
A Novel MOGNDO Algorithm for Security-Constrained Optimal Power Flow Problems

 , , , and
, , , and
Abstract
:1. Introduction
- It offers a faster and smoother convergence, especially for difficult problems, and it strikes the perfect balance between exploration and exploitation.
- Local minima are less likely to become entangled in relaxed convergence.
- Effortlessly simple, adaptable, and simple to use
- The traditional GNDO may have issues with convergence trends or become stuck in narrow, deceptive optima for challenging optimization tasks, such as high-dimensional and multimodal problems.
- This work focuses on the mathematical modelling of the single and multiple-objective OPF issue modelled, which takes into account both conventional units and non-conventional sources of energy units, as well as FACTS devices.
- The appropriate probability density functions (PDFs) are modeled in the second stage to describe the wind power plants’ random behavior.
- Stochastic non-conventional sources of energy sources are among the single and multiple-objective OPF issues for which the Non-Dominated Sorting Generalized Normal Distribution Optimization (NSGNDO) technique is used to develop solutions.
- Studies and performance evaluations of the MOGNDO algorithm using empirical comparisons are conducted.
2. Mathematical Representations
2.1. Cost of Coal-Based Power Units
2.2. Toxic Gas Emanation
2.3. Direct Cost of Stochastic Non-Conventional Sources Plants
2.4. Indeterminate Non-Conventional Sources of Wind Power Cost
2.5. Uncertainty Models of Stochastic Wind Units
2.6. Average Power Calculation for Wind Plants
2.7. Wind Power Probabilities Calculation
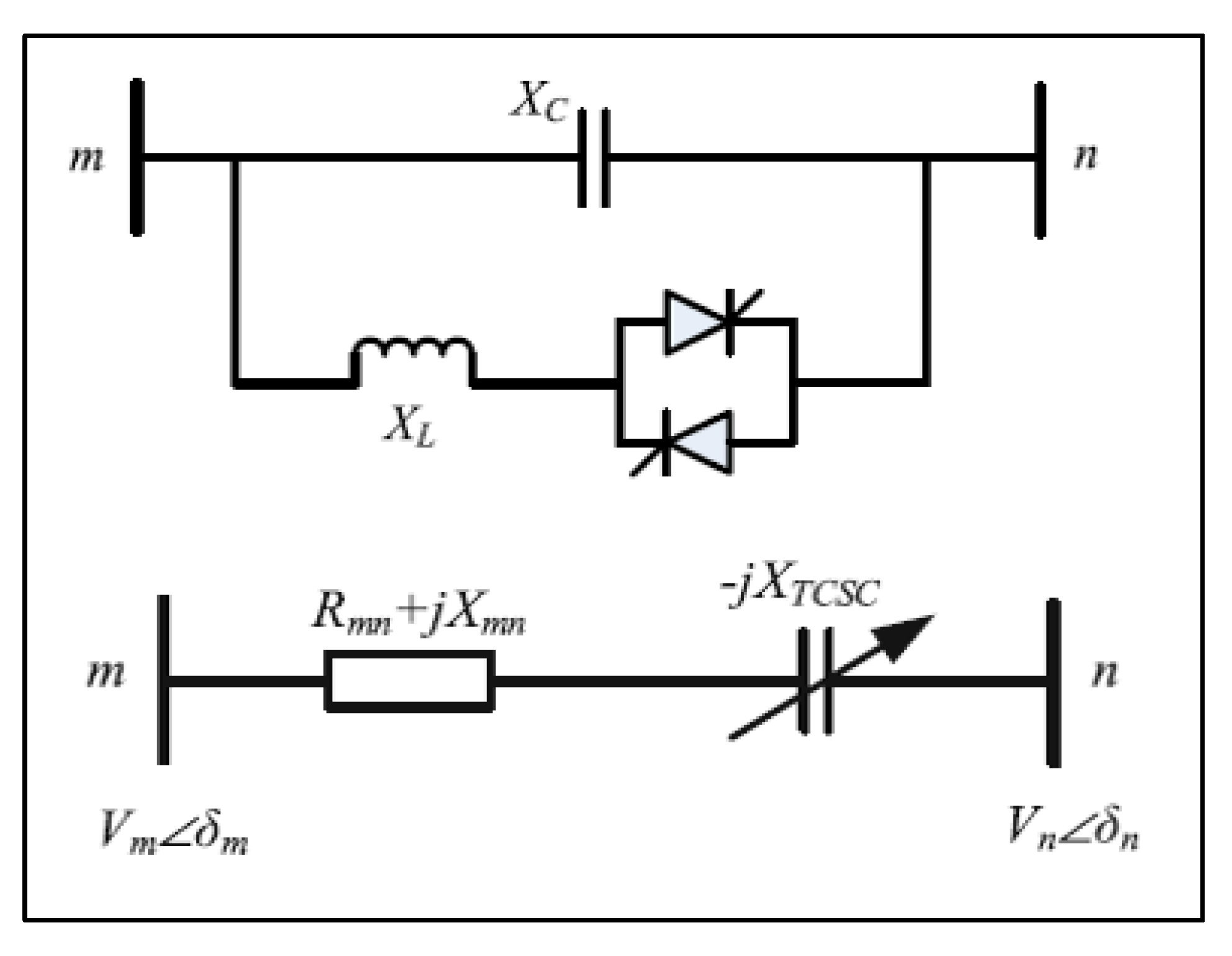
2.8. Thyristor-Controlled Series Compensator (TCSC) Modeling
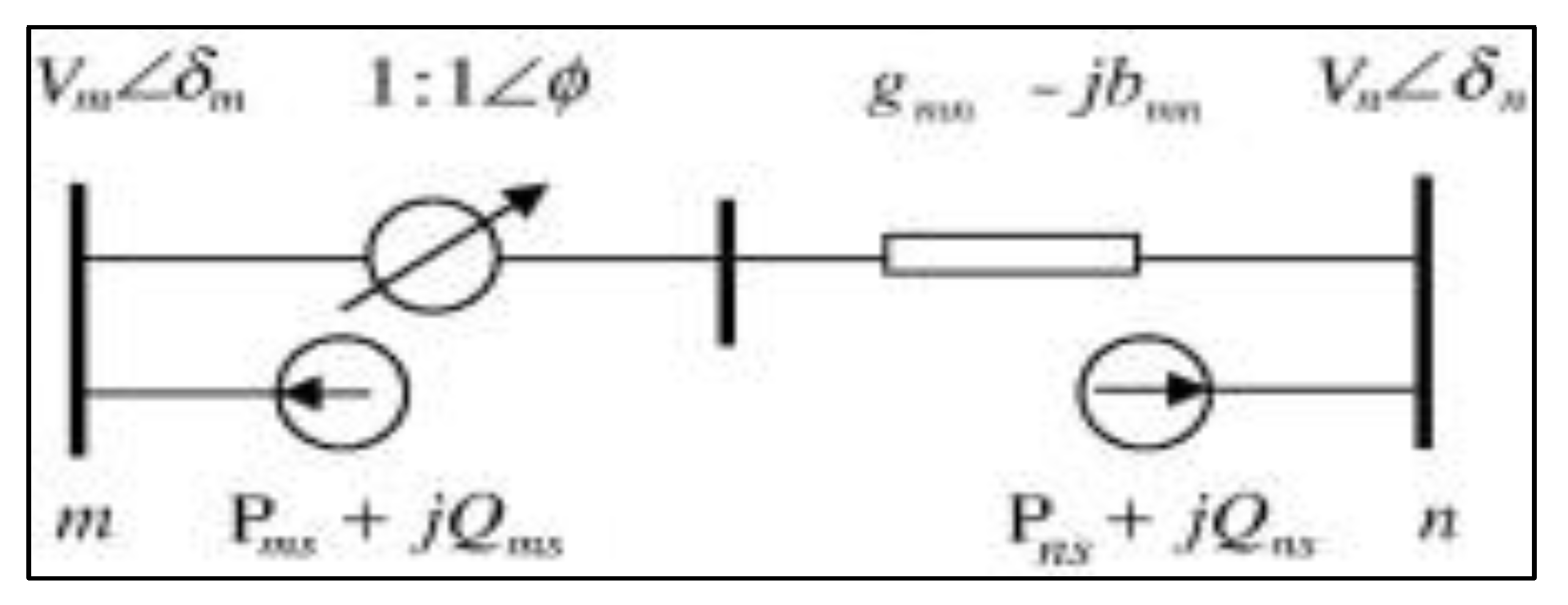
2.9. Model of Thyristor-Controlled Phase Shifter (TCPS)
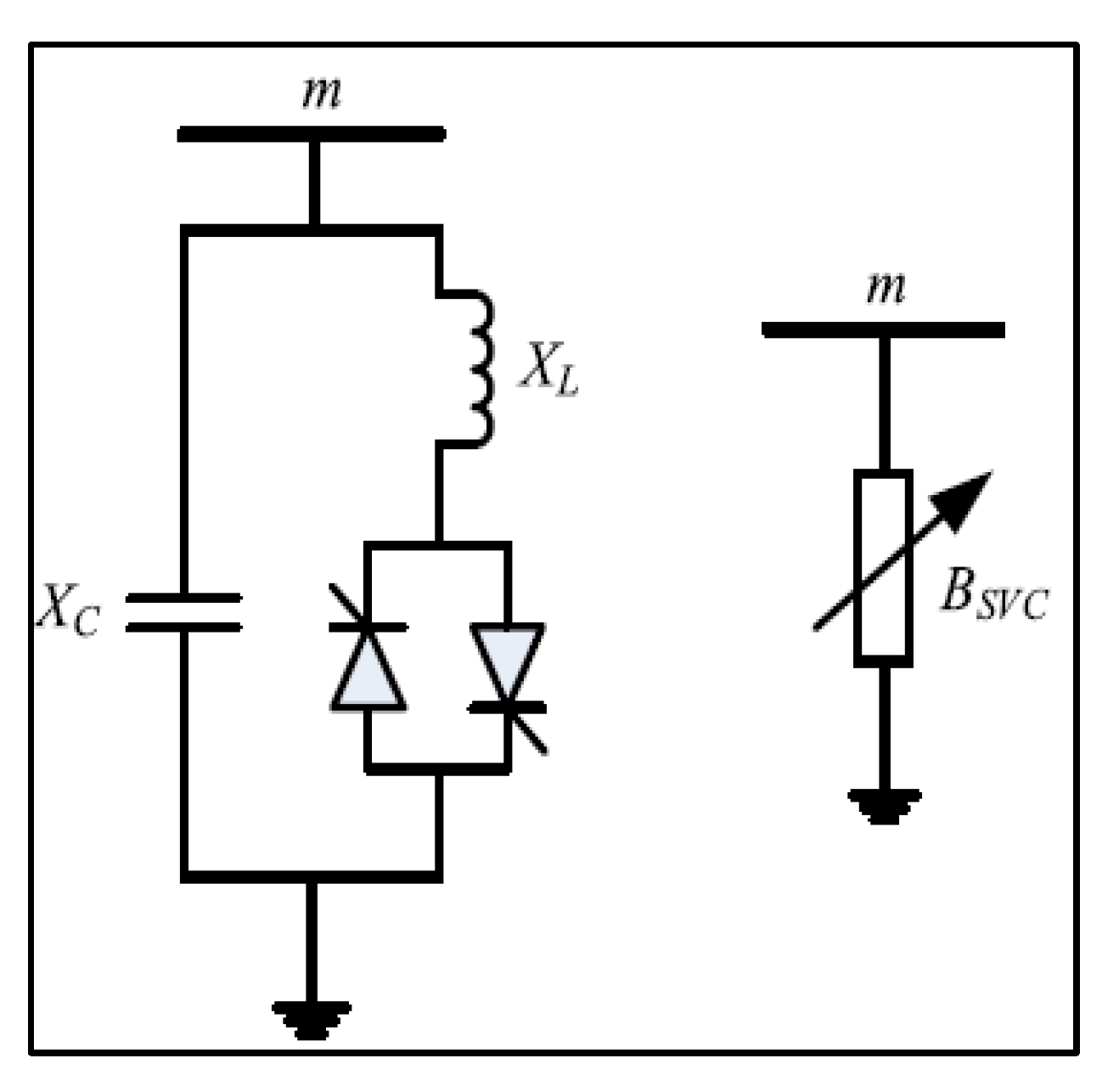
2.10. Model of Static VAR Compensator (SVC)
3. Objectives of Optimization
3.1. Reducing Overall Costs While Using Non-Conventional Energy Sources
3.2. Reduction of Voltage Variation with the Use of Non-Conventional Energy Sources
3.3. Minimization of APL Including Non-Conventional Energy Sources
3.4. Enhancement of VSI Including Non-Conventional Energy Sources
3.5. Minimization of Entire Gross Cost Including Non-Conventional Energy Resources
3.6. Equality Constraints
3.7. Inequality Constraints
- Generator bounds:
- Security bounds:
- FACTS devices bounds:
4. Generalized Normal Distribution Optimization Algorithm
4.1. Inspiration
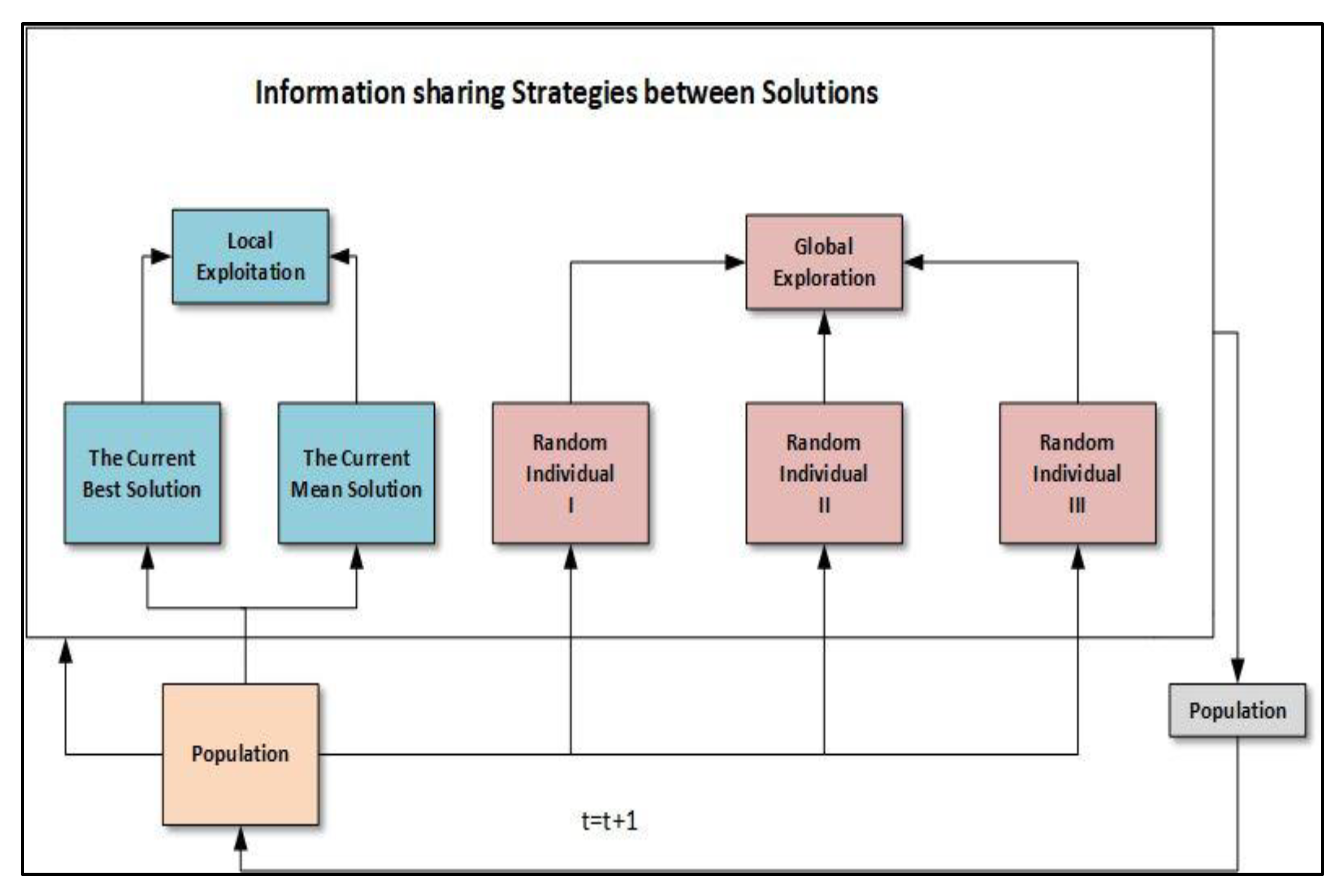
4.2. Local Exploitation
4.3. Global Exploration
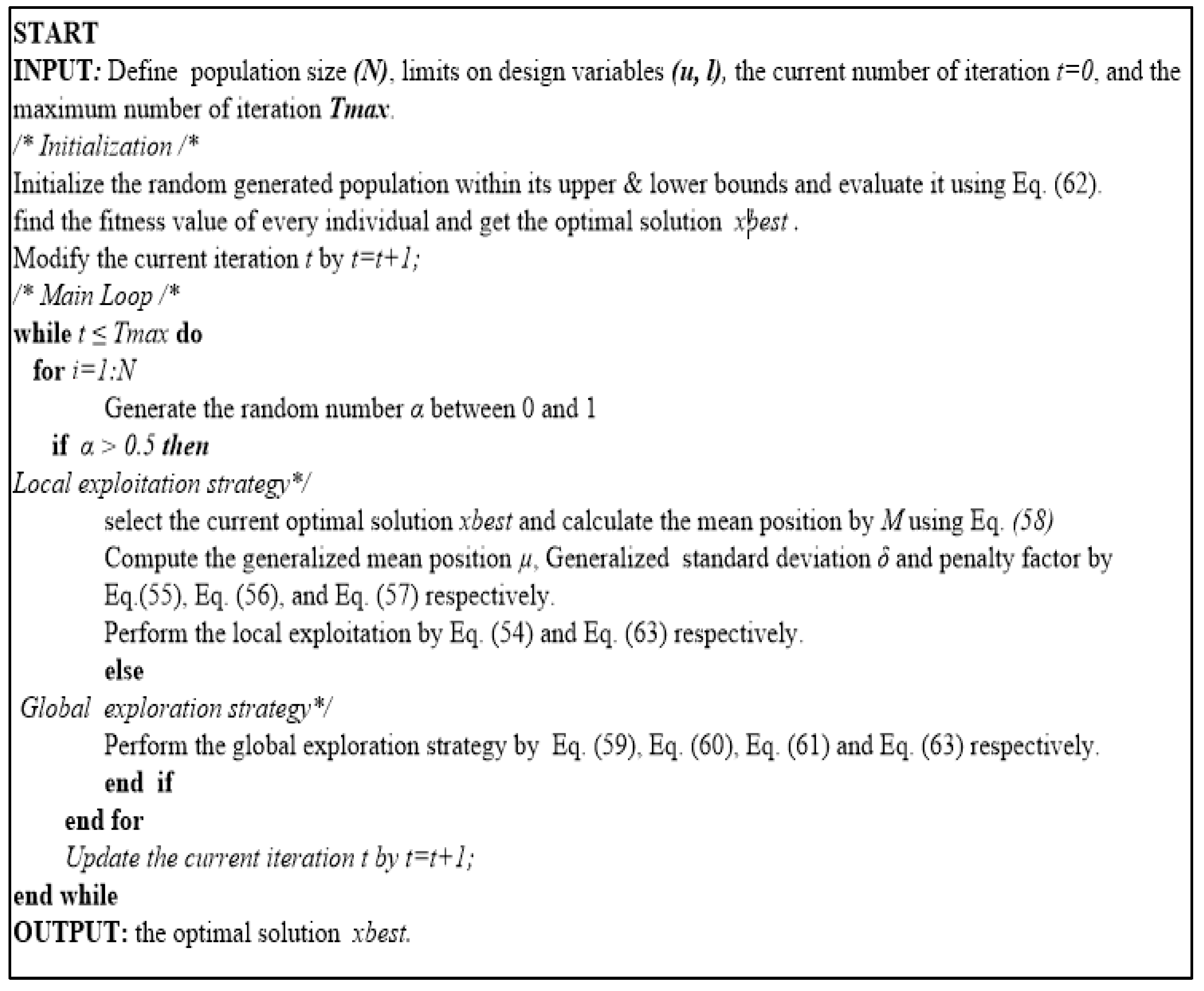
4.4. The Implementation of the Proposed Method for Optimization
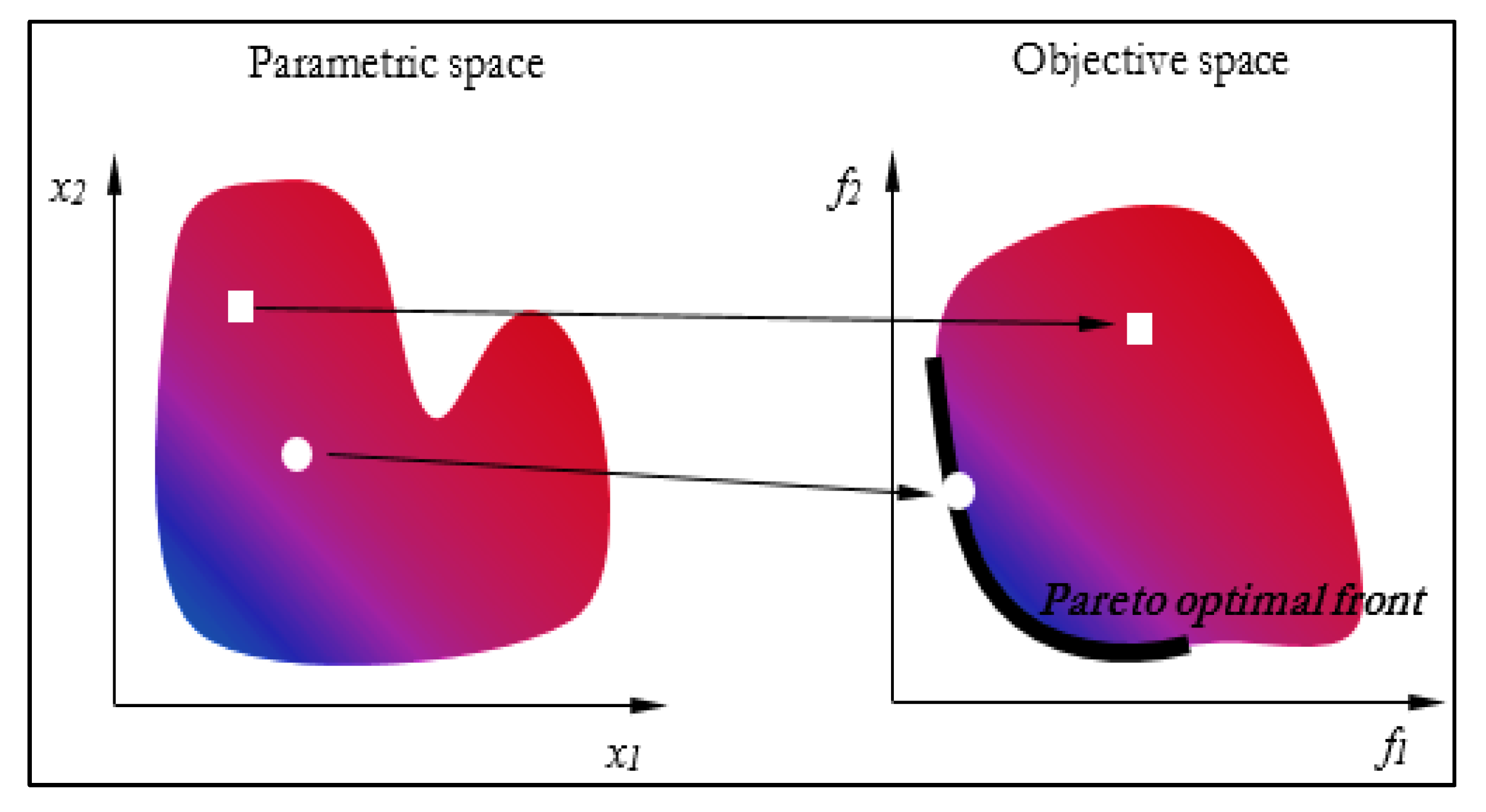
4.5. Basic Definitions of Multi-Objective Optimization
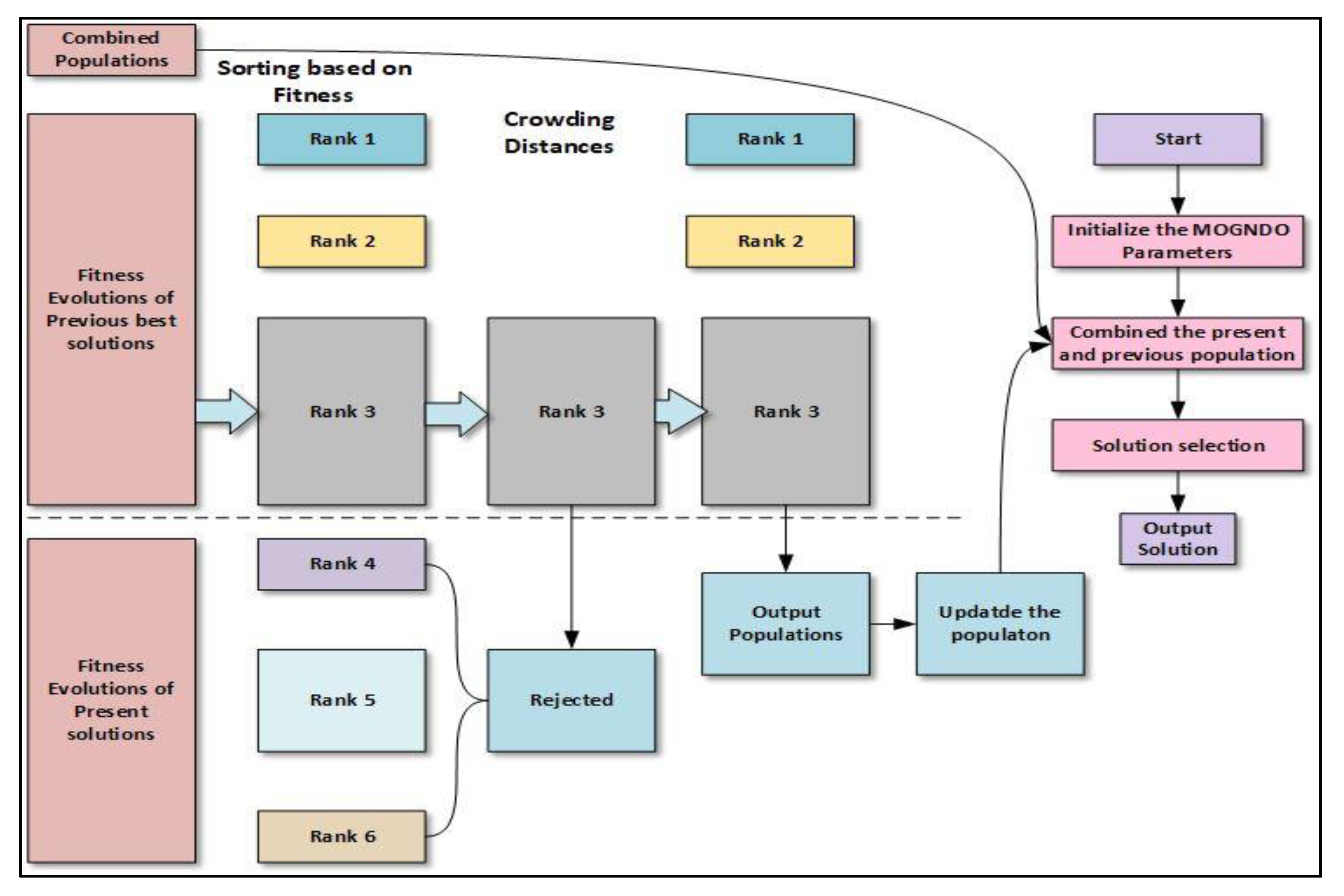
4.6. Multi-Objective Generalized Normal Distribution Optimization (MOGNDO)
- Locating the non-dominated solution is the first step.
- The second step is the use of the NDS strategy.
- Performing non-dominated ranking (NDR) calculations on all non-dominated solutions.
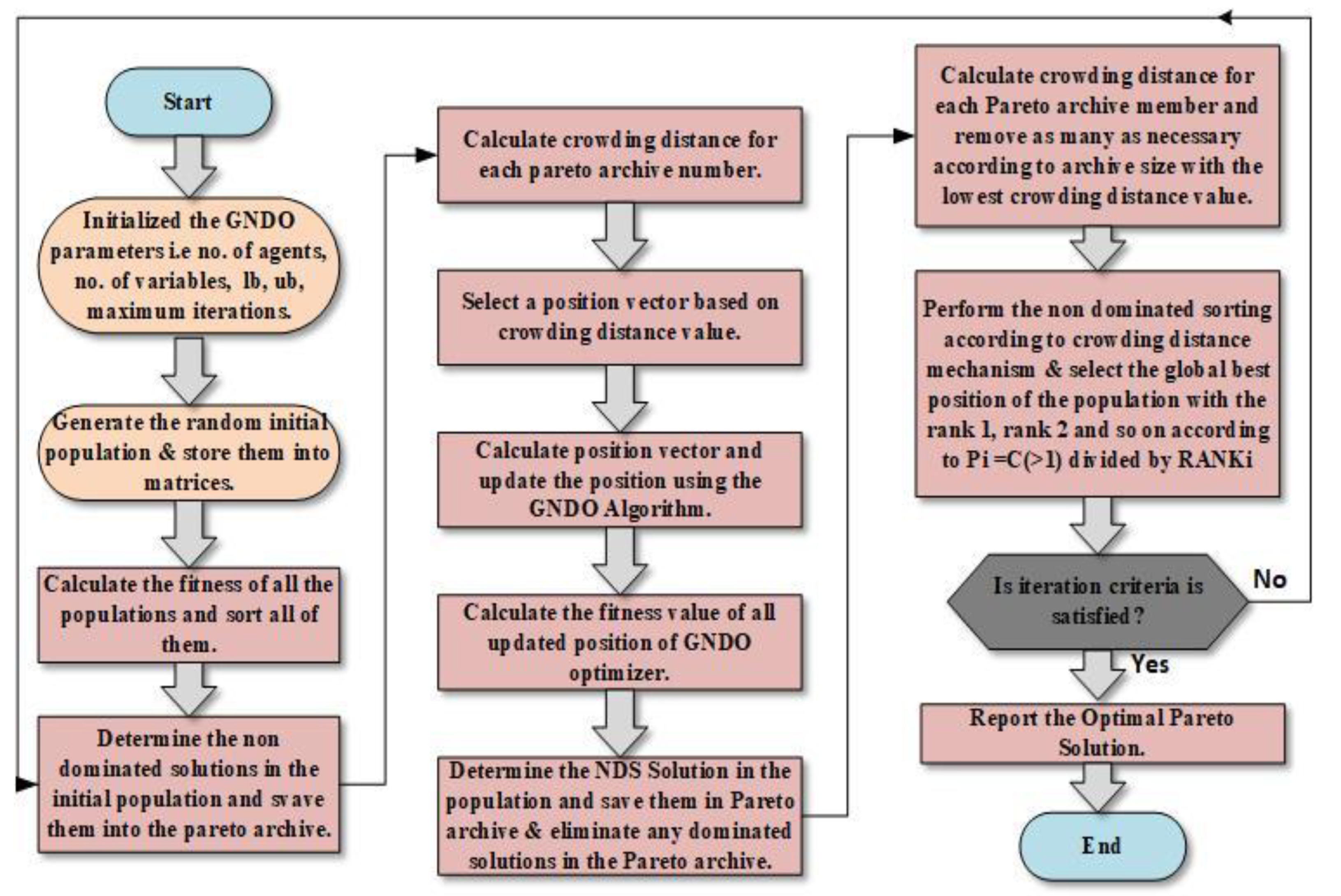
| Algorithm 1: Pseudocode of Multi-objective Generalized Normal Distribution Optimization (MOGNDO). |
| Step 1: Initially Generate population (Po) randomly in solution space (S) |
| Step 2: Evaluate objective space (F) for the generated population (Po) |
| Step 3: Sort the based on the elitist non-dominated sort method and find the non-dominated rank (NDR) and fronts |
| Step 4: Compute crowding distance (CD) for each front |
| Step 5: Update solutions (Pj) |
| Step 6: Merge Po and Pj to create Pi = Po U Pj |
| Step 7: For Pi perform Step 2 |
| Step 8: Based on NDR and CD sort Pi |
| Step 9: Replace Po with Pi for Np first members of Pi |
4.7. Constraint Handling Approach
4.8. Fuzzy Approach for the Multi-Objective Problem
5. Simulation Results, Analysis, and Comparative Study
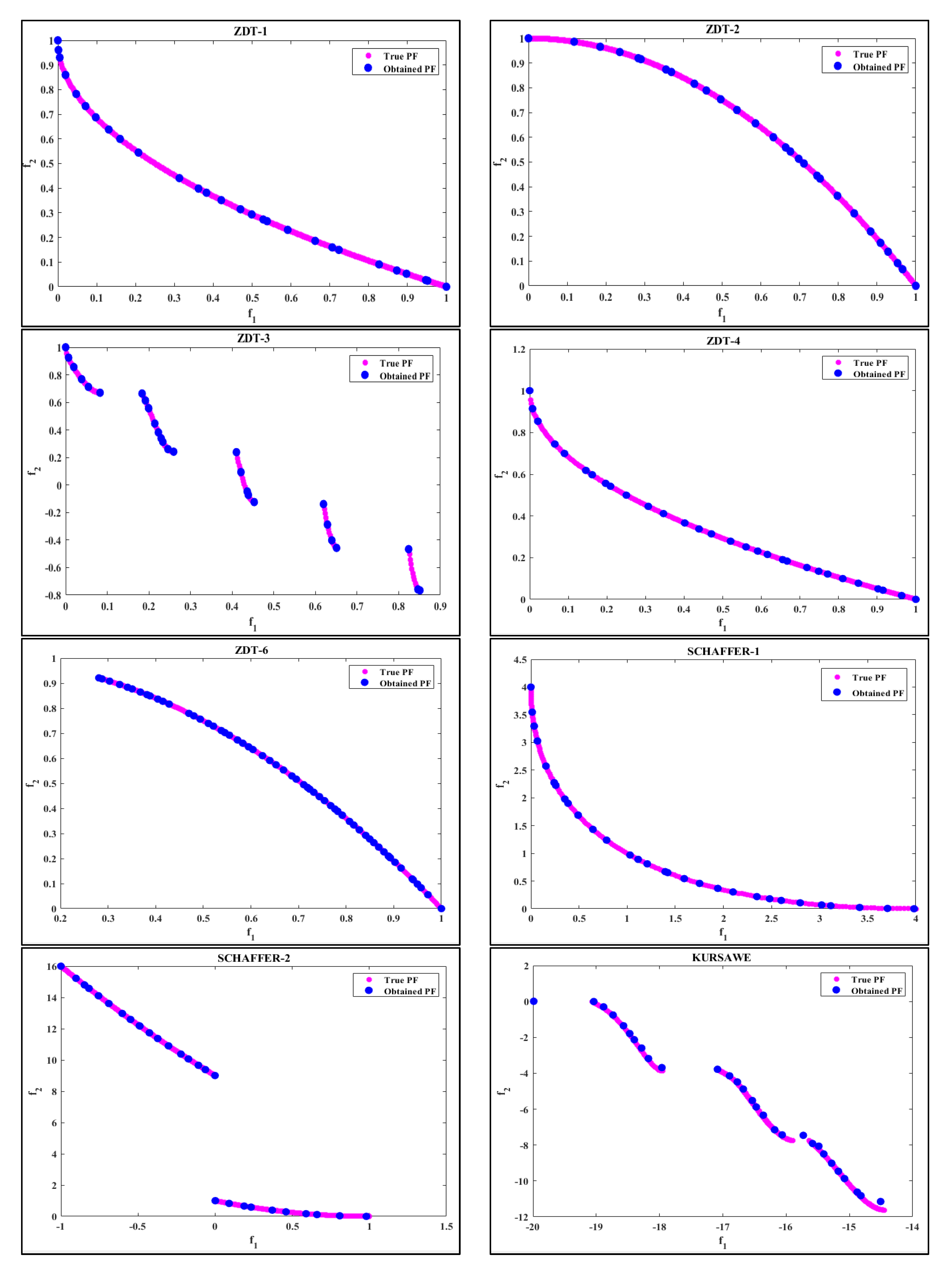
5.1. MOGNDO Results for Test Benchmark Problems
5.2. Multi-Objectives OPF Problem with Wind Power Plants and Three FACTS Devices
- Scenario-1 (Solo objective OPF with wind power plants and FACTS devices)
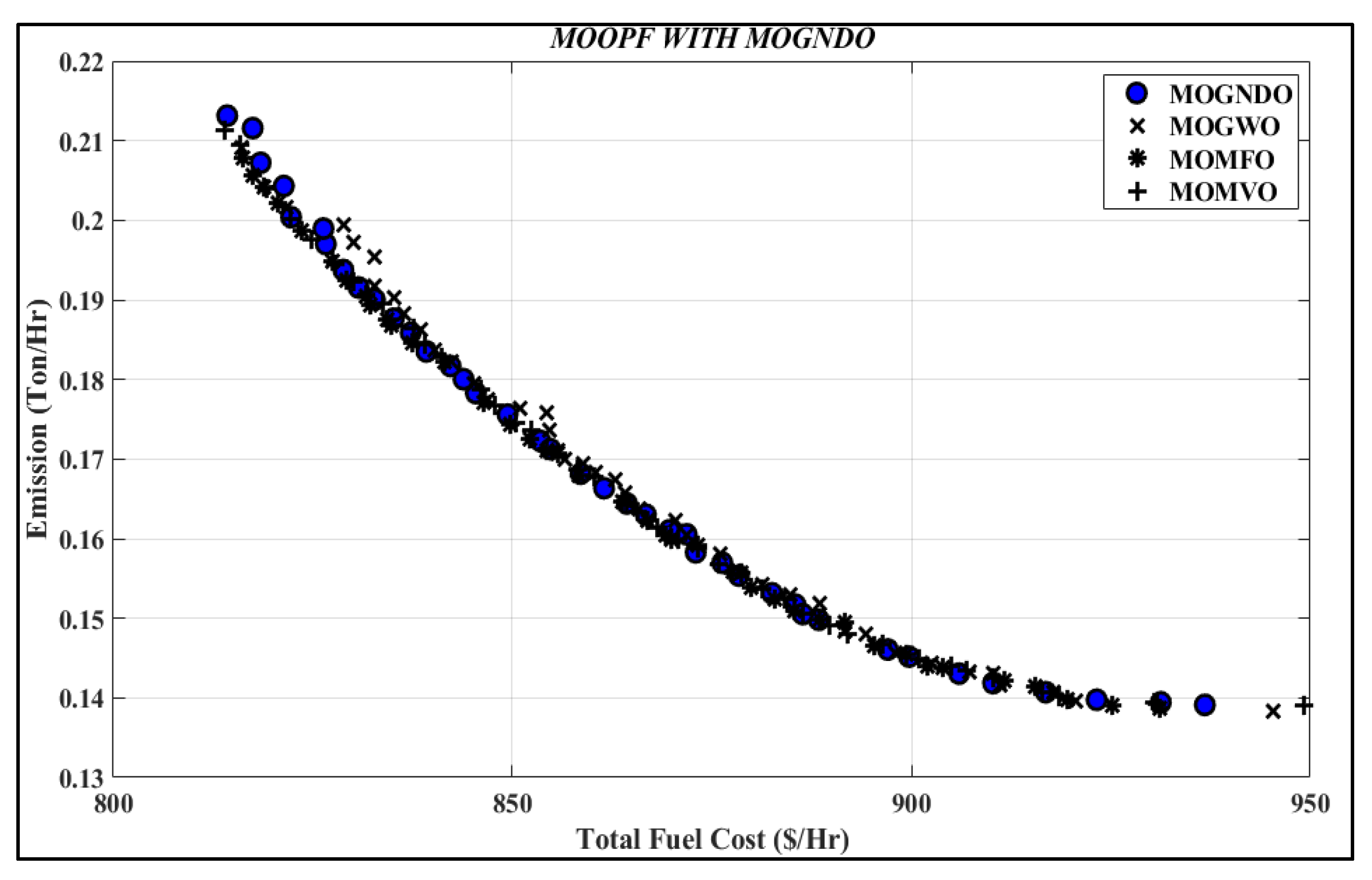
- Scenario-2 (Multi-objective OPF with wind power plants and FACTS devices)
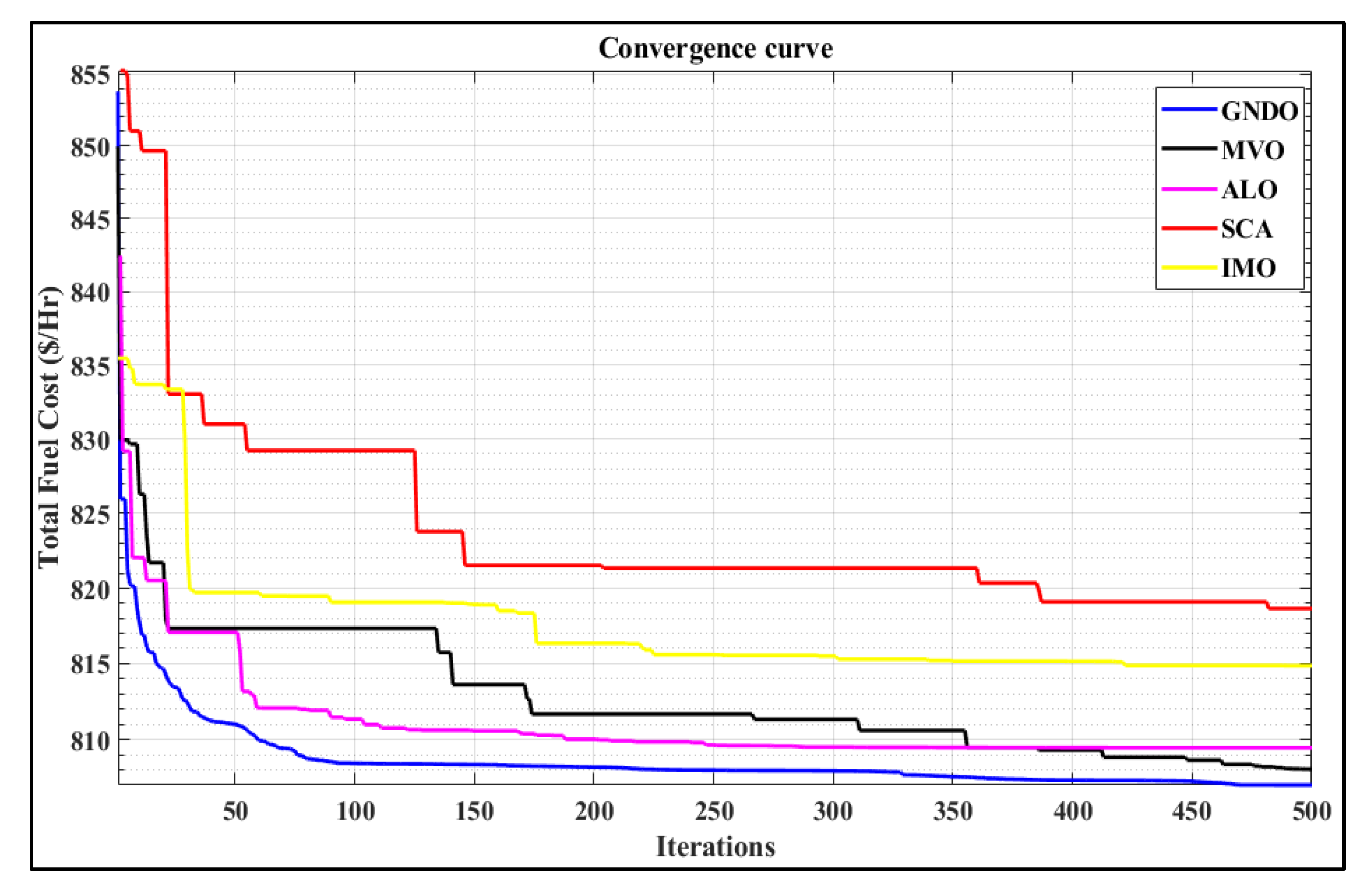
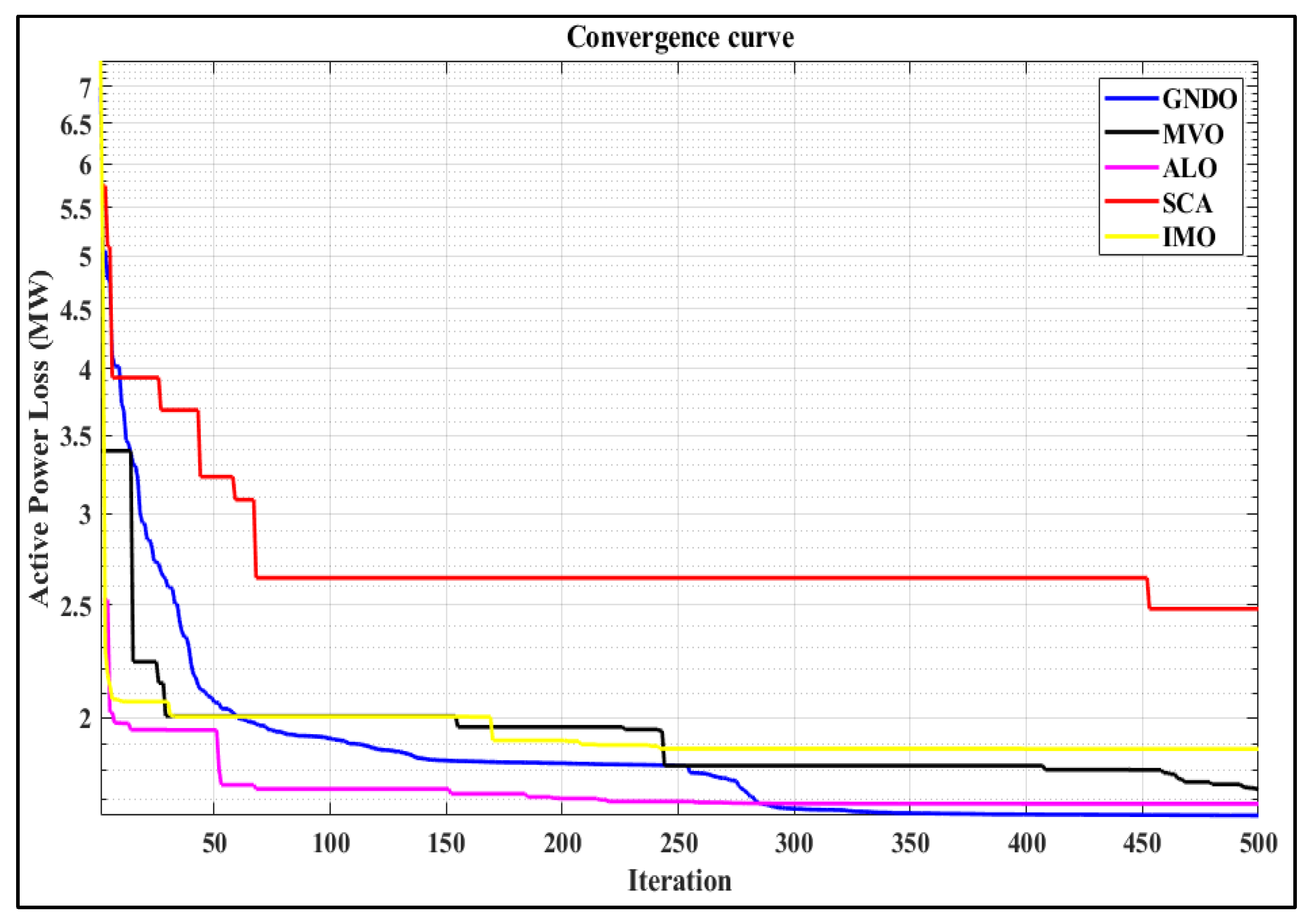
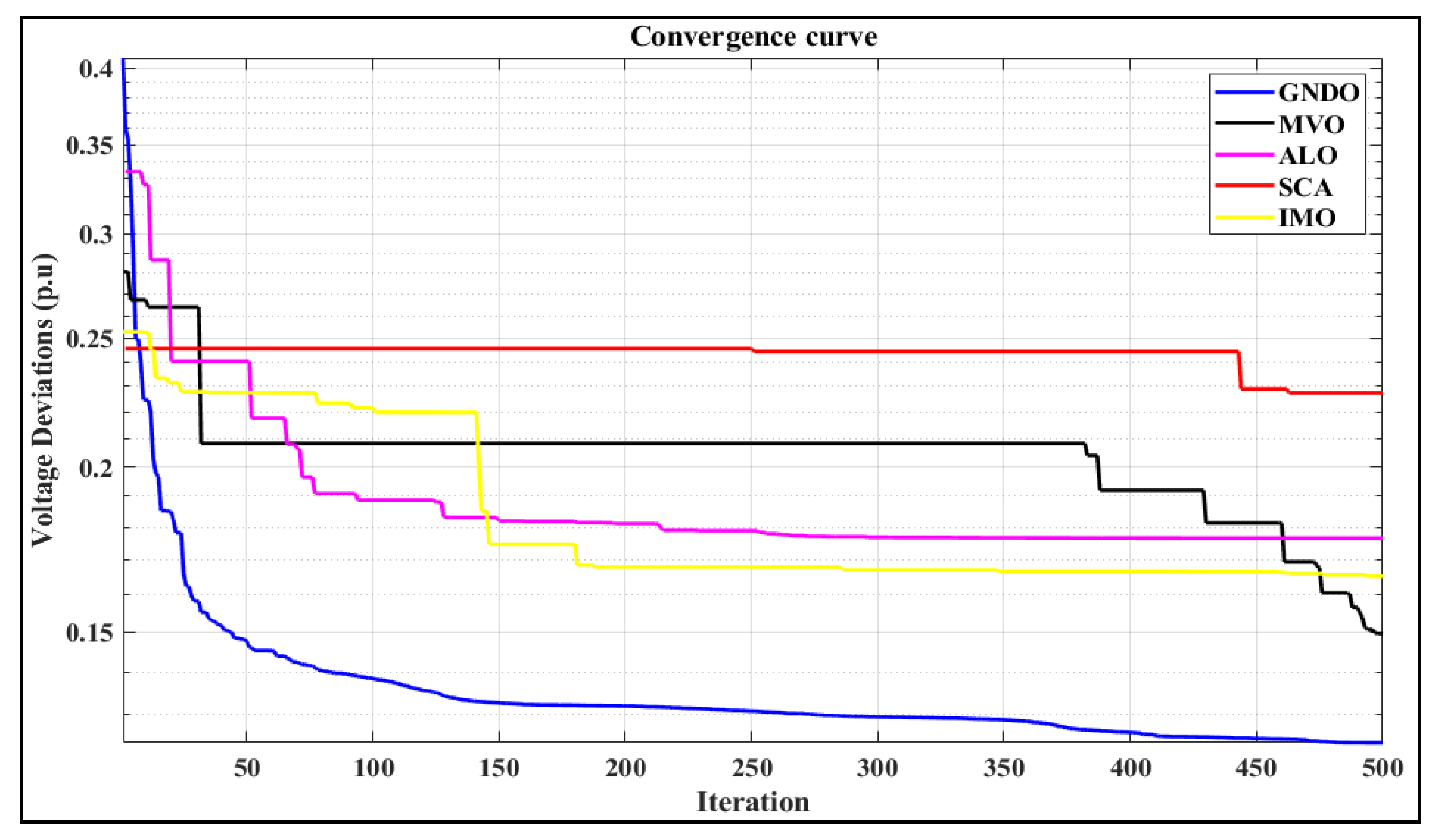
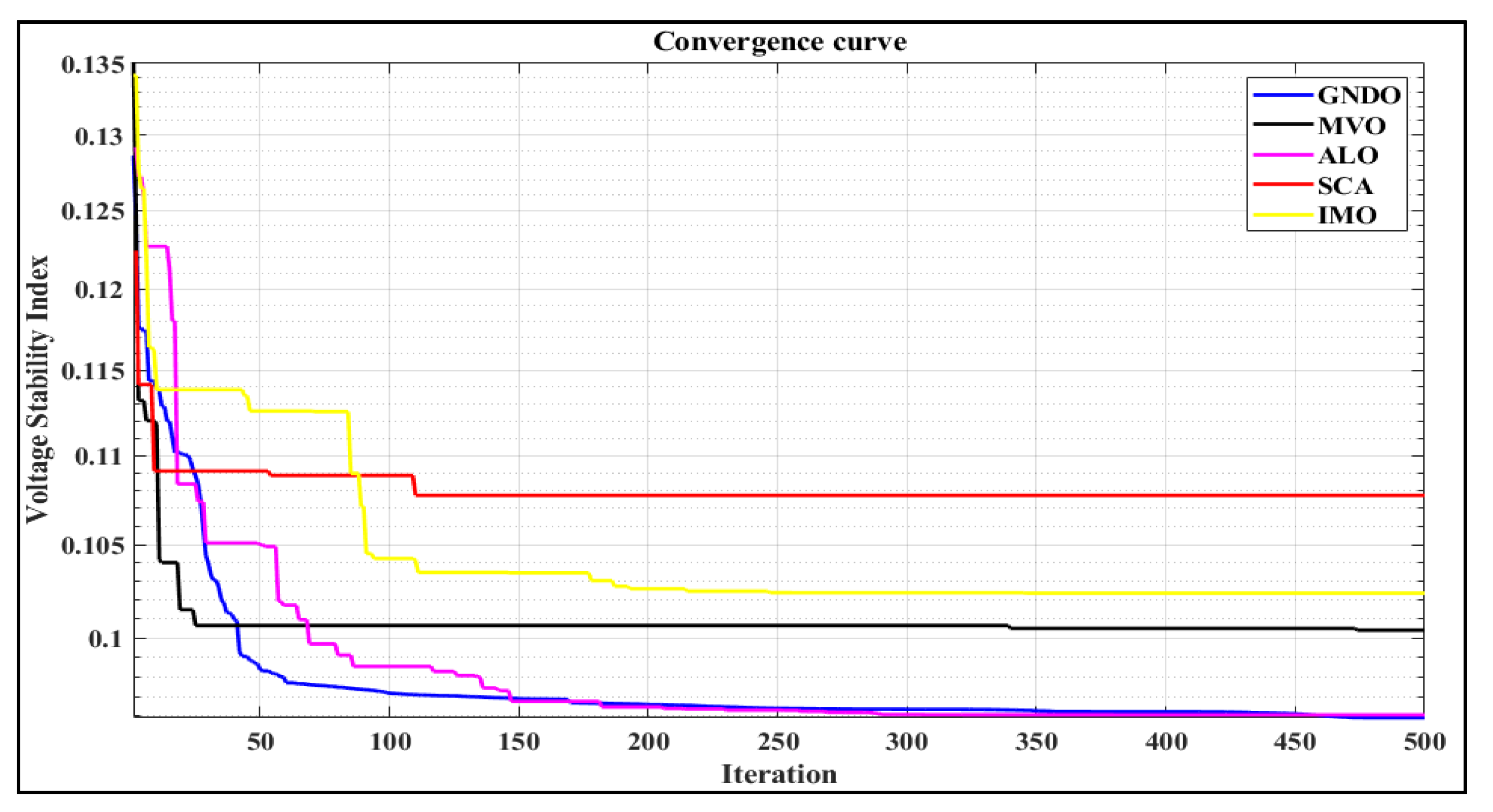
5.3. Scenario-1 (Single Objective OPF with Wind Power Plants and FACTS Devices)
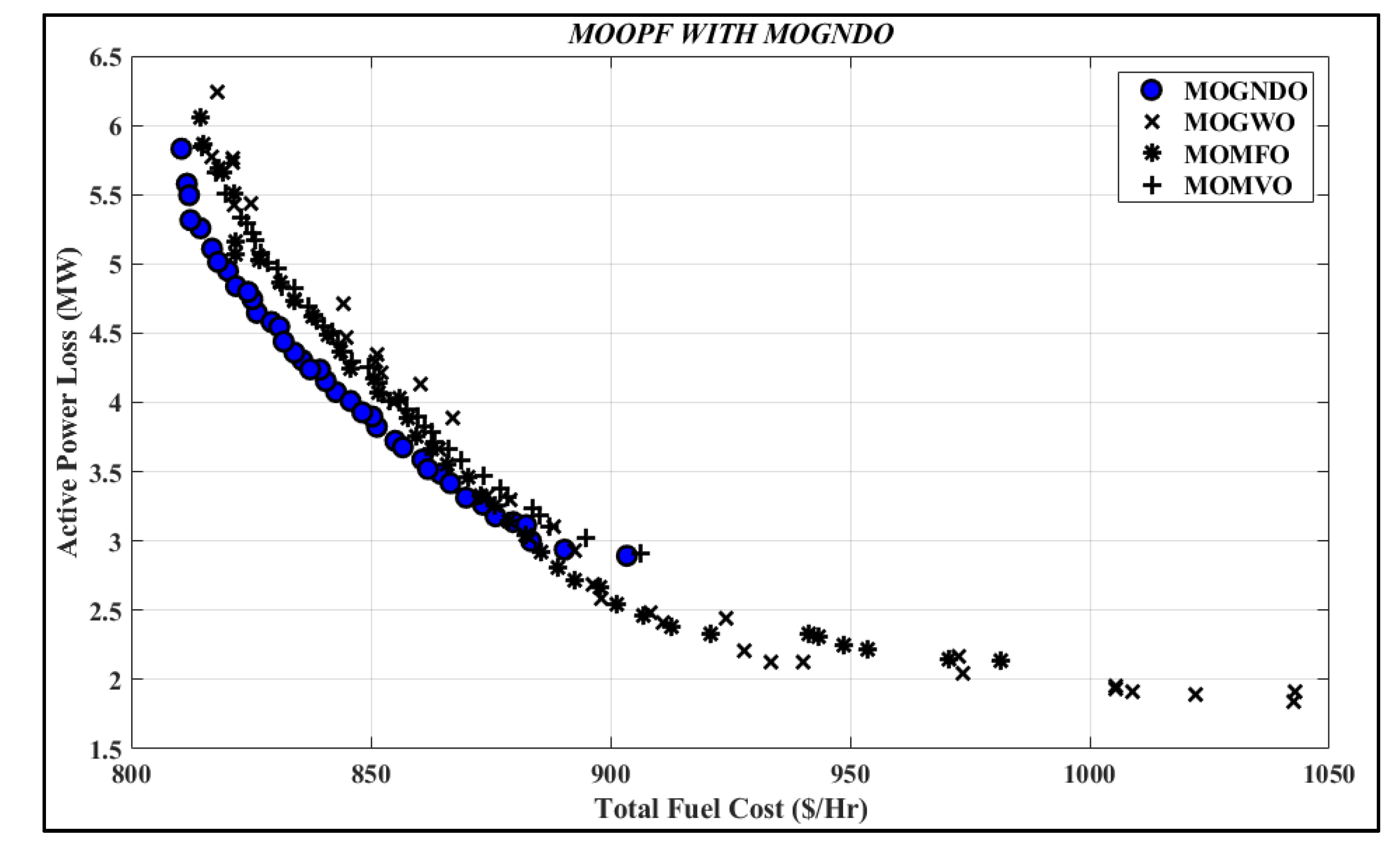
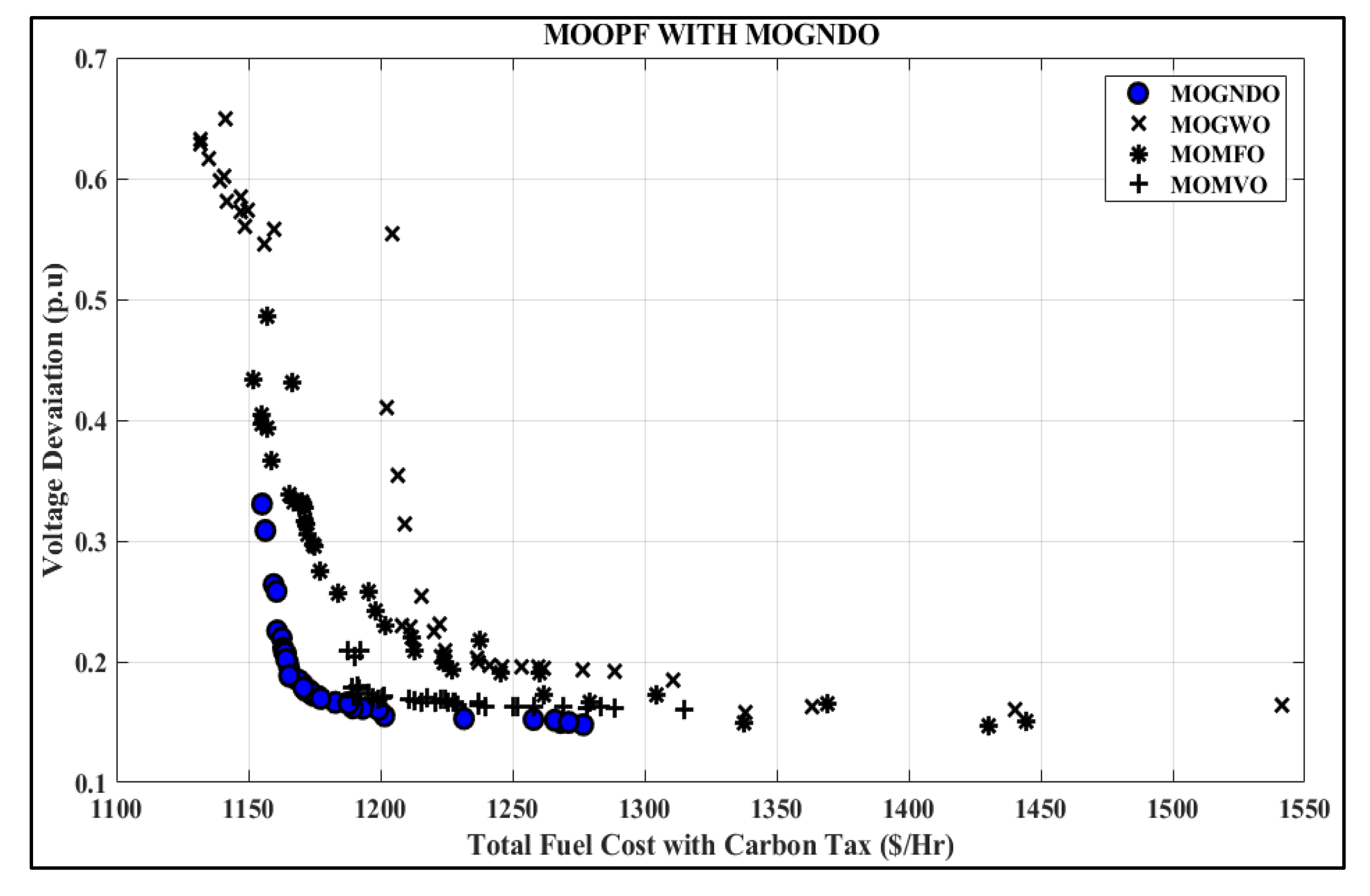
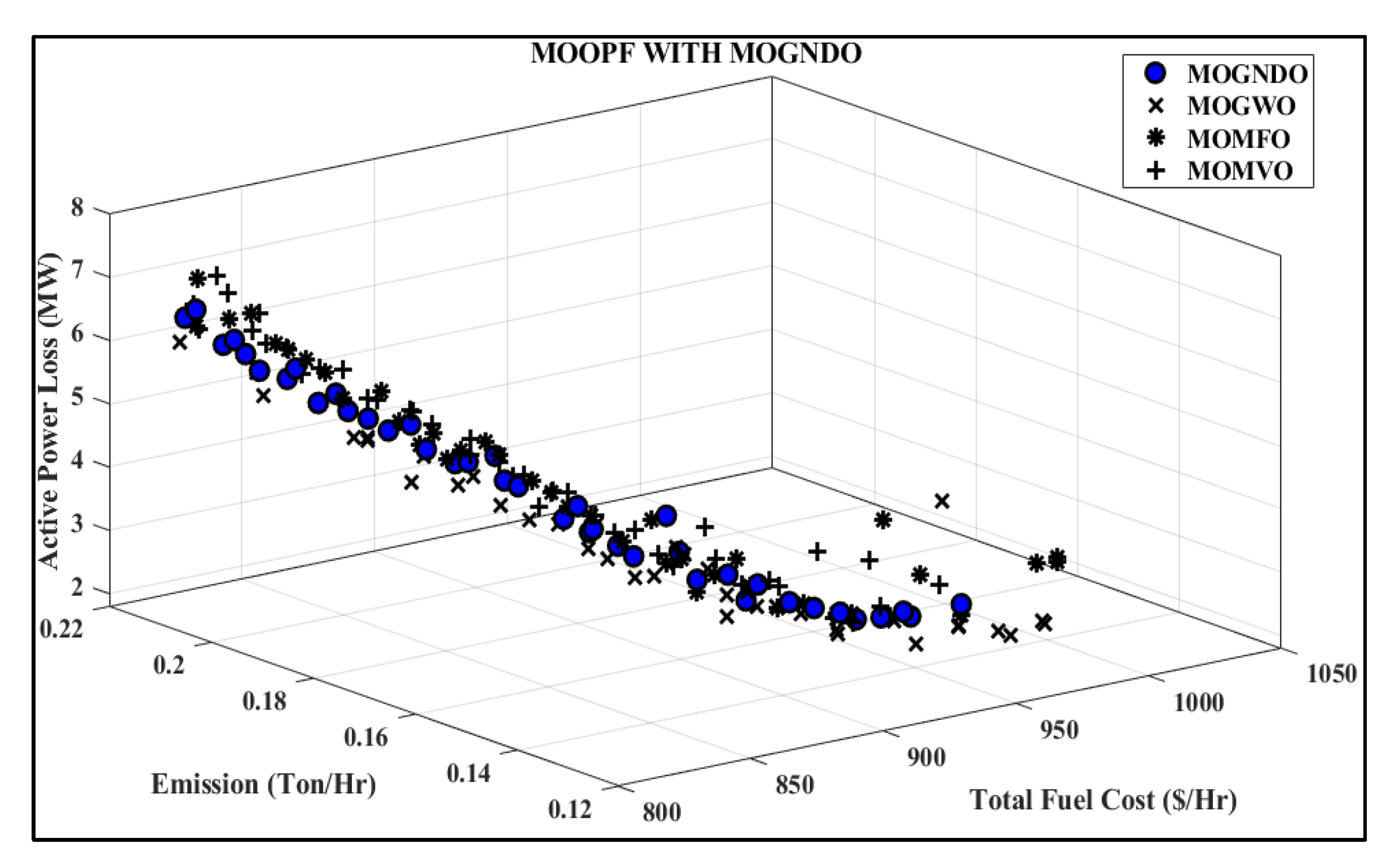
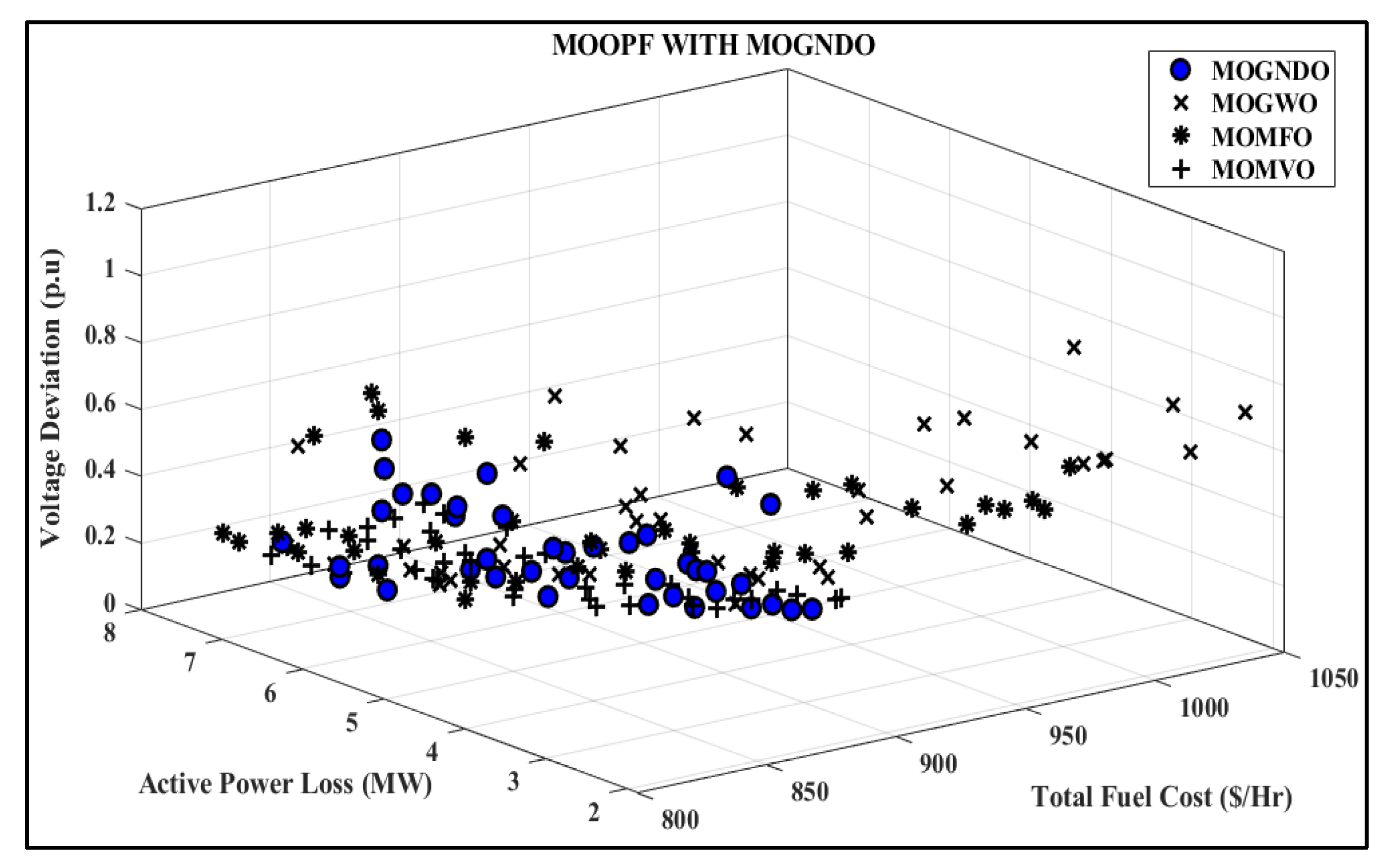
5.4. Scenario-2 (Multi-Objective OPF with Non-Conventional Sources Energy Resources)
6. Conclusions
- Randomization in MOGNDO includes the diversity of the Pareto front being enhanced, since all solutions in the first dominated front will have an equal chance of being selected, and multi-objectives are made uniformly significant while performing local exploration.
- MOGNDO can deal with large-scale search spaces and is less dependent on problem characteristics. Moreover, these algorithms are capable of estimating multiple points in the search domain simultaneously, due to their population-based nature.
- MOGNDO strikes a good balance between exploitation and exploration, providing powerful searchability for finding the optimum solution
- MOGNDO is superior in terms of the balance of diversity and convergence, the distribution of PF, and better convergence.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Acronyms | |
| OPF | Optimal Power Flow |
| Mas | Meta Heuristics Algorithms |
| MOGNDO | Multi-Objective Generalized Normal Distribution Optimization |
| TG | Thermal Generating unit |
| WG | Wind Generation |
| ISO | Independent System Operator |
| Probability Density Function | |
| BCS | Best Compromise Solution |
| MOMFO | Multi-Objective Moth Flame Optimization |
| MOOPF | Multi-Objective Optimal Power Flow |
| SHADE-SF | Success History-based Adaptive Differential Evolution using Superiority of Feasible solutions method |
| DE-SF | Differential Evolution using Superiority of Feasible solutions method |
| ABC-SF | Artificial Bee Colony using Superiority of Feasible solutions method |
| PSO-SF | Particle Swarm Optimization using Superiority of Feasible solutions method |
| FPA-SF | Flower Pollination Algorithm using Superiority of Feasible solutions method |
| MSA-SF | Moth Swarm Algorithm using Superiority of Feasible solutions method |
| TFC | Total Fuel Cost |
| APL | Active power Loss |
| VSI | Voltage Stability Index |
| Nomenclature | |
| Price constants for ith coal-based power plants. | |
| Toxic gas emanation constants concerning the ith coal-based units. | |
| Direct cost constant | |
| Scheduled power of the wind unit. | |
| Reserve cost coefficient regarding wind unit | |
| Penalty cost coefficient of wind unit | |
| Accessible power from the wind unit | |
| Specified output power from the wind unit | |
| Wind energy probability density function for the wind unit. | |
| and | Cut-in, rated, and cut-out wind velocity of the turbine respectively |
| Rated value of the generated output of the wind turbine | |
| Degree of series compensation | |
| Line inductive reactance linking buses and | |
| Resistance of the line linking buses and | |
| and | Bus voltage magnitudes linking buses and . |
| and | Phase angles of the linking buses and |
| and | Conductance and susceptance of the line linking buses and . |
| Number of load (PQ) buses | |
| pu voltage level of th bus. | |
| and | Generation and dispatch at th bus |
| Number of buses | |
| and | Sub-matrices of |
| Variance in phase angles of voltage among bus and bus | |
| and | Real and VAR power demand respectively at th bus |
| and | Real and VAR outputs respectively of th bus by either unit (coal-based or non-conventional) as applicable |
| and | Conductance and susceptance between bus and bus |
References
- Joshi, M.; Ghadai, R.K.; Madhu, S.; Kalita, K.; Gao, X.-Z. Comparison of NSGA-II, MOALO and MODA for Multi-Objective Optimization of Micro-Machining Processes. Materials 2021, 14, 5109. [Google Scholar] [CrossRef] [PubMed]
- Cao, B.; Li, M.; Liu, X.; Zhao, J.; Cao, W.; Lv, Z. Many-objective deployment optimization for a drone-assisted camera network. IEEE Trans. Netw. Sci. Eng. 2021, 8, 2756–2764. [Google Scholar] [CrossRef]
- Liang, X.; Luo, L.; Hu, S.; Li, Y. Mapping the knowledge frontiers and evolution of decision making based on agent-based modeling. Knowl.-Based Syst. 2022, 250, 108982. [Google Scholar] [CrossRef]
- Zhang, K.; Wang, Z.; Chen, G.; Zhang, L.; Yang, Y.; Yao, C.; Wang, J.; Yao, J. Training effective deep reinforcement learning agents for real-time life-cycle production optimization. J. Pet. Sci. Eng. 2022, 208, 109766. [Google Scholar] [CrossRef]
- Ganesh, N.; Ghadai, R.K.; Bhoi, A.K.; Kalita, K.; Gao, X.-Z. An intelligent predictive model-based multi-response optimization of EDM process. Comput. Model. Eng. Sci. 2020, 124, 459–476. [Google Scholar] [CrossRef]
- Ghadai, R.K.; Kalita, K.; Gao, X.-Z. Symbolic regression metamodel based multi-response optimization of EDM process. FME Trans. 2020, 48, 404–410. [Google Scholar] [CrossRef]
- Cao, B.; Zhang, W.; Wang, X.; Zhao, J.; Gu, Y.; Zhang, Y. A memetic algorithm based on two_Arch2 for multi-depot heterogeneous-vehicle capacitated arc routing problem. Swarm Evol. Comput. 2021, 63, 100864. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Z.; Liu, X.; Wang, L.; Xia, X. Ore image classification based on small deep learning model: Evaluation and optimization of model depth, model structure and data size. Miner. Eng. 2021, 172, 107020. [Google Scholar] [CrossRef]
- Ullah, Z.; Wang, S.; Radosavljevic, J.; Lai, J. A solution to the optimal power flow problem considering WT and PV generation. IEEE Access 2019, 7, 46763–46772. [Google Scholar] [CrossRef]
- Elattar, E.E. Optimal power flow of a power system incorporating stochastic wind power based on modified moth swarm algorithm. IEEE Access 2019, 7, 89581–89593. [Google Scholar] [CrossRef]
- Man-Im, A.; Ongsakul, W.; Singh, J.G.; Madhu, M.N. Multi-objective optimal power flow considering wind power cost functions using enhanced PSO with chaotic mutation and stochastic weights. Electr. Eng. 2019, 101, 699–718. [Google Scholar] [CrossRef]
- Salkuti, S.R. Optimal power flow using multi-objective glowworm swarm optimization algorithm in a wind energy integrated power system. Int. J. Green Energy 2019, 16, 1547–1561. [Google Scholar] [CrossRef]
- Kathiravan, R.; Kumudini Devi, R.P. Optimal power flow model incorporating wind, solar, and bundled solar-thermal power in the restructured Indian power system. Int. J. Green Energy 2017, 14, 934–950. [Google Scholar] [CrossRef]
- Duman, S.; Rivera, S.; Li, J.; Wu, L. Optimal power flow of power systems with controllable wind-photovoltaic energy systems via differential evolutionary particle swarm optimization. Int. Trans. Electr. Energy Syst. 2020, 30. [Google Scholar] [CrossRef]
- Duman, S.; Li, J.; Wu, L.; Guvenc, U. Optimal power flow with stochastic wind power and FACTS devices: A modified hybrid PSOGSA with chaotic maps approach. Neural Comput. Appl. 2020, 32, 8463–8492. [Google Scholar] [CrossRef]
- Biswas, P.P.; Suganthan, P.N.; Qu, B.Y.; Amaratunga, G.A.J. Multiobjective economic-environmental power dispatch with stochastic wind-solar-small hydro power. Energy 2018, 150, 1039–1057. [Google Scholar] [CrossRef]
- Chen, M.-R.; Zeng, G.-Q.; Lu, K.-D. Constrained multi-objective population extremal optimization based economic-emission dispatch incorporating renewable energy resources. Renew. Energy 2019, 143, 277–294. [Google Scholar] [CrossRef]
- Chang, Y.-C.; Lee, T.-Y.; Chen, C.-L.; Jan, R.-M. Optimal power flow of a wind-thermal generation system. Int. J. Electr. Power Energy Syst. 2014, 55, 312–320. [Google Scholar] [CrossRef]
- Saha, A.; Bhattacharya, A.; Das, P.; Chakraborty, A.K. A novel approach towards uncertainty modeling in multiobjective optimal power flow with renewable integration. Int. Trans. Electr. Energy Syst. 2019, 29. [Google Scholar] [CrossRef]
- Biswas, P.P.; Suganthan, P.N.; Amaratunga, G.A.J. Optimal power flow solutions incorporating stochastic wind and solar power. Energy Convers. Manag. 2017, 148, 1194–1207. [Google Scholar] [CrossRef]
- Ben Hmida, J.; Chambers, T.; Lee, J. Solving constrained optimal power flow with renewables using hybrid modified imperialist competitive algorithm and sequential quadratic programming. Electr. Power Syst. Res. 2019, 177, 105989. [Google Scholar] [CrossRef]
- Pandya, S.; Jariwala, H.R. Single- and multiobjective optimal power flow with stochastic wind and solar power plants using moth flame optimization algorithm. Smart Sci. 2022, 10, 77–117. [Google Scholar] [CrossRef]
- Biswas, P.P.; Arora, P.; Mallipeddi, R.; Suganthan, P.N.; Panigrahi, B.K. Optimal placement and sizing of FACTS devices for optimal power flow in a wind power integrated electrical network. Neural Comput. Appl. 2021, 33, 6753–6774. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Jin, Z.; Mirjalili, S. Generalized normal distribution optimization and its applications in parameter extraction of photovoltaic models. Energy Convers. Manag. 2020, 224, 113301. [Google Scholar] [CrossRef]
- Kumar, S.; Jangir, P.; Tejani, G.G.; Premkumar, M.; Alhelou, H.H. MOPGO: A new physics-based multi-objective plasma generation optimizer for solving structural optimization problems. IEEE Access 2021, 9, 84982–85016. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for solving optimization problems. Knowl. Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Javidy, B.; Hatamlou, A.; Mirjalili, S. Ions motion algorithm for solving optimization problems. Appl. Soft Comput. 2015, 32, 72–79. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particulars | Quantity | Details |
|---|---|---|
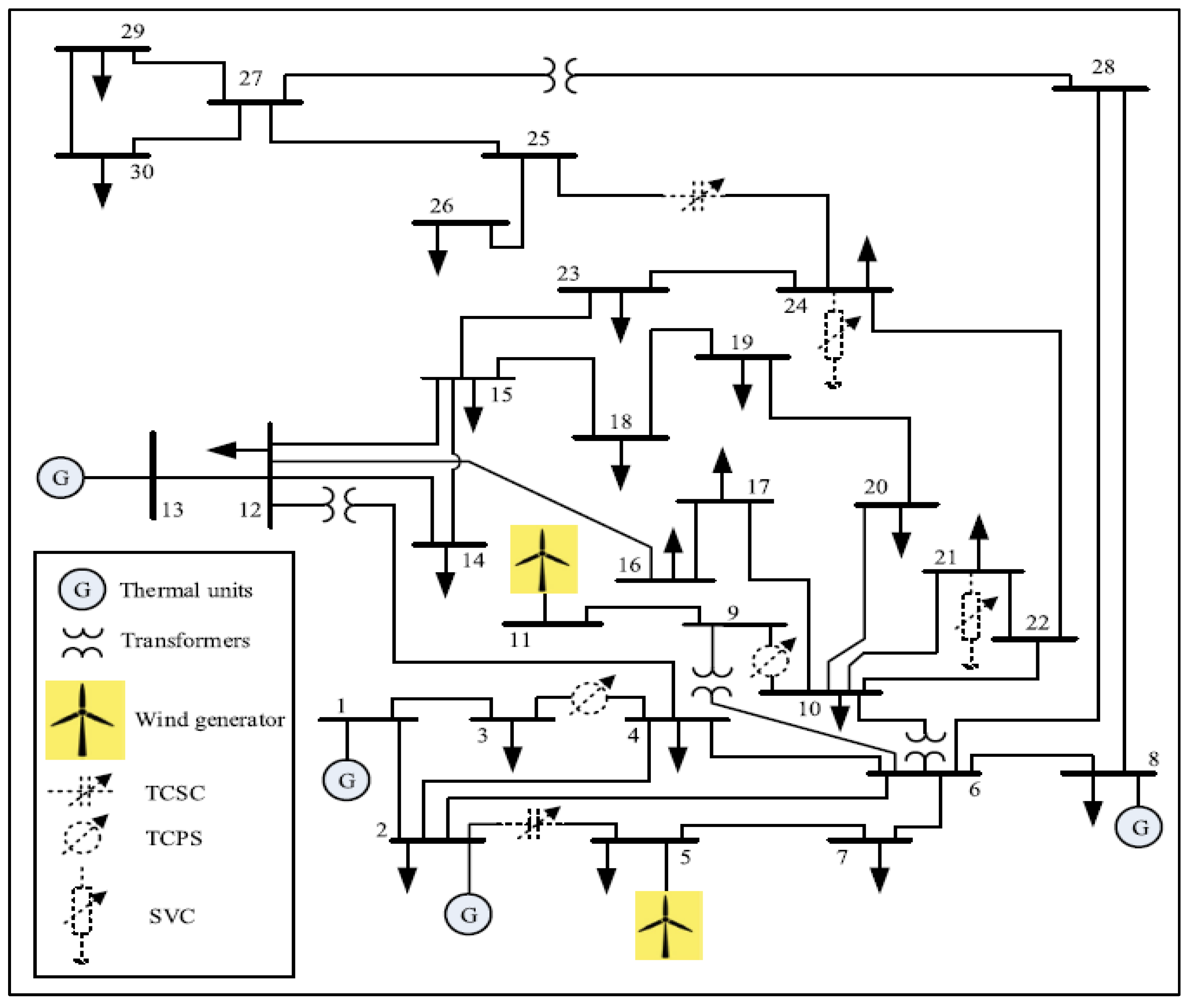
| Total buses | 30 | [23] |
| Total branches | 41 | [23] |
| Coal-based generators (TG1; TG2; TG3; TG4) | 4 | Buses: 1 (swing), 2, 8 and 13 |
| Wind generators (WG1; WG2) | 2 | Bus-5 and Bus-11 |
| Tap changing transformers | 4 | Branches: 11, 12, 15 and 36 |
| SVC | 2 | Optimal bus and rating derived |
| TCSC | 2 | Optimal branch position and rating derived |
| TCPS | 2 | Optimal placement and rating derived |
| Demand | - | 283.4 MW, 126.2 MVAr |
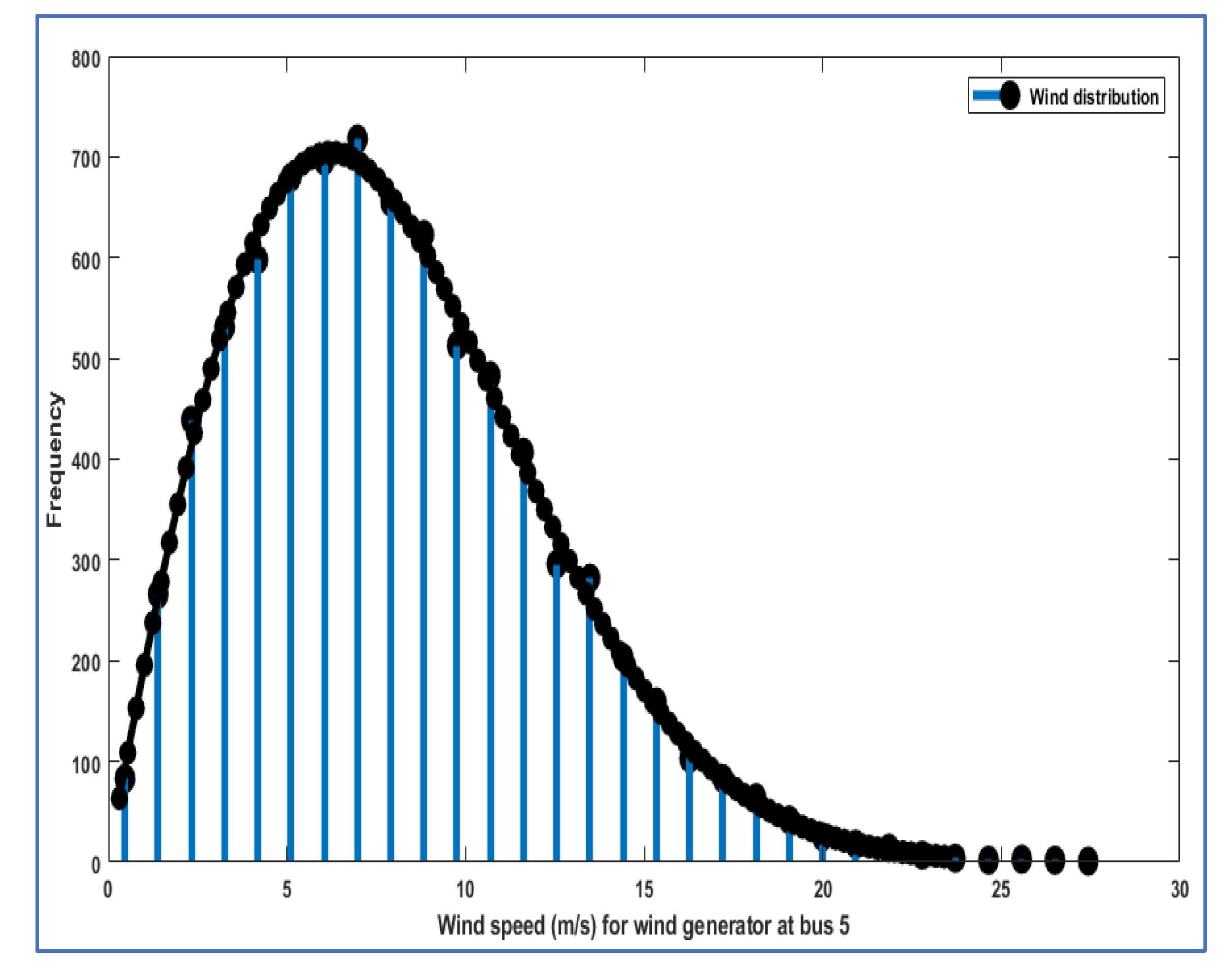
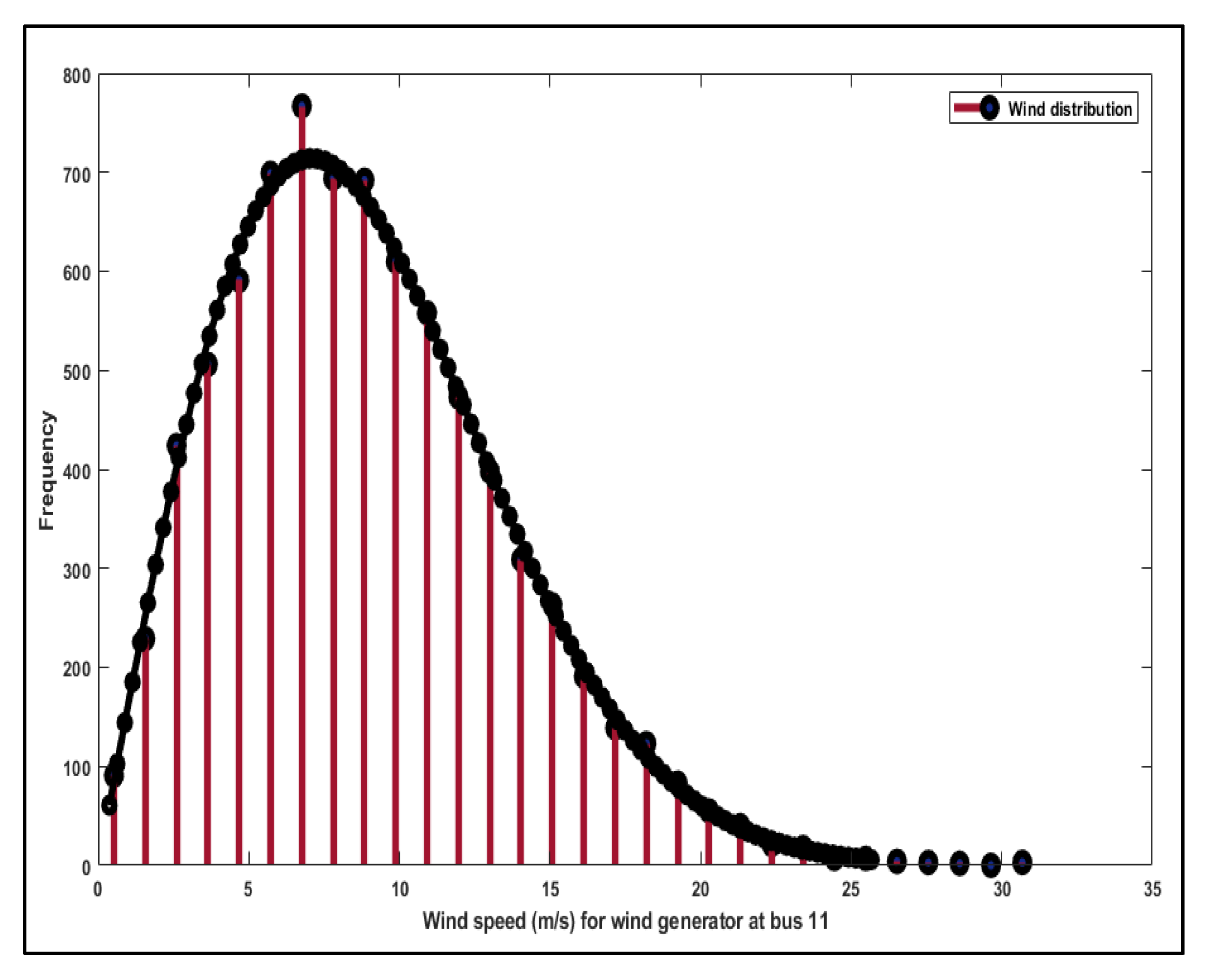
| Windfarm | No. of Turbines | Rated Power | Weibull PDF Parameters | Cost Constants | ||
|---|---|---|---|---|---|---|
| Direct | Reserve | Penalty | ||||
| WG5 (bus 5) | 25 | 75 | = 9, = 2 | 1.60 | 3.0 | 1.50 |
| WG11 (bus 11) | 20 | 60 | c = 10, = 2 | 1.75 | 3.0 | 1.50 |
| TEST FUNCTIONS | Minimum | Average | Median | Maximum | Std Dev |
|---|---|---|---|---|---|
| ZDT-1 | 0.00014795 | 0.00025051 | 0.00025043 | 0.00033133 | 6.658 × 10−5 |
| ZDT-2 | 0.00015293 | 0.00016665 | 0.00016915 | 0.00018271 | 8.9928 × 10−6 |
| ZDT-3 | 0.00048314 | 0.00059601 | 0.00057943 | 0.00077354 | 9.9396 × 10−5 |
| ZDT-4 | 0.00012104 | 0.00022808 | 0.00020834 | 0.0004758 | 9.4401 × 10−5 |
| ZDT-6 | 9.084 × 10−5 | 0.046963 | 0.00011316 | 0.22777 | 0.084189 |
| KURSAVE | 0.00079741 | 0.0014452 | 0.0012905 | 0.0025211 | 0.00051722 |
| SCHAFFER-1 | 0.00033607 | 0.00040992 | 0.00042203 | 0.00047897 | 4.714 × 10−5 |
| SCHAFFER-2 | 4.3236 × 10−5 | 7.2824 × 10−5 | 5.2463 × 10−5 | 0.00016939 | 4.0743 × 10−5 |
| TEST FUNCTIONS | Minimum | Average | Median | Maximum | Std Dev |
|---|---|---|---|---|---|
| ZDT-1 | 0.00086623 | 0.00098862 | 0.0010348 | 0.0010718 | 8.6005 × 10−5 |
| ZDT-2 | 0.00086578 | 0.00098848 | 0.00094837 | 0.0012358 | 0.00012678 |
| ZDT-3 | 0.001211 | 0.0020746 | 0.0013386 | 0.0077205 | 0.0020015 |
| ZDT-4 | 0.00078066 | 0.00089518 | 0.00087008 | 0.0012276 | 0.00012621 |
| ZDT-6 | 0.0004207 | 0.00045525 | 0.00044688 | 0.00049748 | 2.8268 × 10−5 |
| KURSAVE | 0.00054436 | 0.00062399 | 0.00057845 | 0.00085408 | 9.8135 × 10−5 |
| SCHAFFER-1 | 0.0013154 | 0.0015246 | 0.0015027 | 0.0017064 | 0.0001302 |
| SCHAFFER-2 | 0.00038808 | 0.00042594 | 0.00042586 | 0.00044933 | 1.8173 × 10−5 |
| TEST FUNCTIONS | Minimum | Average | Median | Maximum | Std Dev |
|---|---|---|---|---|---|
| ZDT-1 | 0.055513 | 0.068922 | 0.068773 | 0.078086 | 0.0087192 |
| ZDT-2 | 0.055269 | 0.066982 | 0.06225 | 0.082706 | 0.010406 |
| ZDT-3 | 0.23708 | 0.30199 | 0.30489 | 0.37195 | 0.038816 |
| ZDT-4 | 0.055461 | 0.079673 | 0.082798 | 0.0984 | 0.012829 |
| ZDT-6 | 0.060275 | 0.36467 | 0.082672 | 1.2984 | 0.50689 |
| KURSAVE | 1.7123 | 2.0817 | 2.0541 | 2.3807 | 0.20644 |
| SCHAFFER-1 | 0.47734 | 0.6444 | 0.65722 | 0.78476 | 0.086121 |
| SCHAFFER-2 | 4.3184 | 6.228 | 6.1458 | 8.1797 | 0.99173 |
| TEST FUNCTIONS | Minimum | Average | Median | Maximum | Std Dev |
|---|---|---|---|---|---|
| ZDT-1 | 0.39774 | 0.4726 | 0.46959 | 0.53772 | 0.060856 |
| ZDT-2 | 0.34666 | 0.4369 | 0.44215 | 0.57139 | 0.069382 |
| ZDT-3 | 0.42402 | 0.52122 | 0.50625 | 0.64813 | 0.07401 |
| ZDT-4 | 0.3035 | 0.37573 | 0.36822 | 0.43095 | 0.043003 |
| ZDT-6 | 0.36148 | 0.6907 | 0.45236 | 1.3455 | 0.42847 |
| KURSAVE | 0.28774 | 0.3839 | 0.39009 | 0.45763 | 0.050257 |
| SCHAFFER-1 | 0.28774 | 0.3839 | 0.39009 | 0.45763 | 0.050257 |
| SCHAFFER-2 | 0.9161 | 0.95607 | 0.95992 | 1.0033 | 0.030768 |
| TEST FUNCTIONS | Minimum | Average | Median | Maximum | Std Dev |
|---|---|---|---|---|---|
| ZDT-1 | 0.38649 | 0.45794 | 0.45049 | 0.5251 | 0.059019 |
| ZDT-2 | 0.33511 | 0.42459 | 0.42842 | 0.56709 | 0.070091 |
| ZDT-3 | 0.5604 | 0.64503 | 0.64749 | 0.73814 | 0.066426 |
| ZDT-4 | 0.30364 | 0.36741 | 0.36204 | 0.4213 | 0.040601 |
| ZDT-6 | 0.35291 | 0.67963 | 0.4479 | 1.3293 | 0.42341 |
| KURSAVE | 0.37729 | 0.43491 | 0.43448 | 0.4872 | 0.030263 |
| SCHAFFER-1 | 0.27113 | 0.37375 | 0.37832 | 0.44441 | 0.051198 |
| SCHAFFER-2 | 0.56431 | 0.61293 | 0.61561 | 0.65022 | 0.02504 |
| Test System | Case # | Single and Multi-Objectives Functions |
|---|---|---|
| Adapted IEEE 30-bus test system | Case # 1 | TFC includes FACTS devices, wind farms, and coal-based plants |
| Case # 2 | Reduction of total toxic gas emanations with the use of coal-based, wind, and FACTS technologies. | |
| Case # 3 | Minimization of APL in FACTS devices, wind farms, and coal-based plants. | |
| Case # 4 | Minimization of the total voltage variation using coal-based, wind, and FACTS devices. | |
| Case # 5 | Voltage stability improvement in coal-based, wind, and FACTS equipment. | |
| Case # 6 | Total Gross Generation Cost, includes FACTS devices, wind farms, and coal-based plants. | |
| Case # 7 | Minimizing TFCs and toxic gas emanations while using non-conventional sources of energy and FACTS devices | |
| Case # 8 | TFC and APL Minimization Including non-conventional sources and FACTS Devices | |
| Case # 9 | TFC and VSI minimization including non-conventional sources and FACTS devices | |
| Case # 10 | Total Gross Generation Cost and voltage deviation minimization with non-conventional sources and FACTS devices | |
| Case # 11 | TFC, Toxic gas emanation, and APL minimization together with non-conventional sources and FACTS devices | |
| Case # 12 | TFC, APL, and VSI minimization including non-conventional sources and FACTS devices | |
| Case # 13 | TFC, Toxic gas emanation, APL, and voltage deviation minimization including non-conventional sources and FACTS devices |
| Control & State Variables | Min | Max | Case-1 | Case-2 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GNDO | MVO | ALO | SCA | IMO | GNDO | MVO | ALO | SCA | IMO | |||
| PTG2 | 20 | 80 | 41.427 | 40.311 | 40.960 | 35.458 | 30.881 | 46.634 | 46.639 | 46.634 | 48.357 | 46.726 |
| PWG5 | 0 | 75 | 49.815 | 49.459 | 49.077 | 41.719 | 54.226 | 74.818 | 74.934 | 71.362 | 75.000 | 74.507 |
| PTG8 | 10 | 35 | 10.000 | 10.352 | 13.038 | 15.172 | 14.361 | 35.000 | 35.000 | 35.000 | 35.000 | 35.000 |
| PWG11 | 0 | 60 | 40.799 | 42.135 | 39.362 | 47.561 | 36.329 | 52.365 | 51.215 | 54.905 | 60.000 | 48.761 |
| PTG13 | 12 | 40 | 12.002 | 12.000 | 12.000 | 14.321 | 16.648 | 40.000 | 40.000 | 40.000 | 40.000 | 40.000 |
| V1 | 0.95 | 1.1 | 1.091 | 1.100 | 1.100 | 1.019 | 1.100 | 1.090 | 0.997 | 1.100 | 0.997 | 1.100 |
| V2 | 0.95 | 1.1 | 1.075 | 1.090 | 1.091 | 0.992 | 1.100 | 1.080 | 1.013 | 1.078 | 0.950 | 1.100 |
| V5 | 0.95 | 1.1 | 1.049 | 1.071 | 1.072 | 0.978 | 1.100 | 1.067 | 1.037 | 0.975 | 1.100 | 1.100 |
| V8 | 0.95 | 1.1 | 1.046 | 1.076 | 1.079 | 0.950 | 1.100 | 0.962 | 1.100 | 1.100 | 1.100 | 1.100 |
| V11 | 0.95 | 1.1 | 1.100 | 1.100 | 1.071 | 1.047 | 1.100 | 1.073 | 1.082 | 1.100 | 0.950 | 1.100 |
| V13 | 0.95 | 1.1 | 1.069 | 1.062 | 1.038 | 0.950 | 1.100 | 1.087 | 0.970 | 1.047 | 1.100 | 1.100 |
| T11 | 0.9 | 1.1 | 1.037 | 1.007 | 1.059 | 0.959 | 1.090 | 0.977 | 0.938 | 1.020 | 1.100 | 1.100 |
| T12 | 0.9 | 1.1 | 0.997 | 1.087 | 1.084 | 0.900 | 1.090 | 0.943 | 1.055 | 1.073 | 0.965 | 1.100 |
| T15 | 0.9 | 1.1 | 1.027 | 1.099 | 1.095 | 0.938 | 1.090 | 1.023 | 1.063 | 1.080 | 0.900 | 1.100 |
| T36 | 0.9 | 1.1 | 0.957 | 1.024 | 1.087 | 0.900 | 1.090 | 1.017 | 1.024 | 1.054 | 0.900 | 1.100 |
| SVC1 Location | - | - | 24 | 27 | 6 | 19 | 22 | 27 | 11 | 21 | 25 | 29 |
| SVC2 Location | - | - | 7 | 27 | 10 | 9 | 15 | 6 | 20 | 30 | 25 | 30 |
| SVC1 Rating | −10 | 10 | 10.000 | 9.893 | −6.541 | 3.882 | 1.740 | −3.380 | 9.274 | 8.786 | 10.000 | 10.000 |
| SVC2 Rating | −10 | 10 | 5.764 | −6.277 | 1.209 | 5.482 | −3.094 | −9.559 | 0.639 | 8.550 | −10.000 | 4.480 |
| TCSC1 Location | - | - | 15 | 39 | 10 | 3 | 14 | 37 | 38 | 32 | 34 | 33 |
| TCSC2 Location | - | - | 12 | 29 | 20 | 4 | 32 | 36 | 24 | 37 | 41 | 39 |
| TCSC1 Rating | 0 | 0.5 | 0.491 | 0.219 | 0.218 | 0.000 | 0.452 | 0.110 | 0.196 | 0.497 | 0.000 | 0.500 |
| TCSC2 Rating | 0 | 0.5 | 0.496 | 0.239 | 0.440 | 0.000 | 0.492 | 0.454 | 0.060 | 0.485 | 0.193 | 0.500 |
| TCPS1 Location | - | - | 14 | 16 | 34 | 15 | 14 | 38 | 14 | 26 | 40 | 40 |
| TCPS2 Location | - | - | 16 | 22 | 19 | 1 | 30 | 35 | 5 | 32 | 1 | 41 |
| TCPS1 Rating | −5 | 5 | 2.714 | 4.503 | −3.990 | 3.917 | 1.235 | 4.787 | −0.175 | 0.926 | 5.000 | 5.000 |
| TCPS2 Rating | −5 | 5 | 1.705 | 3.761 | −4.281 | 1.150 | 0.113 | 4.095 | 1.148 | 4.860 | −3.963 | 4.566 |
| TFC ($/h) | 806.999 | 808.030 | 809.449 | 818.654 | 814.865 | - | - | - | - | - | ||
| Emission (Ton/h) | - | - | - | - | - | 0.138 | 0.138 | 0.138 | 0.138 | 0.138 | ||
| Control & State Variables | Min | Max | Case-3 | Case-4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GNDO | MVO | ALO | SCA | IMO | GNDO | MVO | ALO | SCA | IMO | |||
| PTG2 | 20 | 80 | 69.005 | 75.900 | 79.745 | 80.000 | 79.644 | 79.721 | 78.271 | 28.577 | 49.606 | 34.817 |
| PWG5 | 0 | 75 | 75.000 | 74.966 | 75.000 | 73.825 | 74.667 | 47.504 | 11.236 | 13.419 | 0.000 | 47.506 |
| PTG8 | 10 | 35 | 34.999 | 34.656 | 35.000 | 30.726 | 34.844 | 25.357 | 32.736 | 16.328 | 35.000 | 34.441 |
| PWG11 | 0 | 60 | 59.999 | 58.422 | 60.000 | 50.635 | 59.748 | 26.234 | 20.292 | 4.602 | 0.000 | 55.391 |
| PTG13 | 12 | 40 | 39.976 | 31.239 | 39.823 | 31.706 | 39.832 | 26.916 | 32.996 | 24.669 | 24.060 | 39.576 |
| V1 | 0.95 | 1.1 | 1.036 | 1.100 | 1.098 | 1.098 | 1.089 | 1.008 | 0.958 | 0.967 | 0.950 | 0.955 |
| V2 | 0.95 | 1.1 | 1.037 | 1.100 | 1.100 | 1.091 | 1.089 | 1.032 | 1.054 | 1.051 | 1.072 | 1.052 |
| V5 | 0.95 | 1.1 | 1.027 | 1.090 | 1.091 | 1.100 | 1.089 | 1.010 | 1.016 | 1.017 | 0.960 | 0.955 |
| V8 | 0.95 | 1.1 | 1.030 | 1.092 | 1.096 | 1.100 | 1.090 | 1.025 | 0.992 | 1.013 | 1.024 | 1.015 |
| V11 | 0.95 | 1.1 | 1.100 | 1.099 | 1.100 | 1.100 | 1.089 | 0.950 | 1.069 | 1.009 | 1.100 | 1.004 |
| V13 | 0.95 | 1.1 | 1.100 | 1.100 | 1.077 | 0.990 | 1.089 | 1.004 | 1.067 | 1.084 | 1.043 | 1.038 |
| T11 | 0.9 | 1.1 | 1.012 | 1.047 | 1.046 | 1.030 | 1.090 | 0.938 | 1.063 | 0.949 | 1.017 | 0.905 |
| T12 | 0.9 | 1.1 | 0.903 | 0.903 | 1.045 | 1.100 | 1.090 | 0.907 | 0.903 | 0.904 | 0.912 | 0.986 |
| T15 | 0.9 | 1.1 | 0.998 | 1.042 | 1.100 | 1.018 | 1.090 | 0.945 | 1.048 | 1.065 | 1.044 | 1.069 |
| T36 | 0.9 | 1.1 | 0.935 | 0.983 | 1.068 | 1.100 | 1.090 | 0.934 | 0.930 | 0.936 | 0.957 | 0.936 |
| SVC1 Location | - | - | 18 | 12 | 27 | 11 | 27 | 19 | 24 | 28 | 19 | 19 |
| SVC2 Location | - | - | 24 | 15 | 30 | 16 | 30 | 10 | 14 | 16 | 21 | 23 |
| SVC1 Rating | −10 | 10 | 4.901 | 6.871 | 3.951 | 6.535 | 9.956 | 8.082 | 8.769 | −1.898 | 4.969 | 9.593 |
| SVC2 Rating | −10 | 10 | 10.000 | 5.448 | 5.238 | −0.936 | 4.219 | 5.421 | −2.342 | −5.291 | −1.465 | 9.547 |
| TCSC1 Location | - | - | 34 | 5 | 40 | 3 | 40 | 14 | 13 | 2 | 2 | 40 |
| TCSC2 Location | - | - | 11 | 40 | 41 | 2 | 41 | 18 | 25 | 9 | 5 | 29 |
| TCSC1 Rating | 0 | 0.5 | 0.494 | 0.107 | 0.500 | 0.000 | 0.471 | 0.353 | 0.300 | 0.075 | 0.027 | 0.500 |
| TCSC2 Rating | 0 | 0.5 | 0.500 | 0.198 | 0.497 | 0.000 | 0.498 | 0.499 | 0.391 | 0.087 | 0.000 | 0.486 |
| TCPS1 Location | - | - | 16 | 12 | 40 | 4 | 33 | 19 | 38 | 3 | 1 | 37 |
| TCPS2 Location | - | - | 19 | 15 | 41 | 1 | 34 | 15 | 41 | 5 | 5 | 36 |
| TCPS1 Rating | −5 | 5 | 1.744 | −0.898 | −3.378 | 0.433 | 4.979 | −4.997 | 3.754 | −1.638 | 5.000 | 2.660 |
| TCPS2 Rating | −5 | 5 | 0.257 | 4.748 | −3.441 | 1.249 | 0.946 | 0.767 | 0.550 | −3.874 | 0.128 | −1.703 |
| APL (MW) | 1.647 | 1.735 | 1.686 | 2.482 | 1.880 | - | - | - | - | - | ||
| Voltage Deviation (p.u) | - | - | - | - | - | 0.124 | 0.150 | 0.177 | 0.227 | 0.165 | ||
| Control & State Variables | Min | Max | Case-5 | Case-6 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GNDO | MVO | ALO | SCA | IMO | GNDO | MVO | ALO | SCA | IMO | |||
| PTG2 | 20 | 80 | 78.161 | 28.765 | 76.487 | 20.000 | 74.363 | 44.894 | 47.802 | 55.203 | 20.000 | 56.164 |
| PWG5 | 0 | 75 | 75.000 | 16.020 | 74.240 | 0.000 | 67.677 | 74.998 | 74.564 | 71.256 | 75.000 | 68.555 |
| PTG8 | 10 | 35 | 35.000 | 34.855 | 34.405 | 10.000 | 32.815 | 35.000 | 32.893 | 33.271 | 35.000 | 30.826 |
| PWG11 | 0 | 60 | 54.355 | 0.000 | 55.983 | 49.379 | 14.173 | 59.006 | 58.030 | 50.102 | 60.000 | 58.732 |
| PTG13 | 12 | 40 | 12.001 | 28.840 | 38.080 | 16.659 | 35.961 | 21.583 | 22.222 | 32.274 | 19.540 | 23.229 |
| V1 | 0.95 | 1.1 | 1.100 | 1.100 | 1.100 | 1.100 | 1.097 | 1.046 | 1.100 | 1.100 | 1.100 | 1.100 |
| V2 | 0.95 | 1.1 | 1.100 | 1.100 | 1.100 | 1.100 | 1.097 | 1.042 | 1.097 | 1.098 | 1.100 | 1.100 |
| V5 | 0.95 | 1.1 | 1.100 | 1.100 | 1.100 | 1.100 | 1.097 | 1.032 | 1.087 | 1.087 | 1.100 | 1.100 |
| V8 | 0.95 | 1.1 | 1.100 | 1.100 | 1.100 | 1.100 | 1.097 | 1.035 | 1.092 | 1.091 | 1.100 | 1.098 |
| V11 | 0.95 | 1.1 | 1.100 | 1.100 | 1.100 | 1.100 | 1.097 | 1.098 | 1.100 | 1.100 | 1.100 | 1.100 |
| V13 | 0.95 | 1.1 | 1.100 | 1.100 | 1.100 | 1.100 | 1.097 | 1.035 | 1.100 | 1.083 | 1.100 | 1.098 |
| T11 | 0.9 | 1.1 | 0.905 | 0.910 | 0.990 | 1.100 | 1.089 | 1.077 | 1.054 | 1.007 | 1.100 | 1.084 |
| T12 | 0.9 | 1.1 | 0.904 | 0.909 | 0.990 | 0.900 | 1.089 | 0.901 | 0.903 | 1.089 | 1.100 | 1.084 |
| T15 | 0.9 | 1.1 | 0.901 | 0.900 | 0.930 | 0.900 | 1.089 | 1.065 | 1.053 | 1.081 | 1.100 | 1.100 |
| T36 | 0.9 | 1.1 | 0.901 | 0.909 | 0.910 | 0.900 | 0.910 | 0.985 | 1.001 | 1.033 | 1.100 | 1.087 |
| SVC1 Location | - | - | 10 | 29 | 29 | 29 | 26 | 24 | 28 | 26 | 15 | 24 |
| SVC2 Location | - | - | 29 | 30 | 30 | 30 | 26 | 13 | 14 | 26 | 3 | 10 |
| SVC1 Rating | −10 | 10 | 9.999 | 4.260 | 7.322 | 10.000 | 9.312 | 9.999 | −3.639 | 3.886 | 10.000 | 8.490 |
| SVC2 Rating | −10 | 10 | 9.999 | 2.982 | 9.608 | 9.747 | 9.622 | 3.844 | −1.487 | 3.411 | −0.065 | 7.591 |
| TCSC1 Location | - | - | 38 | 38 | 38 | 24 | 36 | 16 | 7 | 39 | 1 | 18 |
| TCSC2 Location | - | - | 15 | 36 | 40 | 1 | 38 | 19 | 29 | 34 | 3 | 31 |
| TCSC1 Rating | 0 | 0.5 | 0.500 | 0.490 | 0.500 | 0.002 | 0.499 | 0.500 | 0.468 | 0.470 | 0.002 | 0.500 |
| TCSC2 Rating | 0 | 0.5 | 0.500 | 0.325 | 0.475 | 0.013 | 0.499 | 0.013 | 0.490 | 0.355 | 0.000 | 0.147 |
| TCPS1 Location | - | - | 36 | 4 | 33 | 3 | 38 | 14 | 4 | 35 | 31 | 30 |
| TCPS2 Location | - | - | 41 | 17 | 38 | 1 | 39 | 4 | 2 | 25 | 11 | 33 |
| TCPS1 Rating | −5 | 5 | −4.999 | 3.788 | 4.884 | −5.000 | 4.540 | 3.173 | 0.486 | 4.591 | 2.761 | 1.494 |
| TCPS2 Rating | −5 | 5 | −4.998 | 1.993 | 4.772 | −1.126 | 4.697 | −0.508 | −1.527 | −0.901 | 5.000 | 2.191 |
| VSI | 0.096 | 0.100 | 0.096 | 0.108 | 0.102 | - | - | - | - | - | ||
| Total Gross Fuel Cost ($/h) | - | - | - | - | - | 1120.996 | 1125.970 | 1138.357 | 1187.287 | 1148.359 | ||
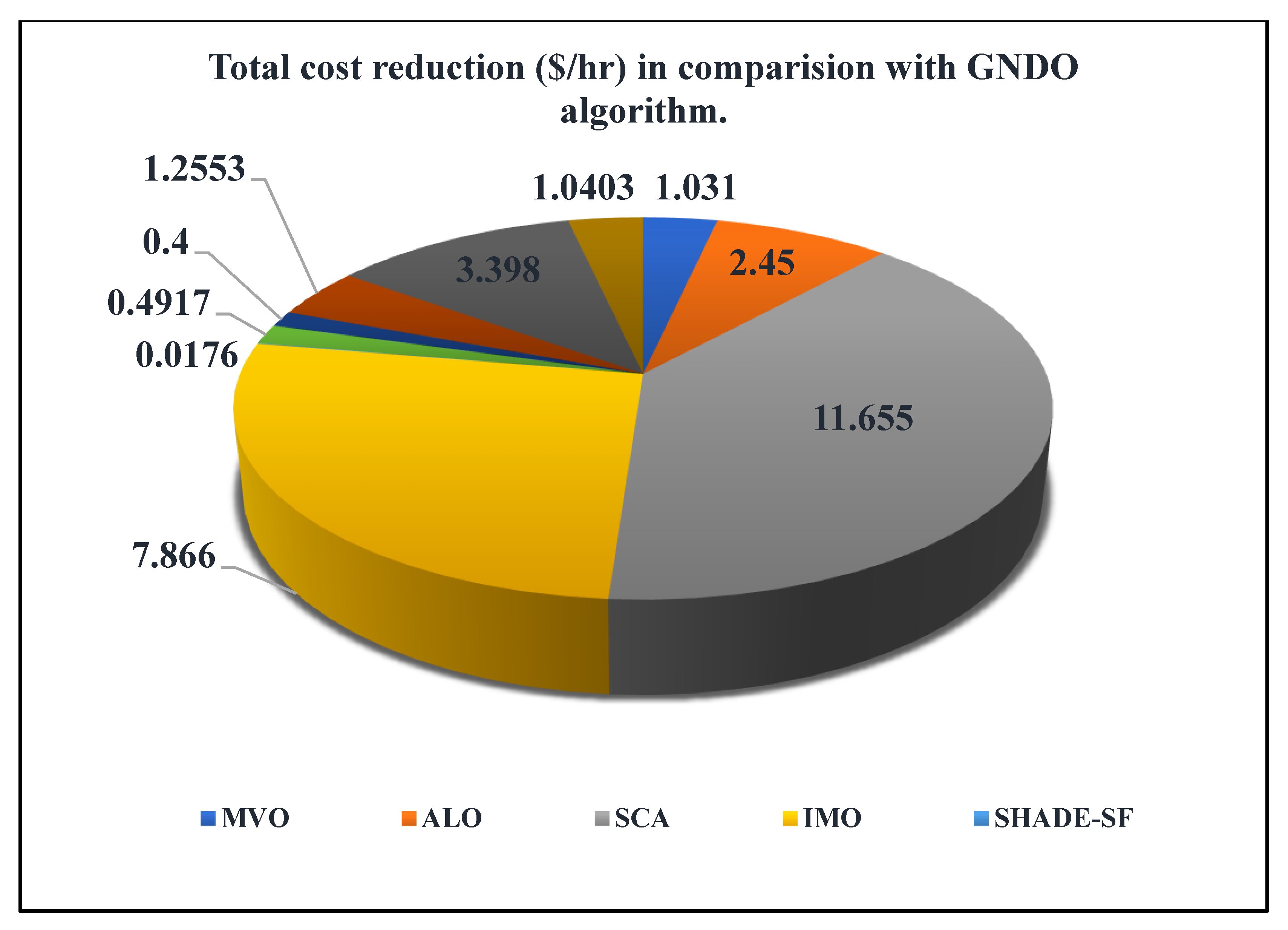
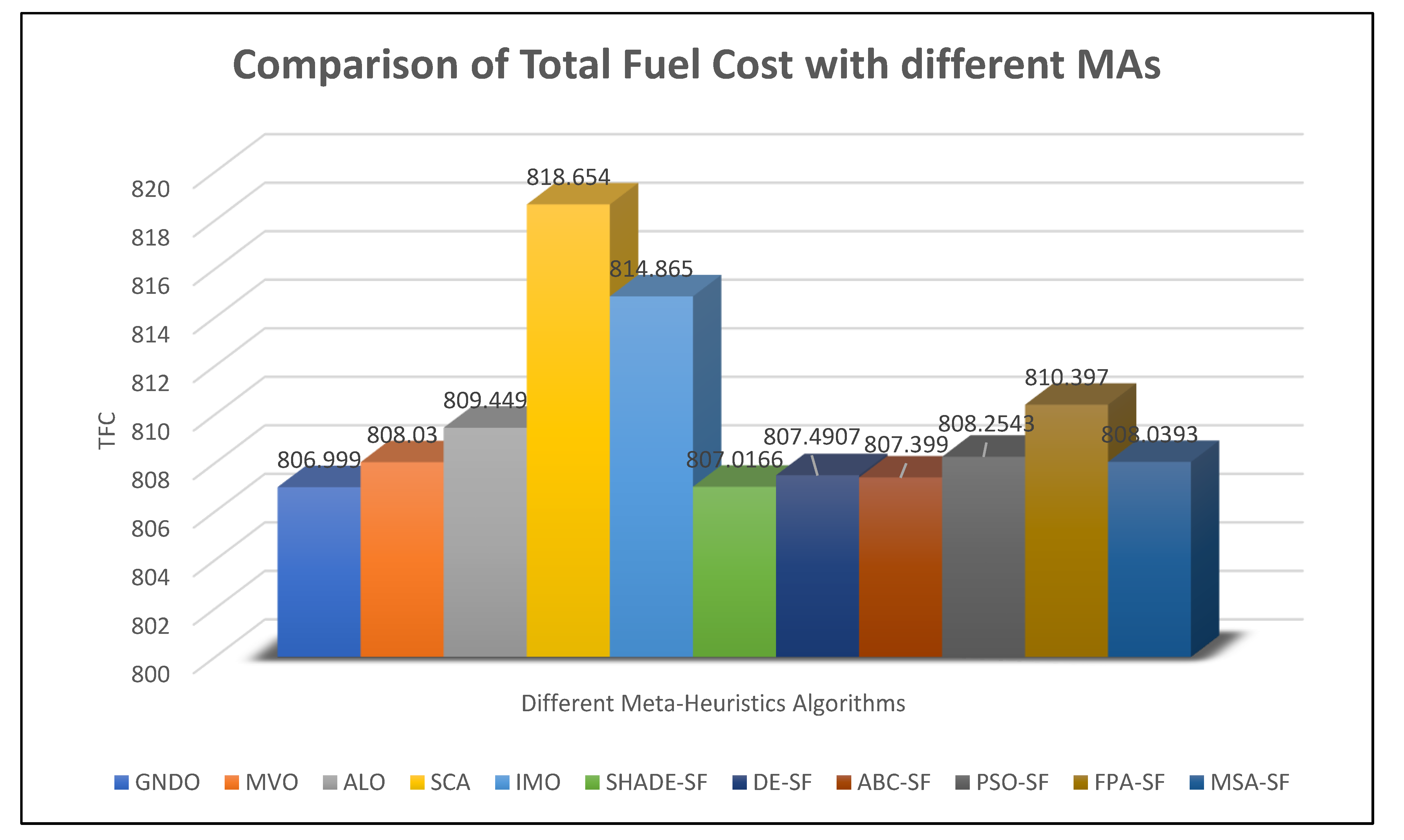
| Objectives Functions | GNDO | MVO | ALO | SCA | IMO | SHADE-SF | DE-SF | ABC-SF | PSO-SF | FPA-SF | MSA-SF |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Total F.C ($/h) | 806.999 | 808.030 | 809.449 | 818.654 | 814.865 | 807.0166 | 807.4907 | 807.399 | 808.2543 | 810.397 | 808.0393 |
| Emission (T/h) | 0.138 | 0.138 | 0.138 | 0.138 | 0.138 | - | - | - | - | - | - |
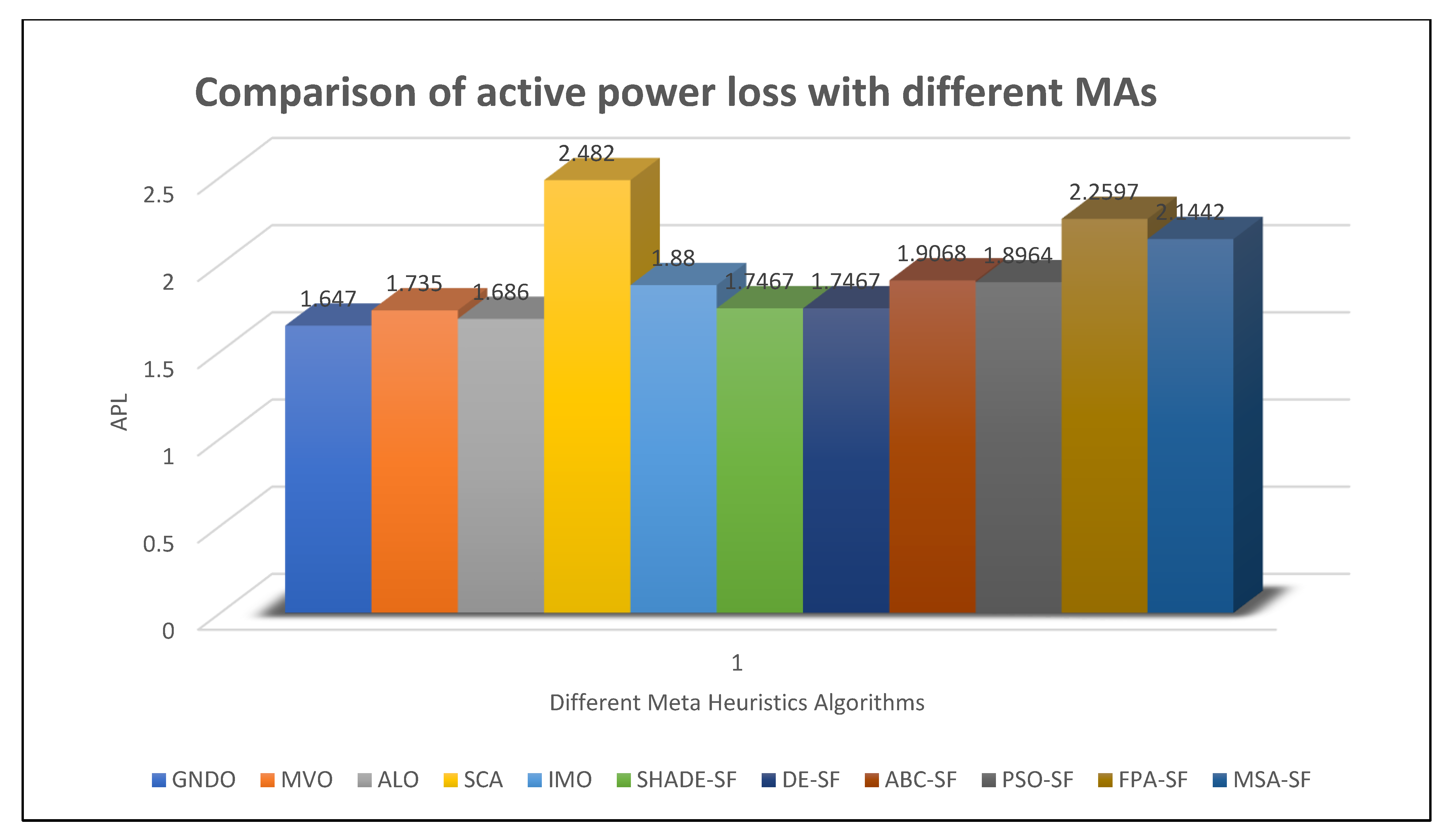
| Ploss (MW) | 1.647 | 1.735 | 1.686 | 2.482 | 1.880 | 1.7467 | 1.7467 | 1.9068 | 1.8964 | 2.2597 | 2.1442 |
| V.D (p.u) | 0.124 | 0.150 | 0.177 | 0.227 | 0.165 | - | - | - | - | - | - |
| Lmax | 0.096 | 0.100 | 0.096 | 0.108 | 0.102 | - | - | - | - | - | - |
| Total Gross F.C ($/h) | 1120.996 | 1125.970 | 1138.357 | 1187.287 | 1148.359 | 1104.077 | 1113.676 | 1116.365 | 1118.601 | 1164.719 | 1122.331 |
| Control & State Variables | Min | Max | Case-7 | Case-8 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| GNDO | GWO | MFO | MVO | GNDO | GWO | MFO | MVO | |||
| PTG2 | 20 | 80 | 45.896 | 54.592 | 47.915 | 47.568 | 31.212 | 44.406 | 40.200 | 37.027 |
| PWG5 | 0 | 75 | 54.828 | 58.922 | 53.220 | 52.055 | 64.776 | 65.069 | 60.990 | 63.027 |
| PTG8 | 10 | 35 | 23.322 | 20.821 | 25.403 | 24.401 | 17.913 | 23.015 | 25.019 | 24.049 |
| PWG11 | 0 | 60 | 46.878 | 42.848 | 41.484 | 46.116 | 48.381 | 51.171 | 51.429 | 43.893 |
| PTG13 | 12 | 40 | 19.171 | 17.914 | 22.285 | 22.094 | 14.453 | 23.604 | 19.015 | 14.758 |
| V1 | 0.95 | 1.1 | 1.031 | 1.043 | 1.067 | 1.036 | 1.085 | 1.099 | 1.087 | 1.065 |
| V2 | 0.95 | 1.1 | 1.027 | 1.019 | 1.055 | 1.025 | 1.075 | 1.090 | 1.082 | 1.049 |
| V5 | 0.95 | 1.1 | 1.022 | 1.000 | 1.029 | 1.010 | 1.057 | 1.077 | 1.069 | 1.027 |
| V8 | 0.95 | 1.1 | 1.023 | 1.001 | 1.032 | 1.020 | 1.054 | 1.071 | 1.074 | 1.041 |
| V11 | 0.95 | 1.1 | 1.031 | 1.035 | 1.039 | 1.022 | 1.087 | 1.077 | 1.073 | 1.069 |
| V13 | 0.95 | 1.1 | 1.026 | 1.020 | 1.045 | 1.029 | 1.075 | 1.079 | 1.052 | 1.037 |
| T11 | 0.9 | 1.1 | 0.986 | 0.956 | 1.007 | 0.987 | 0.972 | 1.003 | 1.034 | 1.016 |
| T12 | 0.9 | 1.1 | 1.006 | 0.966 | 1.002 | 1.001 | 1.020 | 1.037 | 1.045 | 0.966 |
| T15 | 0.9 | 1.1 | 1.041 | 0.953 | 1.051 | 1.038 | 1.049 | 1.071 | 1.057 | 1.017 |
| T36 | 0.9 | 1.1 | 1.003 | 0.956 | 1.012 | 0.981 | 0.990 | 0.996 | 1.033 | 1.004 |
| SVC1 Location | -- | -- | 15 | 11 | 15 | 14 | 12 | 22 | 16 | 19 |
| SVC2 Location | -- | -- | 22 | 25 | 19 | 10 | 17 | 12 | 23 | 13 |
| SVC1 Rating | −10 | 10 | 0.696 | 0.846 | −1.633 | 2.629 | −0.018 | 8.596 | −3.998 | 6.891 |
| SVC2 Rating | −10 | 10 | 4.611 | 5.523 | −0.549 | 1.422 | 3.179 | −3.651 | 3.231 | 2.030 |
| TCSC1 Location | -- | -- | 24 | 13 | 15 | 18 | 12 | 19 | 20 | 20 |
| TCSC2 Location | -- | -- | 16 | 17 | 26 | 14 | 27 | 14 | 25 | 17 |
| TCSC1 Rating | 0 | 0.5 | 0.294 | 0.480 | 0.221 | 0.261 | 0.437 | 0.403 | 0.279 | 0.204 |
| TCSC2 Rating | 0 | 0.5 | 0.213 | 0.202 | 0.160 | 0.243 | 0.144 | 0.357 | 0.322 | 0.184 |
| TCPS1 Location | -- | -- | 19 | 16 | 23 | 23 | 28 | 25 | 21 | 20 |
| TCPS2 Location | -- | -- | 22 | 26 | 33 | 23 | 14 | 15 | 31 | 19 |
| TCPS1 Rating | −5 | 5 | −1.239 | −2.128 | −1.398 | −0.747 | 0.304 | 0.797 | −0.187 | 0.372 |
| TCPS2 Rating | −5 | 5 | 1.618 | −0.298 | 0.373 | 0.018 | 0.988 | −4.113 | 1.473 | 0.005 |
| TFC ($/h) | -- | -- | 861.489 | 865.902 | 863.797 | 865.736 | 845.768 | 883.242 | 870.299 | 852.611 |
| Emission (Ton/h) | -- | -- | 0.166 | 0.164 | 0.165 | 0.163 | -- | -- | -- | -- |
| APL (MW) | -- | -- | -- | -- | -- | -- | 4.010 | 3.024 | 3.458 | 4.066 |
| Control & State Variables | Min | Max | Case-9 | Case-10 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| GNDO | GWO | MFO | MVO | GNDO | GWO | MFO | MVO | |||
| PTG2 | 20 | 80 | 41.854 | 40.056 | 35.406 | 41.929 | 52.339 | 50.960 | 47.711 | 57.834 |
| PWG5 | 0 | 75 | 46.213 | 44.290 | 45.659 | 43.000 | 73.729 | 59.378 | 67.052 | 72.012 |
| PTG8 | 10 | 35 | 10.539 | 17.206 | 12.905 | 17.794 | 27.548 | 33.079 | 25.001 | 34.062 |
| PWG11 | 0 | 60 | 40.507 | 37.047 | 42.067 | 37.374 | 55.547 | 50.930 | 47.004 | 45.086 |
| PTG13 | 12 | 40 | 14.441 | 14.583 | 17.107 | 15.543 | 25.046 | 28.260 | 33.662 | 29.799 |
| V1 | 0.95 | 1.1 | 1.095 | 1.085 | 1.077 | 1.077 | 1.027 | 1.045 | 1.039 | 1.019 |
| V2 | 0.95 | 1.1 | 1.088 | 1.068 | 1.070 | 1.062 | 1.026 | 1.036 | 1.037 | 1.030 |
| V5 | 0.95 | 1.1 | 1.082 | 1.054 | 1.052 | 1.035 | 1.021 | 1.024 | 1.026 | 1.017 |
| V8 | 0.95 | 1.1 | 1.089 | 1.081 | 1.081 | 1.078 | 1.011 | 1.016 | 1.009 | 1.004 |
| V11 | 0.95 | 1.1 | 1.081 | 1.067 | 1.082 | 1.081 | 1.042 | 1.072 | 1.048 | 1.033 |
| V13 | 0.95 | 1.1 | 1.093 | 1.082 | 1.078 | 1.080 | 1.031 | 1.010 | 1.036 | 1.045 |
| T11 | 0.9 | 1.1 | 1.022 | 0.979 | 0.971 | 1.001 | 0.984 | 1.010 | 1.032 | 0.979 |
| T12 | 0.9 | 1.1 | 0.957 | 0.945 | 0.959 | 1.012 | 0.963 | 0.956 | 0.949 | 0.929 |
| T15 | 0.9 | 1.1 | 1.005 | 1.017 | 0.979 | 0.981 | 0.964 | 0.964 | 0.985 | 0.980 |
| T36 | 0.9 | 1.1 | 0.909 | 0.906 | 0.927 | 0.910 | 0.947 | 0.933 | 0.943 | 0.946 |
| SVC1 Location | - | - | 17 | 21 | 15 | 21 | 8 | 23 | 22 | 9 |
| SVC2 Location | - | - | 24 | 14 | 22 | 27 | 19 | 10 | 19 | 19 |
| SVC1 Rating | −10 | 10 | 7.270 | 1.629 | 1.395 | 3.604 | 0.703 | 6.496 | 0.374 | −0.378 |
| SVC2 Rating | −10 | 10 | 8.303 | 3.620 | 6.583 | 8.418 | 6.197 | −2.454 | 6.193 | 4.988 |
| TCSC1 Location | - | - | 38 | 38 | 21 | 15 | 14 | 7 | 11 | 26 |
| TCSC2 Location | - | - | 16 | 15 | 38 | 13 | 30 | 24 | 28 | 27 |
| TCSC1 Rating | 0 | 0.5 | 0.470 | 0.446 | 0.273 | 0.473 | 0.281 | 0.097 | 0.357 | 0.309 |
| TCSC2 Rating | 0 | 0.5 | 0.487 | 0.410 | 0.403 | 0.438 | 0.186 | 0.433 | 0.412 | 0.384 |
| TCPS1 Location | - | - | 30 | 13 | 11 | 14 | 23 | 15 | 25 | 31 |
| TCPS2 Location | - | - | 31 | 7 | 14 | 23 | 29 | 14 | 28 | 15 |
| TCPS1 Rating | −5 | 5 | 1.527 | 0.693 | 0.001 | 0.286 | 0.888 | 1.063 | 0.635 | 2.025 |
| TCPS2 Rating | −5 | 5 | 2.980 | −0.065 | −1.394 | −0.272 | 0.240 | 2.646 | 0.126 | −0.864 |
| TFC ($/h) | - | - | 810.049 | 814.201 | 813.755 | 817.163 | - | - | - | - |
| VSI | - | - | 0.105 | 0.110 | 0.116 | 0.115 | - | - | - | - |
| Total Gross F.C ($/h) | - | - | - | - | - | - | 1173.322 | 1208.416 | 1212.959 | 1199.459 |
| Voltage Deviation (p.u) | - | - | - | - | - | - | 0.176 | 0.230 | 0.209 | 0.169 |
| Control & State variables | Min | Max | Case-11 | Case-12 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| GNDO | GWO | MFO | MVO | GNDO | GWO | MFO | MVO | |||
| PTG2 | 20 | 80 | 45.293 | 44.975 | 50.298 | 45.856 | 31.589 | 60.147 | 33.799 | 36.035 |
| PWG5 | 0 | 75 | 60.666 | 68.795 | 62.294 | 57.155 | 62.042 | 61.717 | 66.094 | 52.766 |
| PTG8 | 10 | 35 | 24.271 | 24.485 | 27.179 | 26.031 | 24.651 | 27.550 | 25.232 | 25.207 |
| PWG11 | 0 | 60 | 46.551 | 47.899 | 53.206 | 47.440 | 40.375 | 57.220 | 45.112 | 41.884 |
| PTG13 | 12 | 40 | 19.146 | 17.287 | 20.734 | 14.419 | 18.307 | 15.569 | 16.090 | 19.407 |
| V1 | 0.95 | 1.1 | 1.033 | 1.093 | 1.060 | 1.015 | 1.066 | 1.046 | 1.077 | 1.045 |
| V2 | 0.95 | 1.1 | 1.019 | 1.086 | 1.060 | 1.008 | 1.058 | 1.040 | 1.063 | 1.032 |
| V5 | 0.95 | 1.1 | 0.997 | 1.069 | 1.055 | 1.001 | 1.040 | 0.996 | 1.041 | 1.017 |
| V8 | 0.95 | 1.1 | 1.015 | 1.081 | 1.051 | 1.006 | 1.046 | 1.039 | 1.039 | 1.009 |
| V11 | 0.95 | 1.1 | 1.020 | 1.040 | 1.055 | 1.051 | 1.051 | 1.075 | 1.034 | 1.037 |
| V13 | 0.95 | 1.1 | 1.035 | 1.051 | 1.021 | 1.019 | 1.028 | 1.029 | 1.052 | 1.050 |
| T11 | 0.9 | 1.1 | 1.000 | 0.972 | 0.999 | 0.966 | 0.987 | 0.963 | 0.963 | 0.964 |
| T12 | 0.9 | 1.1 | 1.003 | 1.070 | 1.055 | 1.007 | 1.020 | 0.976 | 1.002 | 0.973 |
| T15 | 0.9 | 1.1 | 1.061 | 1.099 | 1.075 | 1.043 | 1.035 | 1.087 | 1.051 | 1.015 |
| T36 | 0.9 | 1.1 | 0.952 | 1.076 | 1.024 | 0.985 | 0.964 | 0.974 | 0.964 | 0.965 |
| SVC1 Location | - | - | 11 | 21 | 13 | 18 | 14 | 15 | 18 | 18 |
| SVC2 Location | - | - | 13 | 12 | 15 | 8 | 20 | 23 | 19 | 18 |
| SVC1 Rating | −10 | 10 | 0.495 | 6.230 | −2.056 | −0.109 | 0.057 | 3.863 | −0.308 | −2.293 |
| SVC2 Rating | −10 | 10 | 3.861 | 4.665 | 5.159 | 8.132 | 0.599 | 3.889 | −0.818 | 7.033 |
| TCSC1 Location | - | - | 20 | 16 | 21 | 4 | 26 | 39 | 25 | 24 |
| TCSC2 Location | - | - | 19 | 24 | 24 | 22 | 17 | 22 | 18 | 23 |
| TCSC1 Rating | 0 | 0.5 | 0.173 | 0.269 | 0.306 | 0.331 | 0.217 | 0.101 | 0.133 | 0.278 |
| TCSC2 Rating | 0 | 0.5 | 0.205 | 0.288 | 0.336 | 0.365 | 0.312 | 0.194 | 0.259 | 0.237 |
| TCPS1 Location | - | - | 15 | 24 | 30 | 8 | 20 | 19 | 17 | 25 |
| TCPS2 Location | - | - | 14 | 34 | 20 | 36 | 16 | 20 | 22 | 5 |
| TCPS1 Rating | −5 | 5 | 0.083 | −2.213 | 1.397 | −0.222 | 0.555 | −0.891 | 0.384 | 0.657 |
| TCPS2 Rating | −5 | 5 | 2.118 | −0.241 | 0.863 | 0.454 | −0.207 | −1.208 | −0.652 | 0.936 |
| TFC ($/h) | - | - | 868.806 | 877.252 | 887.402 | 860.794 | 849.334 | 893.297 | 860.198 | 845.253 |
| Emission (Ton/h) | - | - | 0.162 | 0.157 | 0.150 | 0.167 | - | - | - | - |
| APL (MW) | - | - | 4.034 | 3.370 | 3.254 | 4.347 | 4.328 | 3.453 | 3.922 | 4.825 |
| VSI | - | - | - | - | - | - | 0.416 | 0.356 | 0.378 | 0.269 |
| Control & State Variables | Min | Max | Case-13 | |||
|---|---|---|---|---|---|---|
| GNDO | GWO | MFO | MVO | |||
| PTG2 | 20 | 80 | 49.763 | 52.443 | 59.634 | 45.029 |
| PWG5 | 0 | 75 | 47.291 | 62.622 | 61.404 | 53.782 |
| PTG8 | 10 | 35 | 26.717 | 13.340 | 15.911 | 17.846 |
| PWG11 | 0 | 60 | 29.206 | 58.719 | 47.380 | 47.174 |
| PTG13 | 12 | 40 | 26.888 | 19.443 | 18.672 | 18.177 |
| V1 | 0.95 | 1.1 | 1.048 | 1.034 | 1.041 | 1.053 |
| V2 | 0.95 | 1.1 | 1.038 | 1.012 | 1.027 | 1.051 |
| V5 | 0.95 | 1.1 | 1.028 | 0.980 | 0.990 | 1.009 |
| V8 | 0.95 | 1.1 | 1.040 | 0.998 | 1.026 | 1.027 |
| V11 | 0.95 | 1.1 | 1.053 | 1.069 | 1.047 | 1.024 |
| V13 | 0.95 | 1.1 | 1.029 | 1.054 | 1.051 | 1.021 |
| T11 | 0.9 | 1.1 | 1.012 | 0.931 | 0.974 | 0.978 |
| T12 | 0.9 | 1.1 | 0.968 | 1.046 | 0.994 | 1.005 |
| T15 | 0.9 | 1.1 | 1.023 | 0.975 | 1.032 | 1.055 |
| T36 | 0.9 | 1.1 | 0.969 | 0.943 | 1.006 | 0.967 |
| SVC1 Location | - | - | 10 | 15 | 24 | 20 |
| SVC2 Location | - | - | 18 | 25 | 15 | 20 |
| SVC1 Rating | −10 | 10 | −4.176 | 6.233 | 1.560 | 1.932 |
| SVC2 Rating | −10 | 10 | 3.745 | 6.259 | 4.766 | 0.737 |
| TCSC1 Location | - | - | 22 | 6 | 31 | 19 |
| TCSC2 Location | - | - | 19 | 27 | 17 | 22 |
| TCSC1 Rating | 0 | 0.5 | 0.423 | 0.208 | 0.168 | 0.228 |
| TCSC2 Rating | 0 | 0.5 | 0.278 | 0.300 | 0.125 | 0.114 |
| TCPS1 Location | - | - | 20 | 28 | 27 | 20 |
| TCPS2 Location | - | - | 27 | 26 | 32 | 20 |
| TCPS1 Rating | −5 | 5 | −0.164 | −3.317 | −0.896 | −0.585 |
| TCPS2 Rating | −5 | 5 | 1.413 | −2.786 | −0.976 | 0.658 |
| TFC ($/h) | 863.417 | 883.480 | 874.361 | 850.096 | ||
| Emission (Ton/h) | 0.173 | 0.157 | 0.160 | 0.175 | ||
| APL (MW) | 5.189 | 4.628 | 4.265 | 4.809 | ||
| Voltage Deviation (p.u) | 0.359 | 0.225 | 0.450 | 0.529 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pandya, S.B.; Visumathi, J.; Mahdal, M.; Mahanta, T.K.; Jangir, P. A Novel MOGNDO Algorithm for Security-Constrained Optimal Power Flow Problems. Electronics 2022, 11, 3825. https://doi.org/10.3390/electronics11223825
Pandya SB, Visumathi J, Mahdal M, Mahanta TK, Jangir P. A Novel MOGNDO Algorithm for Security-Constrained Optimal Power Flow Problems. Electronics. 2022; 11(22):3825. https://doi.org/10.3390/electronics11223825
Chicago/Turabian StylePandya, Sundaram B., James Visumathi, Miroslav Mahdal, Tapan K. Mahanta, and Pradeep Jangir. 2022. "A Novel MOGNDO Algorithm for Security-Constrained Optimal Power Flow Problems" Electronics 11, no. 22: 3825. https://doi.org/10.3390/electronics11223825
APA StylePandya, S. B., Visumathi, J., Mahdal, M., Mahanta, T. K., & Jangir, P. (2022). A Novel MOGNDO Algorithm for Security-Constrained Optimal Power Flow Problems. Electronics, 11(22), 3825. https://doi.org/10.3390/electronics11223825