
Synthetic Infra-Red Image Evaluation Methods by Structural Similarity Index Measures


Abstract
:1. Introduction
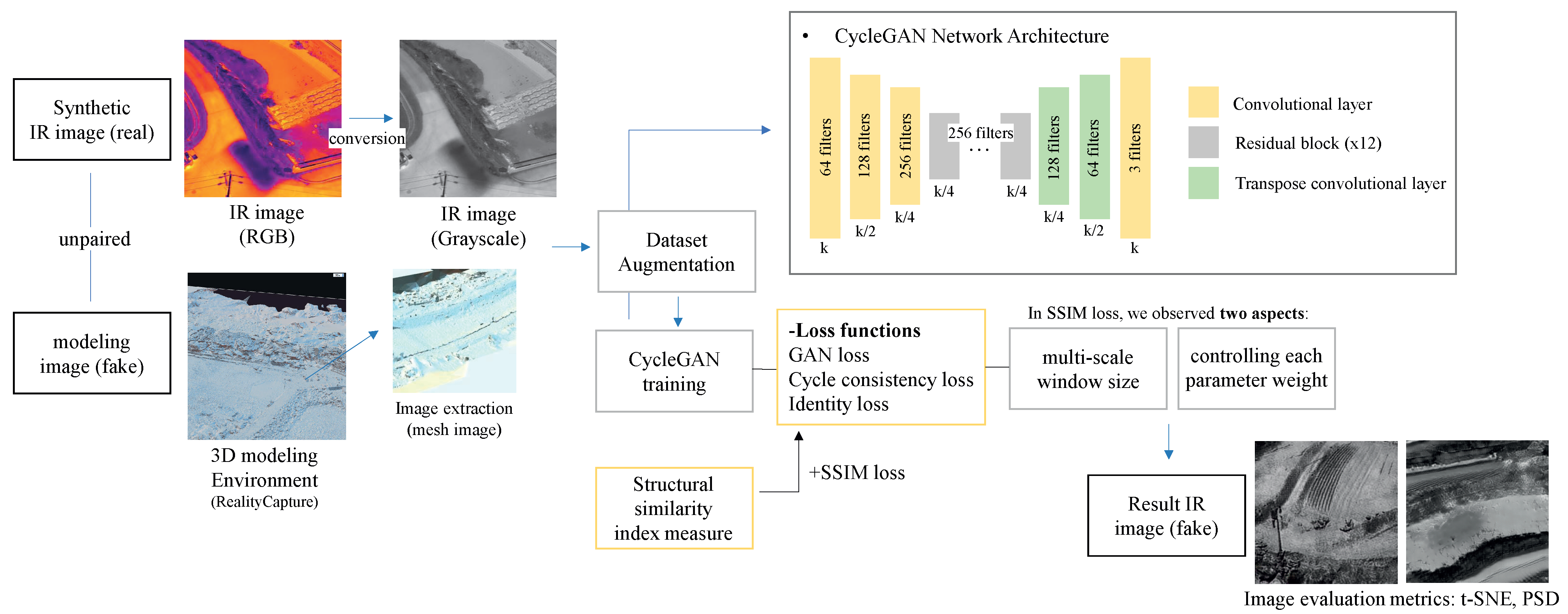
- A modified network based on CycleGAN is proposed for realistic synthetic IR image generation by applying the SSIM loss function.
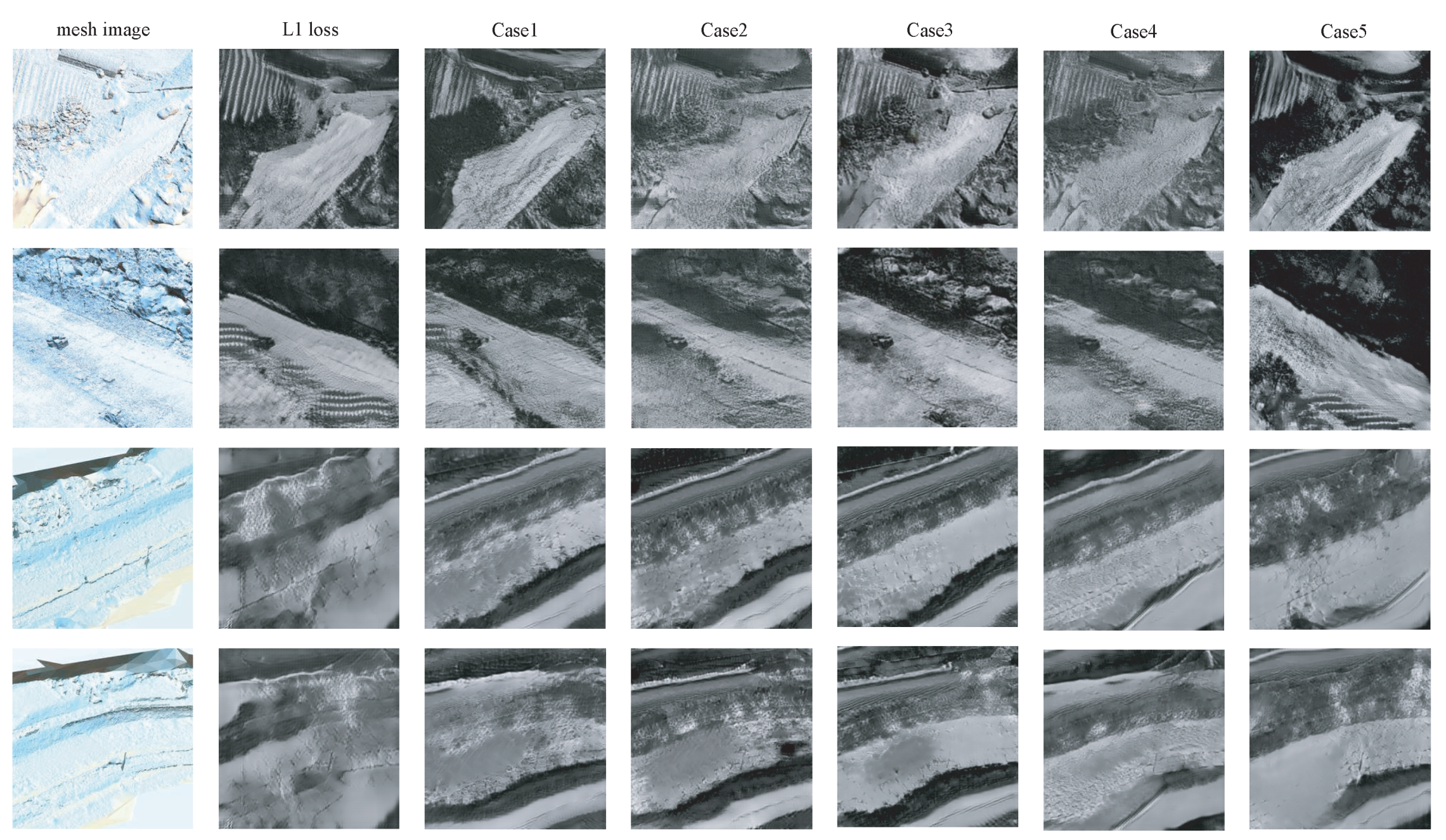
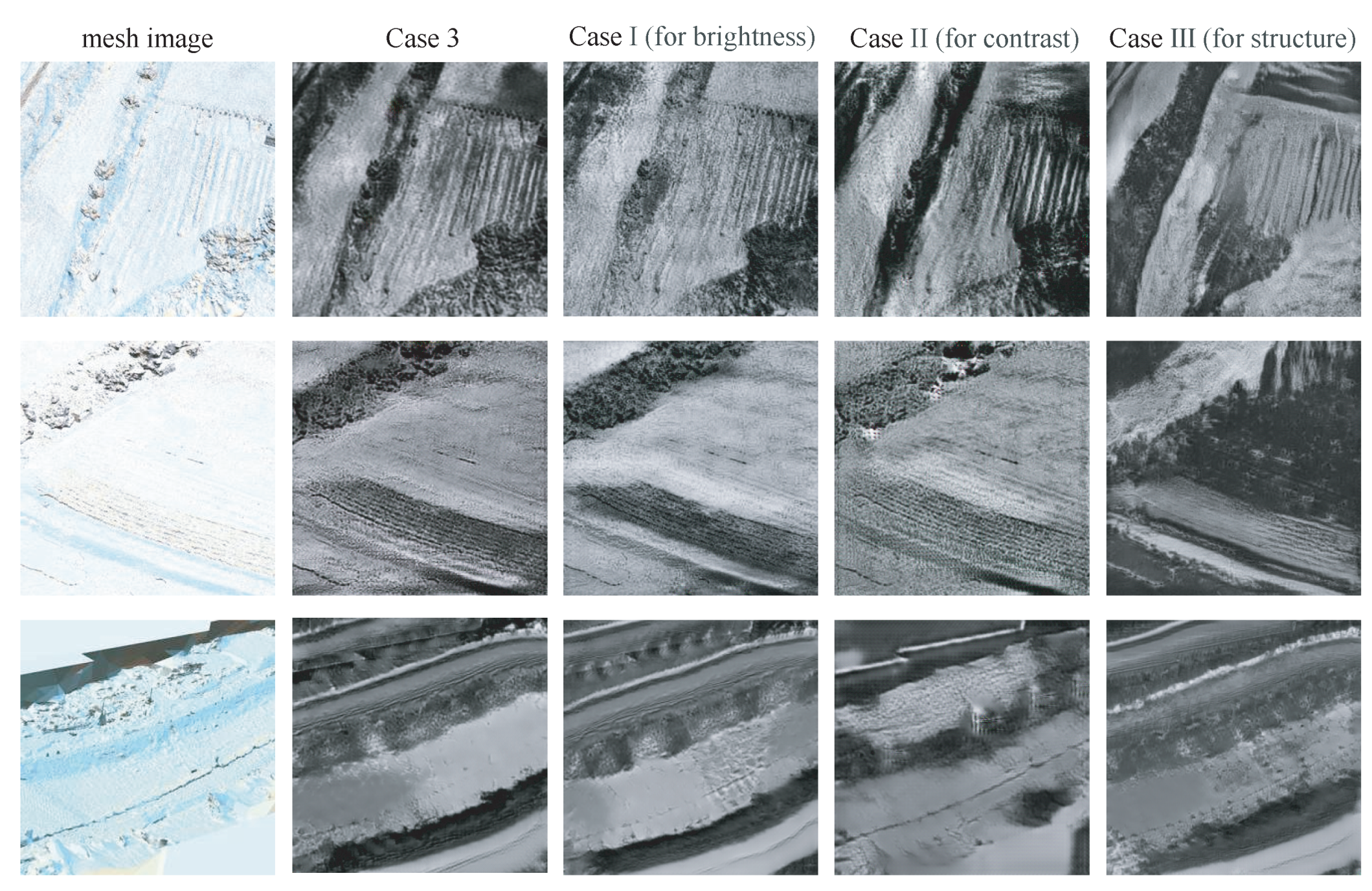
- Various parametric analyses are performed for adjusting synthetic image details generated by the generative model according to the window size and weighting parameters of the SSIM loss.
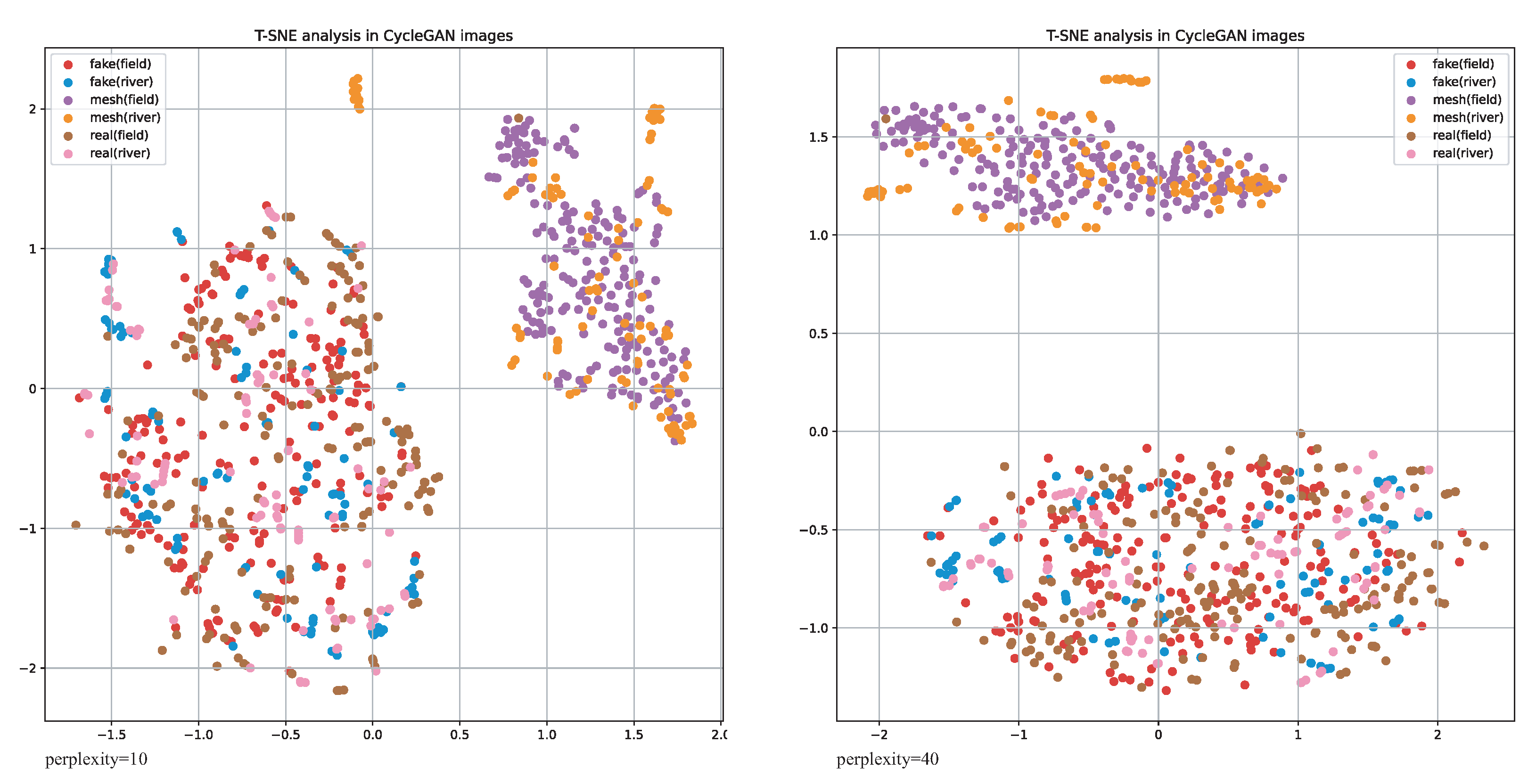
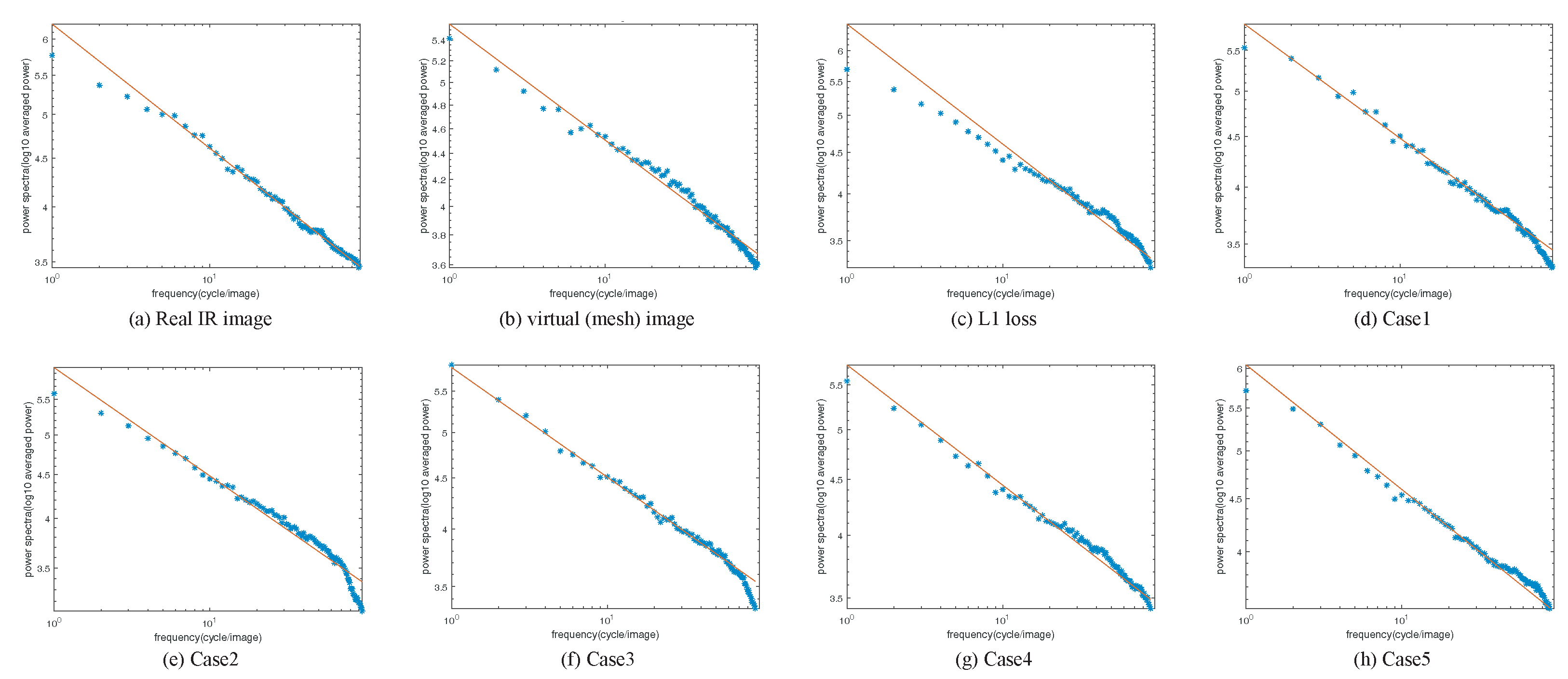
- The t-SNE and power spectral density (PSD) are proposed as evaluation metrics for image similarity analysis.
2. Theoretical Background
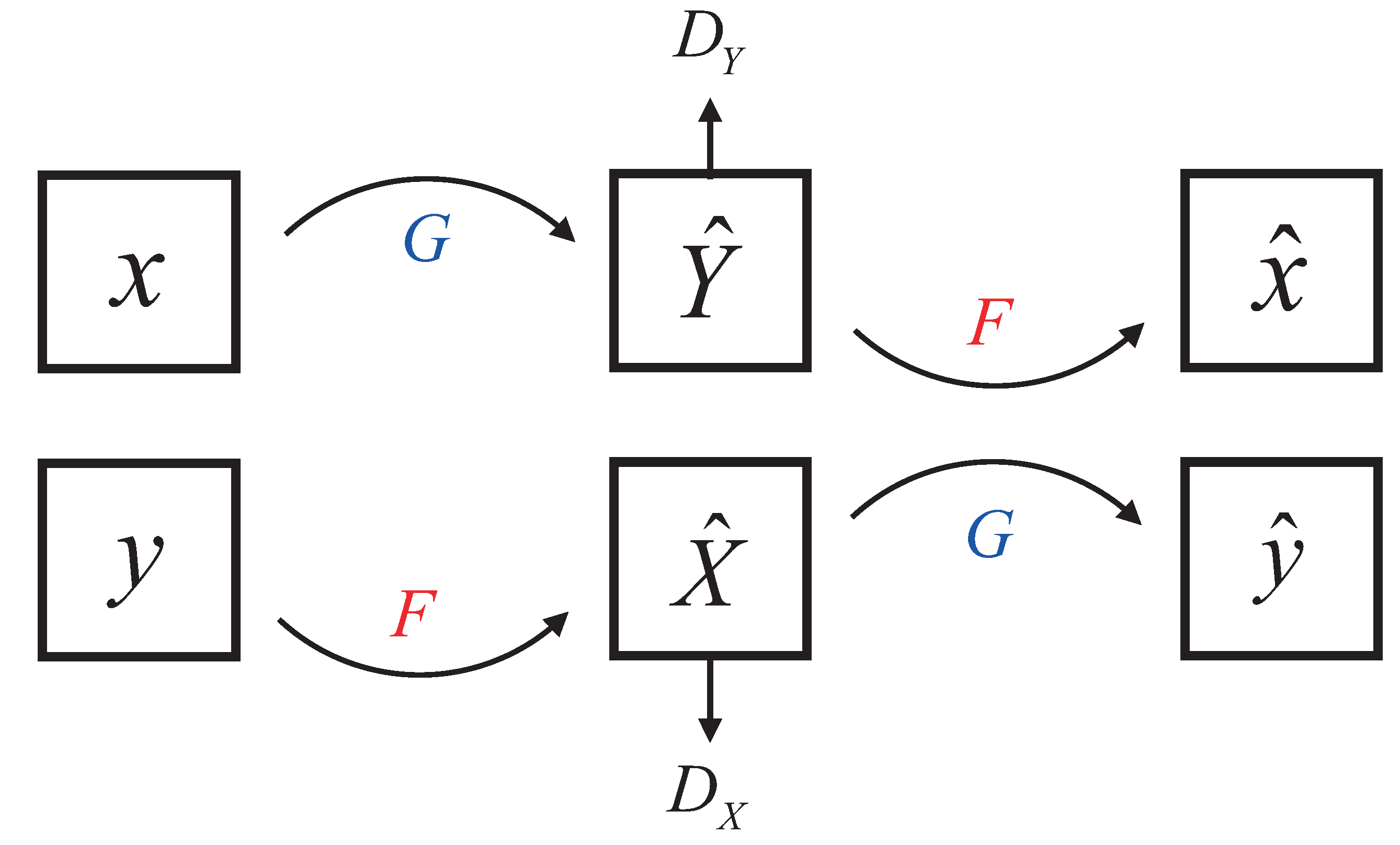
2.1. Generative Adversarial Network
2.2. Structural Similarity Index Measure
2.3. Evaluation Metrics
3. Materials and Method
3.1. CycleGAN Network Architecture
3.2. Loss Function for CycleGAN Training
4. Simulation Results
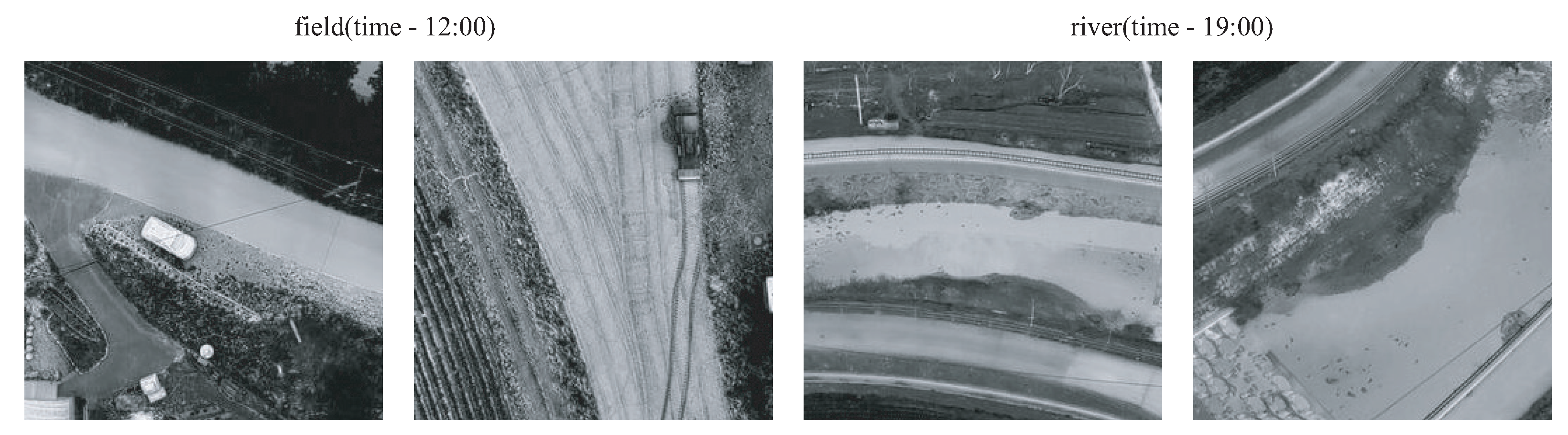
4.1. Dataset and Training Details
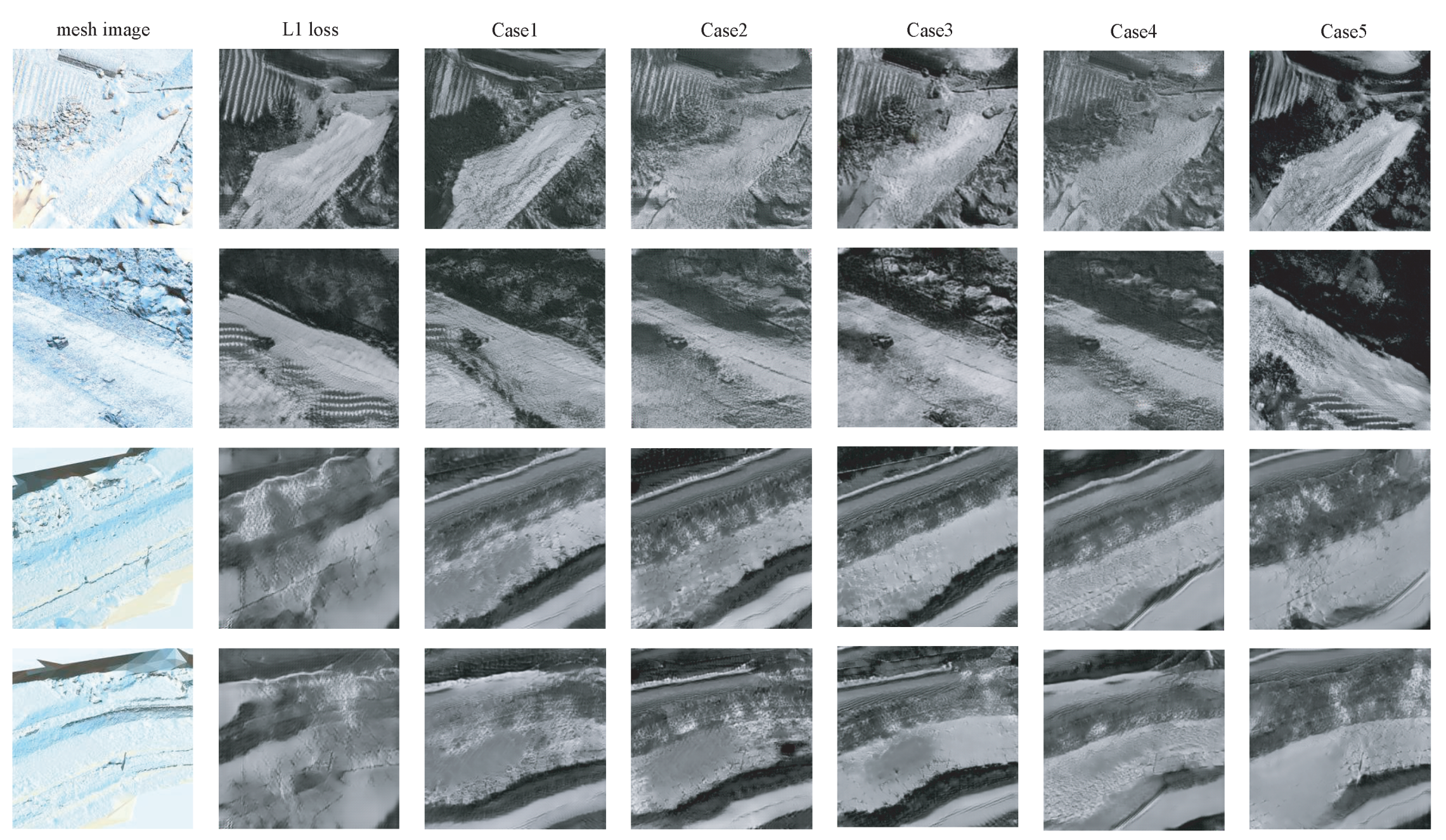
4.2. Experimental Study
4.3. IR Image Similarity Analysis
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 3D | Three-dimensional |
| AI | Artificial intelligence |
| cGAN | Conditional generative adversarial network |
| FID | Fréchet inception distance |
| CNN | Convolution neural network |
| GAN | Generative adversarial network |
| IR | Infra-red |
| IS | Inception score |
| MSE | Mean square error |
| PCA | Principal component analysis |
| PSD | Power spectrum density |
| PSNR | Peak signal-to-noise ratio |
| ROI | Region of Interest |
| SNE | Stochastic neighbor embedding |
| SSIM | Structural similarity index measure |
| t-SNE | t-distributed stochastic neighbor embedding |
| VIS | Visible |
References
- Zhang, R.; Mu, C.; Xu, M.; Xu, L.; Shi, Q.; Wang, J. Synthetic IR image refinement using adversarial learning with bidirectional mappings. IEEE Access 2019, 7, 153734–153750. [Google Scholar] [CrossRef]
- Kniaz, V.V.; Gorbatsevich, V.S.; Mizginov, V.A. Thermalnet: A deep convolutional network for synthetic thermal image generation. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2017, 42, 41. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. arXiv 2014, arXiv:1406.2661. [Google Scholar] [CrossRef]
- Radford, A.; Metz, L.; Chintala, S. Unsupervised representation learning with deep convolutional generative adversarial networks. arXiv 2015, arXiv:1511.06434. [Google Scholar]
- Karras, T.; Aila, T.; Laine, S.; Lehtinen, J. Progressive growing of gans for improved quality, stability, and variation. arXiv 2017, arXiv:1710.10196. [Google Scholar]
- Karras, T.; Laine, S.; Aila, T. A style-based generator architecture for generative adversarial networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 4401–4410. [Google Scholar]
- Karras, T.; Aittala, M.; Hellsten, J.; Laine, S.; Lehtinen, J.; Aila, T. Training generative adversarial networks with limited data. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; Volume 33, pp. 12104–12114. [Google Scholar]
- Huang, X.; Belongie, S. Arbitrary style transfer in real-time with adaptive instance normalization. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 1501–1510. [Google Scholar]
- Mirza, M.; Osindero, S. Conditional Generative Adversarial Nets. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Phillip, I.; Jun-Yan, Z.; Tinghui, Z.; Alexei, A.E. Image-to-Image Translation with Conditional Adversarial Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Zhu, J.-Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2223–2232. [Google Scholar]
- Li, W.; Wang, J. Residual learning of cycle-GAN for seismic data denoising. IEEE Access 2021, 9, 11585–11597. [Google Scholar] [CrossRef]
- Maniyath, S.R.; Vijayakumar, K.; Singh, L.S.; Sudhir, K.; Olabiyisi, T. Learning-based approach to underwater image dehazing using CycleGAN. IEEE Access 2021, 14, 1–11. [Google Scholar] [CrossRef]
- Engin, D.; Genç, A.; Kemal Ekenel, H. Cycle-dehaze: Enhanced cyclegan for single image dehazing. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 825–833. [Google Scholar]
- Teng, L.; Fu, Z.; Yao, Y. Interactive translation in echocardiography training system with enhanced cycle-GAN. IEEE Access 2020, 8, 106147–106156. [Google Scholar] [CrossRef]
- Hammami, M.; Friboulet, D.; Kéchichian, R. Cycle GAN-based data augmentation for multi-organ detection in CT images via Yolo. In Proceedings of the 2020 IEEE International Conference on Image Processing (ICIP), Negombo, Sri Lanka, 6–8 March 2020; pp. 390–393. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, H.; Gallo, O.; Frosio, I.; Kautz, J. Loss Functions for Image Restoration With Neural Networks. IEEE Trans. Comp. Imaging 2016, 3, 47–57. [Google Scholar] [CrossRef]
- Hwang, J.; Yu, C.; Shin, Y. SAR-to-optical image translation using SSIM and perceptual loss based cycle-consistent GAN. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 191–194. [Google Scholar]
- Tao, L.; Zhu, C.; Xiang, G.; Li, Y.; Jia, H.; Xie, X. LLCNN: A convolutional neural network for low-light image enhancement. In Proceedings of the 2017 IEEE Visual Communications and Image Processing (VCIP), St. Petersburg, FL, USA, 10–13 December 2017; pp. 1–4. [Google Scholar]
- Shi, H.; Wang, L.; Zheng, N.; Hua, G.; Tang, W. Loss functions for pose guided person image generation. Pattern Recognit. 2022, 122, 108351. [Google Scholar] [CrossRef]
- Yu, J.; Wu, B. Attention and hybrid loss guided deep learning for consecutively missing seismic data reconstruction. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–8. [Google Scholar] [CrossRef]
- Salimans, T.; Goodfellow, I.; Zaremba, W.; Cheung, V.; Radford, A.; Chen, X. Improved techniques for training gans. Adv. Neural Inf. Process. Syst. 2016, 29, 2234–2242. [Google Scholar]
- Brock, A.; Donahue, J.; Simonyan, K. Large scale GAN training for high fidelity natural image synthesis. arXiv 2018, arXiv:1809.11096. [Google Scholar]
- Barratt, S.; Sharma, R. Robust Backstepping Control of Robotic Systems Using Neural Networks. arXiv 2018, arXiv:1801.01973. [Google Scholar]
- Martin, H.; Hubert, R.; Thomas, U.; Bernhard, N.; Sepp, H. Gans trained by a two time-scale update rule converge to a local nash equilibrium. Adv. Neural Inf. Process. Syst. 2017, 30, 6626–6637. [Google Scholar]
- Obukhov, A.; Krasnyanskiy, M. Quality assessment method for GAN based on modified metrics inception score and Fréchet inception distance. In Proceedings of the Computational Methods in Systems and Software, Online, 14–17 October 2020; pp. 102–114. [Google Scholar]
- Van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2695. [Google Scholar]
- Van Der Maaten, L. Accelerating t-SNE using tree-based algorithms. J. Mach. Learn. Res. 2014, 15, 3221–3245. [Google Scholar]
- Anowar, F.; Sadaoui, S.; Selim, B. Conceptual and empirical comparison of dimensionality reduction algorithms (pca, kpca, lda, mds, svd, lle, isomap, le, ica, t-sne). Comput. Sci. Rev. 2021, 40, 100378. [Google Scholar] [CrossRef]
- Spiwok, V.; Kříž, P. Time-lagged t-distributed stochastic neighbor embedding (t-SNE) of molecular simulation trajectories. Front. Mol. Biosci. 2020, 7, 132. [Google Scholar] [CrossRef] [PubMed]
- Van der Schaaf, A.; van Hateren, J.H. Modelling the Power Spectra of Natural Images: Statistics and Information. Vision Res. 1996, 36, 2759–2770. [Google Scholar] [CrossRef] [Green Version]
- Koch, M.; Denzler, J.; Redies, C. 1/f2 Characteristics and isotropy in the fourier power spectra of visual art, cartoons, comics, mangas, and different categories of photographs. PLoS ONE 2010, 5, e12268. [Google Scholar] [CrossRef]
- Pamplona, D.; Triesch, J.; Rothkopf, C.A. Power spectra of the natural input to the visual system. Vision Res. 2013, 83, 66–75. [Google Scholar] [CrossRef] [Green Version]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- He, K.; Zhang, X.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Hore, A.; Ziou, D. Image quality metrics: PSNR vs. SSIM. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Washington, DC, USA, 23–26 August 2010; pp. 2366–2369. [Google Scholar]
- Jolliffe, I.T.; Cadima, J. Principal component analysis: A review and recent developments. R. Soc. Publ. 2016, 374, 20150202. [Google Scholar] [CrossRef]
- Hinton, G.E.; Roweis, S. Stochastic neighbor embedding. Adv. Neural Inf. Process. Syst. 2002, 15, 749–756. [Google Scholar]
- Wang, Z.; Simoncelli, E.P.; Bovik, A.C. Multiscale structural similarity for image quality assessment. In Proceedings of the Thrity-Seventh Asilomar Conference on Signals, Systems & Computers, Pacific Grove, CA, USA, 9–12 November 2003; Volume 2, pp. 1398–1402. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | References | Year of Publish | Description |
|---|---|---|---|
| Generative adversarial network | [4] | 2014 | Generator and discriminator learn adversarial and estimate generative models |
| [11] | 2017 | Image-to-Image translation, adding traditional loss () to improve image quality using conditional GAN | |
| [12] | 2017 | Transformation between unpaired images using cGAN, adding cycle consistency loss to cover the real data distribution | |
| Image quality evaluation metrics | [38] | 2010 | Information on loss of quality of images generated or compressed with a signal-to-noise ratio |
| [18] | 2004 | A method designed to evaluate human visual quality differences and not numerical errors | |
| Image evaluation metrics | [24] | 2016 | GAN performance evaluation in terms of sharpness and diversity |
| [27] | 2017 | The image evaluation by comparing the real dataset and the generated dataset of the target domain | |
| [29] | 2008 | Similarity visualization in high-dimensional space in two dimensions via low-dimensional embedding learning | |
| [33] | 1996 | Visualization technique of the spatial frequency of an image using the Fourier transform |
| Attribute | Value |
|---|---|
| Description | DJI MATRICE 300 RTK |
| Weight | 6.3 kg (Including two TB60 batteries) |
| Diagonal length | 895 mm |
| Attribute | Camera Specification |
|---|---|
| Description | DJI ZENMUSE H20T |
| Sensor | Vanadium Oxide (VOx) microwave bolometer |
| Lens | DFOV: 40.6 |
| Focal length: 13.5 mm | |
| Aperture: f/1.0 | |
| Focus: 5 m∼∞ |
| Attribute | Training Machine Specification |
|---|---|
| CPU | 1 × Intel i9 X-series Processor |
| GPU | 2 × NVIDIA RTX 3090 (24 GB) |
| Mem. | 192 GB |
| Weight Parameter | Case 1 | Case 2 | Case 3 | Case 4 | Case 5 |
|---|---|---|---|---|---|
| 1.0 | 0.6 | 0.5 | 0.4 | 0.0 | |
| 0.0 | 0.4 | 0.5 | 0.6 | 1.0 |
| Weight Parameter | Case I (for Brightness) | Case II (for Contrast) | Case III (for Structure) |
|---|---|---|---|
| 20 | 1 | 1 | |
| 1 | 20 | 1 | |
| 1 | 1 | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.H.; Leeghim, H. Synthetic Infra-Red Image Evaluation Methods by Structural Similarity Index Measures. Electronics 2022, 11, 3360. https://doi.org/10.3390/electronics11203360
Lee SH, Leeghim H. Synthetic Infra-Red Image Evaluation Methods by Structural Similarity Index Measures. Electronics. 2022; 11(20):3360. https://doi.org/10.3390/electronics11203360
Chicago/Turabian StyleLee, Sky H., and Henzeh Leeghim. 2022. "Synthetic Infra-Red Image Evaluation Methods by Structural Similarity Index Measures" Electronics 11, no. 20: 3360. https://doi.org/10.3390/electronics11203360
APA StyleLee, S. H., & Leeghim, H. (2022). Synthetic Infra-Red Image Evaluation Methods by Structural Similarity Index Measures. Electronics, 11(20), 3360. https://doi.org/10.3390/electronics11203360