
State-of-Art Review of Traffic Light Synchronization for Intelligent Vehicles: Current Status, Challenges, and Emerging Trends


Abstract
:1. Introduction
- To explore the key role of real-time traffic signal control technology in managing congestion at road junctions within smart cities.
- To summarize the benefits and implementation status of traffic light synchronization and directions for future research for networking traffic lights at intersections of roads.
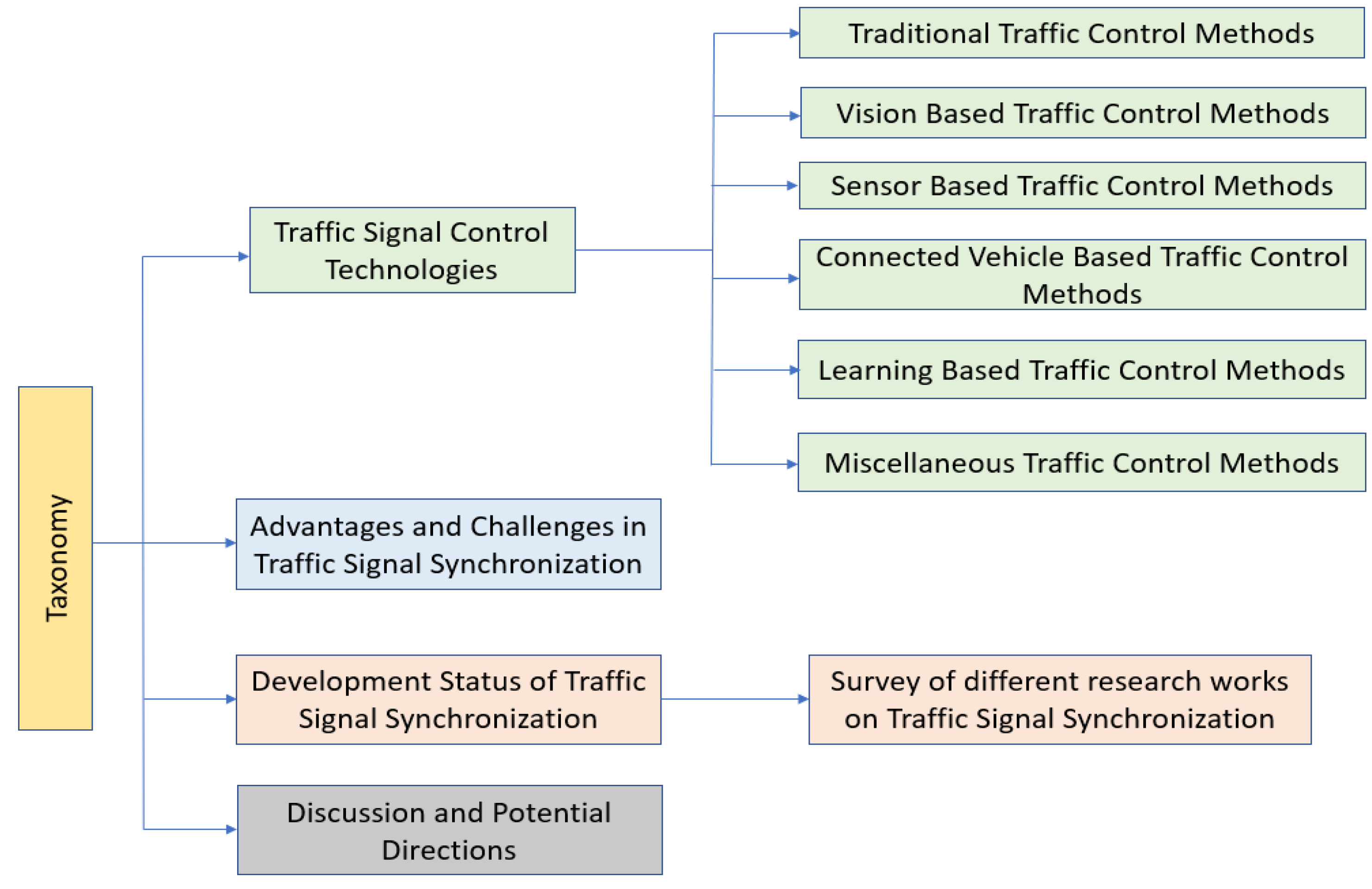
2. Background of Traffic Signal Synchronization for Intelligent Vehicles
2.1. Overview of the Traffic Signal Control Technology
2.1.1. Traditional Traffic Control Methods
2.1.2. Vision-Based Traffic Control Methods
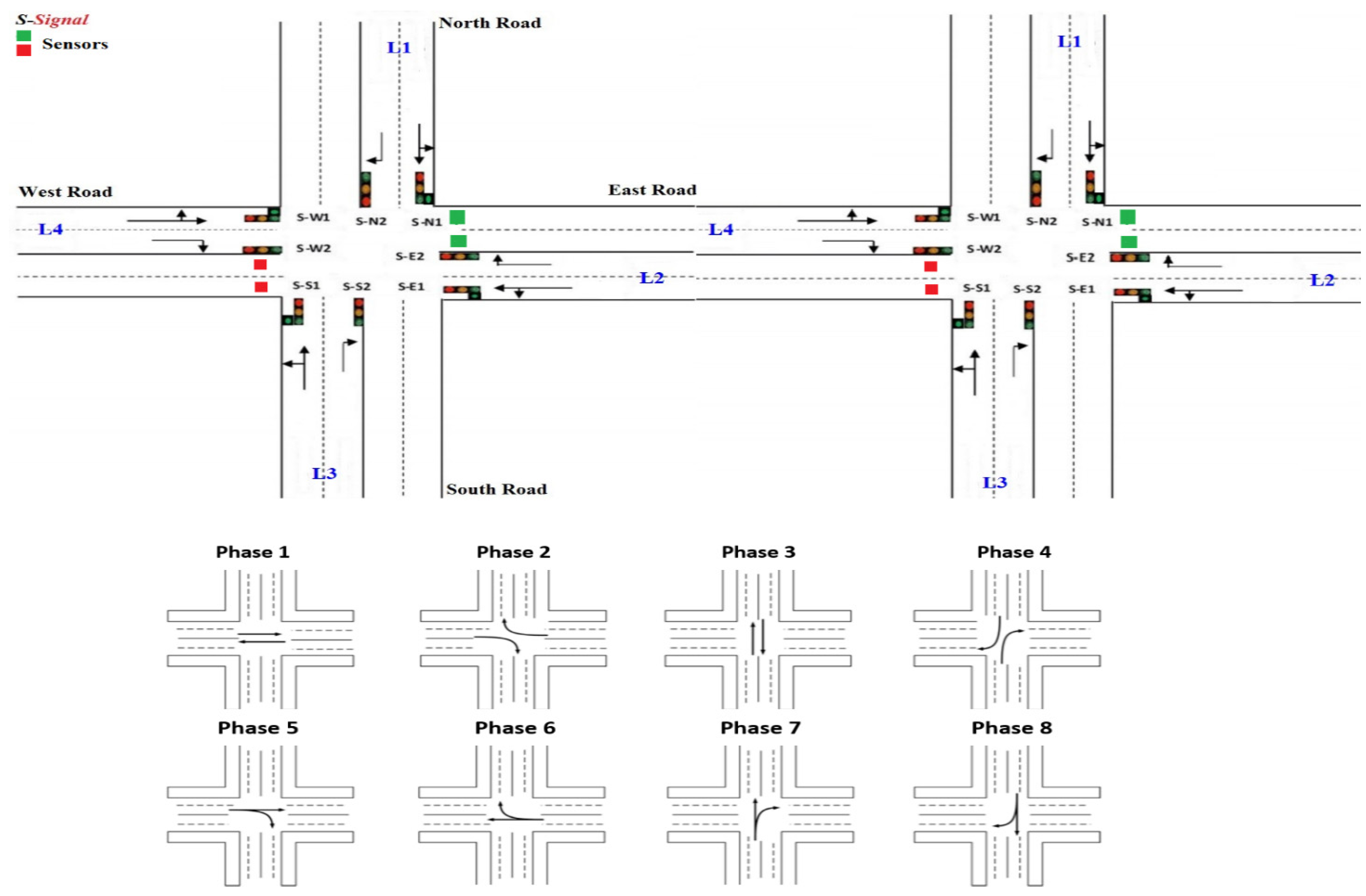
2.1.3. Sensor-Based Traffic Control Methods
2.1.4. Connected Vehicle-Based Traffic Control Methods
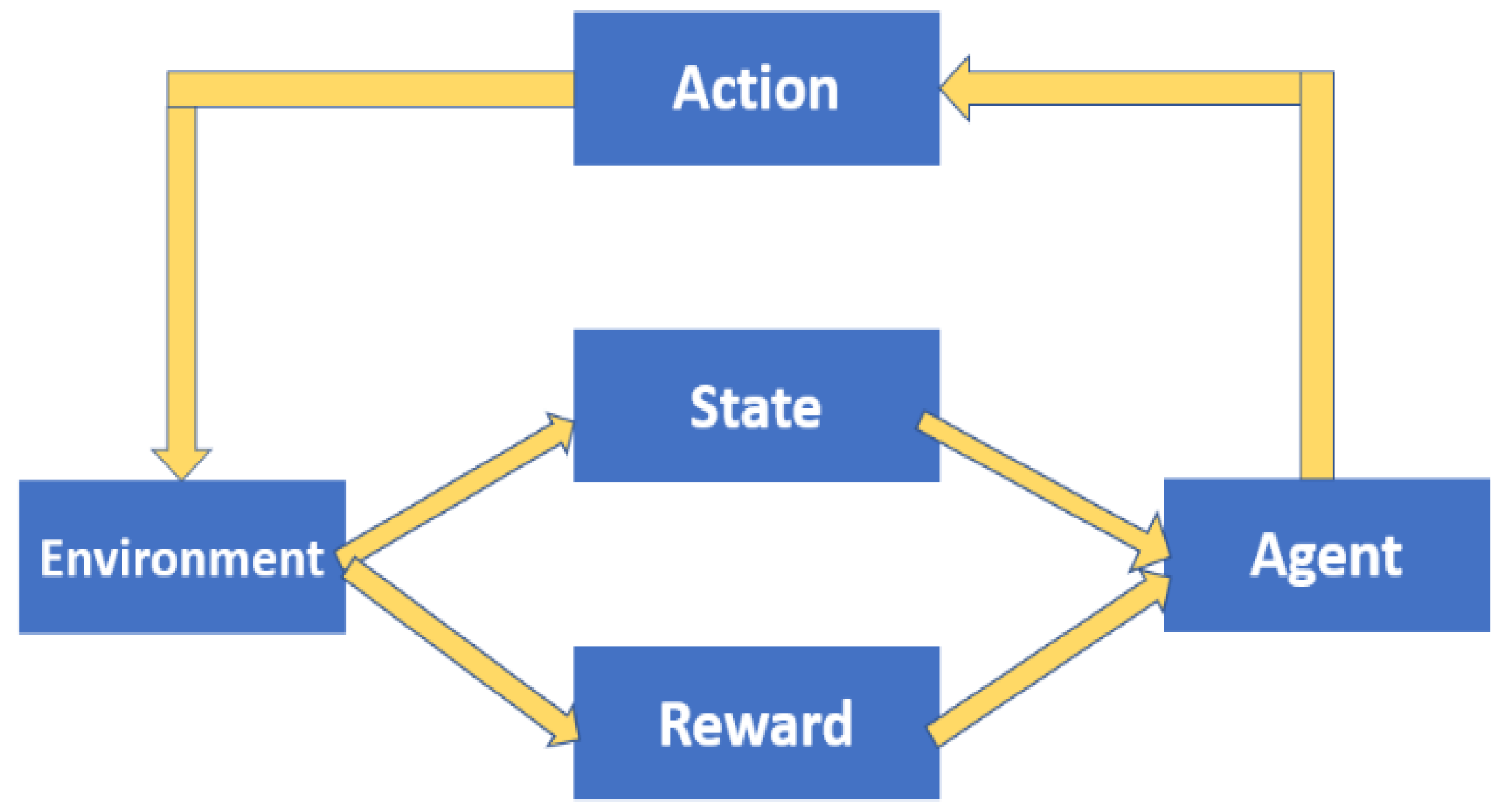
2.1.5. Learning-Based Traffic Control Methods
2.1.6. Miscellaneous Traffic Control Methods
3. Advantages of Synchronizing the Traffic Lights
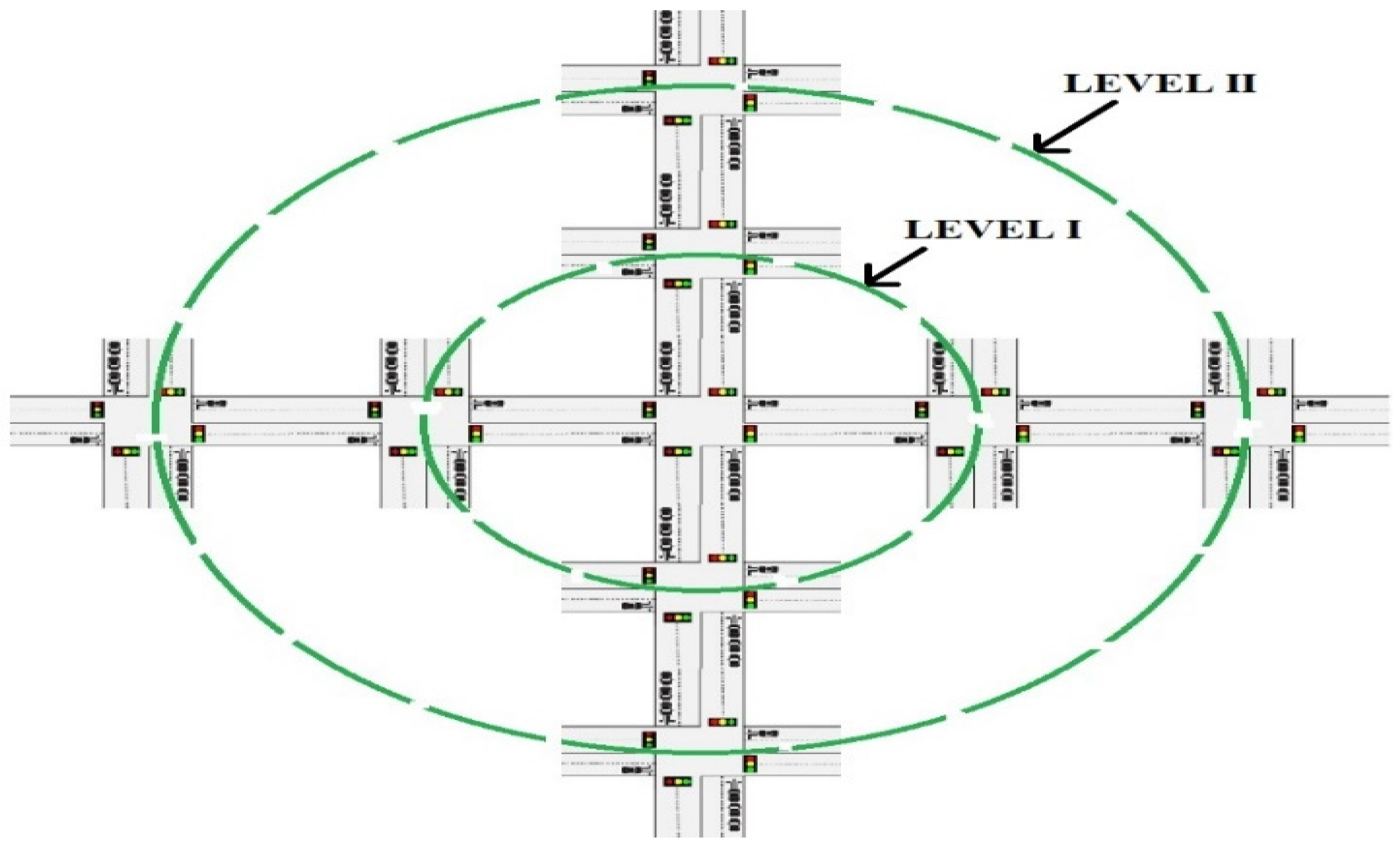
4. Development Status of Synchronization of Traffic Lights
5. Discussion and Potential Directions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference Number | Objective | Strategies Used | Disadvantages | Comments |
|---|---|---|---|---|
| [62] | Traffic light synchronization strategy for saturated road networks | Long green and long red method for highly saturated road networks | Not suitable to the undersaturated HGRN |
|
| [63] | To synchronize traffic signals | Multiagent fuzzy logic and Q-learning |
| |
| [64] | Traffic signal synchronization with dynamic timer value | Image processing and Raspberry Pi in synchronization with cloud |
|
|
| [65] | Self-organized traffic light control based on sensors |
| No synchronization of traffic signals | Increases traffic flow efficiency and reduce the waiting time at intersections |
| [67] | Wireless traffic light synchronization system |
| For single-lane traffic control only |
|
| [68] | Rerouting and synchronization of traffic | Using the Long Range (LoRa) module | Synchronization for two traffic signals only |
|
| [69] | Synchronization scheme for traffic light controller |
| Difficulty of modeling the FSM | Flexible architecture that uses a clock divider to give a delay in a certain state |
| [71] | Distributed traffic signal control method based on spontaneous synchronization |
| Mathematical complexity |
|
| [72,73] | Distributed approach for synchronizing traffic signals | CTM-UT i.e., (Cell Transmission Model for Urban Traffic) via simulation | Computational complexity | Surrogate method (SM), based on an online and stochastic control scheme, used for synchronizing the traffic signals |
| [74] | IoT-based traffic signal synchronization method | Uses magnetic sensors as the main IoT sensing technology | Not suitable for all kinds of road networks | Reduces the average travel time up to 39% using the road traffic simulator SUMO |
| [75] | Traffic signals synchronization for Bus Rapid Transit systems | Parallel evolutionary algorithm | In the context of Bus Rapid Transit systems |
|
| [76] | Model for synchronizing the traffic lights at road intersections | Hybrid metaheuristic approach that combines variable neighborhood search and Tabu search | Mathematical and computational complexity | Flexible and robust approach |
| [77] | Decentralized spatial decomposition of network for synchronization of traffic signals at the road junctions | Uses platoon model to calculate the weighted sum of delays induced by signalized crossings | More robust to failure | Distributed communication architecture for networking of traffic lights |
| [79] | To synchronize the traffic signals at intersections | Using floating car data (FCD) | Only a beginning step toward addressing the synchronization problem; need for more comprehensive optimization algorithms for general cases | Increases the traffic safety and energy efficiency of transportation systems |
| [80] | Traffic signal synchronization in a small urban road network | Cellular automation | Synchronization for two traffic signals only | Minimize total delay and maximize the flow |
| [82] | Survey of the synchronization techniques | Highlight current developments and give future perspectives on synchronization in V2V and V2X | Not Specified | Reviews synchronization standards and approaches for V2V and D2D-enabled cellular networks |
| [83] | Vehicle-to-Everything (V2X) speed synchronization at road junctions | Rule-based algorithm | Based on optimal scheduling | Improves the performance of cooperative intersection management |
| Reference Number | Objective/Context | Intersection | Traffic Signal Control Strategies | Source of Data Collection | Comments | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Isolated | Single | Network | Real Time | Fixed Time | Sensors/Detectors | Field Cameras | GPS/DSRC | |||
| [8] | Split Cycle Offset Optimization Technique (SCOOT) | ✓ | ✓ | Detectors |
| |||||
| [9] | Sydney Cooperation Adaptive Traffic System (SCATS) | ✓ | ✓ | Sensors |
| |||||
| [10] | Optimized Policies for Adaptive Control (OPAC) | ✓ | ✓ | ✓ |
| |||||
| [11] | Real-Time Hierarchical Optimized Distributed Effective System (RHODES) | ✓ | ✓ | ✓ | Decomposition of traffic network by modules that individually deal with sub-problems | |||||
| [15] | Traffic signal control of road networks in real time | ✓ | ✓ | Based on Webster procedure | ||||||
| [16] | Traffic monitoring and prediction on roads | ✓ | ✓ | ✓ |
| |||||
| [17,18] | Travel time prediction framework | Freeway | ✓ | Robust Travel Time framework |
| |||||
| [19] | To reduce waiting time of vehicles at road intersections | ✓ | ✓ | ✓ | A video-based adaptive traffic signaling system | |||||
| [21] | Assign equal green signal durations and arrange fair lane departure at an intersection | ✓ | ✓ | GPS | Adaptive traffic signal timings and lane scheduling | |||||
| [22] | To enhance the flow of traffic on current road network using a data fusion approach | ✓ | ✓ | GPS |
| |||||
| [23] | Traffic signal control system | ✓ | ✓ | ✓ |
| |||||
| [27] | To minimize the waiting time at a crossroad | ✓ | ✓ | ✓ |
| |||||
| [28,29] | WSN-based traffic light control systems | ✓ | ✓ | ✓ |
| |||||
| [30] | TSC at signalized intersections | ✓ | ✓ | V2V communication |
| |||||
| [31] | V2V traffic control for traffic management at intersections | ✓ | ✓ | DSRC | Virtual Traffic Light phenomenon based on DSRC | |||||
| [33,34] | Removal of intersection traffic signal infrastructures | ✓ | ✓ | DSRC |
| |||||
| [35] | Intersection traffic control scheme | ✓ | DSRC | Based on DSRC-Actuated Traffic Control | ||||||
| [36] | Autonomous intersection management (AIM) | ✓ | ✓ | Simulator |
| |||||
| [40] | Reinforcement Learning based traffic signal control | ✓ | ✓ | Mathematical Model |
| |||||
| [41] | Traffic signal control at a very large scale using Multiagent reinforcement learning (MARL) technique | ✓ | ✓ | Simulator |
| |||||
| [45] | Deep Q-learning algorithm based system for partially detected intelligent vehicles | ✓ | ✓ | DSRC |
| |||||
References
- Nielsen, O.A.; Frederiksen, R.; Simonsen, N. Using Expert System Rules to Establish Data for Intersections and Turns in Road Networks. Int. Trans. Oper. Res. 1998, 5, 569–581. [Google Scholar] [CrossRef]
- Sigua, R.G. Fundamentals of Traffic Engineering; University of the Philippines in Diliman: Quezon City, Philippines, 2008; p. 327. Available online: https://www.crcpress.com/Fundamentals-of-Picoscience/Sattler/p/book/9781466505094#googlePreviewContainer (accessed on 20 September 2021).
- Heidemann, D. Queue length and delay distributions at traffic signals. Transp. Res. Part B Methodol. 1994, 28, 377–389. [Google Scholar] [CrossRef]
- The National Traffic Signal Report Card. Available online: https://www.researchgate.net/publication/295961075_The_national_traffic_signal_report_card (accessed on 20 September 2021).
- Chen, L.; Englund, C. Cooperative Intersection Management: A Survey. IEEE Trans. Intell. Transp. Syst. 2015, 17, 570–586. [Google Scholar] [CrossRef]
- Zaghal, R.; Thabatah, K.; Salah, S. Towards a smart intersection using traffic load balancing algorithm. In Proceedings of the 2017 Computing Conference, London, UK, 18–20 July 2017. [Google Scholar]
- Shaikh, P.W.; El-Abd, M.; Khanafer, M.; Gao, K. A Review on Swarm Intelligence and Evolutionary Algorithms for Solving the Traffic Signal Control Problem. IEEE Trans. Intell. Transp. Syst. 2020, 23, 48–63. [Google Scholar] [CrossRef]
- Bing, B.; Carter, A.T. SCOOT: The World’s Foremost Adaptive Traffic Control System. Traffic Technology International’95. 1995. Available online: https://trid.trb.org/view/415757 (accessed on 20 September 2021).
- Sims, A.; Dobinson, K. The Sydney coordinated adaptive traffic (SCAT) system philosophy and benefits. IEEE Trans. Veh. Technol. 1980, 29, 130–137. [Google Scholar] [CrossRef]
- Gartner, N.H. Demand-responsive traffic signal control research. Transp. Res. Part A Gen. 1985, 19, 369–373. [Google Scholar] [CrossRef]
- Mirchandani, P.; Head, K.L. A real-time traffic signal control system: Architecture, algorithms, and analysis. Transp. Res. Part C Emerg. Technol. 2001, 9, 415–432. [Google Scholar] [CrossRef]
- Henry, J.; Farges, J.; Tuffal, J. The Prodyn Real Time Traffic Algorithm. In Proceedings of the Control in Transportation Systems, Baden-Baden, Germany, 20–22 April 1983; Elsevier BV: Amsterdam, The Netherlands, 1984; pp. 305–310. [Google Scholar]
- Brilon, W.; Wietholt, T. Experiences with Adaptive Signal Control in Germany. Transp. Res. Rec. J. Transp. Res. Board 2013, 2366, 9–16. [Google Scholar] [CrossRef]
- Costs|U.S. Department of Transportation. Available online: https://www.itskrs.its.dot.gov/costs (accessed on 20 September 2021).
- Kouvelas, A.; Aboudolas, K.; Papageorgiou, M.; Kosmatopoulos, E.B. A Hybrid Strategy for Real-Time Traffic Signal Control of Urban Road Networks. IEEE Trans. Intell. Transp. Syst. 2011, 12, 884–894. [Google Scholar] [CrossRef] [Green Version]
- Chaudhary, S.; Indu, S.; Chaudhury, S. Video-based road traffic monitoring and prediction using dynamic Bayesian networks. IET Intell. Transp. Syst. 2018, 12, 169–176. [Google Scholar] [CrossRef]
- Hadi, R.A.; Sulong, G.; George, L.E. Vehicle Detection and Tracking Techniques: A Concise Review. Signal Image Process. Int. J. 2014, 5, 1–12. [Google Scholar] [CrossRef]
- van Lint, J.; Hoogendoorn, S.; van Zuylen, H. Accurate freeway travel time prediction with state-space neural networks under missing data. Transp. Res. Part C Emerg. Technol. 2005, 13, 347–369. [Google Scholar] [CrossRef]
- Indu, S.; Nair, V.; Jain, S.; Chaudhury, S. Video based adaptive road traffic signaling. In Proceedings of the Seventh International Conference on Distributed Smart Cameras (ICDSC), Palm Springs, CA, USA, 29 October–1 November 2013. [Google Scholar]
- Zheng, W.; Lee, D.-H.; Shi, Q. Short-Term Freeway Traffic Flow Prediction: Bayesian Combined Neural Network Approach. J. Transp. Eng. 2006, 132, 114–121. [Google Scholar] [CrossRef] [Green Version]
- Sharma, K.K.; Indu, S. GPS Based Adaptive Traffic Light Timings and Lane Scheduling. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 4267–4274. [Google Scholar]
- Tiedong, W.; Jingjing, H. Applying floating car data in traffic monitoring. In Proceedings of the 2014 IEEE International Conference on Control Science and Systems Engineering, Yantai, China, 29–30 December 2014; pp. 96–99. [Google Scholar]
- Lin, Y. The Design and Simulation of Intelligent Traffic Signal Control System Based on Fuzzy Logic. In Foundations of Intelligent Systems; Springer: Berlin/Heidelberg, Germany, 2014; pp. 965–973. [Google Scholar] [CrossRef]
- Tanwar, R.; Majumdar, R.; Sidhu, G.S.; Srivastava, A. Removing traffic congestion at traffic lights using GPS technology. In Proceedings of the 2016 6th International Conference—Cloud System and Big Data Engineering (Confluence), Noida, India, 14–15 January 2016; pp. 575–579. [Google Scholar]
- Liu, Y. Big Data Technology and Its Analysis of Application in Urban Intelligent Transportation System. In Proceedings of the 2018 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS), Xiamen, China, 25–26 January 2018; pp. 17–19. [Google Scholar]
- Liping, X.; Dangying, L. A Novel Embedded Vehicle Terminal for Intelligent Transportation. In Proceedings of the 2014 Fifth International Conference on Intelligent Systems Design and Engineering Applications, Hunan, China, 15–16 June 2014; pp. 52–54. [Google Scholar] [CrossRef]
- Coll, P.; Factorovich, P.; Loiseau, I.; Gómez, R. A linear programming approach for adaptive synchronization of traffic signals. Int. Trans. Oper. Res. 2013, 20, 667–679. [Google Scholar] [CrossRef]
- Rida, N.; Hasbi, A. Traffic Lights Control using Wireless Sensors Networks. In Proceedings of the 3rd International Conference on Smart City Applications, Tetouan, Morocco, 10–11 October 2018. [Google Scholar] [CrossRef]
- Yousef, K.M.; Al-Karaki, J.N.; Shatnawi, A.M. Intelligent Traffic Light Flow Control System Using Wireless Sensors Networks. J. Inf. Sci. Eng. 2010, 26, 753–768. [Google Scholar]
- Liang, X.; Guler, S.I.; Gayah, V.V. An equitable traffic signal control scheme at isolated signalized intersections using Connected Vehicle technology. Transp. Res. Part C Emerg. Technol. 2019, 110, 81–97. [Google Scholar] [CrossRef]
- Zhang, R.; Schmutz, F.; Gerard, K.; Pomini, A.; Basseto, L.; Hassen, S.B.; Ishikawa, A.; Ozgunes, I.; Tonguz, O. Virtual Traffic Lights: System Design and Implementation. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Tonguz, O.K. Red light, green light—No light: Tomorrow’s communicative cars could take turns at intersections. IEEE Spectr. 2018, 55, 24–29. [Google Scholar] [CrossRef]
- VDOT Launches Smarter Roads. Available online: https://augustafreepress.com/vdot-launches-smarterroads/ (accessed on 20 September 2021).
- Virginia Connected Corridors|Virginia Tech Transportation Institute. Available online: https://www.vtti.vt.edu/facilities/vcc.html (accessed on 20 September 2021).
- Tonguz, O.K.; Zhang, R. Harnessing Vehicular Broadcast Communications: DSRC-Actuated Traffic Control. IEEE Trans. Intell. Transp. Syst. 2019, 21, 509–520. [Google Scholar] [CrossRef]
- Dresner, K.; Stone, P.A. Multiagent Approach to Autonomous Intersection Management. J. Artif. Intell. Res. 2008, 31, 591–656. [Google Scholar] [CrossRef] [Green Version]
- Wei, H.; Zheng, G.; Gayah, V.; Li, Z. A Survey on Traffic Signal Control Methods, 2020. Surv. Traffic Signal Control Methods 2019, 1. [Google Scholar] [CrossRef]
- Li, L.; Lv, Y.; Wang, F.Y. Traffic signal timing via deep reinforcement learning. IEEE/CAA J. Autom. Sin. 2016, 3, 247–254. Available online: https://www.academia.edu/28634266/Traffic_Signal_Timing_via_Deep_Reinforcement_Learning (accessed on 21 November 2021).
- Mousavi, S.S.; Schukat, M.; Howley, E. Traffic light control using deep policy-gradient and value-function-based reinforcement learning. IET Intell. Transp. Syst. 2017, 11, 417–423. [Google Scholar] [CrossRef] [Green Version]
- Zheng, G.; Xiong, Y.; Zang, X.; Feng, J.; Wei, H.; Zhang, H.; Li, Y.; Xu, K.; Li, Z. Learning Phase Competition for Traffic Signal Control. In Proceedings of the 28th ACM International Conference on Information and Knowledge Management, Beijing, China, 3–7 November 2019; pp. 1963–1972. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Ke, L.; Qiao, Z.; Chai, X. Large-Scale Traffic Signal Control Using a Novel Multiagent Reinforcement Learning. IEEE Trans. Cybern. 2021, 51, 174–187. [Google Scholar] [CrossRef] [PubMed]
- Wei, H.; Zheng, G.; Gayah, V.; Li, Z. Recent Advances in Reinforcement Learning for Traffic Signal Control. ACM SIGKDD Explor. Newsl. 2021, 22, 12–18. [Google Scholar] [CrossRef]
- Joo, H.; Ahmed, S.H.; Lim, Y. Traffic signal control for smart cities using reinforcement learning. Comput. Commun. 2020, 154, 324–330. [Google Scholar] [CrossRef]
- Zhang, R.; Leteurtre, R.; Striner, B.; Alanazi, A.; Alghafis, A.; Tonguz, O.K. Partially Detected Intelligent Traffic Signal Control: Environmental Adaptation. In Proceedings of the 2019 18th IEEE International Conference on Machine Learning and Applications (ICMLA), Boca Raton, FL, USA, 16–19 December 2019; pp. 1956–1960. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Ishikawa, A.; Wang, W.; Striner, B.; Tonguz, O.K. Using Reinforcement Learning With Partial Vehicle Detection for Intelligent Traffic Signal Control. IEEE Trans. Intell. Transp. Syst. 2021, 22, 404–415. [Google Scholar] [CrossRef] [Green Version]
- Dezani, H.; Marranghello, N.; Damiani, F. Genetic algorithm-based traffic lights timing optimization and routes definition using Petri net model of urban traffic flow. IFAC Proc. Vol. 2014, 47, 11326–11331. [Google Scholar] [CrossRef] [Green Version]
- Dezani, H.; Bassi, R.D.; Marranghello, N.; Gomes, L.; Damiani, F.; da Silva, I.N. Optimizing urban traffic flow using Genetic Algorithm with Petri net analysis as fitness function. Neurocomputing 2014, 124, 162–167. [Google Scholar] [CrossRef]
- Sabar, N.R.; Kieu, L.M.; Chung, E.; Tsubota, T.; de Almeida, P.E.M. A memetic algorithm for real world multi-intersection traffic signal optimisation problems. Eng. Appl. Artif. Intell. 2017, 63, 45–53. [Google Scholar] [CrossRef]
- Li, X.; Sun, J.-Q. Signal Multiobjective Optimization for Urban Traffic Network. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3529–3537. [Google Scholar] [CrossRef]
- García-Nieto, J.; Alba, E.; Carolina Olivera, A. Swarm intelligence for traffic light scheduling: Application to real urban areas. Eng. Appl. Artif. Intell. 2012, 25, 274–283. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, H.-B.; Liu, X.-Q.; Chen, X.-B. Optimal control for region of the city traffic signal base on Selective particle swarm optimization algorithm. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 2723–2728. [Google Scholar]
- Wijaya, I.G.P.S.; Uchimura, K.; Koutaki, G. Traffic light signal parameters optimization using particle swarm optimization. In Proceedings of the 2015 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 20–21 May 2015; pp. 11–16. [Google Scholar]
- Baskan, O.; Haldenbilen, S. Ant Colony Optimization Approach for Optimizing Traffic Signal Timings. Ant Colony Optim.—Methods Appl. 2011, 14, 205–220. [Google Scholar] [CrossRef] [Green Version]
- Renfrew, D.; Yu, X.-H. Traffic signal optimization using Ant Colony Algorithm. In Proceedings of the 2012 International Joint Conference on Neural Networks (IJCNN), Brisbane, Australia, 10–15 June 2012; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Dell’Orco, M.; Baskan, O.; Marinelli, M. A Harmony Search Algorithm approach for optimizing traffic signal timings. Promet—Traffic Transp. 2013, 25, 349–358. [Google Scholar] [CrossRef] [Green Version]
- Gao, K.; Zhang, Y.; Sadollah, A.; Su, R. Optimizing urban traffic light scheduling problem using harmony search with ensemble of local search. Appl. Soft Comput. 2016, 48, 359–372. [Google Scholar] [CrossRef]
- Milanes, V.; Perez, J.; Onieva, E.; Gonzalez, C. Controller for Urban Intersections Based on Wireless Communications and Fuzzy Logic. IEEE Trans. Intell. Transp. Syst. 2009, 11, 243–248. [Google Scholar] [CrossRef] [Green Version]
- Bi, Y.; Lu, X.; Sun, Z.; Srinivasan, D.; Sun, Z. Optimal Type-2 Fuzzy System For Arterial Traffic Signal Control. IEEE Trans. Intell. Transp. Syst. 2017, 19, 3009–3027. [Google Scholar] [CrossRef]
- Moghaddam, M.J.; Hosseini, M.; Safabakhsh, R. Traffic light control based on fuzzy Q-leaming. In Proceedings of the 2015 International Symposium on Artificial Intelligence and Signal Processing (AISP), Mashhad, Iran, 3–5 March 2015; pp. 124–128. [Google Scholar]
- Firdous, M.; Iqbal, F.U.D.; Ghafoor, N.; Qureshi, N.K.; Naseer, N. Traffic Light Control System for Four-Way Intersection and T-Crossing Using Fuzzy Logic. In Proceedings of the 2019 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 29–31 March 2019; pp. 178–182. [Google Scholar]
- Hawi, R.; Okeyo, G.; Kimwele, M. Smart traffic light control using fuzzy logic and wireless sensor network. In Proceedings of the 2017 Computing Conference, London, UK, 18–20 July 2017; pp. 450–460. [Google Scholar] [CrossRef]
- Hu, X.; Lu, J.; Wang, W.; Zhirui, Y. Traffic Signal Synchronization in the Saturated High-Density Grid Road Network. Comput. Intell. Neurosci. 2015, 2015, 1–11. [Google Scholar] [CrossRef]
- Iyer, V.; Jadhav, R.; Mavchi, U.; Abraham, J. Intelligent traffic signal synchronization using fuzzy logic and Q-learning. In Proceedings of the 2016 International Conference on Computing, Analytics and Security Trends (CAST), Pune, India, 19–21 December 2016; pp. 156–161. [Google Scholar] [CrossRef]
- Amogh, A.S.; Pujari, S.; Gowda, S.N.; Nyamati, V.M. Traffic timer synchronization based on congestion. In Proceedings of the 2016 International Conference on Computation System and Information Technology for Sustainable Solutions (CSITSS), Bengaluru, India, 6–8 October 2016; pp. 255–260. [Google Scholar] [CrossRef]
- Khan, A.; Ullah, F.; Kaleem, Z.; Rahman, S.U.; Cho, Y.Z. Sensor-based self-organized traffic control at intersections. In Proceedings of the 2017 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 18–20 October 2017; pp. 634–638. [Google Scholar] [CrossRef]
- Guler, S.I.; Menendez, M.; Meier, L. Using connected vehicle technology to improve the efficiency of intersections. Transp. Res. Part C Emerg. Technol. 2014, 46, 121–131. [Google Scholar] [CrossRef]
- Sirikham, A. Development of a Wireless Stop Light Synchronization System for Single-lane Traffic Control. In Proceedings of the 2021 18th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Mai, Thailand, 19–22 May 2021; pp. 1006–1009. [Google Scholar] [CrossRef]
- Kumar, D.M.; Arthi, R.; Aravindhan, C.; Roch, A.A.; Priyadarsini, K.; Deny, J. Traffic Congestion Control Synchronizing and Rerouting Using LoRa. Microprocess. Microsyst. 2021, 104048. [Google Scholar] [CrossRef]
- Reddy, K.S.; Shabarinath, B. Timing and Synchronization for Explicit FSM Based Traffic Light Controller. In Proceedings of the 2017 IEEE 7th International Advance Computing Conference (IACC), Hyderabad, India, 5–7 January 2017; pp. 526–529. [Google Scholar]
- Khedkar, A.; Kumar, V. Self synchronization based air traffic control and collision avoidance system. In Proceedings of the 2011 IEEE/AIAA 30th Digital Avionics Systems Conference, Seattle, WA, USA, 16–20 October 2011; pp. 1–8. [Google Scholar] [CrossRef]
- Wu, J.; Yan, F.; Kuang, P. Distributed urban traffic signal control based on spontaneous synchronization. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 2202–2207. [Google Scholar] [CrossRef]
- Adacher, L.; Tiriolo, M. A Distributed Approach for Traffic Signal Synchronization Problem. In Proceedings of the 2016 Third International Conference on Mathematics and Computers in Sciences and in Industry (MCSI), Chania, Greece, 27–29 August 2016; pp. 191–196. [Google Scholar]
- Adacher, L. A Global Optimization Approach to Solve the Traffic Signal Synchronization Problem. Procedia—Soc. Behav. Sci. 2012, 54, 1270–1277. [Google Scholar] [CrossRef]
- Aleko, D.R.; Djahel, S. An IoT Enabled Traffic Light Controllers Synchronization Method for Road Traffic Congestion Mitigation. In Proceedings of the 2019 IEEE International Smart Cities Conference (ISC2), Casablanca, Morocco, 14–17 October 2019; pp. 709–715. [Google Scholar]
- Nesmachnow, S.; Massobrio, R.; Arreche, E.; Mumford, C.; Olivera, A.C.; Vidal, P.J.; Tchernykh, A. Traffic lights synchronization for Bus Rapid Transit using a parallel evolutionary algorithm. Int. J. Transp. Sci. Technol. 2019, 8, 53–67. [Google Scholar] [CrossRef]
- Cabezas, X.; García, S.; Salas, S.D. A hybrid heuristic approach for traffic light synchronization based on the MAXBAND. Soft Comput. Lett. 2019, 1, 100001. [Google Scholar] [CrossRef]
- Adacher, L.; Gemma, A.; Oliva, G. Decentralized Spatial Decomposition for Traffic Signal Synchronization. Transp. Res. Procedia 2014, 3, 992–1001. [Google Scholar] [CrossRef]
- Rodriguez, M.; Fathy, H. Self-Synchronization of Connected Vehicles in Traffic Networks: What Happens When We Think of Vehicles as Waves? In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 2651–2657. [Google Scholar] [CrossRef]
- Astarita, V.; Festa, D.C.; Giofre, V.P. Cooperative-Competitive Paradigm in Traffic Signal Synchronization Based on Floating Car Data. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar]
- Yingxiang, Y.; Min, Y.; Lei, S.; Jian, S.; Yong, W. Traffic Signal Synchronization of a Small Urban Network Using Cellular Automaton. In Proceedings of the 2011 Third International Conference on Measuring Technology and Mechatronics Automation, Shanghai, China, 6–7 January 2011; Volume 3, pp. 1035–1039. [Google Scholar]
- Li, Z.; Ding, Z.; Wang, Y.; Fu, Y. Time synchronization method among VANET devices. In Proceedings of the 2017 International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 22–24 March 2017; pp. 2096–2101. [Google Scholar]
- Abbasi, M.; Shahraki, A.; Barzegar, H.R.; Pahl, C. Synchronization Techniques in “Device to Device- and Vehicle to Vehicle-Enabled” Cellular Networks: A survey. Comput. Electr. Eng. 2021, 90, 106955. [Google Scholar] [CrossRef]
- Du, W.; Abbas-Turki, A.; Koukam, A.; Galland, S.; Gechter, F. On the V2X speed synchronization at intersections: Rule based System for extended virtual platooning. Procedia Comput. Sci. 2018, 141, 255–262. [Google Scholar] [CrossRef]
- Tomar, I.; Indu, S.; Pandey, N. Traffic Signal Control Methods: Current Status, Challenges, and Emerging Trends. In Proceedings of Data Analytics and Management; Springer Science and Business Media LLC: Singapore, 2022; Volume 90, pp. 151–163. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tomar, I.; Sreedevi, I.; Pandey, N. State-of-Art Review of Traffic Light Synchronization for Intelligent Vehicles: Current Status, Challenges, and Emerging Trends. Electronics 2022, 11, 465. https://doi.org/10.3390/electronics11030465
Tomar I, Sreedevi I, Pandey N. State-of-Art Review of Traffic Light Synchronization for Intelligent Vehicles: Current Status, Challenges, and Emerging Trends. Electronics. 2022; 11(3):465. https://doi.org/10.3390/electronics11030465
Chicago/Turabian StyleTomar, Ishu, Indu Sreedevi, and Neeta Pandey. 2022. "State-of-Art Review of Traffic Light Synchronization for Intelligent Vehicles: Current Status, Challenges, and Emerging Trends" Electronics 11, no. 3: 465. https://doi.org/10.3390/electronics11030465
APA StyleTomar, I., Sreedevi, I., & Pandey, N. (2022). State-of-Art Review of Traffic Light Synchronization for Intelligent Vehicles: Current Status, Challenges, and Emerging Trends. Electronics, 11(3), 465. https://doi.org/10.3390/electronics11030465