of works that are related to this one: Hasircioglu et al. [
86] implemented the GA algorithm for 3D UAV flights for multiple missions. Nikolos et al. [
87] used the evolutionary algorithm to increase the robustness and efficiency. Similarly, many researchers have worked on the obstacle avoidance of UAVs. One way is to add a penalty function in the objective function to catch the error [
88]. Mansury et al. [
89] came up with the penalty function in a planned path when a collision occurred.
One method added a penalty to its objective function as the planned path neared an obstacle, while another approach imposed a penalty only when the planned path resulted in a collision. Obstacles can also be treated as flight-restricted areas in lieu of a single point. Zhao et al. [
90,
91] converted an optimal control problem into parameter optimization via a collocation approach (numerically-solved with the software, Nonlinear Programming Solver (NPSOL)) [
92]. NPSOL is a suite of Fortran 77 subroutines designed to solve a non-linear programming problem. NPSOL uses sequential quadratic programming (SQP) algorithm, in which the search direction is the solution of a quadratic programming sub-problem. The step size at each iteration is iteratively selected to produce a sufficient decrease in an augmented Lagrangian merit function. After successful convergence, solutions of the NPSOL program represent a locally optimal solution to the non-linear programming problem. Zhang et al. [
93] followed the nature-inspired technique that birds follow and developed an algorithm for a target using the Tau theory.
3.1.2. Applications to Ground Vehicles
Curve interpolation planners, such as clothoid, polynomial, spline, and Bézier curves, are common in online route planning. Because the behavior of the curve is specified by a few control points or parameters, these planners are comparable to graph search techniques and have minimal computing costs. However, the resultant path’s optimality cannot be guaranteed, and the dynamic restrictions of a robot are not taken into account during the planning phase (because the sizes of the curves in obstacles vary), necessitating a smoothing step. The clothoid curve introduces a novel way to reduce the route length and curvature change [
98]. The suggested technique produces a closed-form solution to link two clothoid sets for the position of a waypoint in this approach, which considers two points on the plane. This method lowers the robot’s rapid changes in curvature and sideslip and improves movement performance. Zhang et al. [
99] measured unmanageable divergence. This statistic was used to build a system to transition between numerous predictive controllers, reducing the controller’s return time while maintaining predictive accuracy. The authors of [
100] created a smooth route by combining RRT* (rapidly-exploring random trees) and spline approaches. The suggested bidirectional Spline-RRT* method is based on the cubic curve and meets both start and target position direction restrictions. This approach is unlike any previous route planning algorithm, and the robot’s solution is sub-optimal yet workable.
3.1.3. Application to Underwater Vehicle (AUV)
The navigation and controls of autonomous underwater vehicle systems have reached the same level of importance as ground and aerial vehicles. Ocean vehicle navigation is another name for them. It is also crucial to discuss the AUV system’s connected literature. Autonomous underwater vehicles, such as ground and aerial vehicles, require path planning to navigate in the best possible way. However, in comparison to ground and airborne vehicles, the water environment has several problems because of data transmission, sensing range, and power limits.
Because of the constantly shifting bandwidth channel, communicating successfully underwater is difficult. As a result, deciding which path to follow for autonomous underwater vehicles is a difficult task. Path planning and trajectory planning are two types of motion planning. The first one is described as the numerous waypoints in which a vehicle must travel to reach the destination point, while the latter is defined as the time required to complete the journey. Underwater, the GPS system is not available and with weak communication power, it is extremely hard to set the routes for AUVs. Soylu et al. [
101] presented an algorithm with an adaptive term; it works on the concept of control, although it is only concerned with maritime vehicles. An underwater vehicle uncertainty estimator (limited to 4 DOF systems defined by a diagonal inertia matrix) is proposed. The authors of [
102] suggested a unique technique that consisted of two steps: (i) the creation of a velocity control algorithm in terms of the normalized generalized velocity components (NGVC) as a tool for analysis, and, (ii) its application to the vehicle dynamics inquiry. The algorithm is defined in terms of the altered equations of motion resulting from the decomposition of the inertia matrix. The author proposed approach is appropriate for fully-operated underwater vehicles and may be used to conduct numerical testing of the assumed model before conducting an actual experiment. The simulation on a 6 DOF underwater vehicle demonstrates the usefulness of the suggested technique.
A nonlinear MPC (model predictive control) is proposed in [
103] for an autonomous underwater vehicle. A receding horizon optimization framework with a spline template was used to address the path planning issue. Once the current local optimal path is created, it is used as the vehicle’s reference trajectory. A nonlinear model predictive control (MPC) system is used to simultaneously manage the depth of the AUV and to interact amicably with the dynamic route planning method. For tracking control, a combination of the path planning result and MPC is employed. A path planning approach using MPC is suggested to select the maneuvers mode for autonomous cars in dynamic conditions [
104].
3.2. Bio-Inspired Techniques
This section provides information about trajectory planning for land, airborne, and undersea vehicles, as well as different nature-inspired techniques. The primary idea behind path optimization approaches is to define route planning as an optimization problem that takes into account the robot’s intended performance and restrictions. This method can determine the best path between the start and target points.
Siddique et al. [
105] investigated meta-heuristic and nature-inspired algorithms that mimic natural events in natural sciences. Many academics have tackled the challenge of ground and aerial vehicle trajectory planning and obstacle avoidance using an optimization algorithm that replicates the behavior of live organisms, such as fish, ants, bees, whales, wolves, and bats. [
106,
107,
108,
109,
110,
111] They are referred to as unconventional approaches. These algorithms are known as bio-inspired approaches, and they have been used in engineering to solve challenging mathematical issues [
112]. A few bio-inspired algorithms and their summaries are presented in
Table 3.
3.2.1. Application to Aerial Vehicles
Zhang et al. [
128] focused on obtaining an ideal flying route while avoiding hazards in a battle area. They exhibited Grey Wolf Optimizer (GWO) performance on an unmanned combat aerial vehicle (UCAV; also known as a combat drone, colloquially shortened as drone or battlefield UAV) in a 2D environment. The safest path is determined by connecting nodes while avoiding risks. The simulation results were astounding, demonstrating that an unmanned combat aerial vehicle (UCAV) is more capable than a contemporary algorithm. Similarly, Qu et al. [
132] blended the methods to accomplish successful route planning in UAVs. They merged the Grey Wolf Optimizer (GWO) with the Symbiotic Organisms Search (SOS) to present another variant optimizer—the Grey Wolf Optimizer (SGWO) and the Modified Symbiotic Organisms Search (MSOS), called HSGWO-MSOS. The stochastic parameters involved in the algorithm were intelligently adjusted to further enhance the convergence rate. For analysis, a linear difference equation was utilized, and the cubic B-spline curve approach was used to smooth the flight trajectory. The experimental findings show that the proposed algorithm HSGWO-MSOS delivers more viable outputs and is more efficient in conducting the flight trajectory.
Lewis et al. [
133] presented a particle swarm optimization path-finding (PSOP) for UAV navigation purposes. The method was employed to control the flock of drones; based on this, a model known as drone flock control (DFC) was constructed. The model is combined with Reynolds flocking and the AI method for obstacle avoidance for UAVs in an unknown space. Majd Saied et al. [
134] looked at a variety of unmanned aerial vehicles. The suggested concept uses the Artificial Bee Colony (ABC; inspired by the intelligent foraging behavior of honey bees) method to calculate velocity to avoid obstacles and maintain track of flight data. The simulations were run in MATLAB using various case situations.
3.2.2. Application to Ground Vehicles
In situations with dynamic impediments, Han et al. [
126] employed genetic algorithms to identify the shortest pathways. Marco Cruz et al. [
39] generated an ideal path by using the ABC method to perform local searches, which progressively created a path without colliding by correlating the mobile robot’s start and end points, and then using evolutionary programming to optimize the practical path. GWO has an atypical condition of local optima avoidance, according to Sen Zhang et al. [
128], which increases the likelihood of discovering reasonable approximations of the optimal weighted total cost of this path. Furthermore, due to the strong utilization of the GWO, the accuracy of the generated optimal values for weighted sum cost is quite high. Janglova et al. [
135] demonstrated the use of a NN to navigate a wheeled mobile robot in a mostly unknown area. To build a collision-free route, they employed two NN-based techniques. The first neural mechanism used sensory input to discover clear space, while another NN avoided the nearest impediment to find a safe path (to prevent human guidance during the navigation procedure). Gasparri et al. [
136] offered real-time navigation in a hallway, lobby, and built floor environments using a single mobile robot system. Abbas et al. [
137] developed an upgraded BFO algorithm to improve the path planning performance of a wheeled robot.
3.2.3. Application to Underwater Vehicles
Shen et al. [
103] designed a multi-AUV target search with a bio-inspired neural network that could successfully design search trajectories. A fuzzy algorithm was added to the bio-inspired neural network to smooth out the AUV obstacle avoidance trajectory. Unlike existing algorithms that require repeat training to obtain the essential parameters, the suggested technique obtains all of the required parameters without the requirement for learning or training.
Kahlil et al. [
138] presented an enhanced cooperative route planning model. This research focused on the search and tracking of an underwater object. To obtain the best results, the mission was separated into search and tracing stages, with the goal of increasing the search space and decreasing the terminal error. The improvement was conducted utilizing the improved whale algorithm. The simulated results show that the suggested technique provides superior outcomes for the search and tracing phase, an improved computing performance, and well-achieved optimization for cooperative path planning of large-scale complicated issues. Daqi Zhu et al. [
139] proposed a new rapid marching-based method to extract a continuous route from an environment while taking into consideration the underwater current. Yilmaz et al. [
140] proposed the path planning issue as an optimization framework and mixed it with an integer linear programming-based technique. All of the approaches described above were evaluated in two-dimensional (2D) settings, which did not fulfill the actual requirements for AUV route planning. Hu et al. [
141], by utilizing a control rule with an attractive force toward a target and a repulsive force against obstacles, produced a vision-based autonomous robotic fish capable of 3D mobility.
An improved self-organizing map and a velocity synthesis approach were presented for multi-AUV route planning in a 3D underwater workspace [
142]. Those approaches have their own benefits, but there are certain flaws that need to be investigated further. For example, vision-based approaches perform poorly in an underwater environment; certain evolution-based methods are difficult to compute; and methods based on the premise that underwater habitats are totally known are unsuitable for the real world. Yuan and Qu [
143] devised an optimum real-time collision-free AUV route in an unknown 3D underwater environment. The 3D motion planning issue was reduced to a 2D problem in their technique, resulting in a significant reduction in processing costs.
3.3. Hybrid Techniques
After elaborating on numerical and nature-inspired techniques, this section presents detailed information on hybridized algorithms and their related path optimization for land, aerial, and underwater applications.
3.3.1. Application to Aerial Vehicles
Hassan et al. [
144] used the traveling salesman method for maximum UAV area coverage. The authors integrated PSO with the GA algorithm to suggest multiple paths for multiple UAVs and to further propose the parallel version of both algorithms. The authors intelligently exploited PSO and GA to avoid local minima and to pick up the quality of the output in a minimum amount of time. Statistical data obtained from the simulated results prove that the proposed method provides promising results. Arantes et al. [
145] presented the integration of the genetic algorithm with the visibility graph method to decode the path in an uncertain environment under convex-shaped obstacles. The path was further decoded by linear programming methods to solve each individual path separately. Under the set, 50 different maps that proposed heuristic approaches were tested and the obtained outputs depicted promising results.
Dhargupta et al. [
146] presented the integration of RL with the GWO algorithm for a smoother and more efficient flight path for UAVs. Furthermore, the authors in [
132] presented a novel algorithm for UAV path planning by combining RL with the GWO optimizer. The algorithm helps in generating a refined clean trajectory for UAVs. The adjustment of stochastic parameters for GWO helps in generating a smoother path. Similarly, a number of authors have also worked on obstacle avoidance. Bouhamed et al. [
147] came up with an efficient UAV that glided and, at the same time, avoided static and dynamic objects. The authors utilized the deep deterministic policy gradient (DDPG) learning algorithm, which used a reward function to help detect the target and avoid obstacles. The reward function also helped to diminish the distance between the UAV’s initial step to its final step. A penalty function was added to catch the anomaly in the algorithm. Another method was presented by Challita et al. [
148], which depicts numerous sub-challenges for UAVs. The authors discussed the intervention cause during path planning from the ground.
3.3.2. Application to Ground Vehicles
Pengchao Zhang et al. [
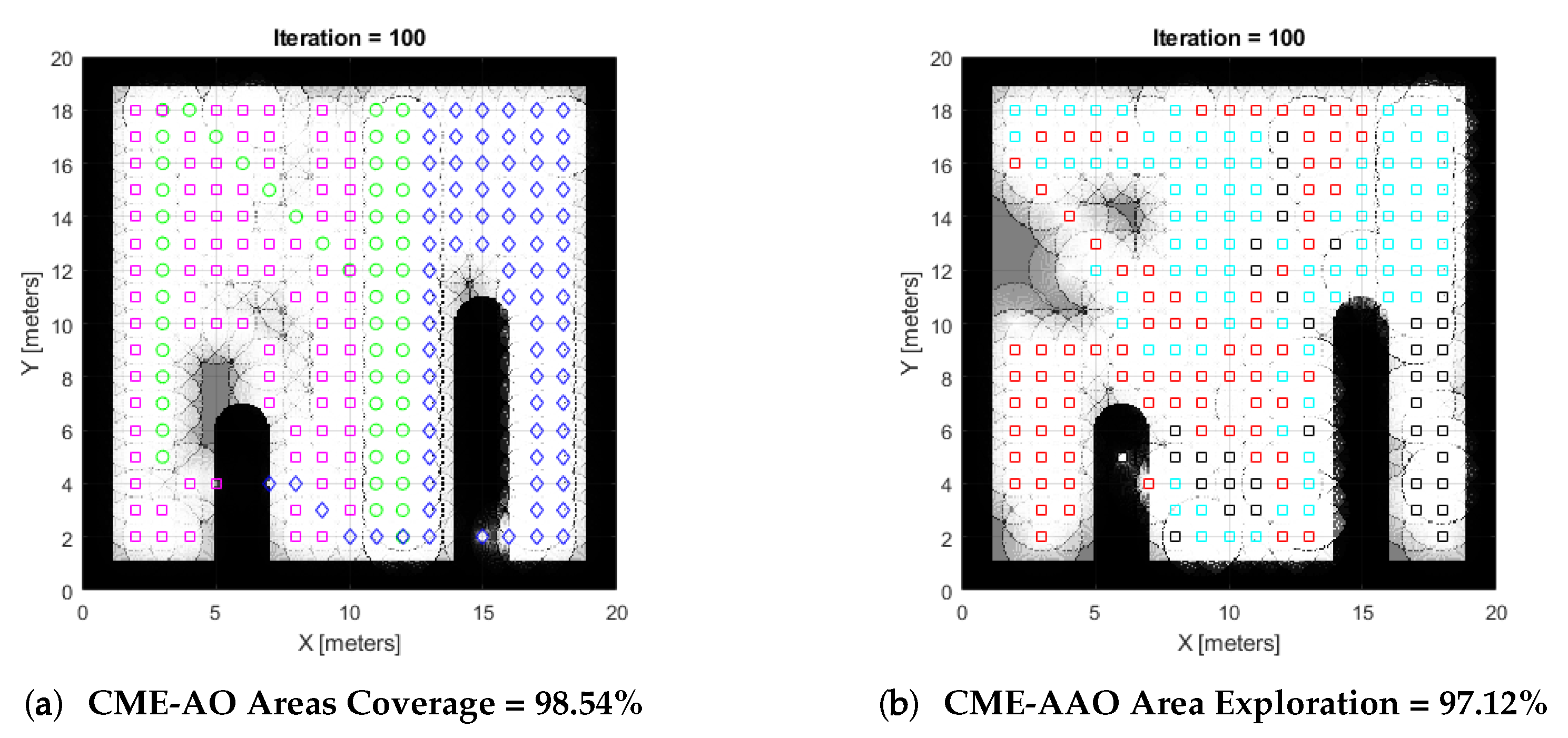
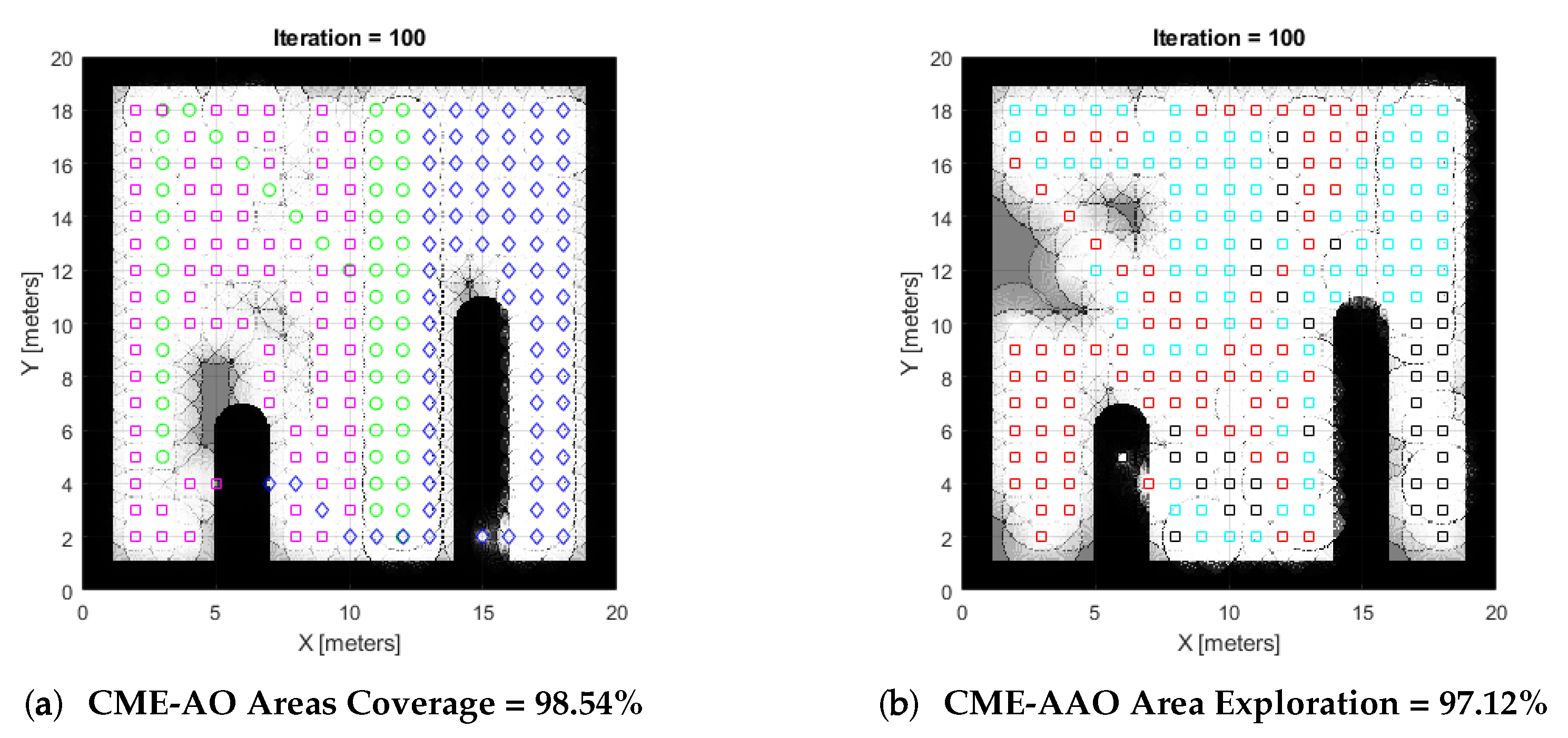
149] argued that combining classical algorithms with heuristic programming algorithms based on AI yields beneficial outcomes. To modify the functions of path smoothness and path planning, the classic quickly exploring random tree approach was combined with a neural network. The simulations were run in real-time to test the viability of the modified method, which produced better outcomes when dealing with navigation challenges. Faiza et al. [
150] presented a novel approach for space surfing by combining the deterministic method with an up-to-date bio-inspired method. The coordinated multi-agent exploration combined with the Arithmetic Algorithm helped to achieve a rate of exploration much higher when compared to contemporary methods. The rates of the failed simulation runs were also lesser than the compared algorithms. Bakdi et al. [
151] demonstrated a robot with a camera for trajectory planning. All data obtained from the environment was processed using IM techniques, and GA was utilized to generate the best trajectory to connect the starting point with the destination point. GA was also used with a piecewise cubic Hermite interpolating polynomial to smoothen the route. Finally, an adaptive fuzzy logic controller was used to maintain track of the vehicle’s left and right wheel velocities.
3.3.3. Underwater Vehicles
Wenjie Chen et al. [
152] offered a technique to obtain quality photos of underwater localization since previously-reported algorithms, such as simultaneous localization and mapping (SLAM), lacked feature-based extraction qualities, resulting in fuzzy images. To address this issue, a novel technology called visual SLAM employs generative adversarial networks to improve picture quality using assessment criteria. This increases the SLAM efficiency and delivers improved localization and accuracy. The suggested approach was tested on many photos with various amounts of turbidity in the water. For fault resilience challenges in autonomous underwater vehicles, the authors of [
153] developed a moth flame optimization algorithm for AUVs. AUVs have a difficult time communicating; hence, a fast network is required to send data packets back to the station. To tackle the failure problem, MFO develops a unique fitness function. The suggested methods for AUVs have been evaluated and were found to be successful.


 ,
, 

{kind=link}
{kind=link}
{kind=link}