
Noise Immunity-Enhanced Capacitance Readout Circuit for Human Interaction Detection in Human Body Communication Systems

Abstract
:1. Introduction
2. Overall Architecture
3. Circuit Description
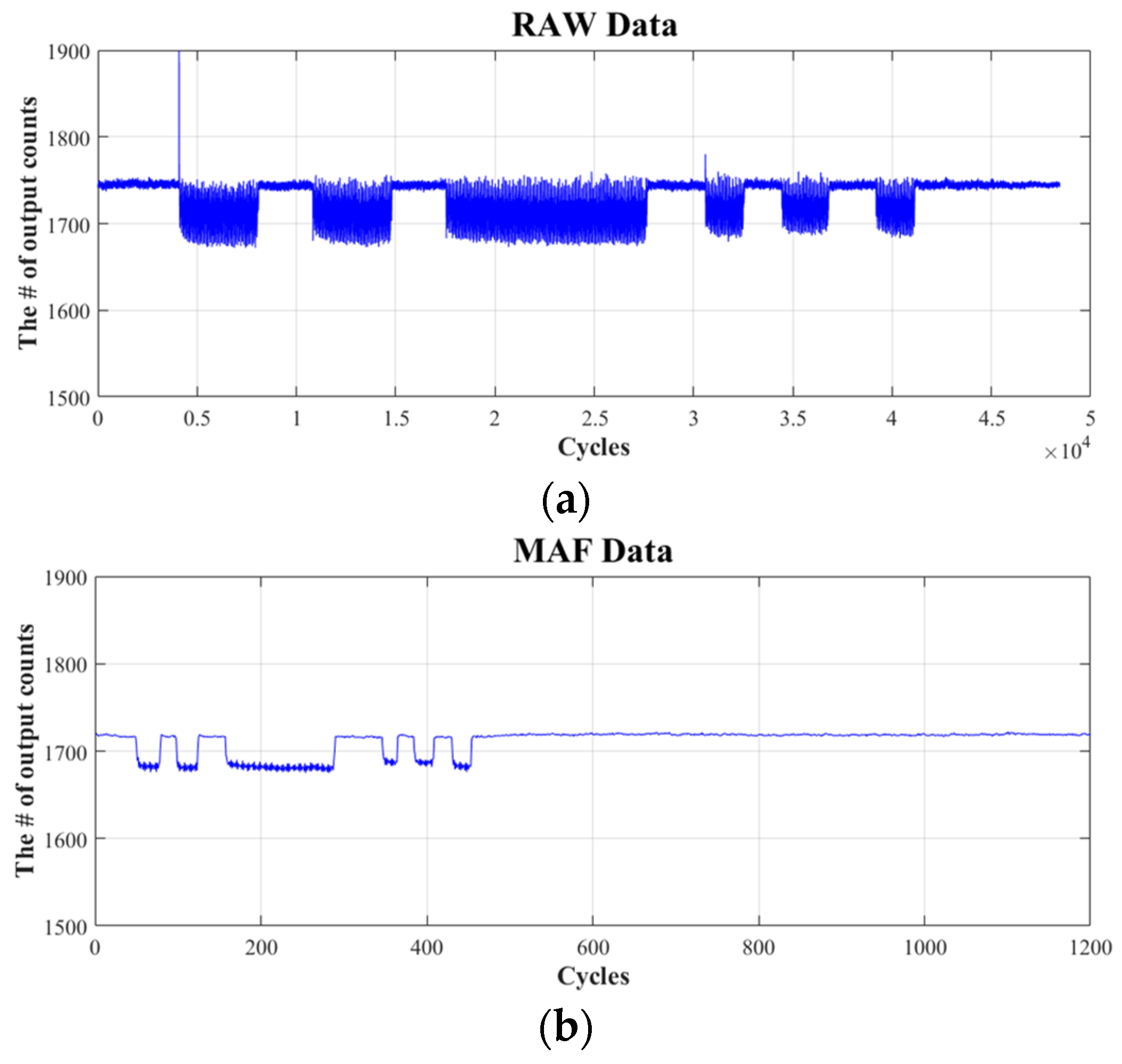
3.1. Moving Average Filter
3.2. ΔC Detection Algorithm
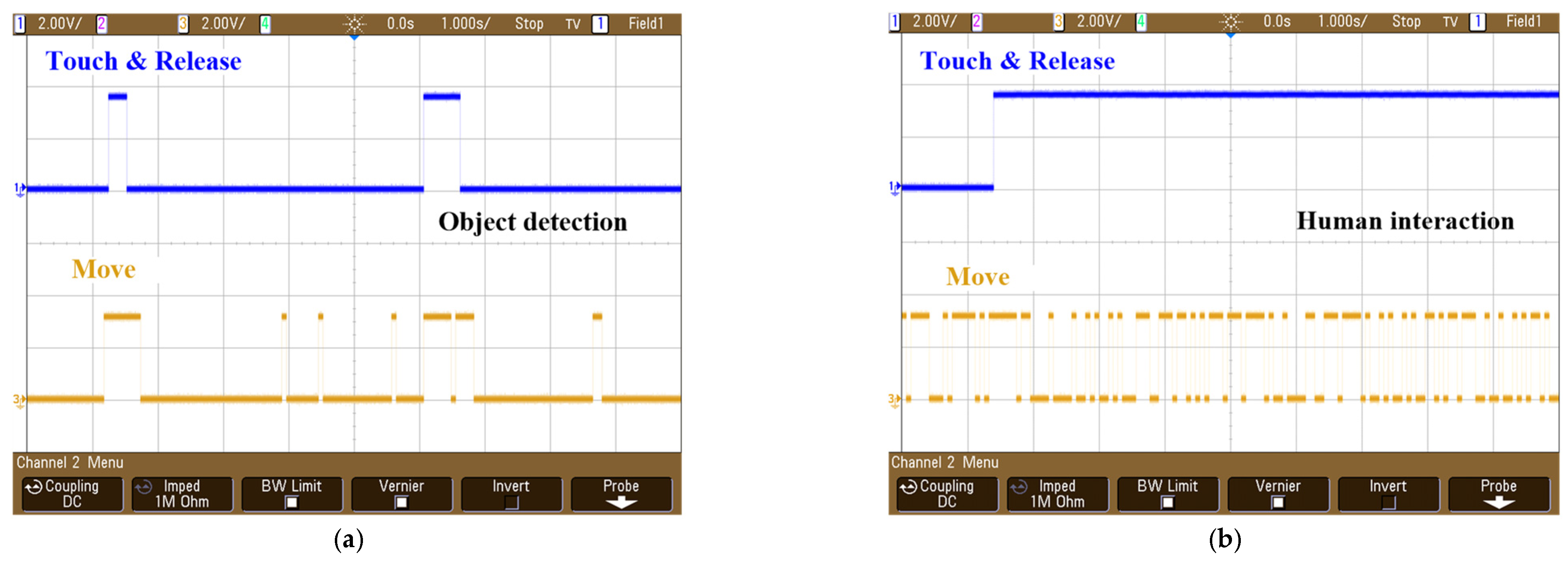
4. Measurement Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhao, J.F.; Chen, X.M.; Liang, B.D.; Chen, Q.X. A review on human body communication: Signal propagation model, communication performance, and experimental issues. Wirel. Commun. Mob. Comput. 2017, 2017, 15. [Google Scholar] [CrossRef] [Green Version]
- Das, D.; Maity, S.; Chatterjee, B.; Sen, S. Enabling covert body area network using electro-quasistatic human body communication. Sci. Rep. 2019, 9, 1–14. [Google Scholar] [CrossRef]
- Kang, T.; Oh, K.-I.; Hwang, J.-H.; Kim, S.; Park, H.; Lee, J. Measurement and analysis of electric signal transmission using human body as medium for WBAN applications. IEEE Trans. Instrum. Meas. 2018, 67, 527–537. [Google Scholar] [CrossRef]
- Kang, T.; Hwang, J.-H.; Kim, H.; Kim, S.-E.; Oh, K.-I.; Lee, J.-J.; Park, H.-I.; Kim, S.-E.; Oh, W.; Lee, W. Measurement and Evaluation of Electric Signal Transmission through Human Body by Channel Modeling, System Design, and Implementation. IEEE Trans. Instrum. Meas. 2021, 70, 1–14. [Google Scholar] [CrossRef]
- Kang, T.; Oh, K.-I.; Lee, J.-J.; Park, B.-S.; Oh, W.; Kim, S.-E. Measurement and Analysis of Human Body Channel Response for Biometric Recognition. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Tan, Z.; Jiang, H.; Zhang, H.; Tang, X.; Xin, H.; Nihtianov, S. Power-Efficiency Evolution of Capacitive Sensor Interfaces. IEEE Sens. J. 2020, 21, 12457–12468. [Google Scholar] [CrossRef]
- Tan, Z.; Shalmany, S.H.; Meijer, G.C.; Pertijs, M.A. An energy-efficient 15-bit capacitive-sensor interface based on period modulation. IEEE J. Solid-State Circuits 2012, 47, 1703–1711. [Google Scholar] [CrossRef]
- He, Y.; Chang, Z.-Y.; Pakula, L.; Shalmany, S.H.; Pertijs, M. 27.7 A 0.05 mm 2 1V capacitance-to-digital converter based on period modulation. In Proceedings of the 2015 IEEE International Solid-State Circuits Conference-(ISSCC) Digest of Technical Papers, San Francisco, CA, USA, 22–26 February 2015; pp. 1–3. [Google Scholar]
- Jung, W.; Jeong, S.; Oh, S.; Sylvester, D.; Blaauw, D. 27.6 A 0.7 pF-to-10nF fully digital capacitance-to-digital converter using iterative delay-chain discharge. In Proceedings of the 2015 IEEE International Solid-State Circuits Conference-(ISSCC) Digest of Technical Papers, San Francisco, CA, USA, 22–26 February 2015; pp. 1–3. [Google Scholar]
- Cong, P.; Chaimanonart, N.; Ko, W.H.; Young, D.J. A wireless and batteryless 10-bit implantable blood pressure sensing microsystem with adaptive RF powering for real-time laboratory mice monitoring. IEEE J. Solid-State Circuits 2009, 44, 3631–3644. [Google Scholar] [CrossRef]
- Jiang, H.; Wang, Z.; Zhang, C.; Jiang, H.; Wang, Z. A combined low power SAR capacitance-to-digital analog-to-digital converter for multisensory system. Analog Integr. Circuits Signal Processing 2013, 75, 311–322. [Google Scholar] [CrossRef]
- Ha, H.; Sylvester, D.; Blaauw, D.; Sim, J.-Y. 12.6 A 160nW 63.9 fJ/conversion-step capacitance-to-digital converter for ultra-low-power wireless sensor nodes. In Proceedings of the 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), San Francisco, CA, USA, 9–13 February 2014; pp. 220–221. [Google Scholar]
- Yang, R.; Pertijs, M.A.; Nihtianov, S. A precision capacitance-to-digital converter with 16.7-bit ENOB and 7.5-ppm/°C thermal drift. IEEE J. Solid-State Circuits 2017, 52, 3018–3031. [Google Scholar] [CrossRef]
- Narasimman, N.; Nag, D.; Chuan, K.C.T.; Kim, T.T. A 1.2 V, 0.84 pJ/conv.-Step ultra-low power capacitance to digital converter for microphone based auscultation. In Proceedings of the 2017 IEEE Custom Integrated Circuits Conference (CICC), Austin, TX, USA, 30 April–3 May 2017; pp. 1–4. [Google Scholar]
- Narasimman, N.; Nag, D.; Chai, K.T.; Kim, T.T.-H. A Capacitance to Digital Converter using Continuous Time ΔΣ Modulator for Microphone-based Auscultation. IEEE Sens. J. 2021, 21, 13373–13383. [Google Scholar] [CrossRef]
- Liu, B.; Hoseini, Z.; Lee, K.-S.; Lee, Y.-M. On-chip touch sensor readout circuit using passive sigma-delta modulator capacitance-to-digital converter. IEEE Sens. J. 2015, 15, 3893–3902. [Google Scholar] [CrossRef]
- Asgari, M.; Lee, K.-S.; Lee, Y.-M. Touch sensor readout circuit with comparator threshold self-adjustment. IEICE Electron. Express 2018, 15, 20171065. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| This Work | [16] | [17] | [15] | Azoteq IQS211A/B 3 | Microchip MTCH101 3 | ||||
|---|---|---|---|---|---|---|---|---|---|
| Process (nm) | 65 | 350 | 350 | 180 | - | - | |||
| Supply Voltage (V) | 1.2 | 3.3 | 3.3 | 1.2 | 3.3 | 3.3 | |||
| Area (mm2) | 0.0067 | 0.1 | 0.0027 | 0.42 | - | - | |||
| Applications | Touch and Proximity | Touch Panel | Touch Panel | Pressure Sensor | Touch and Proximity | Touch and Proximity | |||
| ADC-Free | O | O | O | X | X | X | |||
| Noise Immunity | O | O | X | O | X | X | |||
| Object Detection | O | X | X | X | O | X | |||
| Power (uW) | 7.5 | 65 | 52 | 50.4 | 254.1 | 6.6 | 660 | 178.2 | |
| LPF BW (Hz) | 610.4 | 9.5 | 1000 1 | - | 4000 | - | - | - | - |
| Response Time (ms) | 1.6 | 105 | 20 2 | 20 2 | 0.125 | 9 | 160 | 80 | 640 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, S.-W.; Seong, K.; Lee, S.; Baek, K.-H.; Shim, Y. Noise Immunity-Enhanced Capacitance Readout Circuit for Human Interaction Detection in Human Body Communication Systems. Electronics 2022, 11, 577. https://doi.org/10.3390/electronics11040577
Choi S-W, Seong K, Lee S, Baek K-H, Shim Y. Noise Immunity-Enhanced Capacitance Readout Circuit for Human Interaction Detection in Human Body Communication Systems. Electronics. 2022; 11(4):577. https://doi.org/10.3390/electronics11040577
Chicago/Turabian StyleChoi, Seong-Wook, Kiho Seong, Sukho Lee, Kwang-Hyun Baek, and Yong Shim. 2022. "Noise Immunity-Enhanced Capacitance Readout Circuit for Human Interaction Detection in Human Body Communication Systems" Electronics 11, no. 4: 577. https://doi.org/10.3390/electronics11040577
APA StyleChoi, S. -W., Seong, K., Lee, S., Baek, K. -H., & Shim, Y. (2022). Noise Immunity-Enhanced Capacitance Readout Circuit for Human Interaction Detection in Human Body Communication Systems. Electronics, 11(4), 577. https://doi.org/10.3390/electronics11040577