
A Time-Varying PD Sliding Mode Control Method for the Container Crane Based on a Radial-Spring Damper

 , ,
, ,
Abstract
:1. Introduction
- (1)
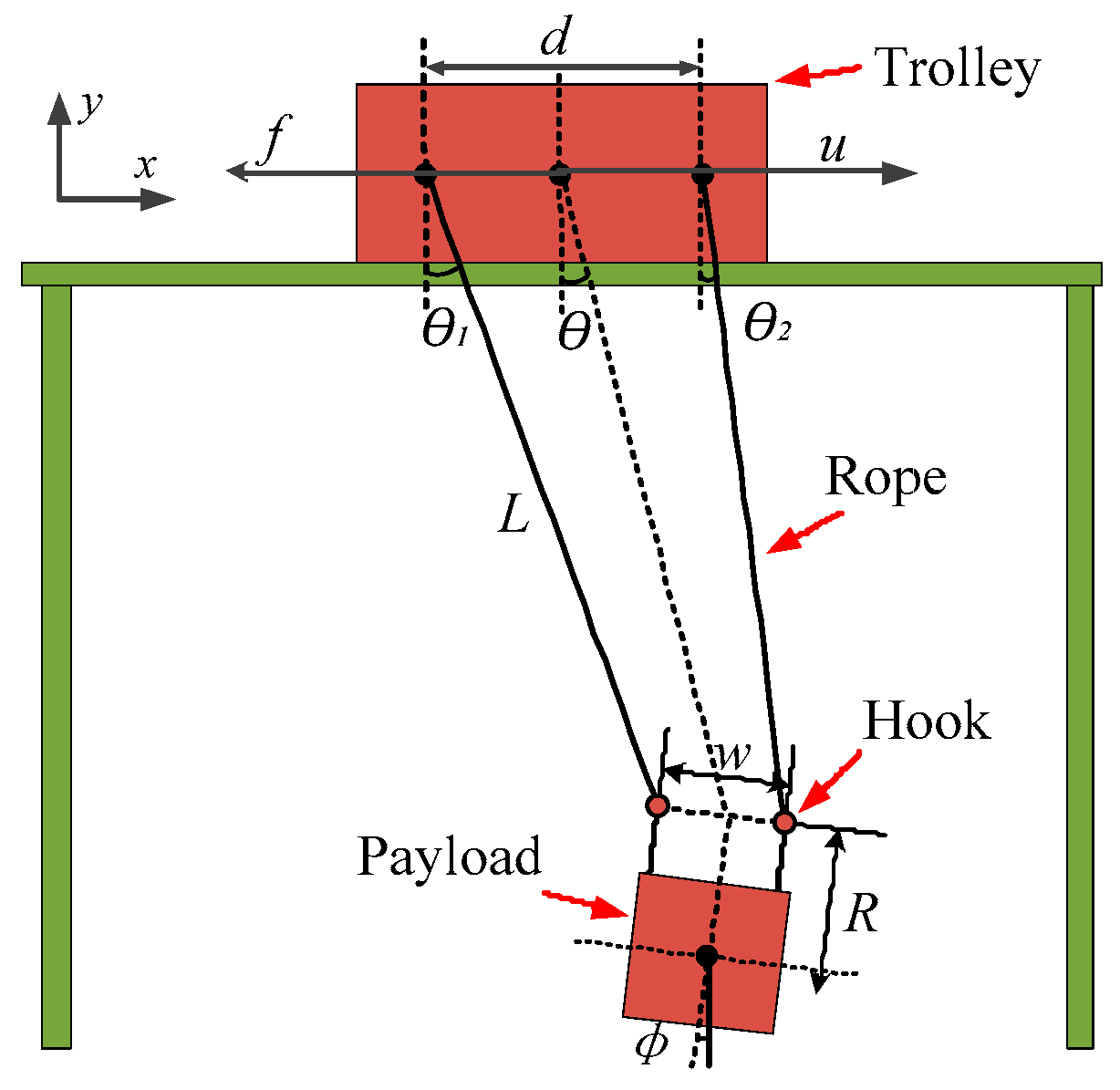
- Compared with the conventional double pendulum model, the proposed model in this paper does not need to measure the second pendulum angle, which reduces the difficulty of engineering applications and ensures the accuracy of the model;
- (2)
- The time-varying PD sliding mode controller proposed in this paper reduces the arrival time of the sliding mode surface, enhances the coupling between the system state quantities, has high global robustness and better transient performance, and is verified by simulation experiments;
- (3)
- In this paper, a new switching function is adopted to replace the original symbolic function, which effectively eliminates the chattering phenomenon of the sliding mode.
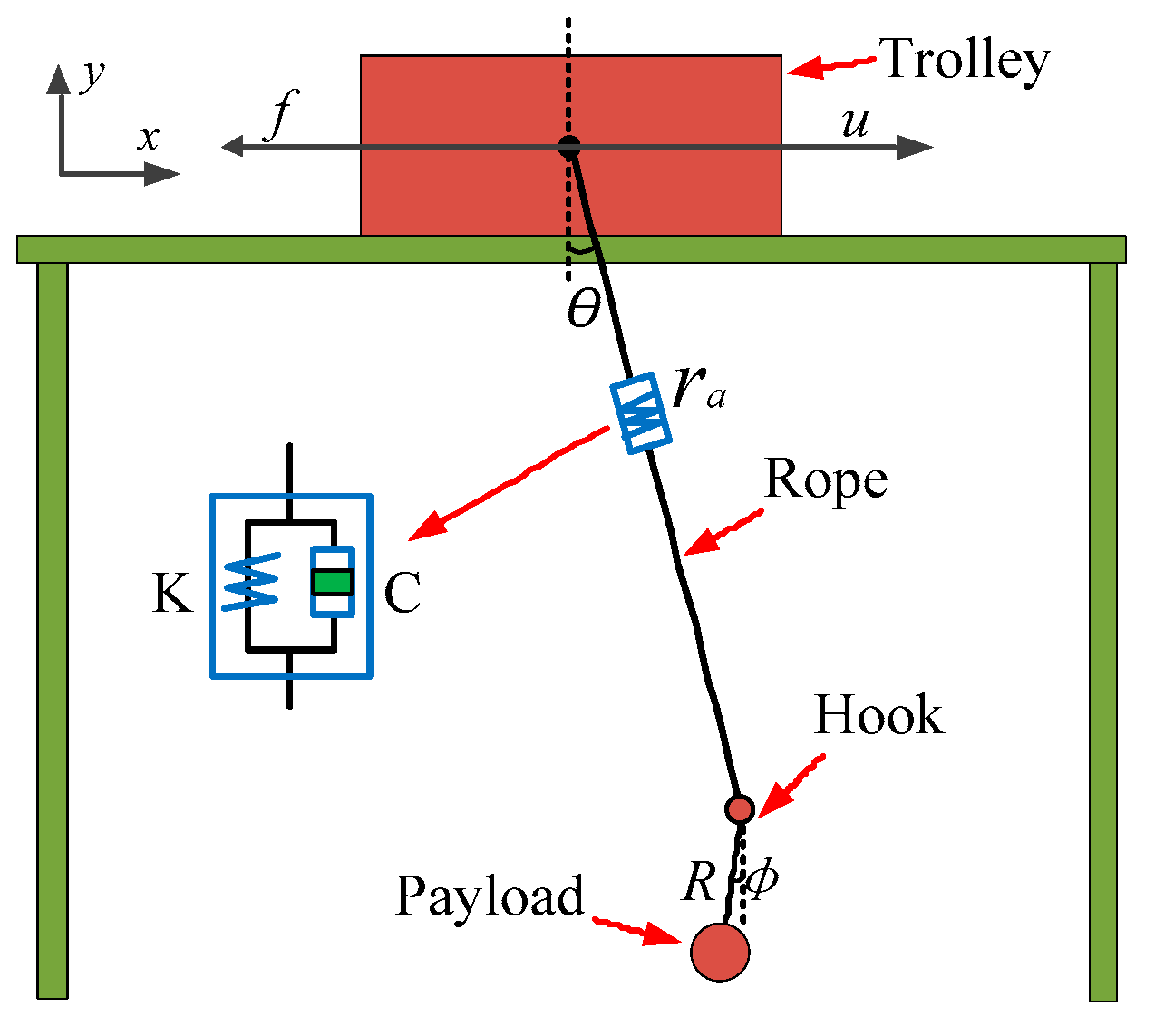
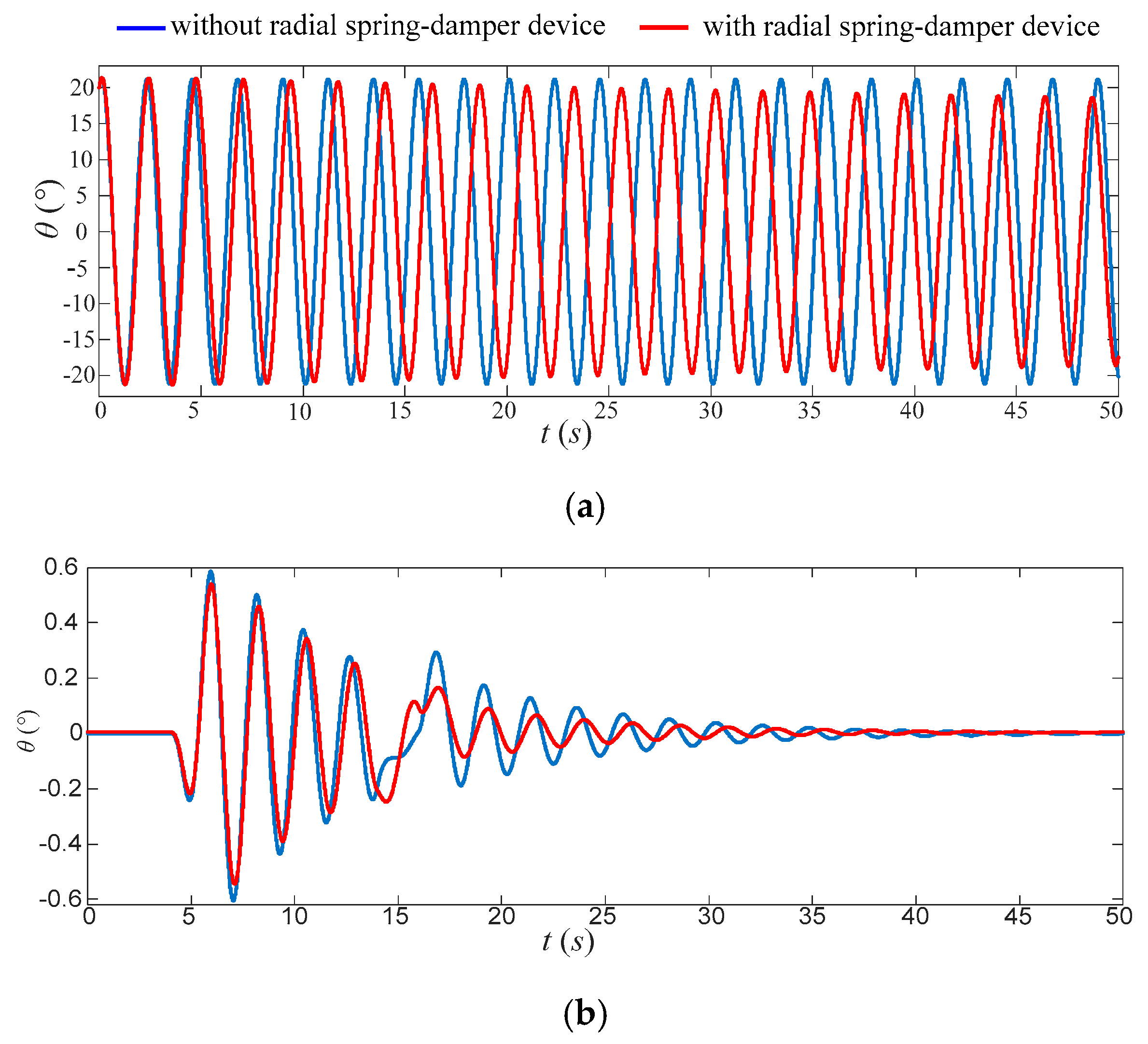
2. 2D Container Crane System Model
3. Controller Design and Stability Analysis
3.1. TVPD-SMC Design
3.2. Stability Analysis
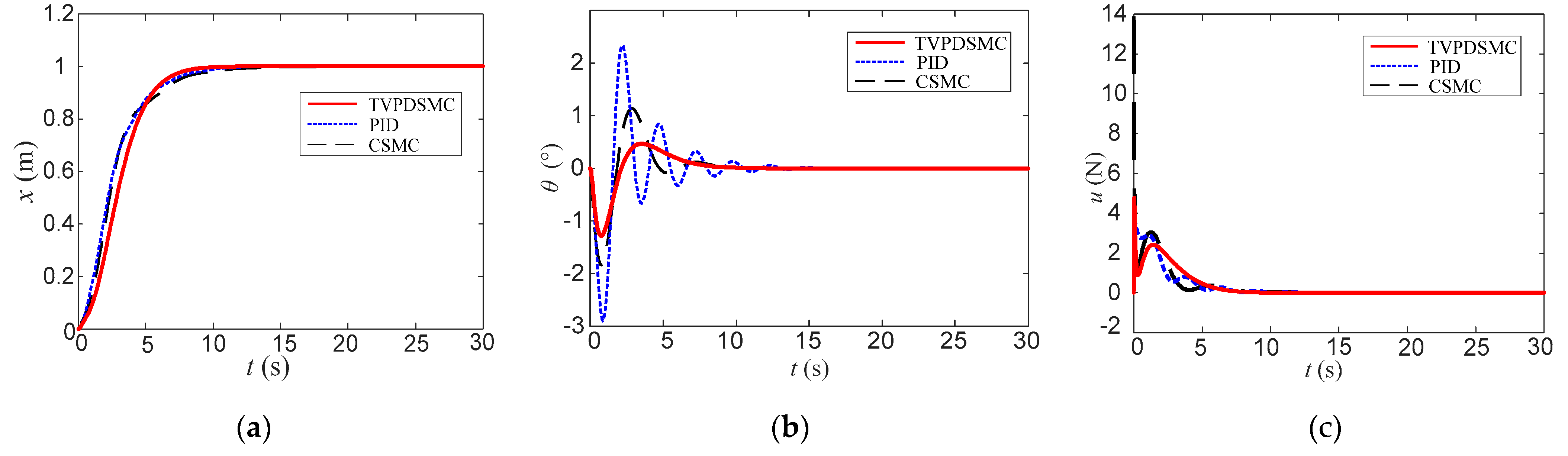
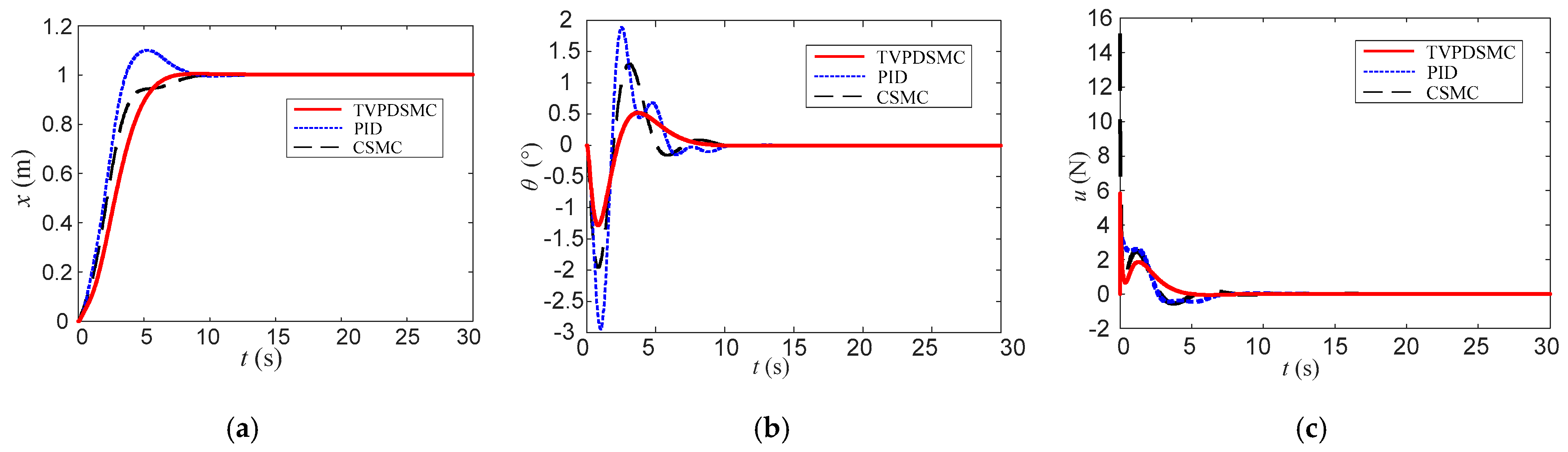
4. Simulation Results and Analysis
- (1)
- PID control law:
- (2)
- CSMC control law:
- (1)
- Sinusoidal disturbances with a relative amplitude of 15% and a frequency of 3.14 Hz between 11 s and 13 s.
- (2)
- Pulsed disturbances with a relative amplitude of 15% and a pulse width of 0.2 s between 19 s and 19.2 s.
- (3)
- Random disturbances with a relative amplitude of 15% between 24 s and 26 s.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ramli, L.; Mohamed, Z.; Abdullahi, A.M.; Jaafar, H.I.; Lazim, I.M. Control strategies for crane systems: A comprehensive review. Mech. Syst. Signal Process. 2017, 95, 1–23. [Google Scholar] [CrossRef]
- Khatamianfar, A.; Savkin, A.V. Real-time robust and optimized control of a 3D overhead crane system. Sensors 2019, 19, 3429. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, B.; Fang, Y.; Sun, N. Nonlinear control for underactuated multi-rope cranes: Modeling, theoretical design and hardware experiments. Control Eng. Pract. 2018, 76, 123–132. [Google Scholar] [CrossRef]
- Kim, C.S.; Hong, K.S. Boundary control of container cranes from the perspective of controlling an axially moving string system. Int. J. Control Autom. Syst. 2009, 7, 437–445. [Google Scholar] [CrossRef]
- Park, H.; Chwa, D.K.; Hong, K.S. A feedback linearization control of container cranes: Varying rope length. Int. J. Control Autom. Syst. 2007, 5, 379–387. [Google Scholar]
- Xu, W.; Gu, W.; Shen, A.; Chu, J.; Niu, W. Anti-swing control of a new container crane with fuzzy uncertainties compensation. In Proceedings of the 2011 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE 2011), Taipei, Taiwan, China, 27–30 June 2011. [Google Scholar]
- Lu, B.; Fang, Y.; Sun, N. Adaptive trajectory tracking control for a four-rope crane. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea (South), 7–11 July 2015. [Google Scholar]
- Kim, G.; Hong, K. Adaptive Sliding-Mode Control of an Offshore Container Crane with Unknown Disturbances. IEEE/ASME Trans. Mechatron. 2019, 24, 2850–2861. [Google Scholar]
- Lu, B.; Fang, Y.; Sun, N. Modeling and verification for a four-rope crane. In Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015. [Google Scholar]
- Masoud, Z.N.; Nayfeh, A.H. Sway reduction on container cranes using delayed feedback controller. Nonlinear Dyn. 2003, 34, 347–358. [Google Scholar] [CrossRef]
- Masoud, Z.N.; Daqaq, M.F. A graphical approach to input-shaping control design for container cranes with hoist. IEEE Trans. Control Syst. Technol. 2006, 14, 1070–1077. [Google Scholar] [CrossRef]
- Lu, B.; Cao, H.; Hao, Y.; Lin, J.; Fang, Y. Online Antiswing Trajectory Planning for a Practical Rubber Tire Container Gantry Crane. IEEE Trans. Ind. Electron. 2021, 69, 6193–6203. [Google Scholar] [CrossRef]
- Barbosa, F.M.; Löfberg, J. Time-optimal control of cranes subject to container height constraints. arXiv 2022, arXiv:2203.15360. [Google Scholar]
- Wang, N.; Cao, G.; Yan, L.; Wang, L. Modeling and control for a multi-rope parallel suspension lifting system under spatial distributed tensions and multiple constraints. Symmetry 2018, 10, 412. [Google Scholar] [CrossRef] [Green Version]
- Hoang, U.T.T.; Le, H.X.; Thai, N.H.; Pham, H.V.; Nguyen, L. Consistency of control performance in 3d overhead cranes under payload mass uncertainty. Electronics 2020, 9, 657. [Google Scholar] [CrossRef] [Green Version]
- Park, H.C.; Chakir, S.; Kim, Y.B.; Lee, D.H. A Robust Payload Control System Design for Offshore Cranes: Experimental Study. Electronics 2021, 10, 462. [Google Scholar] [CrossRef]
- Pham, H.V.; Hoang, Q.-D.; Pham, M.V.; Do, D.M.; Phi, N.H.; Hoang, D.; Le, H.X.; Kim, T.D.; Nguyen, L. An Efficient Adaptive Fuzzy Hierarchical Sliding Mode Control Strategy for 6 Degrees of Freedom Overhead Crane. Electronics 2022, 11, 713. [Google Scholar] [CrossRef]
- Jiang, B.; Liu, D.; Karimi, H.R.; Li, B. RBF Neural Network Sliding Mode Control for Passification of Nonlinear Time-Varying Delay Systems with Application to Offshore Cranes. Sensors 2022, 22, 5253. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Hui, Y.B.; Wang, Q.; Wang, H.X.; Wang, L.J. Design of Anti-Swing PID Controller for Bridge Crane Based on PSO and SA Algorithm. Electronics 2022, 11, 3143. [Google Scholar] [CrossRef]
- Bartolini, G.; Pisano, A.; Usai, E. Second-order sliding-mode control of container cranes. Automatica 2002, 38, 1783–1790. [Google Scholar] [CrossRef]
- Ngo, Q.H.; Nguyen, N.P.; Nguyen, C.N.; Tran, T.H.; Hong, K.S. Fuzzy sliding mode control of container cranes. Int. J. Control Autom. Syst. 2015, 13, 419–425. [Google Scholar] [CrossRef]
- Ngo, Q.H.; Nguyen, N.P.; Truong, Q.B.; Kim, G.H. Application of Fuzzy Moving Sliding Surface Approach for Container Cranes. Int. J. Control Autom. Syst. 2021, 19, 1133–1138. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, X.; Hua, L.; Xia, M. Modeling and nonlinear sliding mode controls of double pendulum cranes considering distributed mass beams, varying roped length and external disturbances. Mech. Syst. Signal Process. 2021, 158, 107756. [Google Scholar] [CrossRef]
- Bessa, W.M.; Otto, S.; Kreuzer, E.; Seifried, R. An adaptive fuzzy sliding mode controller for uncertain underactuated mechanical systems. J. Vib. Control 2019, 25, 1521–1535. [Google Scholar] [CrossRef]
- Lu, B.; Fang, Y.; Sun, N. Enhanced-coupling adaptive control for double-pendulum overhead cranes with payload hoisting and lowering. Automatica 2019, 101, 241–251. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, Y.; Cheng, X. An Enhanced Coupling PD with Sliding Mode Control Method for Underactuated Double-pendulum Overhead Crane Systems. Int. J. Control Autom. Syst. 2019, 17, 1579–1588. [Google Scholar] [CrossRef]
- Masoud, Z.; Alhazza, K.; Abu-Nada, E.; Majeed, M. A hybrid command-shaper for double-pendulum overhead cranes. J. Vib. Control 2014, 20, 24–37. [Google Scholar] [CrossRef]
- Wang, T.; Tan, N.; Zhang, X.; Liu, R.; Qiu, J.; Zhou, J.; Hao, X. An Enhanced Coupling Adaptive Sliding Mode Control Method for Casting Cranes Based on Radial Spring Damping. Math. Probl. Eng. 2022, 2022, 6519175. [Google Scholar] [CrossRef] [PubMed]
- Tuan, L.A.; Lee, S.G. Sliding mode controls of double-pendulum crane systems. J. Mech. Sci. Technol. 2013, 27, 1863–1873. [Google Scholar] [CrossRef]
- Sun, N.; Wu, Y.; Fang, Y.; Chen, H.; Lu, B. Nonlinear continuous global stabilization control for underactuated RTAC systems: Design, analysis, and experimentation. IEEE/ASME Trans. Mechatron. 2016, 22, 1104–1115. [Google Scholar] [CrossRef]
- Ma, B.; Fang, Y.; Liu, X.; Wang, P. Modeling and Simulation Platform Design for 3D Overhead Crane. J. Syst. Simul. 2009, 21, 3798–3803. (In Chinese) [Google Scholar]
- Zhang, M.; Ma, X.; Song, R.; Rong, X.; Tian, G.; Tian, X.; Li, Y. Adaptive proportional-derivative sliding mode control law with improved transient performance for underactuated overhead crane systems. IEEE/CAA J. Autom. Sin. 2018, 5, 683–690. [Google Scholar] [CrossRef]
- Chang, T.; Hurmuzlu, Y. Sliding Control Without Reaching Phase and Its Application to Bipedal Locomotion. ASME. J. Dyn. Sys. Meas. Control 1993, 115, 447–455. [Google Scholar] [CrossRef] [Green Version]
- Bartoszewicz, A.; Nowacka, A. Sliding-mode control of the third-order system subject to velocity, acceleration and input signal constraints. Int. J. Adapt. Control Signal Process. 2007, 21, 779–794. [Google Scholar] [CrossRef]
- Duc, V.L.; Youngjin, P. A Cable-Passive Damper System for Sway and Skew Motion Control of a Crane Spreader. Shock Vib. 2015, 2015, 507549. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| Trolley Mass | M | 5 kg |
| Hook Mass | m1 | 0.2 kg |
| Payload Mass | m2 | 1 kg |
| Rope Length | L | 1.5 m |
| Cable Spacing on Trolley | d | 0.2 m |
| Cable Spacing on Hook | w | 0.18 m |
| Rotational Inertia | J | 0.8 kg/m2 |
| Hook to payload Spacing | R | 0.2 m |
| Elasticity Factor | k | 120 |
| Damping Factor | c | 1.75 |
| Control Method | Control Gains |
|---|---|
| PID | kpx = 3.79, kix = 0.007, kdx = 5.611, kpθ = 1.45, kiθ = 33.76, kdθ = 0.15 |
| CSMC | α = 0.43, β = 5.05, k = 24.36, ε = 8.36 |
| TVPD-SMC | γ = 10.58, μ = 1.07, βx = 0.89, kpx = 0.19, kdx = 17.33, λx = 3.42 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Zhou, J.; Wu, Z.; Liu, R.; Zhang, J.; Liang, Y. A Time-Varying PD Sliding Mode Control Method for the Container Crane Based on a Radial-Spring Damper. Electronics 2022, 11, 3543. https://doi.org/10.3390/electronics11213543
Wang T, Zhou J, Wu Z, Liu R, Zhang J, Liang Y. A Time-Varying PD Sliding Mode Control Method for the Container Crane Based on a Radial-Spring Damper. Electronics. 2022; 11(21):3543. https://doi.org/10.3390/electronics11213543
Chicago/Turabian StyleWang, Tianlei, Jing Zhou, Zhiqin Wu, Renju Liu, Jingling Zhang, and Yanyang Liang. 2022. "A Time-Varying PD Sliding Mode Control Method for the Container Crane Based on a Radial-Spring Damper" Electronics 11, no. 21: 3543. https://doi.org/10.3390/electronics11213543